1. Introduction
It is well known that the use of a group formed by two or more agents, which work all together in order to carry out a common objective, provides several advantages compared to those cases in which only a single agent is under consideration. Thus, systems with two or more agents (from now on termed as multi-agent systems) can perform tasks or missions either faster or in a more flexible way than systems with a single agent. Moreover, they are more robust. Making a profit of these systems implies that several issues must be faced up, such as task decomposition, task assignment or movement coordination. This paper focuses on the “Multi-agent Task Allocation” (MATA for short) problem which is selecting the best agent, as for instance robots or any intelligence entity, to execute each of the tasks that must be performed. In order to make this decision, the system must take into account several factors or movement restrictions. Thus, the agents have a series of characteristics that limit which tasks can be reached and carried out. When we deal with real physical agents, an example of these restrictions is given by the energy limitation. Since we focus on treating the system from an abstract approach this paper could be useful to describe many kinds of agents with movement restrictions such as robots, airplanes, tourists, insects and so on.
Nowadays, several methods have been proposed for addressing the MATA problem [
1,
2]. The so-called Swarm Intelligence methods are one of the most widely used in the literature (see, for instance, [
3]). These are inspired by the behaviour of colonies of insects, like for example colonies of ants or bees, where a cooperative and intelligence pattern emerges from the interaction of very simple behaviours [
4]. Scalability, simplicity or robustness are some of the main advantages that swarm intelligence provides compared to other paradigms. Response-threshold methods (RTM for short), introduced by G. Theraulaz et al. in [
5], are the most commonly used swarm-like methods [
6,
7]. The classical RTM assigns a value to each agent and to each task. Such a value is called stimulus and it can be interpreted as an adequacy level of the task under consideration from the point of view of the agent. For example, the stimulus can be the inverse of the distance between the task and the agent. An agent decides to perform a task according to a probability function, called response function, that depends on the stimulus and on a parameter of the system known as threshold. When the task decision making only depends on the current task being performed, the evolution of the system can be modelled as memoryless process, i.e., as a probabilistic Markov chain.
The Markovian probabilistic approach has several well known disadvantages. Concretely, the response functions (transition probabilities) must meet the axioms of probability, i.e., the probability of moving from one task to the others must be a probability distribution. However, in real missions this constraint is not satisfied in general. Besides, when the system admits an equilibrium (stationary distribution of probability), the convergence is asymptotic. Of course, such a characteristic is not too much useful when a working decision must be made on-line in real missions. These facts make that the probability approach and, thus, the probabilistic response functions, could not be appropriate as a theoretical foundation for the task allocation problem. From a practical point of view, the convergence of the Markov chain must make possible to predict the behaviour of the system over time and, therefore, allows to make suitable decisions.
In [
8], a new theoretical formalism for a RTM was proposed based on possibility theory in the sense of [
9]. Hence the RTM was implemented considering transition possibilities instead of transition probabilities and, therefore, both possibilistic transition functions and possibilistic Markov chains (also known as fuzzy Markov chains) instead of the classical probabilistic ones. We refer the reader to [
10] for the basics about fuzzy Markov chains. Furthermore, in [
11], it was proved the suitability of indistinguishability operators as mathematical toolto model possibilistic response functions (see [
12] for a detailed treatment of indistinguishability operators). Thanks to indistinguishability operators, a formal method to generate possibilistic response functions was introduced in the same reference. Moreover, those response functions known in the literature were retrieved as a particular case of such a methodology. The aforesaid method was applied to generate possibilistic response functions as indistinguishability operators obtained from, on the one hand, the family of
t-norms due to Dombi and, on the other hand, from the family of
t-norms due to Aczél and Alsina. A large number of experiments validated the utility of the generated response functions and, thus, the use of indistinguishability operators to simulate the allocation of a set of tasks in a multi-agent system.
All indistinguishability operators considered in [
11] present a common characteristic, which is that they always take values strictly greater than zero. Since an indistinguishability operator is identified with a response function which, at the same time, provides the possibility transition, the fact that it takes values strictly greater than zero can be interpreted as follows: an agent is always able to transit from its current state (or task) to any other one. Nevertheless, there are cases in which this assumption is not fulfilled and, therefore, the transition possibility between two tasks may be null. For example, in multi-robot systems, each robot has a limited amount of energy (batteries capacity) for executing the mission which limits its movements. Of course, when the energy level is below the energy necessary for a robot to move from one task to another one, then the transition possibility should be zero.
In the light of the exposed inconvenient, this paper proposes a new type of response function that takes the zero value when, due to its restrictions, an agent is not able to carry out a specific task. It will be proved that the new response functions, from now on called Yager Possibilitic Response Functions (YPRFs for short), are an indistinguishability operator obtained from the family of
t-norms due to Yager. These new indistinguishability operators will be applied, as possibility transition functions, to allocate tasks in a RTM multi-agent system with fuzzy Markov chains. In order to validate our approach several simulations will be performed using Matlab in such a way that the agents must carry out an inspection-like mission, where the agents must visit a set of points located in the space. These points are randomly placed in the environment or arranged in clusters or groups. Once an agent has reached a task it must decide the next one to visit following a fuzzy Markov chain. Due to their restrictions, as for instance energy limitations, some agents will not be able to execute tasks placed far away from its initial location. As will be explained later (see
Section 4.1), there are several real situations that fit this generic task description. The results about the system’s behaviour that will be obtained using YPRFs will be compared with the system’s behaviour that can be obtained when the Original Possibilitic Response Functions (OPRFs for short) are applied. The experimental results will be used to show that the systems which involve the classical response functions (OPRFs) exhibit a very unnatural behavior, from the restrictions viewpoint, specially when the tasks are clustered in groups. In contrast, the YPRFs, proposed in this paper, are an excellent candidate to model the transitions when agent’s restrictions are under consideration in the aforementioned scenarios. Moreover, in all cases, we will show that fuzzy Markov chains outperform their probabilistic counterparts in the spirit of [
11]. Thus, to our best knowledge, this paper states for the first time that indistinguishability operators are an appropriate mathematical tool to deal with the agents restrictions in task allocation problems, and shows how the modelling based on their use and fuzzy Markov chains outperform the classical swarm-like approaches. It must be stressed that the objective of this paper is to show that YPRFs are useful to model a generic multi-agent system with restrictions, without taking into account the specific characteristics of the agents except their limitations. Notice that we have included in the description of our system neither any model of a concrete agent nor of its limitations (see
Section 2). Observe that the information about the aforementioned limitations are included, in a generic sense, in agent’s stimulus. So our general approach should be adapted appropriately when specific agents are taken under consideration.
The remainder of the paper is organized as follows:
Section 2 reviews the main concepts on Swarm Intelligence, Response Threshold Methods and Fuzzy Markov Chains. Moreover, we recall the main aspects on indistinguishability operators that are necessary in our study. In
Section 3, we introduce Yager Possibilitic Response Functions and we prove that these new response functions are exactly indistinguishability operators obtained from the family of Yager
t-norms. Then, in
Section 4, we explain a description of generic tasks that could fit with several real missions where the agents must visit a set of points located in the space. Moreover, the experimental framework and our simulation results are exposed. Finally,
Section 5 summarizes the conclusions of our work and our future work.
