


H∞ and Passive Fuzzy Control for Non-Linear Descriptor Systems with Time-Varying Delay and Sensor Faults

 , , ,
, , ,
Abstract
:1. Introduction
- The system under consideration is subject to real factors, such as time-varying delay, uncertainties, and random non-linear external disturbances. Moreover, by employing the delay decomposition and reciprocally convex approaches, a new admissible criterion is established to improve the existing ones;
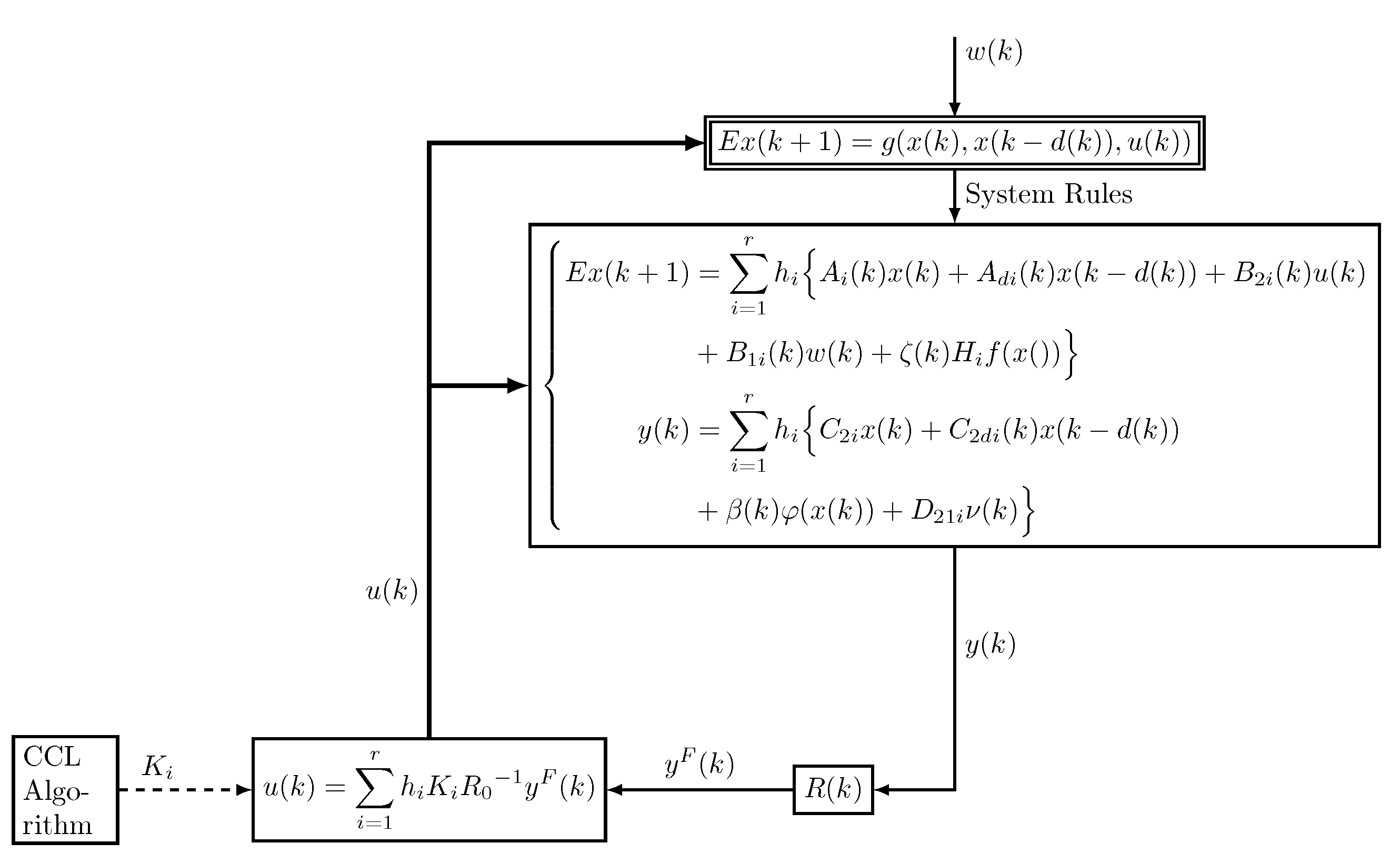
- Design a new reliable SOF controller for a descriptor system subject to stochastic non-linearities and sensors failures;
- Provide a simple method of the controller design based on introducing appropriate augmented closed-loop systems that decouple the output matrices and controller gain matrices;
2. Preliminaries
- and are assumed to satisfy the following admissible conditions:where , and are known real constant matrices of appropriate dimensions, and is an unknown time-varying matrix function subject to .
