
Dynamic Modeling and Vibration Characteristics Analysis of Deep-Groove Ball Bearing, Considering Sliding Effect


Abstract
:1. Introduction
2. Dynamic Modeling of the DGB 6205 System
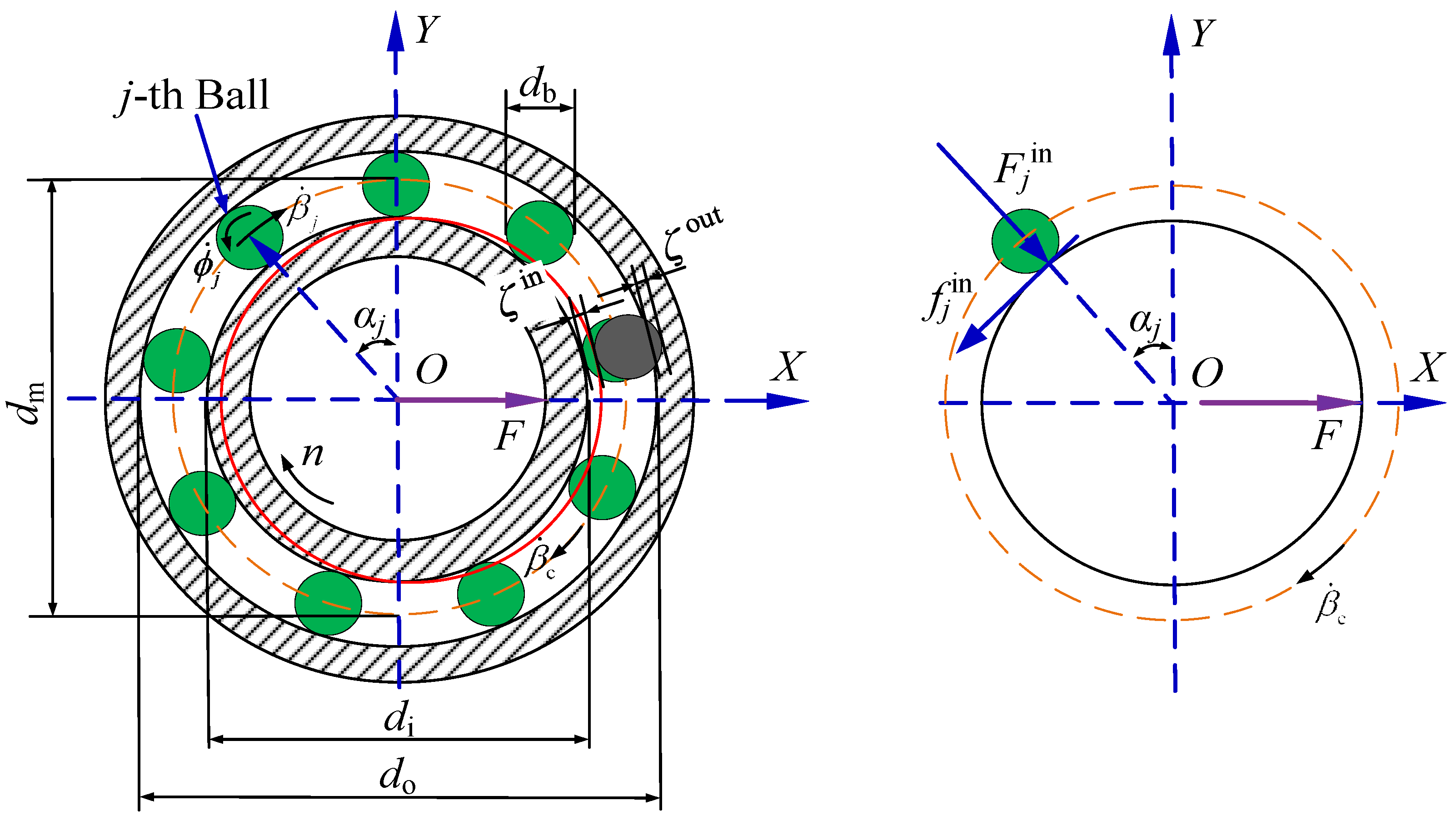
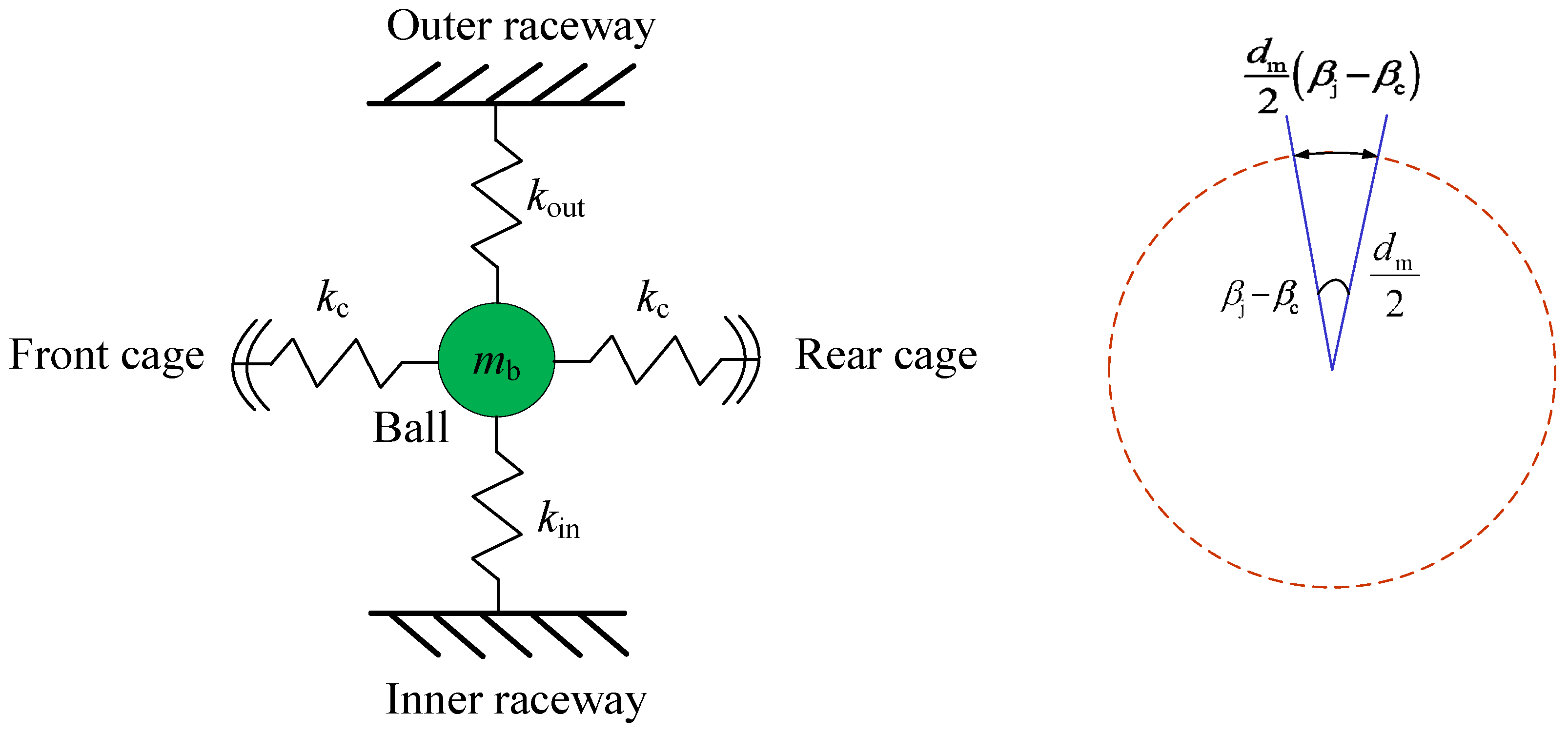
2.1. Equivalent Model of the DGB 6205 System
2.2. Differential Equations of Motion of the DGB 6205 System