3. Yager Possibilitic Response Function as an Indistinguishability Operator
In the light of the aforesaid drawbacks of the OPRFs, in this section we will introduce the new aforementioned response function, referenced to as Yager Possibilitic Response Function (YPRF for short) and we will prove that it can be modelled as an indistinguishability operator. To this end, given two tasks
and
, denote the Euclidean distance
by
. Taking this into account, consider the transition between the current task
and the next one
provided by:
where
is the response threshold associated to the an agent
. It must be stressed that, fixed
i, the values
fulfil the axiomatics of a possibility distribution in the sense of [
9]. Clearly, such values do not satisfy the axiomatics of a probability distribution. Moreover, notice that when the distance between the tasks is greater than
the value
is exactly 0. Thus,
allows us to model agent restrictions that cannot be considered when indistinguishability operators
and
are considered. For example, for a multi-robot system, the parameter
can model the robots’ energy levels, that restricts the targets that a robot is able to reach. Furthermore, the value
increases when the distance
decreases. In this sense, the values
can be understood as a transition possibility function. Therefore, fixed a threshold
and given two tasks
and
, we define the Yager Possibilitic Response Function
as follows:
where
x and
y denotes the coordinates of the allocations
and
, respectively.
Next we prove that the YPRF is exactly an indistinguishability operator. To this end, let us recall the Yager family of
t-norms (see [
16]).
Let
. The function
given by:
is called the Yager
t-norm for the parameter
.
Now we are able to prove the result below which provides that the new response function is a -indistinguishability operator.
Theorem 2. Set and . If is a metric space, then the fuzzy set is a -indistinguisahbility operator for , wherefor all . Proof. Obviously, we have that and that for all . Next we show that is satisfied for all .
Let . We distinguish two cases:
Case 1. Suppose that
. Then,
If
, then
. Thus,
Otherwise
and
. Then,
and
So, since
we obtain that
Case 2. Suppose that . Then we have that .
As before, if
, then
. It follows that
Otherwise
and
. Then, on the one hand,
and
On the other hand, observe that
Therefore,
and so
Thus, is a -indistinguishability operator. □
In the light of the preceding result we obtain the next one.
Corollary 3. Set and . Then the fuzzy set is a -indistinguishability operator, wherefor all . Notice that if we implement a fuzzy Markov process according to the RTM algorithm as described in
Section 2.2 and involving the YPRF given by (7), then the possibilistic transition matrix fulfils all conditions in the statement of Theorem 1 and, hence, the convergence of the chain to a stationary possibilistic distribution is guaranteed in at most
steps, where
m is the number of tasks to be performed.
4. Experimental Results
In this section we will analyse the results of experiments carried out to test and validate the new YPRFs as transition possibility functions into a fuzzy Markov chain, which implements a response threshold method. We will study the number of steps needed to converge to a stationary possibilistic distribution. Moreover, we will study the adequacy of the YPRFs, given by (
7), to model the evolution of the system when agents’ limitations are taken into account. All the results are compared with those obtained through the use of OPRFs, that is when we use the indistinguishability operators
given by (
4). Besides all results are compared with those obtained via its probabilistic Markov chain counterpart. In order to make such a comparison we have applied the conversion possibilistic-to-probabilistic introduced in [
17]. A comparison of the results obtained when we use the YPRF indistinguishabilities with those obtained through the use of the indistinguishability operators
has not been made because, as we have exposed in
Section 3, the indistinguishability operators
and
provide very similar results.
4.1. Task Description
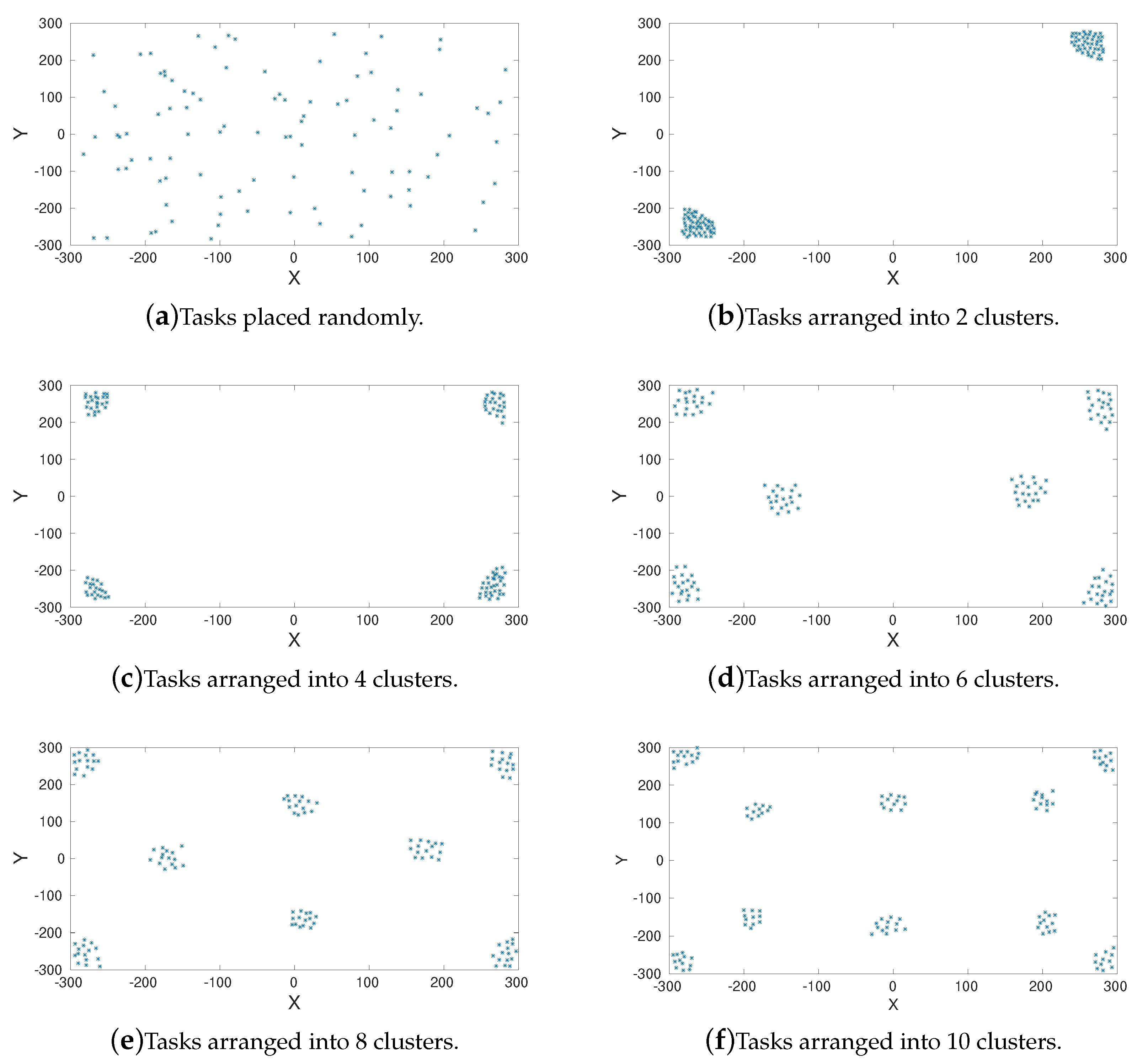
In order to validate our approach the agents must carry out an inspection-like mission where the agents must visit a set of points located in the space. These points are randomly placed in the environment or arranged in clusters or groups. Once an agent has reached a task, it must decide the next one to visit following a possibility/probability value provided by the YPRFs or ORPFs. Each agent has a set of constraints, such as the maximum displacement distance which is modelled by the threshold value.
