
Synchronization of a Network Composed of Stochastic Hindmarsh–Rose Neurons


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Synchronization of Complex Networks and Multi-Agent Systems
1.2. Synchronization of Neurons
1.3. Purpose and Outline of This Paper
1.4. Notation
- The Kronecker product is denoted by the symbol ⊗.
- The expected value of a random variable is denoted by .
- If are matrices, then is a block-diagonal matrix with blocks on the diagonal.
- The symbol denotes the transposed matrix.
- The time argument t is often omitted: . However, if dependence on this time argument needs to be emphasized or the time argument is different from t, it is written in full.
- The time delay is written in the subscript: .
- The N-dimensional identity matrix is denoted by I.
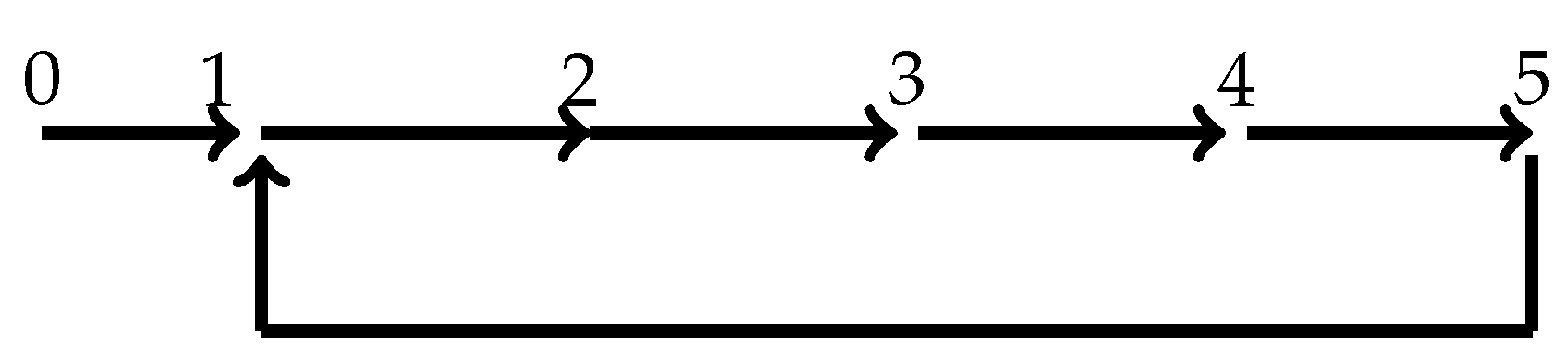
2. Graph Theory
3. Synchronization of Stochastic Multi-Agent Systems
4. The Hindmarsh–Rose Neuronal Model
5. Synchronization of the Membrane Potential in the Stochastic Neuronal Networks
6. Synchronization of the Adaptation and Recovery Variables
7. Example
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Erdös, P.; Rényi, A. On the evolution of random graphs. Publ. Math. Inst. Hung. Acad. Sci. 1960, 5, 17–61. [Google Scholar]
- Boccaletti, S.; Pisarchik, A.; del Genio, C.; Amann, A. Synchronization: From Coupled Systems to Complex Networks; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Fujisaka, H.; Yamada, T. Stability Theory of Synchronized Motion in Coupled-Oscillator Systems. Prog. Theor. Phys. 1983, 69, 32–47. [Google Scholar] [CrossRef]
- Pikovsky, A.S. On the interaction of strange attractors. Z. Phys. B Condens. Matter 1984, 55, 149–154. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef]
- Rosenblum, M.G.; Pikovsky, A.S.; Kurths, J. Phase Synchronization of Chaotic Oscillators. Phys. Rev. Lett. 1996, 76, 1804–1807. [Google Scholar] [CrossRef] [PubMed]
- Rulkov, N.F.; Sushchik, M.M.; Tsimring, L.S.; Abarbanel, H.D.I. Generalized synchronization of chaos in directionally coupled chaotic systems. Phys. Rev. E 1995, 51, 980–994. [Google Scholar] [CrossRef] [PubMed]
- Kocarev, L.; Parlitz, U. Generalized Synchronization, Predictability, and Equivalence of Unidirectionally Coupled Dynamical Systems. Phys. Rev. Lett. 1996, 76, 1816–1819. [Google Scholar] [CrossRef] [PubMed]
- Mainieri, R.; Rehacek, J. Projective Synchronization In Three-Dimensional Chaotic Systems. Phys. Rev. Lett. 1999, 82, 3042–3045. [Google Scholar] [CrossRef]
- Rosenblum, M.G.; Pikovsky, A.S.; Kurths, J. From Phase to Lag Synchronization in Coupled Chaotic Oscillators. Phys. Rev. Lett. 1997, 78, 4193–4196. [Google Scholar] [CrossRef]
- Plotnikov, S.A.; Fradkov, A.L. On synchronization in heterogeneous FitzHugh–Nagumo networks. Chaos Solitons Fractals 2019, 121, 85–91. [Google Scholar] [CrossRef]
- Abarbanel, H.D.I.; Rulkov, N.F.; Sushchik, M.M. Generalized synchronization of chaos: The auxiliary system approach. Phys. Rev. E 1996, 53, 4528–4535. [Google Scholar] [CrossRef]