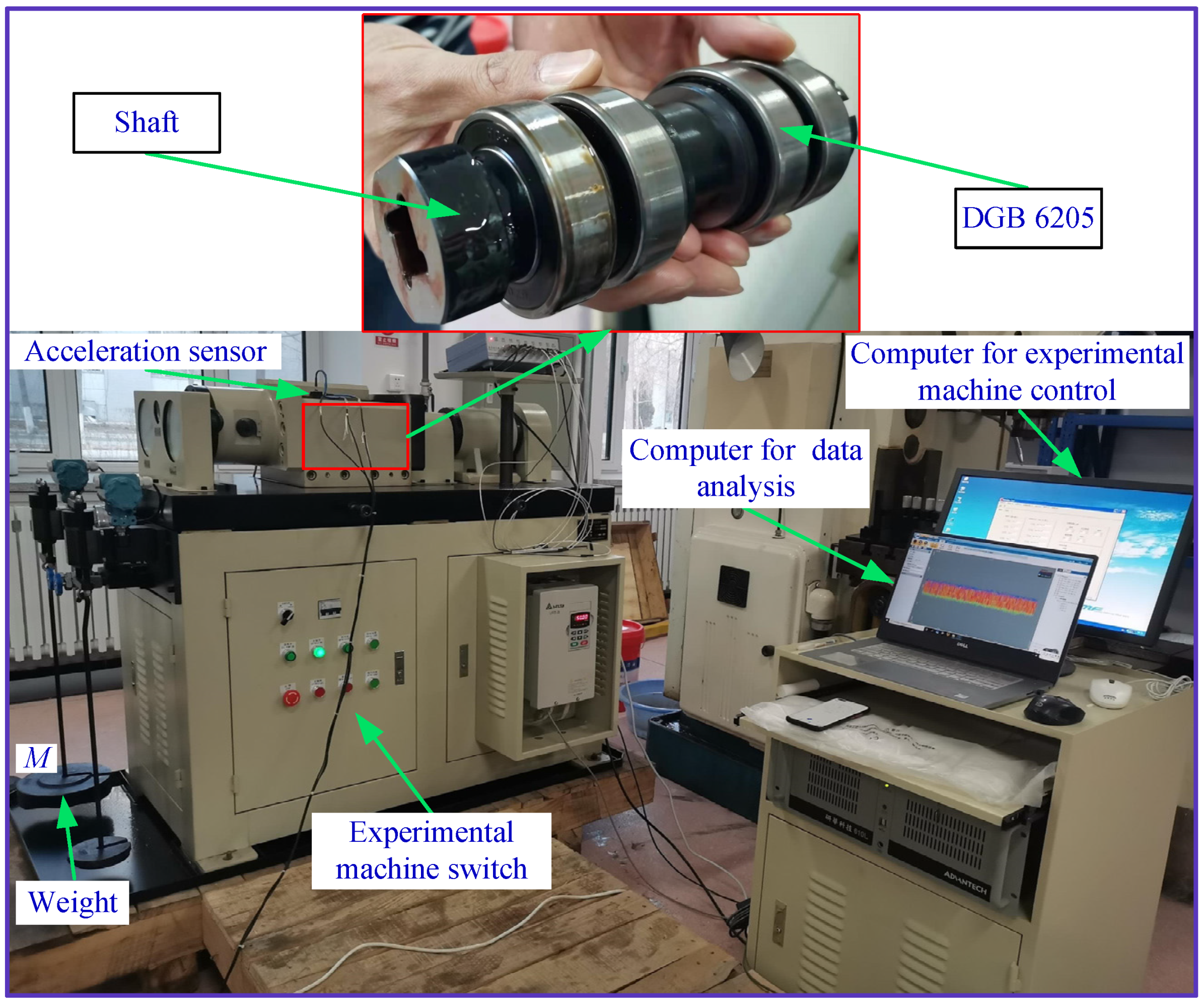
3. Experimental Verification
4. Results and Discussion
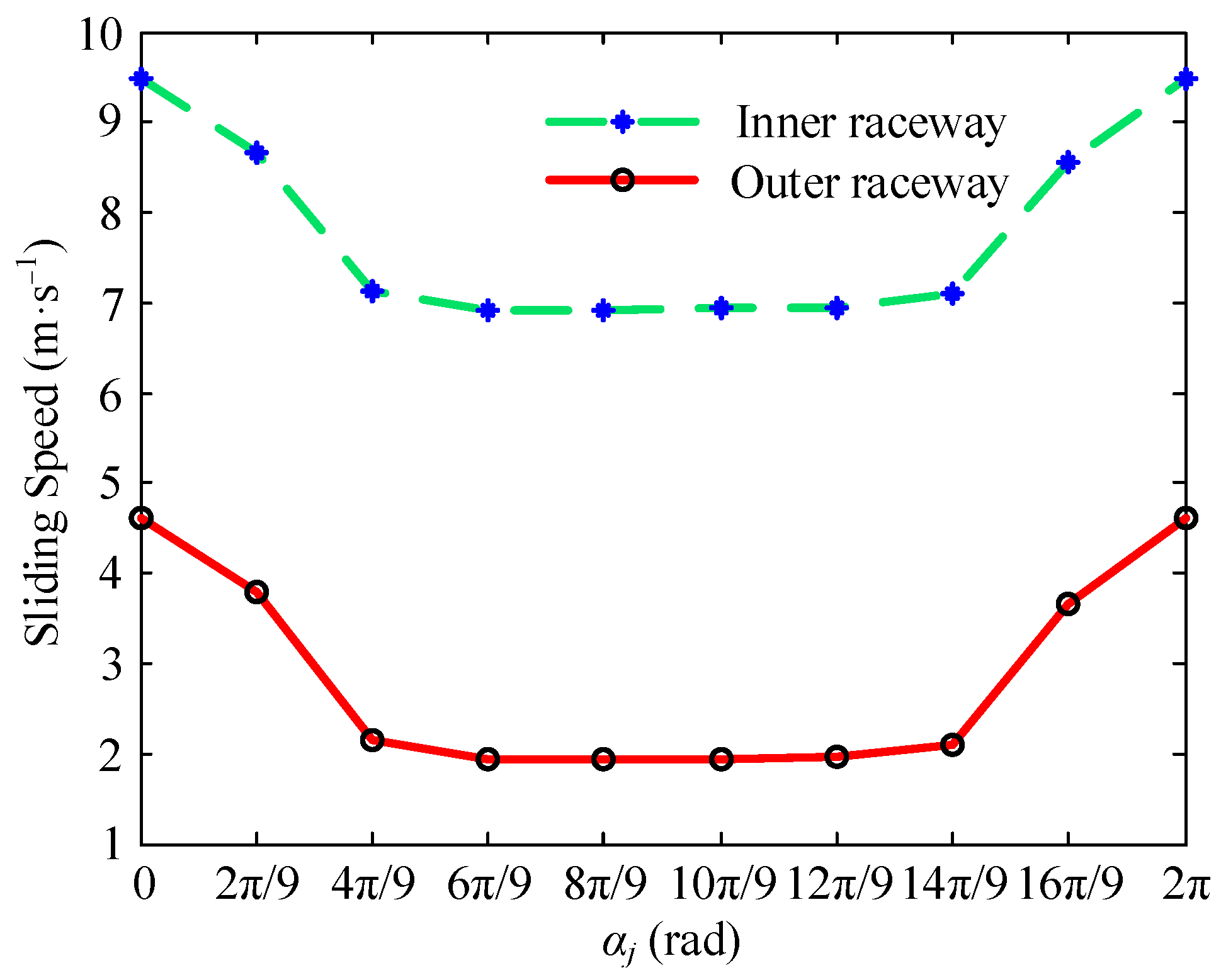
4.1. Analysis of Slip Characteristics of DGB 6205 System
4.2. Influence of Time-Varying Load on the Characteristics of DGB 6205 System
4.3. Sensitivity Analysis of DGB 6205 System Dynamic Response
5. Conclusions
- (1)