There are several real situations that fit the aforementioned task description. An instance is given by those missions that can be considered as an inspection task that must be performed by a swarm of autonomous aerial or terrestrial robots, as was suggested in [
18]. Each cluster of points could be a neighborhood of a city and each of the cluster points belonging to the neighborhood can be considered as a building that must be inspected by the robots. In [
19], a set of aerial robots must perform a reconnaissance mission where the targets appear in form of clusters. It is not hard to see how this mission have a great interest to assist military missions [
20]. In [
21], the authors highlight how a set of robots can address the so-called “fog of war”. This is a very well known military term which describes the uncertainty in the battle such as positions of the enemies troops. For example, in an urban scenario, a set of robots could escort a convoy to inspect surrounding buildings for enemies. In this case each building would be one of the points and the aforementioned clusters of points would be the neighbourhoods of the city. It must be pointed out that, in order to address these kind of problems with a swarm of robots, the US Defence Advanced Research Projects Agency (DARPA) launched in 2016 the OFFSET-program (OFFensive Swarm-Enabled Tactics).
More examples of inspection and reconnaissance missions that could be addressed by our methods can be found in [
22,
23]. In these cases, a multi-robot system of autonomous surface and underwater vehicles must mitigate a flood disaster using auction-like methods and Petri Nets. The vehicles should, among other tasks, cover a certain environment collecting information. As in the previous military-task, in this case the tasks could be grouped in clusters or areas of interest that the robots must inspect. Moreover, there are a set of constraints that describes the validity of allocations of vehicles to tasks. Despite these systems make use of auction algorithms, instead of an swarm-like approach (see for example [
24,
25,
26]), the set of constraints is equivalent to the constraints provided by the threshold of YPRFs.
4.2. Experimental Framework
During the aforementioned inspection task each place to visit must be identified with the states of the system. When an agent arrives at a task, it must decide on the next task to be performed by following a Markov chain. We have considered both cases, i.e., the case in which the transition matrix is induced by the OPRF, and that in which such a matrix is induced by the YPRF. Moreover, their probabilist counterparts Markov chains have been simulated too.
The OPRF and YPRF have been considered, always with the power value
n equals 2. Several synthetic environments with different positions of the objects in the environment (placements of the tasks) have been considered and tested with MatlabThe source code is available at the following repository:
https://github.com/joseGuerreroUIB/MDPIMathematics2021.git.
Figure 1 represents these environments, where each blue dot is a task. As can be seen, the task are placed randomly (see
Figure 1a) or arranged into 2, 3, 6, 8 and 10 clusters. All the environments have the same dimensions: width = 600 units and high = 600 units. The threshold parameter,
, has the same value for each agent and it depends on the maximum distance between tasks as follows:
where
is the maximum distance between two points and
is a parameter of the system which allows us to modulate the tendency of the agent to leave a task. In our case
is equal to
units of distance and
. Recall that parameter
is the maximum distance that an agent is able to reach (see Equation (
6)). In Equation (
8),
value is divided by
in order to obtain the threshold, thus the parameter
nTH can be considered as the portion of the space reachable by an agent. For example, when
nTH = 1, the agents can reach all the tasks and they have no restrictions. When, for example,
nTH = 2 the agents only can reach half of the whole space.
4.3. Experiments with Randomly Placed Tasks
Firstly, we analyse the number of steps needed to converge to a stationary distribution using the OPRF and YPRF with both possibilistic and probabilistic Markov chains. Recall that, as was mentioned in
Section 2.2, the convergence to stationary distribution in a finite number of steps is not guaranteed for probabilistic Markov chains. Along the experiments we assume that if the convergence is not reached after 500 steps, then either the system does not converge or the required convergence time is long much with respect to the possibilistic case.
Table 1 shows the mean number of steps required to converge when the objects are placed randomly in the environment (see
Figure 1a). The probabilistic/possibilistic Markov chains for different values of the
parameter and for the OPRFs and YPRFs have been considered. Each experiment has been performed over 500 different randomly generated environments. The first column of the table shows the values of the parameter
. The second column shows the percentage of experiments that has converged when the probabilsitic Markov chain is considered. The number of steps required to converge, when the system converges, are shown in the third column. As can be seen, the percentage of convergence with an ORPF and a probabilistic Markov chain are very similar for all
values. In contrast, when a YPRF is considered the percentage of convergent experiments decreases and the number of steps to converge increases as the
increases. The 4th column shows the standard deviation of the number of steps for the probabilistic case. The 5th and the 6th columns of
Table 1 show, respectively, the percentage of simulations that converge and the number of steps need to converge to a stationary distribution in the possibilistic case. Finally, the last column shows the standard deviation for the number of steps needed to converge when the fuzzy Markov chains are under consideration. Obviously, the convergence of these chains is always guaranteed and, therefore, in all cases this percentage is
. The number of steps to converge depends on neither the parameter
nor the indistinguishability operator under consideration and, in addition, it is always equal to
steps. Note that this value is much lower than the number of steps needed by its probabilistic counterpart. Furthermore, as Duan’s theorem conditions (see Theorem 1) do not depend on the system parameter, the number of steps required to converge depends on the
parameter either. Finally, it must be point that the probabilistic Markov chains induced by a YRPF require a great number of steps to converge compared with its ORPF counterparts. The theoretical reason of this behaviour is still under research. It seems that a probabilistic matrix with many values equal zero increases the number of steps required to converge. In any case, Fuzzy Markov chains show a more robust behaviour and do not require a greater number of steps required to converge to a stable distribution.
4.4. Experiments with Tasks Arranged in Clusters
In this section we will discuss the experiments made when the tasks are distributed in clusters.
