
Computer Simulations of Dynamic Response of Ferrofluids on an Alternating Magnetic Field with High Amplitude

 , , ,
, , ,  and
and 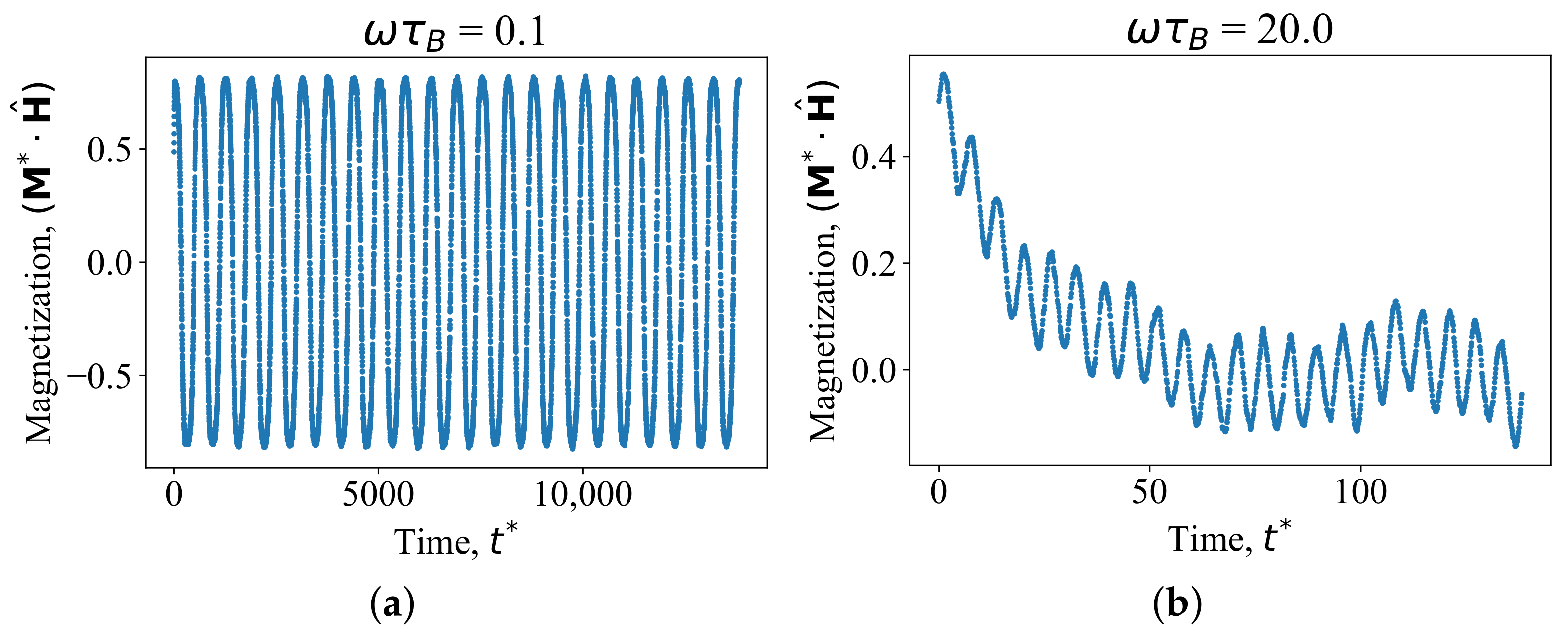{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model and Methods
2.1. Model
2.2. Simulation Details
2.3. Theory
3. Results and Discussion
- 1.
- The Langevin dynamics equations should be solved until the time moment that corresponds to at least 22 periods of the AC magnetic field. Obtained dynamic magnetization should be averaged over all calculated periods, excluding at least the first four ones.
- 2.
- It is necessary to use different time steps in different frequency ranges: if , if , if .
- 3.
- The step size has to be the same order as —for example, .