- The sliding speed between the ball and the inner raceway is greater than that between the ball and the outer raceway. With the increase of load F, the sliding speed of the ball and inner and outer raceways decreases gradually. The increase of speed n will lead to the increase of sliding speed, and the DGB 6205 system is more prone to the sliding phenomenon when operating at high speed.
- (2)
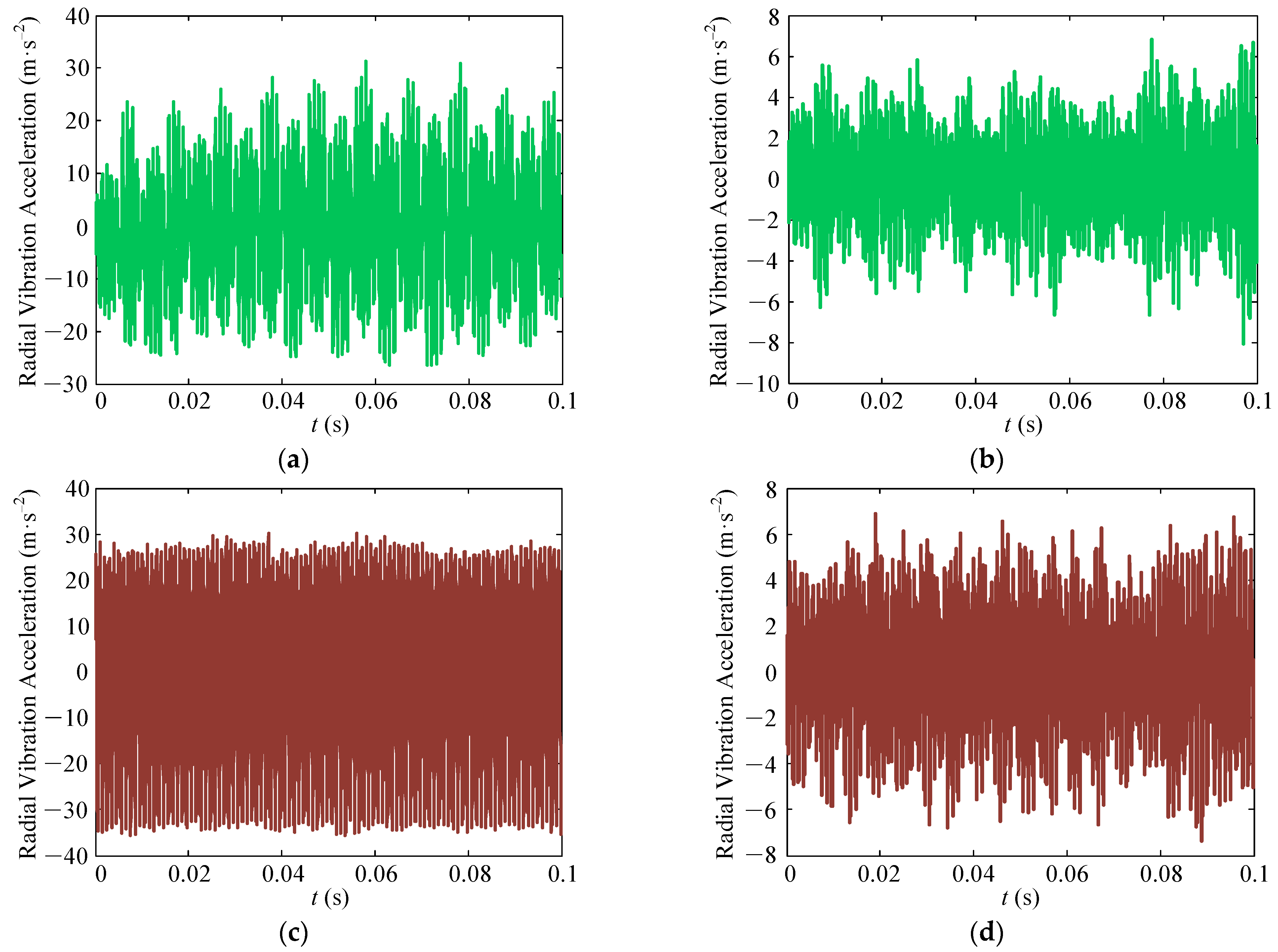
- Compared with the constant load condition, the radial vibration response of the DGB 6205 system under time-varying load is smaller. In the X direction, the root mean square value of radial vibration acceleration decreases from 20.17 to 11.81 m·s−2. In the Y direction, the root mean square value of radial vibration acceleration decreases from 2.20 to 1.81 m·s−2.