4.4.1. Convergence Analysis
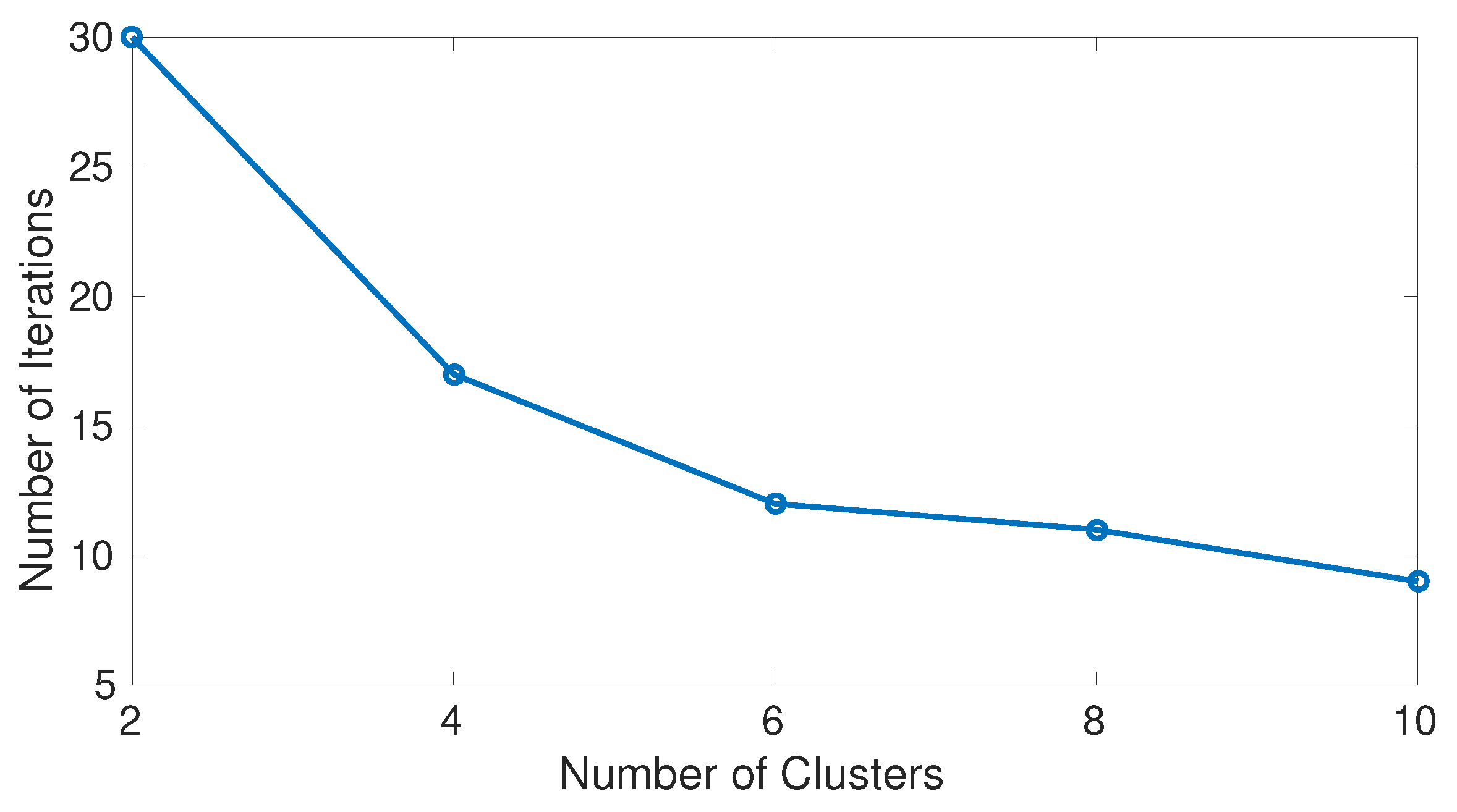
First of all we discuss the number of iterations needed to converge to a stable distribution.
Figure 2 shows the number of steps needed to converge to a stable possibility distribution. Such a number of steps depends on neither the
parameter nor the indistinguishability operator (ORPF or YRPF). Moreover, as can be seen, the greater number of cluster, the lower number of iterations to converge. The results for its probabilistic counterpart have not been collected in a table or figure because there is not convergence in general. When the YRPF is used and
, the induced Markov chain does not converge for any number of clusters (it requires more than 500 iterations). The experimental results show that after 500 iterations the convergence is never reachable. When the ORPF is under consideration and
, the resulting probabilistic Markov chain only converges for 4 and 10 clusters and requires 99 and 110 iterations respectively for all simulations. Similar results are obtained for other values of
.
In the following we study the impact of the threshold value (
) and the response function on the values of the resulting matrix obtained after iterating multiple times the transition matrix
P of the Markov chain for tasks arranged into clusters (see
Figure 1b–f). In order to simplify the visualization, each element of the transition matrix
is encoded with a color. Thus the whole matrix can be showed as an image where the lower the possibility, or probability, the darker the color. Moreover, the tasks in the matrix are grouped by clusters, so that, all the tasks of a cluster are placed in consecutive position of the matrix.
4.4.2. Probabilistic vs. Possibilistic
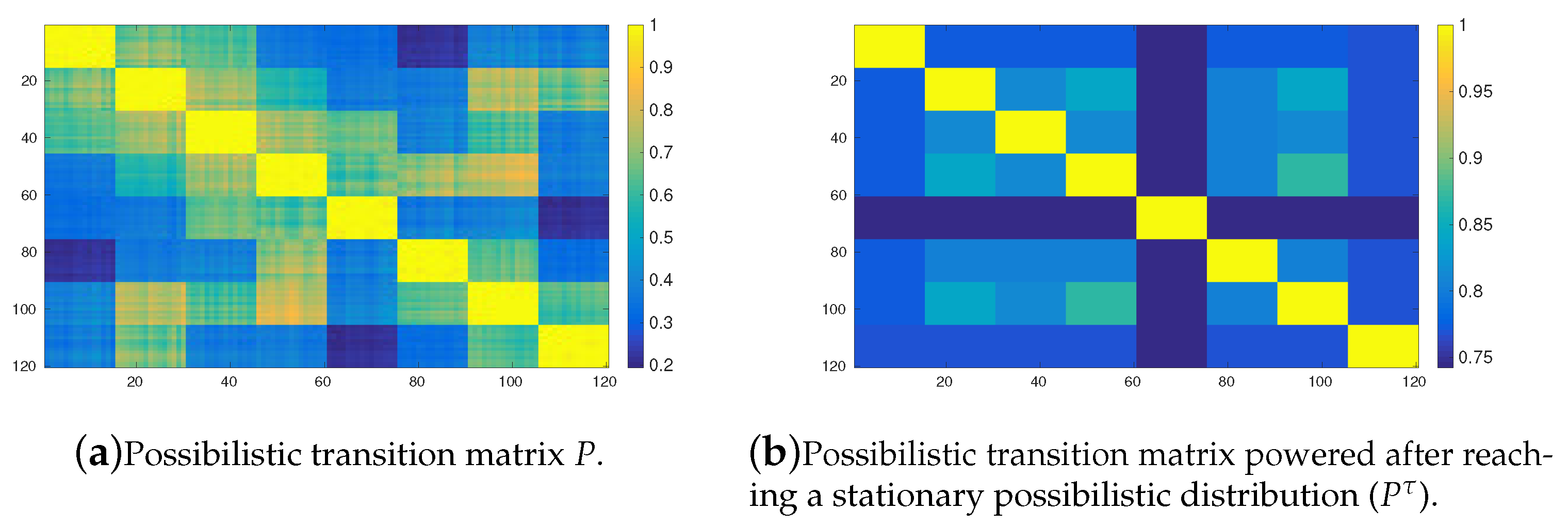
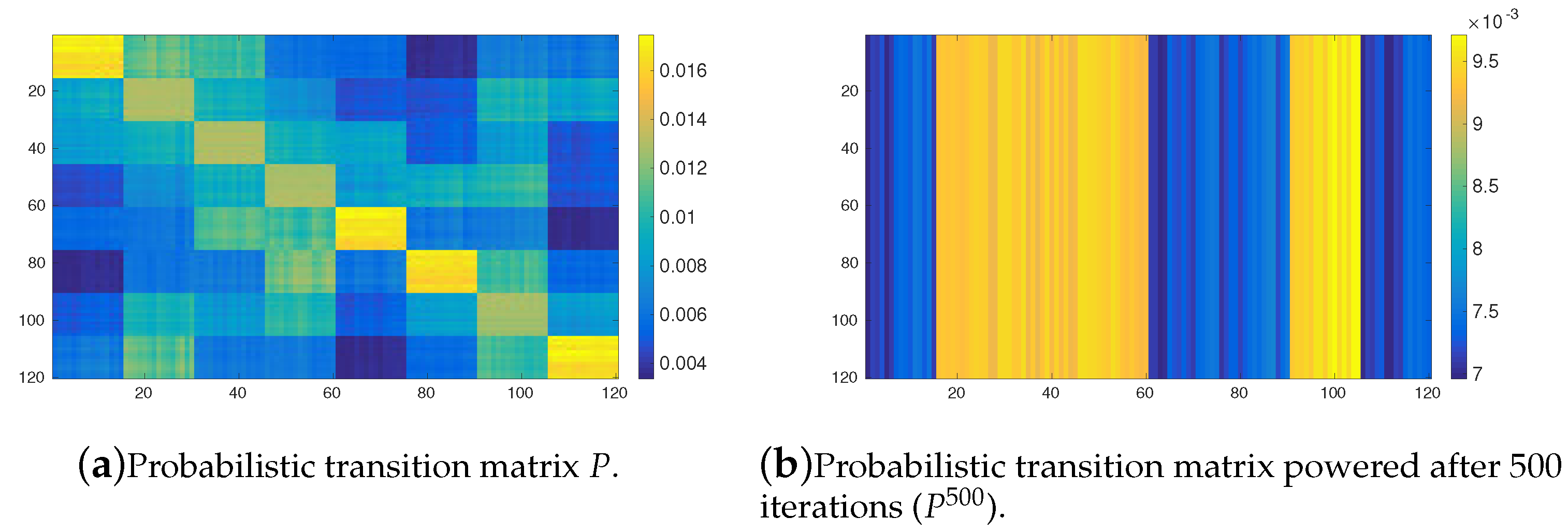
Figure 3a shows the transition matrix of the possibility Markov chain induced by the OPRF with 120 tasks clustered into 8 groups (see
Figure 1e) and