- Lynnyk, V.; Rehák, B.; Čelikovský, S. On applicability of auxiliary system approach in complex network with ring topology. Cybern. Phys. 2019, 8, 143–152. [Google Scholar] [CrossRef]
- Lynnyk, V.; Rehák, B.; Čelikovský, S. On detection of generalized synchronization in the complex network with ring topology via the duplicated systems approach. In Proceedings of the 8th International Conference on Systems and Control (ICSC), Marrakesh, Morocco, 23–25 October 2019. [Google Scholar]
- Hramov, A.E.; Koronovskii, A.A.; Moskalenko, O.I. Generalized synchronization onset. Europhys. Lett. (EPL) 2005, 72, 901–907. [Google Scholar] [CrossRef]
- Moskalenko, O.I.; Koronovskii, A.A.; Hramov, A.E. Generalized synchronization of chaos for secure communication: Remarkable stability to noise. Phys. Lett. A 2010, 374, 2925–2931. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, J.; Lu, J.; Lu, J. On Applicability of Auxiliary System Approach to Detect Generalized Synchronization in Complex Network. IEEE Trans. Autom. Control 2017, 62, 3468–3473. [Google Scholar] [CrossRef]
- Karimov, A.; Tutueva, A.; Karimov, T.; Druzhina, O.; Butusov, D. Adaptive Generalized Synchronization between Circuit and Computer Implementations of the Rössler System. Appl. Sci. 2020, 11, 81. [Google Scholar] [CrossRef]
- Koronovskii, A.A.; Moskalenko, O.I.; Pivovarov, A.A.; Khanadeev, V.A.; Hramov, A.E.; Pisarchik, A.N. Jump intermittency as a second type of transition to and from generalized synchronization. Phys. Rev. E 2020, 102, 012205. [Google Scholar] [CrossRef]
- Lynnyk, V.; Čelikovský, S. Generalized synchronization of chaotic systems in a master–slave configuration. In Proceedings of the 2021 23rd International Conference on Process Control (PC), Strbske Pleso, Slovakia, 1–4 June 2021. [Google Scholar]
- Lynnyk, V.; Čelikovský, S. Anti-synchronization chaos shift keying method based on generalized Lorenz system. Kybernetika 2010, 46, 1–18. [Google Scholar]
- Čelikovský, S.; Lynnyk, V. Message Embedded Chaotic Masking Synchronization Scheme Based on the Generalized Lorenz System and Its Security Analysis. Int. J. Bifurc. Chaos 2016, 26, 1650140. [Google Scholar] [CrossRef]
- Čelikovský, S.; Lynnyk, V. Lateral Dynamics of Walking-Like Mechanical Systems and Their Chaotic Behavior. Int. J. Bifurc. Chaos 2019, 29, 1930024. [Google Scholar] [CrossRef]
- Karimov, T.; Butusov, D.; Andreev, V.; Karimov, A.; Tutueva, A. Accurate Synchronization of Digital and Analog Chaotic Systems by Parameters Re-Identification. Electronics 2018, 7, 123. [Google Scholar] [CrossRef]
- Andrievsky, B. Numerical evaluation of controlled synchronization for chaotic Chua systems over the limited-band data erasure channel. Cybern. Phys. 2016, 5, 43–51. [Google Scholar]
- Rehák, B.; Lynnyk, V. Synchronization of symmetric complex networks with heterogeneous time delays. In Proceedings of the 2019 22nd International Conference on Process Control (PC19), Strbske Pleso, Slovakia, 11–14 June 2019; pp. 68–73. [Google Scholar]
- Rehák, B.; Lynnyk, V. Network-based control of nonlinear large-scale systems composed of identical subsystems. J. Frankl. Inst. 2019, 356, 1088–1112. [Google Scholar] [CrossRef]