- (3)
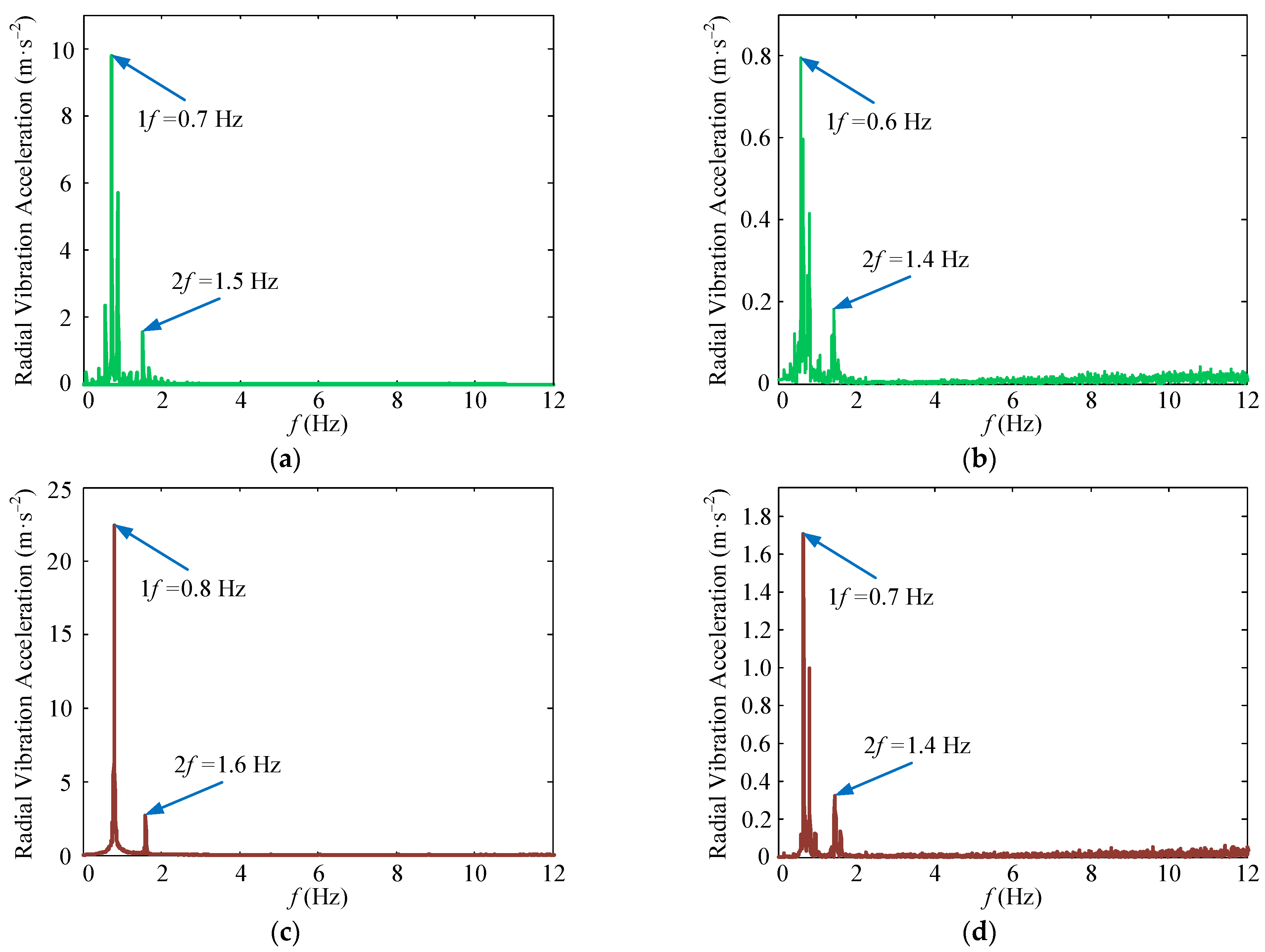
- With the increase of frequency, the amplitude of the dynamic response of the DGB 6205 system under constant load and time-varying load gradually decreases. At the same time, the introduction of the time-varying load will lead to the forward shift of the natural frequency phase.