. The yellow colors represent possibilities close to 1, in contrast, dark blue ones are possibilities with zero value or close to zero.
Figure 3b shows the matrix after reaching a stationary possibilistic distribution, as was defined in
Section 2.2. Thus, this figure shows the values of the
such that
, and therefore if
is a stationary possibilistic distribution, then
, where ∘ stands for the matrix product in the max–min algebra. The
value stands for the number of iterations required to converge to a possibilistic stationary distribution.
Figure 2 shows the aforementioned value depending on the number of clusters. As can be seen, both figures clearly show the 8 clusters of tasks (yellow rectangles), very specially after reaching the stationary state (
Figure 3b). This means that, on the one hand, an agent which initially is assigned to a task in a given cluster has a very great possibility (equal or close to 1) of staying in the same cluster in the future. On the other hand, this agent has possibility close to 0, but greater than 0, of leaving its initial cluster.
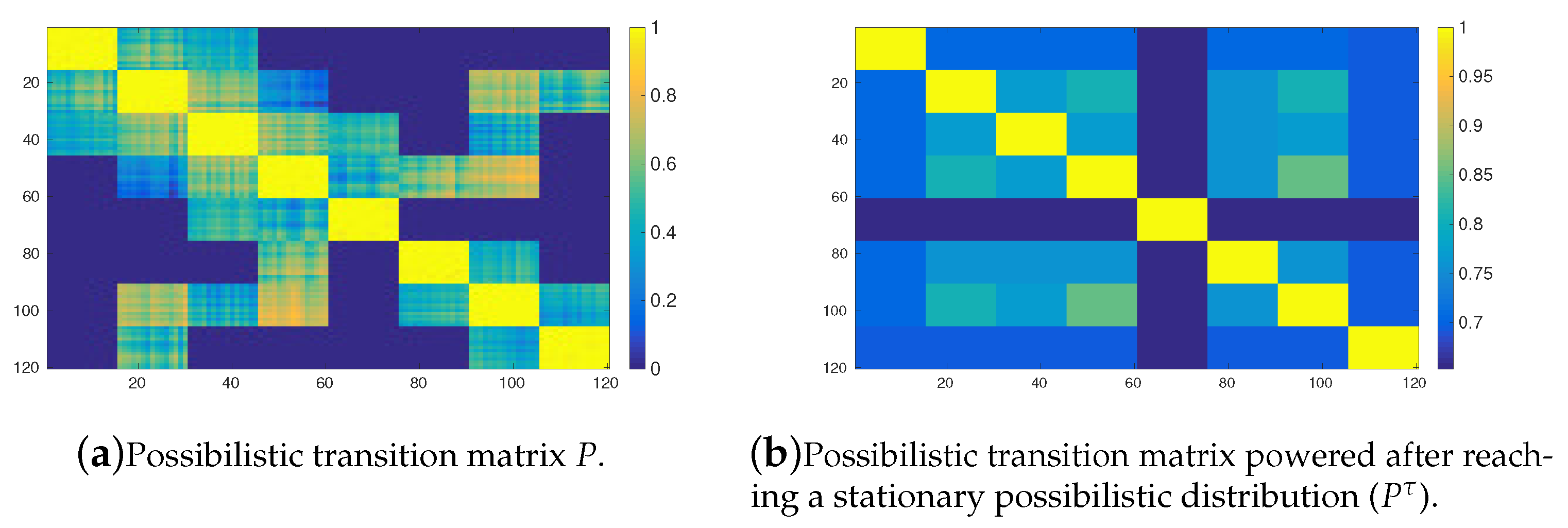
Figure 4 shows the corresponding matrices for the same environment (8 clusters of tasks) and threshold value (
) but now using the YPRF. As can be seen, the results are very similar to those obtained with the OPRF. So with a low value of
, agent’s behaviour does not depend on the response function, OPRF or YPRF, used to induce the transition matrix.
Moreover, as can be seen in
Figure 3a and subsequent, the tasks in the same cluster are colored in yellow tones, which means possibilistic values near to one. For example, the tasks near to the first cluster (top-right yellow square) have yellow-like colors which means high transition possibilities. From these light colors we can conclude that the tasks are very near. In contrast, the farther away the groups are from each other, the darker the colours of the figure (dark blue colours) are. Thus, if the tasks were far away from the first cluster, the colors would be darker.