- The non-linear functions and are assumed to be continuous and satisfies the following conditions:where , , and are real matrices with compatible dimensions.
- In order to obtain a TS fuzzy model with a few rules, we can perform the sector non-linearity approach [17] for a restrictive number of non-linear terms included in the system under consideration. In addition, due to the environmental circumstances, such as random failures of the system components, sudden environment changes and unexpected change in the subsystem interconnections, etc., the processes are probably influenced by additive randomly occurred non-linear disturbances. Consequently, the term in (1) involves both model uncertainties and random occurred non-linearities.
- It is worth mentioning that sensors may not always produce ideal signals, due mainly to environmental constraints. The system’s output in (1) reflects tightly the reality; however, it turns out that the controller design is more difficult.
- In this study, it is assumed that the non-linear functions belong to sectors. This description, suggested in [34], is more general, and includes the usual Lipschitz conditions as a special case.
- pair is said to be regular if is not identically zero;
- pair is said to be causal, if it is regular and ;
- Pair is said to be admissible, if it is regular, causal and stable;
- If , inequality (9) reduces to an performance requirement.
- If , inequality (9) corresponds to the passivity performance index.
3. Admissibility Analysis
4. Reliable SOF Controller Design
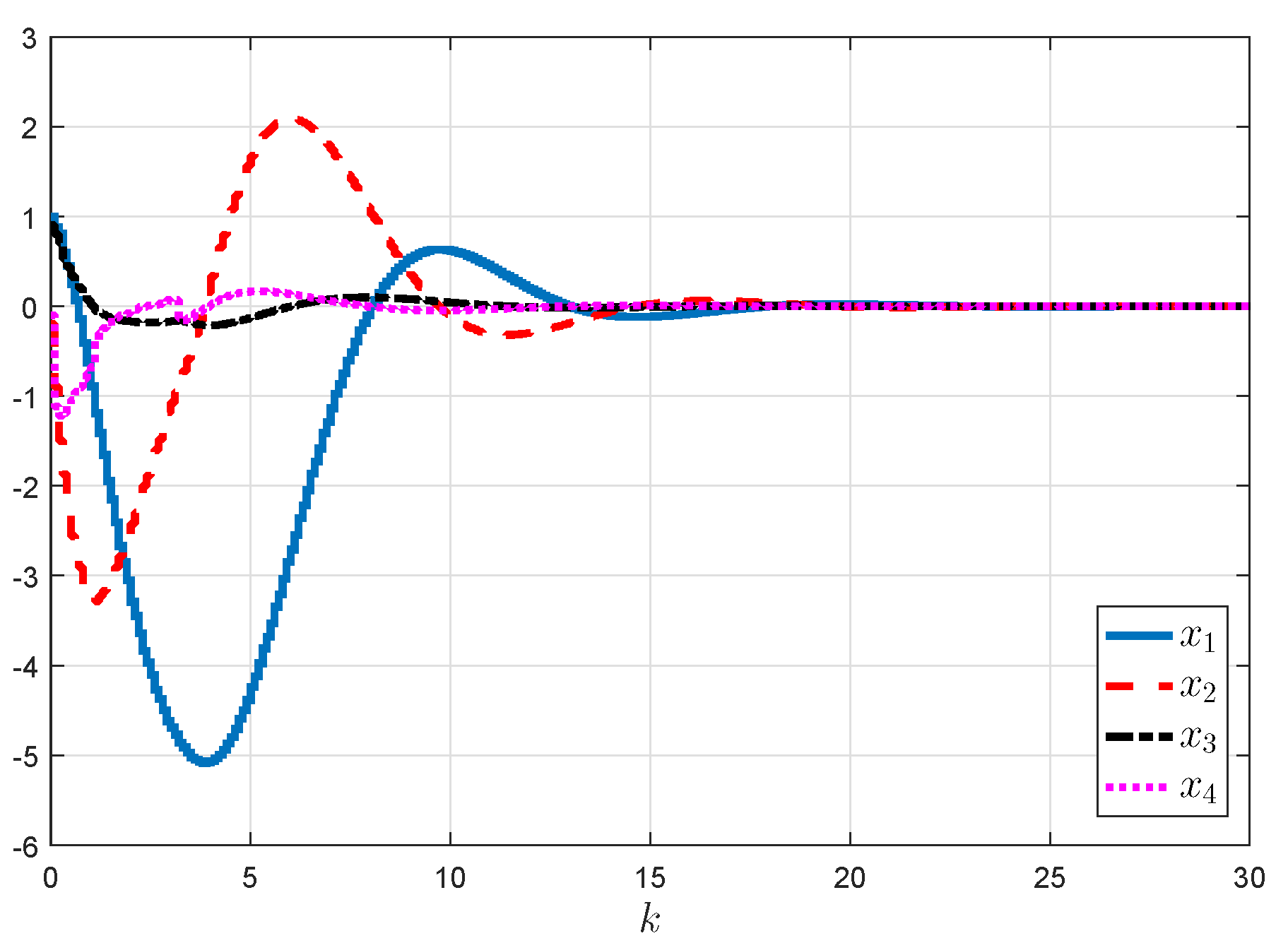
- The resulting closed-loop system is robustly mean-square admissible,