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| WCA | Weeks–Chandler–Andersen |
| LJ | Lennard–Jones |
| AC | Alternating current |
| N | The number of spherical particles |
| m | A mass of particles |
| V | A system volume |
| T | A temperature |
| A permanent point dipole moment of the particle | |
| A length of a point dipole moment vector | |
| A unit vector of a point dipole moment | |
| The Weeks–Chandler–Andersen (WCA) potential | |
| The long-range dipolar potential | |
| A distance between and ferroparticles | |
| The minimum of the Lennard–Jones (LJ) potential | |
| The Lennard–Jones energy | |
| The Lennard–Jones range parameter | |
| A unit vector of the interparticle separation vector | |
| An interparticle separation vector | |
| The vacuum magnetic permeability | |
| The Zeeman energy | |
| The magnetic field | |
| A unit vector of the magnetic field | |
| t | Time |
| H | The alternating field amplitude |
| The alternating field angular frequency | |
| The reduced concentration | |
| A numerical concentration | |
| The reduced magnetic moment | |
| The reduced temperature | |
| The Boltzmann constant | |
| The dipolar coupling constant | |
| The reduced time | |
| The units for time | |
| I | The particle moment of inertia |
| The particle translational velocity | |
| The particle angular velocity | |
| The Lennard–Jones force | |
| The dipole–dipole interaction force | |
| The translational friction constant | |
| The rotational friction constant | |
| The Gaussian distributed random force for the particle | |
| The Gaussian distributed random torque for the particle | |
| The Cartesian coordinate of the Gaussian distributed | |
| random force for the particle | |
| The Cartesian coordinate of the Gaussian distributed | |
| random torque for the particle | |
| s | The time moment |
| The reduced translational velocity of the particle | |
| The reduced force of the particle | |
| The reduced translational friction constant | |
| The reduced Gaussian distributed random force for the particle | |
| The reduced particle moment of inertia | |
| The reduced angular velocity of the particle | |
| The reduced torque of the particle | |
| The reduced rotational friction constant | |
| The reduced Gaussian distributed random torque for the particle | |
| The inertial time | |
| The Brownian time | |
| The reduced normalized magnetization | |
| The average value of the magnetization in the direction of the field | |
| Dynamic susceptibility | |
| The real part of the dynamic susceptibility | |
| The imaginary part of the dynamic susceptibility | |
| The Langevin susceptibility | |
| The Langevin parameter, the amplitude of the alternating magnetic field | |
| The susceptibility in the quasistatic case | |
| The effective relaxation time | |
| The frequency at which the imaginary part of the dynamic susceptibility | |
| has a peak | |
| The factor | |
| The time step in the computer simulations | |
| , | Different time steps in the computer simulations |
| The time points in the computer simulations | |
| The time step for calculating integral (9) | |
| The time points for calculating integral (9) | |
| K | The number of segments for calculating integral (9) |
| S | The aspect ratio between sets of points and |
References
- Wu, S.; Hu, W.; Ze, Q.; Sitti, M.; Zhao, R. Multifunctional magnetic soft composites: A review. Multifunct. Mater. 2020, 3, 042003. [Google Scholar] [CrossRef]
- Menzel, A.M. Tuned, driven, and active soft matter. Phys. Rep. 2015, 554, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Arain, M.B.; Bhatti, M.M.; Zeeshan, A.; Alzahrani, F.S. Bioconvection Reiner-Rivlin Nanofluid Flow between Rotating Circular Plates with Induced Magnetic Effects, Activation Energy and Squeezing Phenomena. Mathematics 2021, 9, 2139. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Yu, Y.; Zhao, Y. Flexible Ferrofluids: Design and Applications. Adv. Mater. 2019, 31, 1903497. [Google Scholar] [CrossRef] [PubMed]
- Pankhurst, Q.; Thanh, N.; Jones, S.; Dobson, J. Progress in applications of magnetic nanoparticles in biomedicine. J. Phys. D Appl. Phys. 2009, 42, 224001. [Google Scholar] [CrossRef] [Green Version]