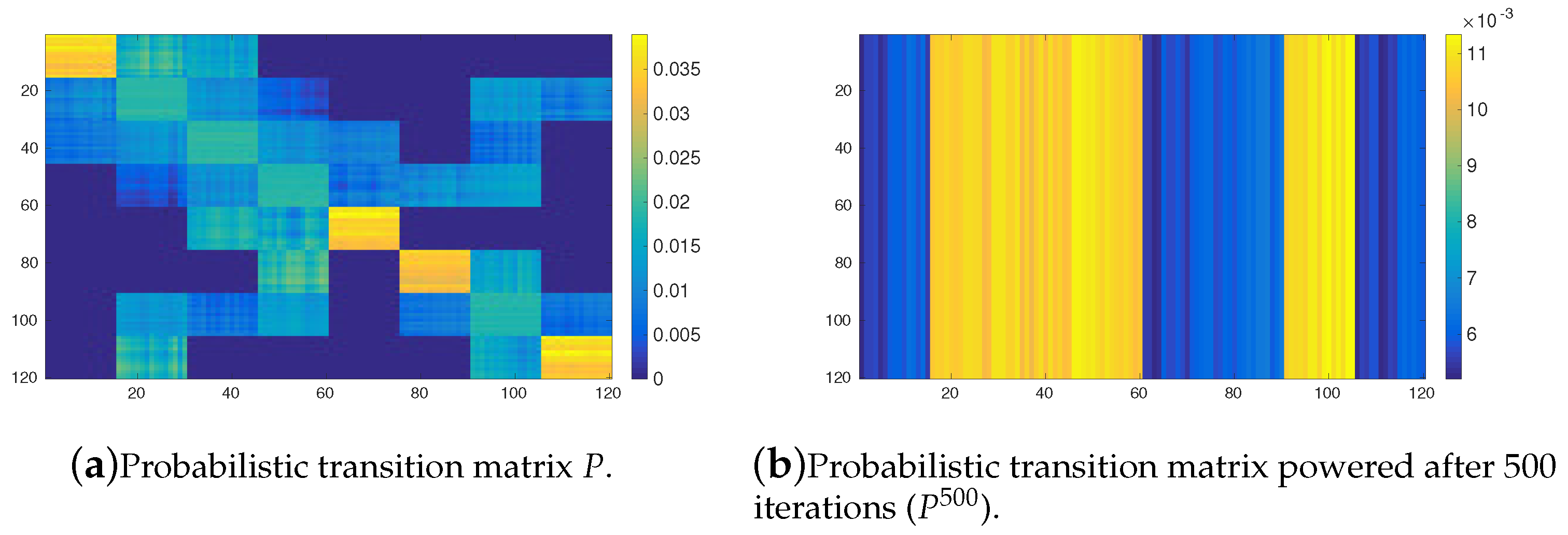
Figure 5 shows the probabilistic transition matrix induced from the OPRF with
and tasks arranged into 8 clusters. That is, this matrix is obtained after applying the possibilistic-to-probabilistic transformation (see
Section 4.3), to the possibilistic transition matrix shown in
Figure 3. Although the scale of the colors is different from the one used in the aforementioned possibilistic figure, the obtained conclusions are still valid. The transition matrix also has high values (yellow like colors) for tasks in the same cluster, similar to the probabilistic case.
Figure 5b shows the values of the matrix
after 500 iterations computed with the matrix product in the the sum-product algebra. It must be stressed that the probabilistic Markov chain does not converge to a stable probability distribution. Recall that we assume that if the system does not converge after 500 iterations, then the time taken exceeds too much, with respect to the possibilistic case, the required convergence time. Moreover, the general shape of the probabilistic transition matrix does not change after 500 iterations. So if the system has not converged after 500 iterations, then it will not converge in general. The differences with respect to its possibilistic counterpart (see
Figure 3b) are very remarkable. In the probabilistic case the agents has a very high possibility to leave its initial cluster and very low probobability to stay in it and, therefore, they cannot discriminate the groups of tasks. This behaviour seems very unnatural, specially when the agents have energy restrictions and keeping in mind the type of real missions exposed in
Section 4.1. These results using the YPRF are shown in
Figure 6. Furthermore, the values of transition probabilities between tasks belonging to the same cluster in the transition matrix are reduced if we compare them with those given in the case in which the OPRF is used (see
Figure 6a and compare
Figure 5a). The obtained matrix after 500 iterations (see
Figure 6b) shows that a very similar pattern to that obtained in the case of the OPRF arises when we use the YRPF. Similar results are obtained when different number of clusters are considered. So, in the light of these results, we can conclude that the probabilistic Markov chains induced from the OPRF and the YPRF with a low value of the
parameter exhibit unnatural behaviour and, therefore the probabilistic framework is not appropriate for allocating tasks when these type of environments are considered. Similar results has been obtained with higher values of the
parameter, as can be seen in
Figure 7. This figure shows the same results as
Figure 5 with
.