- (4)
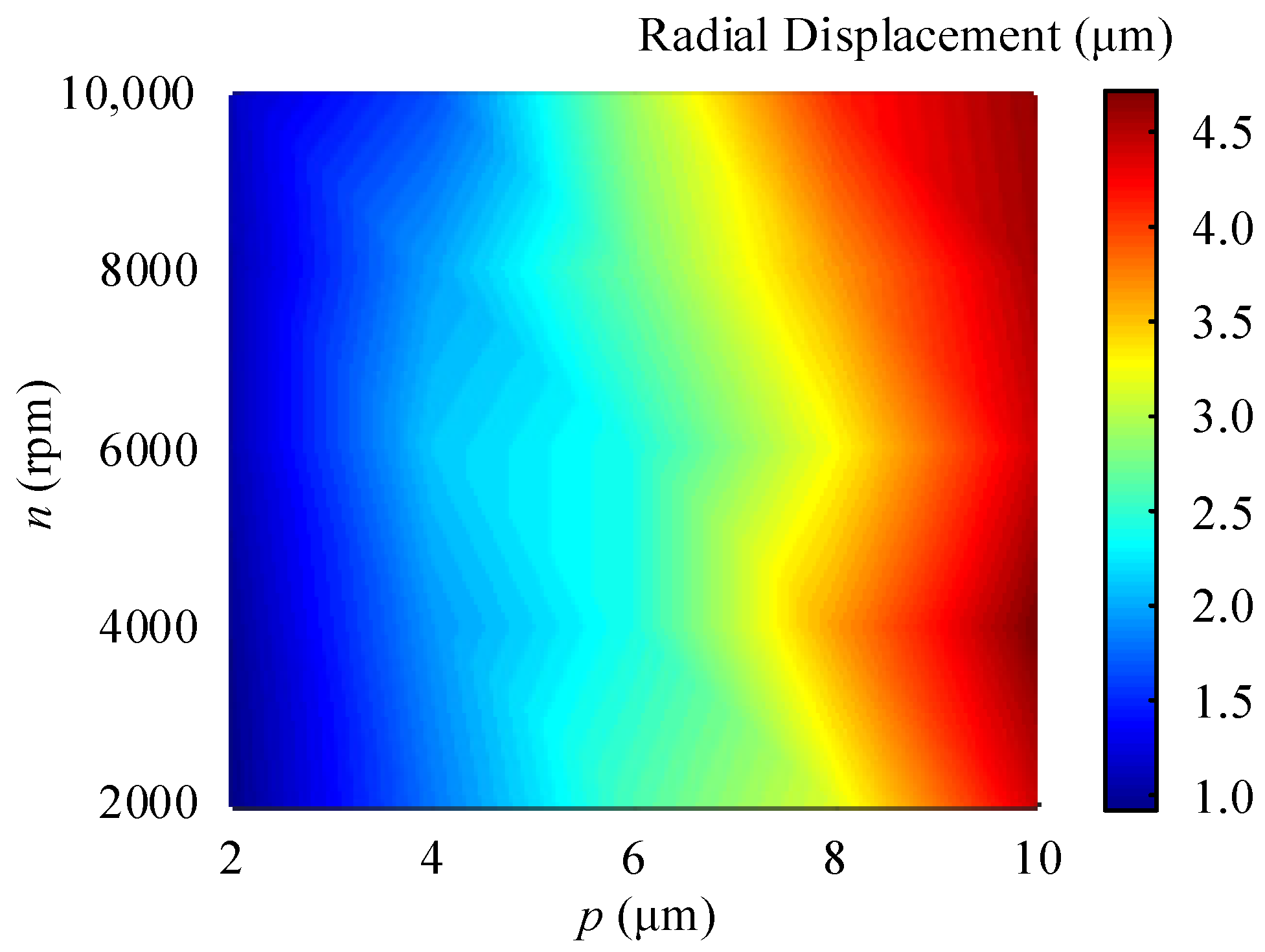
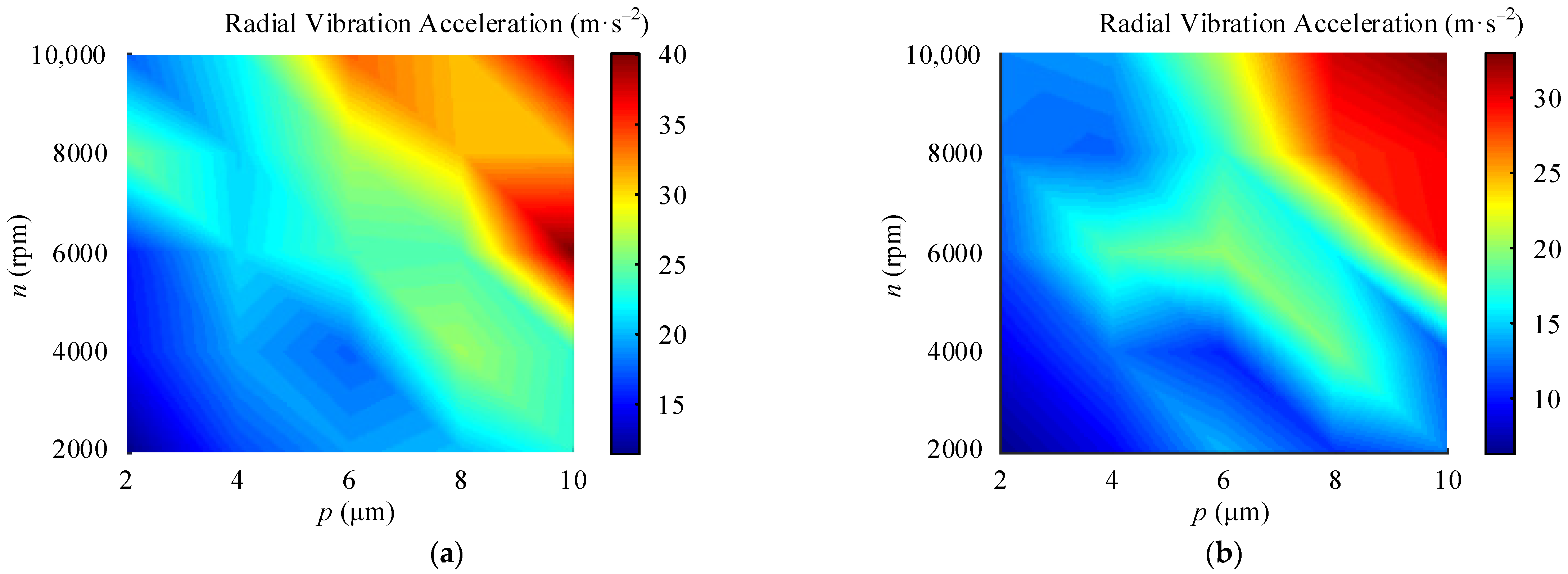
- The increase of radial clearance p will increase the dynamic response of the system. The dynamic response of the system is highly sensitive to the radial clearance p, and the sensitivity of the dynamic response of the system to the velocity n is lower than that of radial clearance p.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Harris, T.A. An analytical method to predict skidding in high speed roller bearings. ASLE Trans. 1966, 9, 229–241. [Google Scholar] [CrossRef]
- Harris, T.A. An analytical method to predict skidding in thrust-loaded, angular-contact ball bearings. J. Lubr. Technol. 1971, 93, 17–23. [Google Scholar] [CrossRef]
- Gupta, P.K. Dynamics of rolling-element bearings-part I: Cylindrical roller bearing analysis. J. Lubr. Technol. 1979, 101, 293–302. [Google Scholar] [CrossRef]
- Gupta, P.K. Dynamics of rolling-element bearings-part II: Cylindrical roller bearing results. J. Lubr. Technol. 1979, 101, 305–311. [Google Scholar] [CrossRef]
- Chen, W.; Ma, Z.; Liang, G.; Li, X.; Pan, J. Quasi-static analysis of thrust-loaded angular contact ball bearings. part I: Theoretical formulation. Chin. J. Mech. Eng. 2012, 25, 71–80. [Google Scholar] [CrossRef]
- Chen, W.; Ma, Z.; Liang, G.; Li, X.; Pan, J. Quasi-static analysis of thrust-loaded angular contact ball bearings. part II: Results and discussion. Chin. J. Mech. Eng. 2012, 25, 81–87. [Google Scholar] [CrossRef]
- Liao, N.T.; Lin, J.F. Ball bearing skidding under radial and axial loads. Mech. Mach. Theory 2002, 37, 91–113. [Google Scholar] [CrossRef]
- Tu, W.; Shao, Y.; Mechefske, C.K. An analytical model to investigate skidding in rolling element bearings during acceleration. J. Mech. Sci. Technol. 2012, 26, 2451–2458. [Google Scholar] [CrossRef]
- Shi, Z.; Liu, J. An improved planar dynamic model for vibration analysis of a cylindrical roller bearing. Mech. Mach. Theory 2020, 153, 103994. [Google Scholar] [CrossRef]
- Han, Q.; Chu, F. Nonlinear dynamic model for skidding behavior of angular contact ball bearings. J. Sound Vib. 2015, 354, 219–235. [Google Scholar] [CrossRef]
- Lin, C.J.; Jhang, J.Y. Bearing fault diagnosis using a grad-cam-based convolutional neuro-fuzzy network. Mathematics 2021, 9, 1502. [Google Scholar] [CrossRef]