- Hramov, A.E.; Khramova, A.E.; Koronovskii, A.A.; Boccaletti, S. Synchronization in networks of slightly nonidentical elements. Int. J. Bifurc. Chaos 2008, 18, 845–850. [Google Scholar] [CrossRef]
- Rehák, B.; Lynnyk, V. Decentralized networked stabilization of a nonlinear large system under quantization. In Proceedings of the 8th IFAC Workshop on Distributed Estimation and Control in Networked Systems (NecSys 2019), Chicago, IL, USA, 16–17 September 2019; pp. 1–6. [Google Scholar]
- Boccaletti, S.; Kurths, J.; Osipov, G.; Valladares, D.; Zhou, C. The synchronization of chaotic systems. Phys. Rep. Rev. Sect. Phys. Lett. 2002, 366, 1–101. [Google Scholar] [CrossRef]
- Chen, G.; Dong, X. From Chaos to Order; World Scientific: Singapore, 1998. [Google Scholar]
- Rehák, B.; Lynnyk, V. Consensus of a multi-agent systems with heterogeneous delays. Kybernetika 2020, 56, 363–381. [Google Scholar] [CrossRef]
- Rehák, B.; Lynnyk, V. Leader-following synchronization of a multi-agent system with heterogeneous delays. Front. Inf. Technol. Electron. Eng. 2021, 22, 97–106. [Google Scholar] [CrossRef]
- Hu, M.; Guo, L.; Hu, A.; Yang, Y. Leader-following consensus of linear multi-agent systems with randomly occurring nonlinearities and uncertainties and stochastic disturbances. Neurocomputing 2015, 149, 884–890. [Google Scholar] [CrossRef]
- Ren, H.; Deng, F.; Peng, Y.; Zhang, B.; Zhang, C. Exponential consensus of nonlinear stochastic multi-agent systems with ROUs and RONs via impulsive pinning control. IET Control Theory Appl. 2017, 11, 225–236. [Google Scholar] [CrossRef]
- Ma, L.; Wang, Z.; Han, Q.L.; Liu, Y. Consensus control of stochastic multi-agent systems: A survey. Sci. China Inf. Sci. 2017, 60, 1869–1919. [Google Scholar] [CrossRef]
- Čelikovský, S.; Lynnyk, V.; Chen, G. Robust synchronization of a class of chaotic networks. J. Frankl. Inst. 2013, 350, 2936–2948. [Google Scholar] [CrossRef]
- Malik, S.; Mir, A. Synchronization of Hindmarsh Rose Neurons. Neural Netw. 2020, 123, 372–380. [Google Scholar]
- Ngouonkadi, E.M.; Fotsin, H.; Fotso, P.L.; Tamba, V.K.; Cerdeira, H.A. Bifurcations and multistability in the extended Hindmarsh–Rose neuronal oscillator. Chaos Solitons Fractals 2016, 85, 151–163. [Google Scholar] [CrossRef]
- Hodgkin, A.L.; Huxley, A. A quantitative description of membrane current and its application to conduction and excitation in nerve. J. Physiol. 1952, 117, 500–544. [Google Scholar] [CrossRef] [PubMed]
- Ostrovskiy, V.; Butusov, D.; Karimov, A.; Andreev, V. Discretization effects during numerical investigation of Hodgkin-Huxley neuron model. Bull. Bryansk State Tech. Univ. 2019, 94–101. [Google Scholar] [CrossRef]
- Andreev, V.; Ostrovskii, V.; Karimov, T.; Tutueva, A.; Doynikova, E.; Butusov, D. Synthesis and Analysis of the Fixed-Point Hodgkin-Huxley Neuron Model. Electronics 2020, 9, 434. [Google Scholar] [CrossRef]
- FitzHugh, R. Impulses and Physiological States in Theoretical Models of Nerve Membrane. Biophys. J. 1961, 1, 445–466. [Google Scholar] [CrossRef]