4.4.3. Impact of the Parameter
Next we analyse the impact of the
parameter on the behaviour of the system. On the one hand,
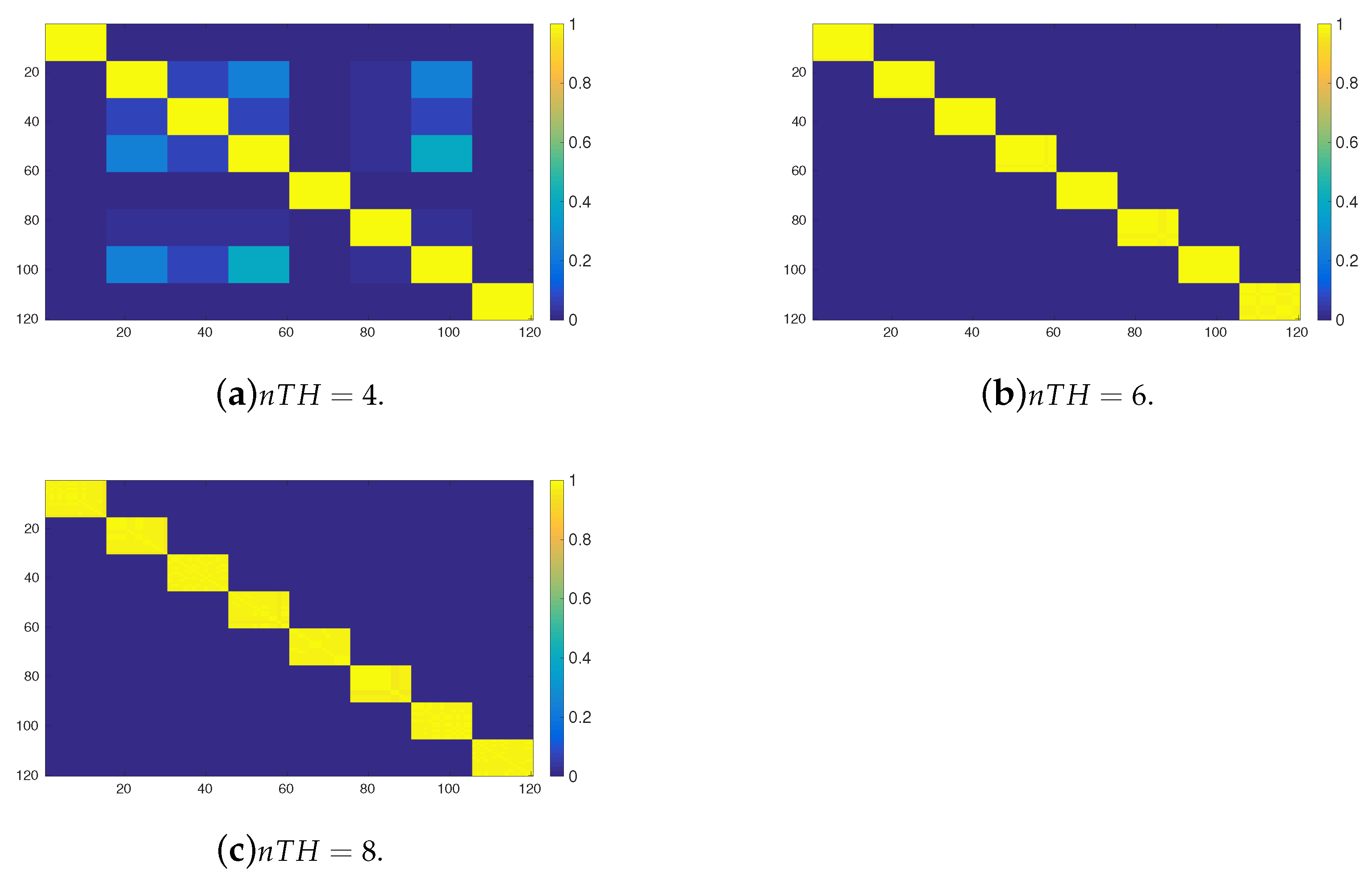
Figure 8 shows the possibilistic transition matrix powered after reaching a stationary possibilistic distribution
when the transitions are induced by means of the OPRF with 120 tasks arranged into 8 clusters for
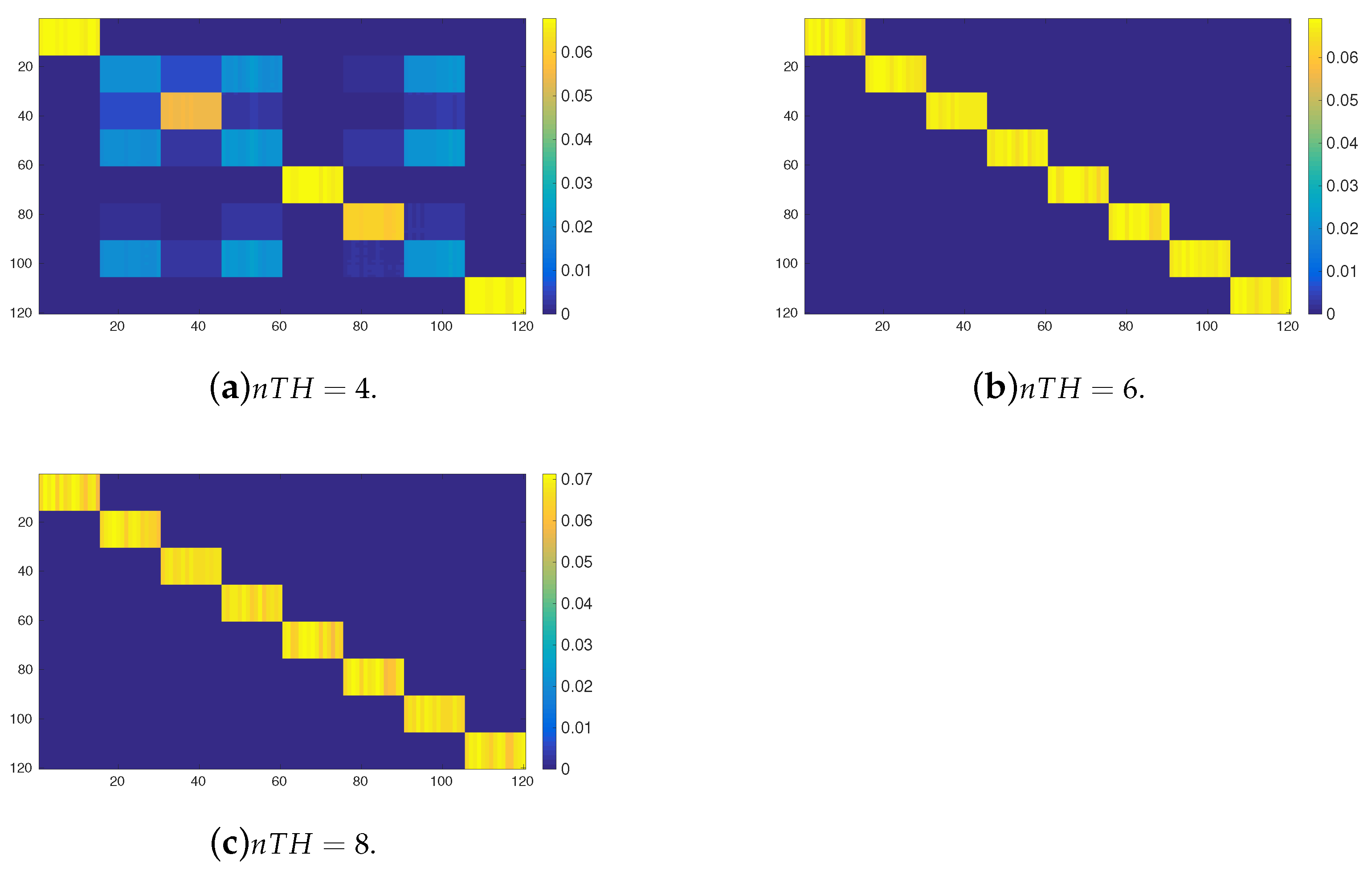
. On the other hand,
Figure 9 shows the same set of matrices but now induced by means of the YPRF. If both set of figures are compared, then it can be observed that the YPRF function is able to make a better discrimination of the 8 clusters than the OPRF. For example if
, then the aforementioned matrix induced by means of the YPRF remains unchanged and, hence, it is able to identify the 8 clusters of tasks (see
Figure 9b,c). In contrast, the grater the the value of parameter
, the grater the difference between possibilistic transitions induced through the OPRF and the YRPF. (see
Figure 8b,c. Moreover, it can be observed that this response function cannot discriminate totally the clusters and, therefore, it cannot guarantee that an agent with mobility restrictions does not move to an unreachable cluster of tasks.