- Pan, Z.; Meng, Z.; Chen, Z.; Gao, W.; Shi, Y. A two-stage method based on extreme learning machine for predicting the remaining useful life of rolling-element bearings. Mech. Syst. Signal Process. 2020, 144, 106899. [Google Scholar] [CrossRef]
- Huang, F.; Sava, A.; Adjallah, K.H.; Wang, Z. Fuzzy model identification based on mixture distribution analysis for bearings remaining useful life estimation using small training data set. Mech. Syst. Signal Process. 2021, 148, 107173. [Google Scholar] [CrossRef]
- Kundu, P.; Darpe, A.K.; Kulkarni, M.S. Weibull accelerated failure time regression model for remaining useful life prediction of bearing working under multiple operating conditions. Mech. Syst. Signal Process. 2019, 134, 106302. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, N.; Shen, C. A new data-driven transferable remaining useful life prediction approach for bearing under different working conditions. Mech. Syst. Signal Process. 2020, 139, 106602. [Google Scholar] [CrossRef]
- Li, F.; Li, X.; Guo, Y.; Shang, D. Analysis of contact mechanical characteristics of flexible parts in harmonic gear reducer. Shock Vib. 2021, 2, 5521320. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y. Dynamic modeling for rigid rotor bearing systems with a localized defect considering additional deformations at the sharp edges. J. Sound Vib. 2017, 398, 84–102. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y. A new dynamic model for vibration analysis of a ball bearing due to a localized surface defect considering edge topographies. Nonlinear Dyn. 2015, 79, 1329–1351. [Google Scholar] [CrossRef]
- Niu, L.; Cao, H.; He, Z.; Li, Y. A systematic study of ball passing frequencies based on dynamic modeling of rolling ball bearings with localized surface defects. J. Sound Vib. 2015, 357, 207–232. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, C.; Jiang, D.; Behdinan, K. Nonlinear vibration signatures for localized fault of rolling element bearing in rotor-bearing-casing system. Int. J. Mech. Sci. 2020, 173, 105449. [Google Scholar] [CrossRef]
- Yu, H.; Ran, Y.; Zhang, G.; Li, X.; Li, B. A time-varying comprehensive dynamic model for the rotor system with multiple bearing faults. J. Sound Vib. 2020, 488, 115650. [Google Scholar] [CrossRef]