- Nagumo, J.; Arimoto, S.; Yoshizawa, S. An Active Pulse Transmission Line Simulating Nerve Axon. Proc. IRE 1962, 50, 2061–2070. [Google Scholar] [CrossRef]
- Hindmarsh, J.; Rose, R. A model of neuronal bursting using three coupled first order differential equations. Proc. R. Soc. London Ser. B Contain. Pap. A Biol. Character. R. Soc. (Great Br.) 1984, 221, 87–102. [Google Scholar]
- epek, M.; Fronczak, P. Spatial evolution of Hindmarsh–Rose neural network with time delays. Nonlinear Dyn. 2018, 92, 751–761. [Google Scholar]
- Ding, K.; Han, Q.L. Master–slave synchronization criteria for chaotic Hindmarsh–Rose neurons using linear feedback control. Complexity 2016, 21, 319–327. [Google Scholar] [CrossRef]
- Nguyen, L.H.; Hong, K.S. Adaptive synchronization of two coupled chaotic Hindmarsh–Rose neurons by controlling the membrane potential of a slave neuron. Appl. Math. Model. 2013, 37, 2460–2468. [Google Scholar] [CrossRef]
- Ding, K.; Han, Q.L. Synchronization of two coupled Hindmarsh–Rose neurons. Kybernetika 2015, 51, 784–799. [Google Scholar] [CrossRef]
- Hettiarachchi, I.T.; Lakshmanan, S.; Bhatti, A.; Lim, C.P.; Prakash, M.; Balasubramaniam, P.; Nahavandi, S. Chaotic synchronization of time-delay coupled Hindmarsh–Rose neurons via nonlinear control. Nonlinear Dyn. 2016, 86, 1249–1262. [Google Scholar] [CrossRef]
- Equihua, G.G.V.; Ramirez, J.P. Synchronization of Hindmarsh–Rose neurons via Huygens-like coupling. IFAC-PapersOnLine 2018, 51, 186–191. [Google Scholar] [CrossRef]
- Yu, H.; Peng, J. Chaotic synchronization and control in nonlinear-coupled Hindmarsh–Rose neural systems. Chaos Solitons Fractals 2006, 29, 342–348. [Google Scholar] [CrossRef]
- Xu, Y.; Jia, Y.; Ma, J.; Alsaedi, A.; Ahmad, B. Synchronization between neurons coupled by memristor. Chaos Solitons Fractals 2017, 104, 435–442. [Google Scholar] [CrossRef]
- Bandyopadhyay, A.; Kar, S. Impact of network structure on synchronization of Hindmarsh–Rose neurons coupled in structured network. Appl. Math. Comput. 2018, 333, 194–212. [Google Scholar] [CrossRef]
- Ma, J.; Mi, L.; Zhou, P.; Xu, Y.; Hayat, T. Phase synchronization between two neurons induced by coupling of electromagnetic field. Appl. Math. Comput. 2017, 307, 321–328. [Google Scholar] [CrossRef]
- Andreev, A.V.; Frolov, N.S.; Pisarchik, A.N.; Hramov, A.E. Chimera state in complex networks of bistable Hodgkin-Huxley neurons. Phys. Rev. E 2019, 100, 022224. [Google Scholar] [CrossRef]
- Semenov, D.M.; Fradkov, A.L. Adaptive synchronization in the complex heterogeneous networks of Hindmarsh–Rose neurons. Chaos Solitons Fractals 2021, 150, 111170. [Google Scholar] [CrossRef]
- Ma, Z.C.; Wu, J.; Sun, Y.Z. Adaptive finite-time generalized outer synchronization between two different dimensional chaotic systems with noise perturbation. Kybernetika 2017, 53, 838–852. [Google Scholar] [CrossRef][Green Version]
- Zhang, J.; Wang, C.; Wang, M.; Huang, S. Firing patterns transition induced by system size in coupled Hindmarsh–Rose neural system. Neurocomputing 2011, 74, 2961–2966. [Google Scholar] [CrossRef]
- Plotnikov, S.A. Controlled synchronization in two FitzHugh-Nagumo systems with slowly-varying delays. Cybern. Phys. 2015, 4, 21–25. [Google Scholar]