Figure 10 shows the probabilistic transition matrices powered 500 times
obtained after applying the possibilistic-to-probabilistic transformation to the possibilistic transition matrices induced using the OPRF for 120 tasks clustered into 8 groups with
(see
Figure 8). As can be observed, the results are similar to those explained for
, and therefore we can conclude that the probabilistic Markov chains are not suitable for task allocation for such environments. Nevertheless,
Figure 11 shows the same powered probabilistic matrix
when the probabilistic transitions are induced by the YPRF with 20 tasks clustered into 8 groups and
. In this case, the system shows a consistent behaviour and the results are very similar to those obtained with fuzzy Markov chains (see
Figure 9), specially when
has a high value. Although only the environment with 8 clusters of tasks has been showed for all the experiments, similar results have been obtained with a different number of clusters.
4.4.4. Impact of the Number of Clusters
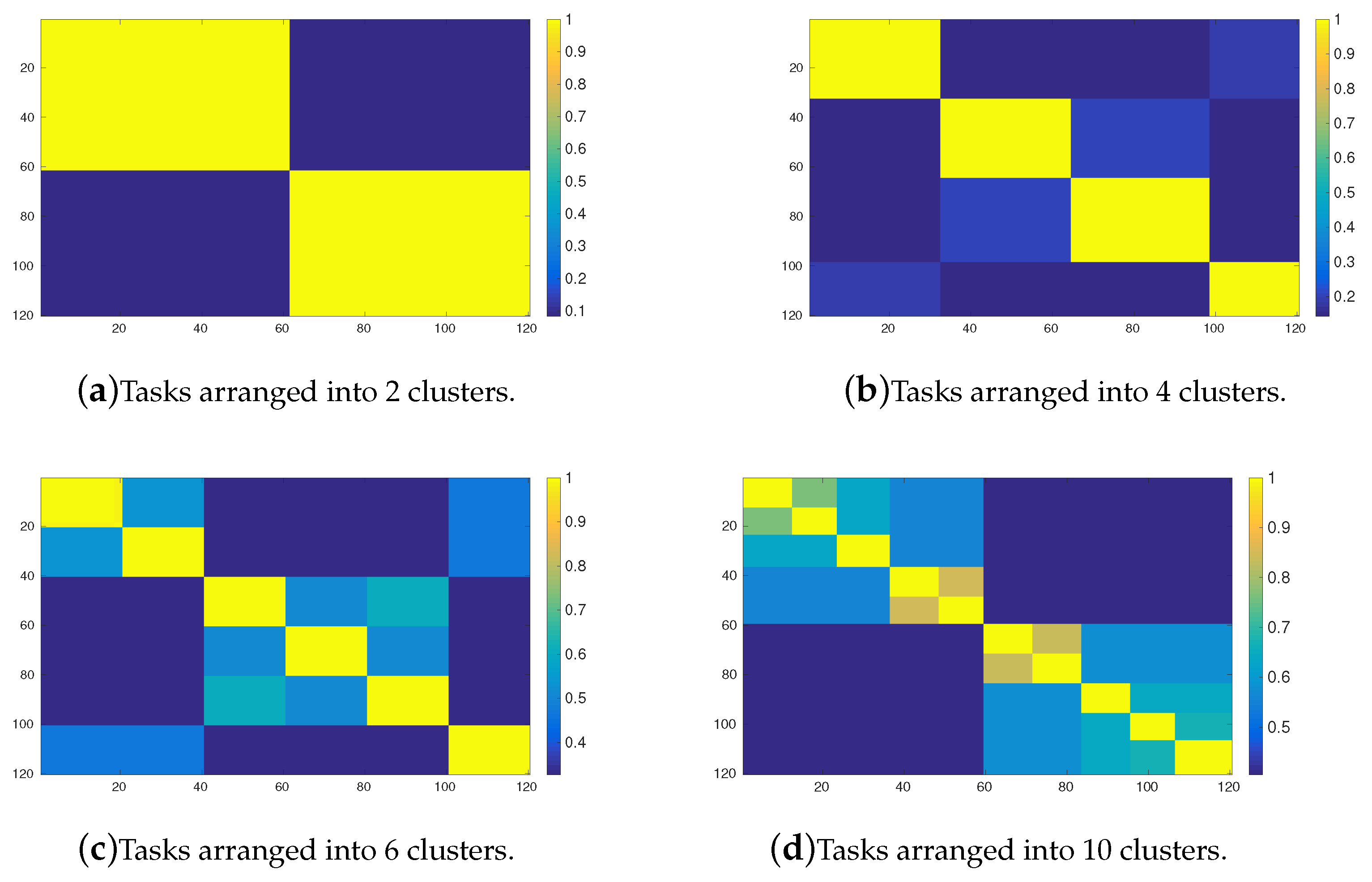
The impact of the number of clusters of tasks on the transition matrix after reaching a stationary possibilistic distribution can be observed in
Figure 12 and
Figure 13 for the OPRF and for the YPRF, respectively. The value of
parameter is in both equal to 4. In the light of these experiments, the meaning of the value
, given in
Section 4.2, seems properly interpreted. Recall that the
parameter can be viewed as the portion of the space available from a given place when transition matrix is induced by the YRPF operator. In this case
and, therefore, when the YRPF operator is used the agents can reach
of the whole space. As can be seen, when the number of cluster is not equal the
value, in this case 4, and the transition matrix is induced by ORPF, the transition possibility from one cluster to another one could be greater than zero, and therefore the agents are able to “jump” from one cluster to another one. This behaviour could be undesirable in some situations. For example,
Figure 12b shows the results for ORPF when the number of clusters is equal to the
parameter. In this case, when an agent stays in a cluster it has a very high possiblitity to remain in the same cluster (see the yellow squares) but has a low possibility to visit the neighbouring groups (soft blue or green squares). In contrast, when the number of cluster is 10, much greater than
, (see
Figure 12d) the possibility of one agent to scape from its original group is higher. As can be seen, the soft blue or green squares, that stand for low possibility values but greater than zero, are more common in the figure. In contrast, when the transition matrix is induced by the YPRF, the fuzzy Markov chain is able to identify in a more precise way the clusters of tasks of the environment (see
Figure 13a–d). For example, with tasks arranged into 6 clusters and considering the YRPF,the possibility of an agent to transit from one cluster to another one is very low if it is compared with its ORPF counterpart.
4.5. Summary and Discussion of the Experimental Results
In the light of the experimental results we can draw some conclusions that are summarized in this section. Maybe the most interesting conclusion from the experiments has been to note that, even if the probabilistic Markov chain converges, the probabilistic transition matrix induced with the OPRF, after a great number of iterations (500 during the experiments), exhibits a very unnatural behaviour that makes them not suitable for modelling task allocation problems in the considered environments and the possible real situations exhibited in
Section 4.1. Moreover, a very few number of probabilistic Markov chains converge, in contrast the convergence is guaranteed for all their possibilistic counterparts induced by OPRFs or YRPFs. Finally, it must be stressed that the possibilistic Markov chains whose transition matrix is induced through YPRFs show an appropriate a very good behaviour for environments with tasks clustered into groups and, thus, they would be a suitable mathematical tool for modelling real missions as those mentioned in
Section 4.1, unlike the possibilsitic Markov chains whose transition matrix is induced through the OPRF.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}