- Cao, H.; Su, S.; Jing, X.; Li, D. Vibration mechanism analysis for cylindrical roller bearings with single/multi defects and compound faults. Mech. Syst. Signal Process. 2020, 144, 106903. [Google Scholar] [CrossRef]
- Ghafari, S.H.; Golnaraghi, F.; Ismail, F. Effect of localized faults on chaotic vibration of rolling element bearings. Nonlinear Dyn. 2008, 53, 287–301. [Google Scholar] [CrossRef]
- Qin, Y.; Li, C.; Wu, X.; Wang, Y.; Chen, H. Multiple-degree-of-freedom dynamic model of rolling bearing with a localized surface defect. Mech. Mach. Theory 2020, 154, 104047. [Google Scholar] [CrossRef]
- Gupta, P.K. Dynamic loads and cage wear in high-speed rolling bearings. Wear 1991, 147, 119–134. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Notation | Value |
|---|---|---|
| Number of balls | Z | 9 |
| Diameter of outer raceway | do | 45.84 mm |
| Diameter of inner raceway | di | 33.16 mm |
| Pitch diameter of bearing | dm | 39.50 mm |
| Ball diameter | db | 6.34 mm |
| Mass of inner race and shaft | ms | 0.825 kg |
| Density of bearing steel | ρ | 7810 kg/m3 |
| Moment of inertia of cage | Ic | 0.86 × 10−6 kg·m2 |
| Contact stiffness between ball and inner raceway | kin | 3.18 × 1010 N/m |
| Contact stiffness between ball and outer raceway | kout | 3.36 × 1010 N/m |
| Contact stiffness between cage and ball | kc | 6.06 × 109 N/m |
| Gravitational acceleration | g | 9.8 m/s2 |
| Radial clearance | p | 10 μm |
| Friction coefficient between cage and ball | μc | 0.002 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Li, X.; Shang, D. Dynamic Modeling and Vibration Characteristics Analysis of Deep-Groove Ball Bearing, Considering Sliding Effect. Mathematics 2021, 9, 2408. https://doi.org/10.3390/math9192408
Li F, Li X, Shang D. Dynamic Modeling and Vibration Characteristics Analysis of Deep-Groove Ball Bearing, Considering Sliding Effect. Mathematics. 2021; 9(19):2408. https://doi.org/10.3390/math9192408
Chicago/Turabian StyleLi, Fanjie, Xiaopeng Li, and Dongyang Shang. 2021. "Dynamic Modeling and Vibration Characteristics Analysis of Deep-Groove Ball Bearing, Considering Sliding Effect" Mathematics 9, no. 19: 2408. https://doi.org/10.3390/math9192408
APA StyleLi, F., Li, X., & Shang, D. (2021). Dynamic Modeling and Vibration Characteristics Analysis of Deep-Groove Ball Bearing, Considering Sliding Effect. Mathematics, 9(19), 2408. https://doi.org/10.3390/math9192408