- Plotnikov, S.A.; Lehnert, J.; Fradkov, A.L.; Schöll, E. Adaptive Control of Synchronization in Delay-Coupled Heterogeneous Networks of FitzHugh–Nagumo Nodes. Int. J. Bifurc. Chaos 2016, 26, 1650058. [Google Scholar] [CrossRef]
- Plotnikov, S.A.; Fradkov, A.L. Desynchronization control of FitzHugh-Nagumo networks with random topology. IFAC-PapersOnLine 2019, 52, 640–645. [Google Scholar] [CrossRef]
- Djeundam, S.D.; Filatrella, G.; Yamapi, R. Desynchronization effects of a current-driven noisy Hindmarsh–Rose neural network. Chaos Solitons Fractals 2018, 115, 204–211. [Google Scholar] [CrossRef]
- Rehák, B.; Lynnyk, V. Synchronization of nonlinear complex networks with input delays and minimum-phase zero dynamics. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 15–18 October 2019; pp. 759–764. [Google Scholar]
- Rehák, B.; Lynnyk, V.; Čelikovský, S. Consensus of homogeneous nonlinear minimum-phase multi-agent systems. IFAC-PapersOnLine 2018, 51, 223–228. [Google Scholar] [CrossRef]
- Rehák, B.; Lynnyk, V. Synchronization of a network composed of Hindmarsh-Rose neurons with stochastic disturbances. In Proceedings of the 6th IFAC Hybrid Conference on Analysis and Control of Chaotic Systems (Chaos 2021), Catania, Italy, 27–29 September 2021. [Google Scholar]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Song, Q.; Liu, F.; Cao, J.; Yu, W. Pinning-Controllability Analysis of Complex Networks: An M-Matrix Approach. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2692–2701. [Google Scholar] [CrossRef]
- Song, Q.; Liu, F.; Cao, J.; Yu, W. M-Matrix Strategies for Pinning-Controlled Leader-Following Consensus in Multiagent Systems With Nonlinear Dynamics. IEEE Trans. Cybern. 2013, 43, 1688–1697. [Google Scholar] [CrossRef] [PubMed]
- Khalil, H. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Huang, L.; Deng, F. Razumikhin-type theorems on stability of stochastic retarded systems. Int. J. Syst. Sci. 2009, 40, 73–80. [Google Scholar] [CrossRef]
- Zhou, B.; Luo, W. Improved Razumikhin and Krasovskii stability criteria for time-varying stochastic time-delay systems. Automatica 2018, 89, 382–391. [Google Scholar] [CrossRef]
- Peng, C.; Tian, Y.C. Networked Hinf control of linear systems with state quantization. Inf. Sci. 2007, 177, 5763–5774. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rehák, B.; Lynnyk, V. Synchronization of a Network Composed of Stochastic Hindmarsh–Rose Neurons. Mathematics 2021, 9, 2625. https://doi.org/10.3390/math9202625
Rehák B, Lynnyk V. Synchronization of a Network Composed of Stochastic Hindmarsh–Rose Neurons. Mathematics. 2021; 9(20):2625. https://doi.org/10.3390/math9202625
Chicago/Turabian StyleRehák, Branislav, and Volodymyr Lynnyk. 2021. "Synchronization of a Network Composed of Stochastic Hindmarsh–Rose Neurons" Mathematics 9, no. 20: 2625. https://doi.org/10.3390/math9202625
APA StyleRehák, B., & Lynnyk, V. (2021). Synchronization of a Network Composed of Stochastic Hindmarsh–Rose Neurons. Mathematics, 9(20), 2625. https://doi.org/10.3390/math9202625