- Dutz, S.; Buske, N.; Landers, J.; Gräfe, C.; Wende, H.; Clement, J. Biocompatible magnetic fluids of co-doped iron oxide nanoparticles with tunable magnetic properties. Nanomaterials 2020, 10, 1019. [Google Scholar] [CrossRef] [PubMed]
- Dutz, S.; Hergt, R. Magnetic nanoparticle heating and heat transfer on a microscale: Basic principles, realities and physical limitations of hyperthermia for tumour therapy. Int. J. Hyperth. 2013, 29, 790–800. [Google Scholar] [CrossRef] [PubMed]
- Gopika, M.; Lahiri, B.; Anju, B.; Philip, J.; Savitha Pillai, S. Magnetic hyperthermia studies in magnetite ferrofluids based on bio-friendly oils extracted from Calophyllum inophyllum, Brassica juncea, Ricinus communis and Madhuca longifolia. J. Magn. Magn. Mater. 2021, 537, 168134. [Google Scholar] [CrossRef]
- Lahiri, B.; Ranoo, S.; Muthukumaran, T.; Philip, J. Magnetic hyperthermia in water based ferrofluids: Effects of initial susceptibility and size polydispersity on heating efficiency. AIP Conf. Proc. 2018, 1942, 040019. [Google Scholar]
- Gleich, B.; Weizenecker, J. Tomographic imaging using the nonlinear response of magnetic particles. Nature 2005, 435, 1214–1217. [Google Scholar] [CrossRef]
- Dieckhoff, J.; Kaul, M.; Mummert, T.; Jung, C.; Salamon, J.; Adam, G.; Knopp, T.; Ludwig, F.; Balceris, C.; Ittrich, H. In vivo liver visualizations with magnetic particle imaging based on the calibration measurement approach. Phys. Med. Biol. 2017, 62, 3470–3482. [Google Scholar] [CrossRef]
- Salamon, J.; Dieckhoff, J.; Kaul, M.; Jung, C.; Adam, G.; Möddel, M.; Knopp, T.; Draack, S.; Ludwig, F.; Ittrich, H. Visualization of spatial and temporal temperature distributions with magnetic particle imaging for liver tumor ablation therapy. Sci. Rep. 2020, 10, 7480. [Google Scholar] [CrossRef] [PubMed]
- Raikher, Y.L.; Shliomis, M.I. The effective field method in the orientational kinetics of magnetic fluids. Adv. Chem. Phys. 1994, 87, 595–751. [Google Scholar]
- Fock, J.; Balceris, C.; Costo, R.; Zeng, L.; Ludwig, F.; Hansen, M. Field-dependent dynamic responses from dilute magnetic nanoparticle dispersions. Nanoscale 2018, 10, 2052–2066. [Google Scholar] [CrossRef] [Green Version]
- Debye, P. Polar Molecules; Chemical Catalog Company: New York, NY, USA, 1929. [Google Scholar]
- Fröhlich, H. Theory of Dielectrics: Dielectric Constant and Dielectric Loss; Clarendon Press: Oxford, UK, 1987. [Google Scholar]
- Yoshida, T.; Enpuku, K. Simulation and quantitative clarification of AC susceptibility of magnetic fluid in nonlinear Brownian relaxation region. Jpn. J. Appl. Phys. 2009, 48, 127002. [Google Scholar] [CrossRef]
- Coffey, W.T.; Kalmykov, Y.P.; Wei, N. Nonlinear normal and anomalous response of non-interacting electric and magnetic dipoles subjected to strong AC and DC bias fields. Nonlinear Dyn. 2015, 80, 1861–1867. [Google Scholar] [CrossRef]
- Raikher, Y.; Stepanov, V. Power losses in a suspension of magnetic dipoles under a rotating field. Phys. Rev. E 2011, 83, 021401. [Google Scholar] [CrossRef]
- Djardin, P.; Kalmykov, Y.; Kashevsky, B.; El Mrabti, H.; Poperechny, I.; Raikher, Y.; Titov, S. Effect of a dc bias field on the dynamic hysteresis of single-domain ferromagnetic particles. J. Appl. Phys. 2010, 107, 073914. [Google Scholar] [CrossRef]
- Batrudinov, T.; Ambarov, A.; Elfimova, E.; Zverev, V.; Ivanov, A. Theoretical study of the dynamic magnetic response of ferrofluid to static and alternating magnetic fields. J. Magn. Magn. Mater. 2017, 431, 180–183. [Google Scholar] [CrossRef]
- Lebedev, A.; Stepanov, V.; Kuznetsov, A.; Ivanov, A.; Pshenichnikov, A. Dynamic susceptibility of a concentrated ferrofluid: The role of interparticle interactions. Phys. Rev. E 2019, 100, 032605. [Google Scholar] [CrossRef]
- Lebedev, A.; Kantorovich, S.; Ivanov, A.; Arefyev, I.; Pshenichnikov, A. Weakening of magnetic response experimentally observed for ferrofluids with strongly interacting magnetic nanoparticles. J. Mol. Liq. 2019, 277, 762–768. [Google Scholar] [CrossRef]
- Ivanov, A.O.; Zverev, V.S.; Kantorovich, S.S. Revealing the signature of dipolar interactions in dynamic spectra of polydisperse magnetic nanoparticles. Soft Matter 2016, 12, 3507–3513. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ivanov, A.; Camp, P. Theory of the dynamic magnetic susceptibility of ferrofluids. Phys. Rev. E 2018, 98, 050602. [Google Scholar] [CrossRef] [Green Version]
- Berkov, D.V.; Iskakova, L.Y.; Zubarev, A.Y. Theoretical study of the magnetization dynamics of nondilute ferrofluids. Phys. Rev. E 2009, 79, 021407. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rusanov, M.; Zverev, V.; Elfimova, E. Dynamic magnetic susceptibility of a ferrofuid: The influence of interparticle interactions and AC field amplitude. Phys. Rev. E 2021, 104, 044604. [Google Scholar] [CrossRef]
- Hansen, J.; McDonald, I. Theory of Simple Liquids, 3rd ed.; Academic Press: Burlington, MA, USA, 2006. [Google Scholar]
- Batrudinov, T.; Nekhoroshkova, Y.; Paramonov, E.; Zverev, V.; Elfimova, E.; Ivanov, A.; Camp, P. Dynamic magnetic response of a ferrofluid in a static uniform magnetic field. Phys. Rev. E 2018, 98, 052602. [Google Scholar] [CrossRef] [Green Version]
- Sindt, J.O.; Camp, P.J.; Kantorovich, S.S.; Elfimova, E.A.; Ivanov, A.O. Influence of dipolar interactions on the magnetic susceptibility spectra of ferrofluids. Phys. Rev. E 2016, 93, 063117. [Google Scholar] [CrossRef] [Green Version]
- Allen, M.P.; Tildesley, D.J. Computer Simulation of Liquids; Clarendon Press: Oxford, UK, 1987. [Google Scholar]
- Tuckerman, M.; Berne, B.J.; Martyna, G.J. Reversible multiple time scale molecular dynamics. J. Chem. Phys. 1992, 97, 1990–2001. [Google Scholar] [CrossRef] [Green Version]
- Omelyan, I. Numerical integration of the equations of motion for rigid polyatomics: The matrix method. Comput. Phys. Commun. 1998, 109, 171–183. [Google Scholar] [CrossRef] [Green Version]
- Martys, N.S.; Mountain, R.D. Velocity Verlet algorithm for dissipative-particle-dynamics-based models of suspensions. Phys. Rev. E 1999, 59, 3733–3736. [Google Scholar] [CrossRef]
- Weik, F.; Weeber, R.; Szuttor, K.; Breitsprecher, K.; de Graaf, J.; Kuron, M.; Landsgesell, J.; Menke, H.; Sean, D.; Holm, C. ESPResSo 4.0—An extensible software package for simulating soft matter systems. Eur. Phys. J. Spec. Top. 2019, 227, 1789–1816. [Google Scholar] [CrossRef] [Green Version]
- Cerda, J.J.; Ballenegger, V.; Lenz, O.; Holm, C. P3M algorithm for dipolar interactions. J. Chem. Phys. 2008, 129, 234104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, J.W.F. Thermal Fluctuations of a Single-Domain Particle. Phys. Rev. 1963, 130, 1677–1686. [Google Scholar] [CrossRef]
- Kalambet, Y.; Kozmin, Y.; Samokhin, A. Comparison of integration rules in the case of very narrow chromatographic peaks. Chemom. Intell. Lab. Syst. 2018, 179, 22–30. [Google Scholar] [CrossRef]
- Dieckhoff, J.; Eberbeck, D.; Schilling, M.; Ludwig, F. Magnetic-field dependence of Brownian and Néel relaxation times. J. Appl. Phys. 2016, 119, 043903. [Google Scholar] [CrossRef]
- Ambarov, A.V.; Zverev, V.S.; Elfimova, E.A. Numerical modeling of the magnetic response of interacting superparamagnetic particles to an ac field with arbitrary amplitude. Model. Simul. Mater. Sci. Eng. 2020, 28, 085009. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zverev, V.; Dobroserdova, A.; Kuznetsov, A.; Ivanov, A.; Elfimova, E. Computer Simulations of Dynamic Response of Ferrofluids on an Alternating Magnetic Field with High Amplitude. Mathematics 2021, 9, 2581. https://doi.org/10.3390/math9202581
Zverev V, Dobroserdova A, Kuznetsov A, Ivanov A, Elfimova E. Computer Simulations of Dynamic Response of Ferrofluids on an Alternating Magnetic Field with High Amplitude. Mathematics. 2021; 9(20):2581. https://doi.org/10.3390/math9202581
Chicago/Turabian StyleZverev, Vladimir, Alla Dobroserdova, Andrey Kuznetsov, Alexey Ivanov, and Ekaterina Elfimova. 2021. "Computer Simulations of Dynamic Response of Ferrofluids on an Alternating Magnetic Field with High Amplitude" Mathematics 9, no. 20: 2581. https://doi.org/10.3390/math9202581
APA StyleZverev, V., Dobroserdova, A., Kuznetsov, A., Ivanov, A., & Elfimova, E. (2021). Computer Simulations of Dynamic Response of Ferrofluids on an Alternating Magnetic Field with High Amplitude. Mathematics, 9(20), 2581. https://doi.org/10.3390/math9202581