- Under zero-initial condition, the mixed /passive performance is satisfied in the sense of Definition 2.
4.1. Mixed /Passive Analysis
4.2. Reliable Controller Synthesis
| Algorithm 1: Find a feasible solution of the above minimisation problem |
|
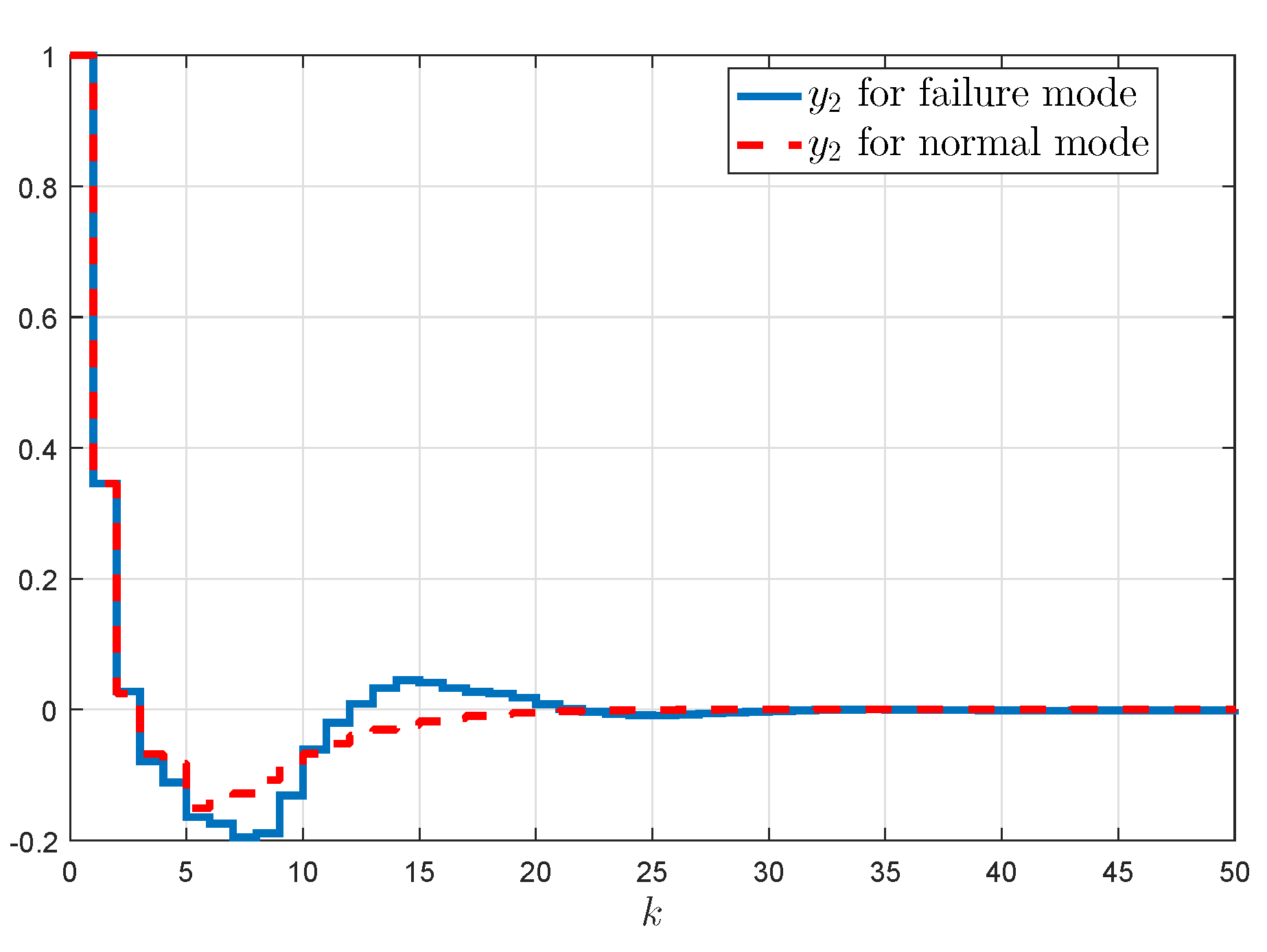
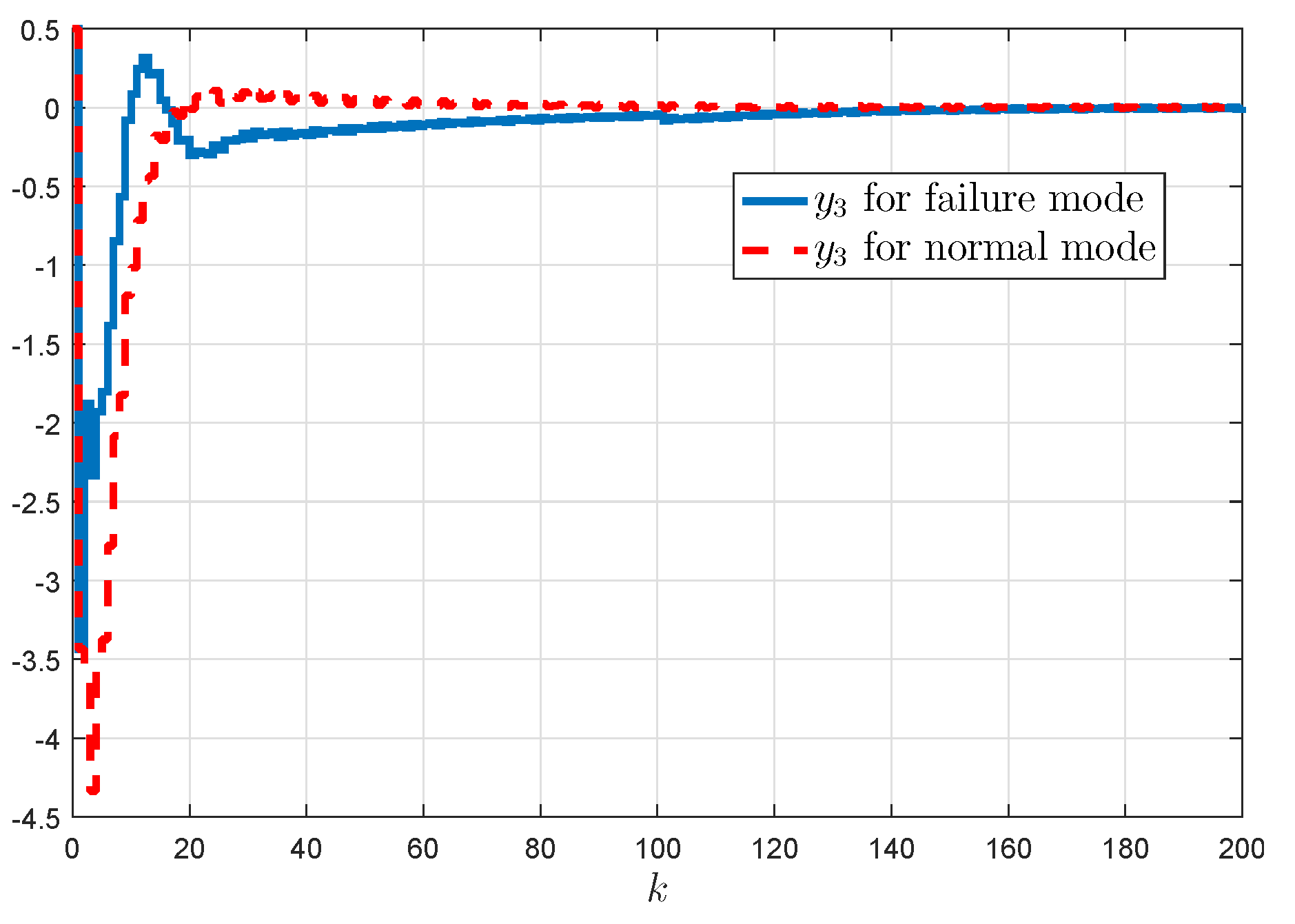
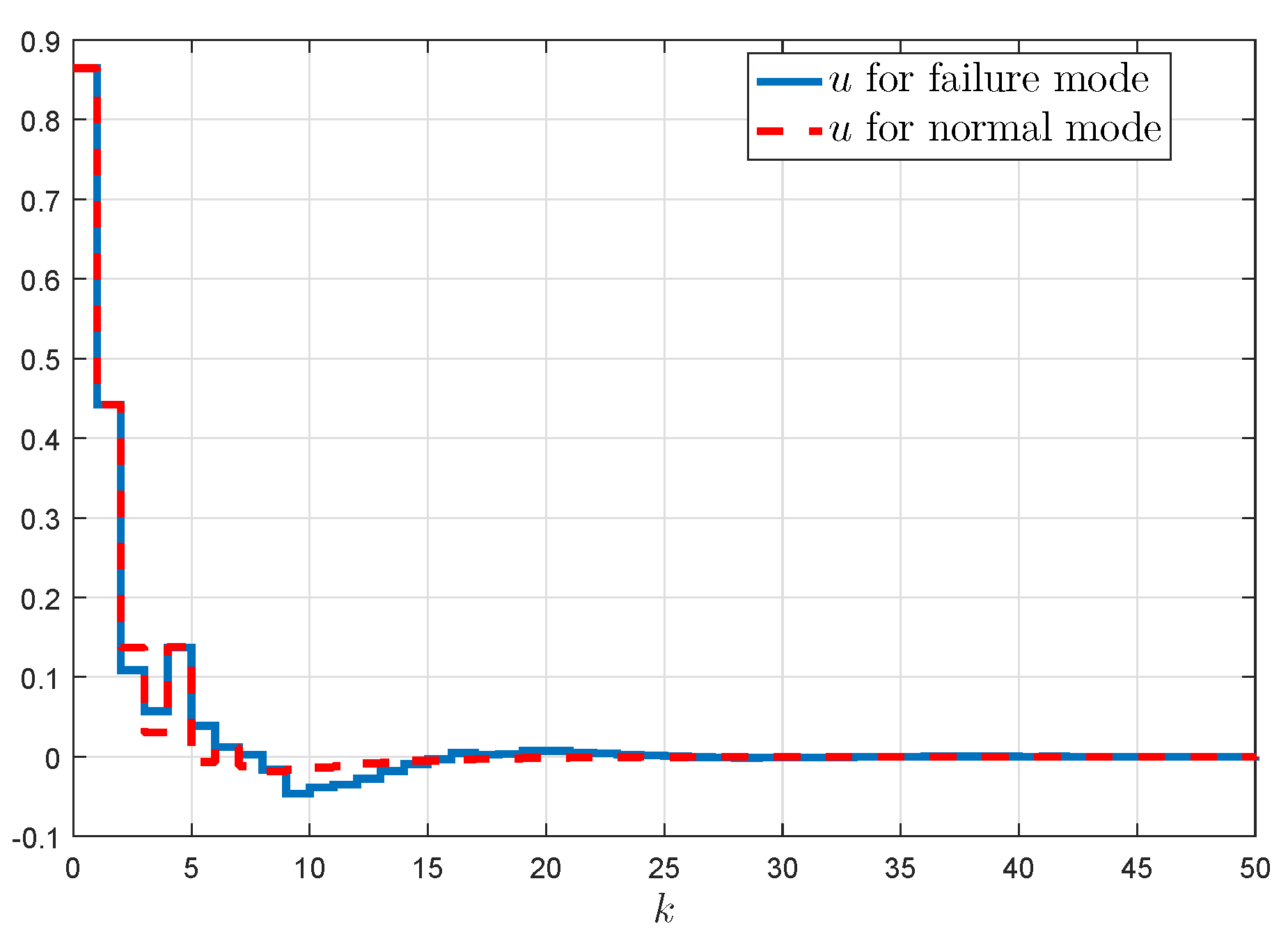
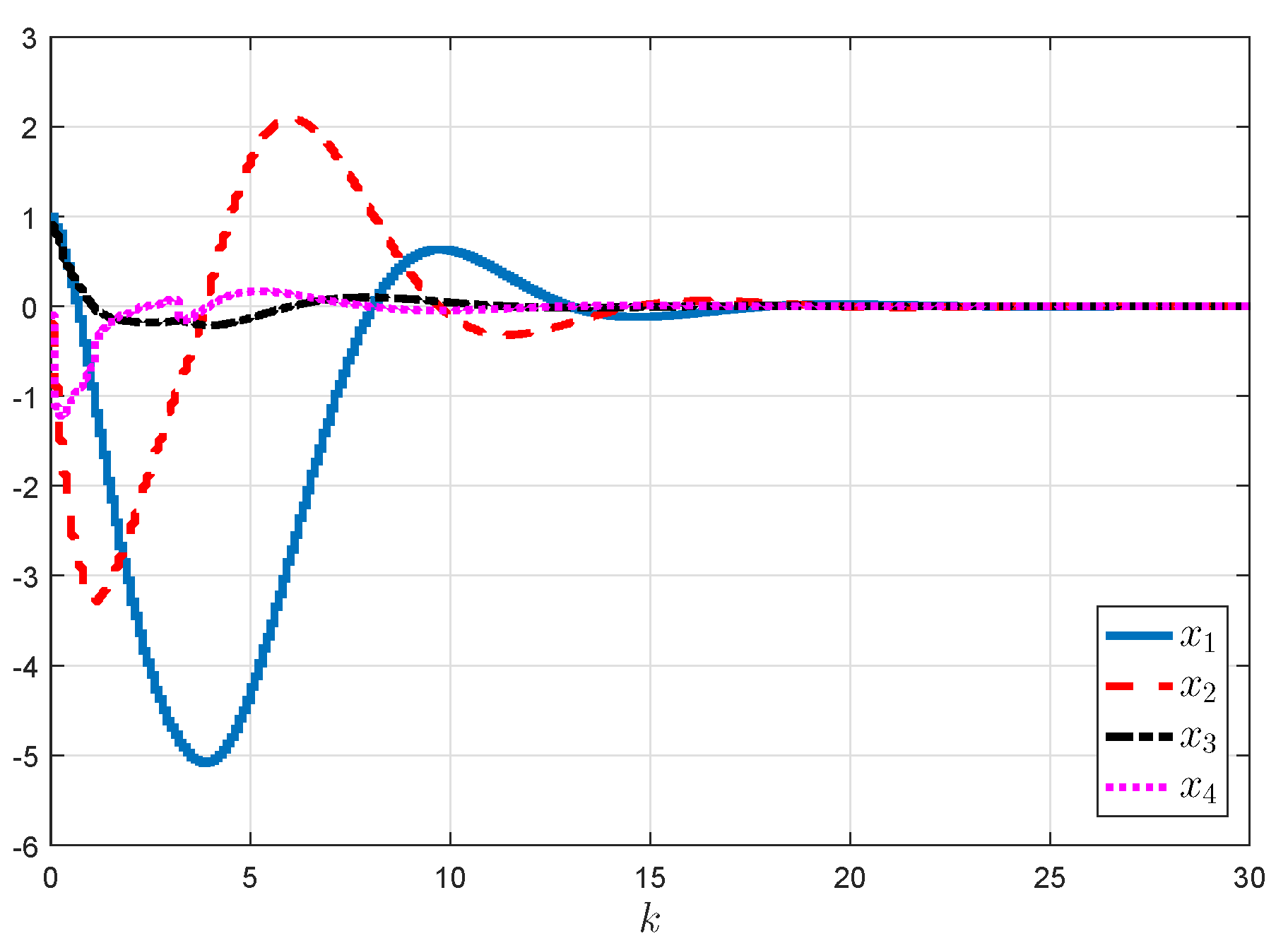
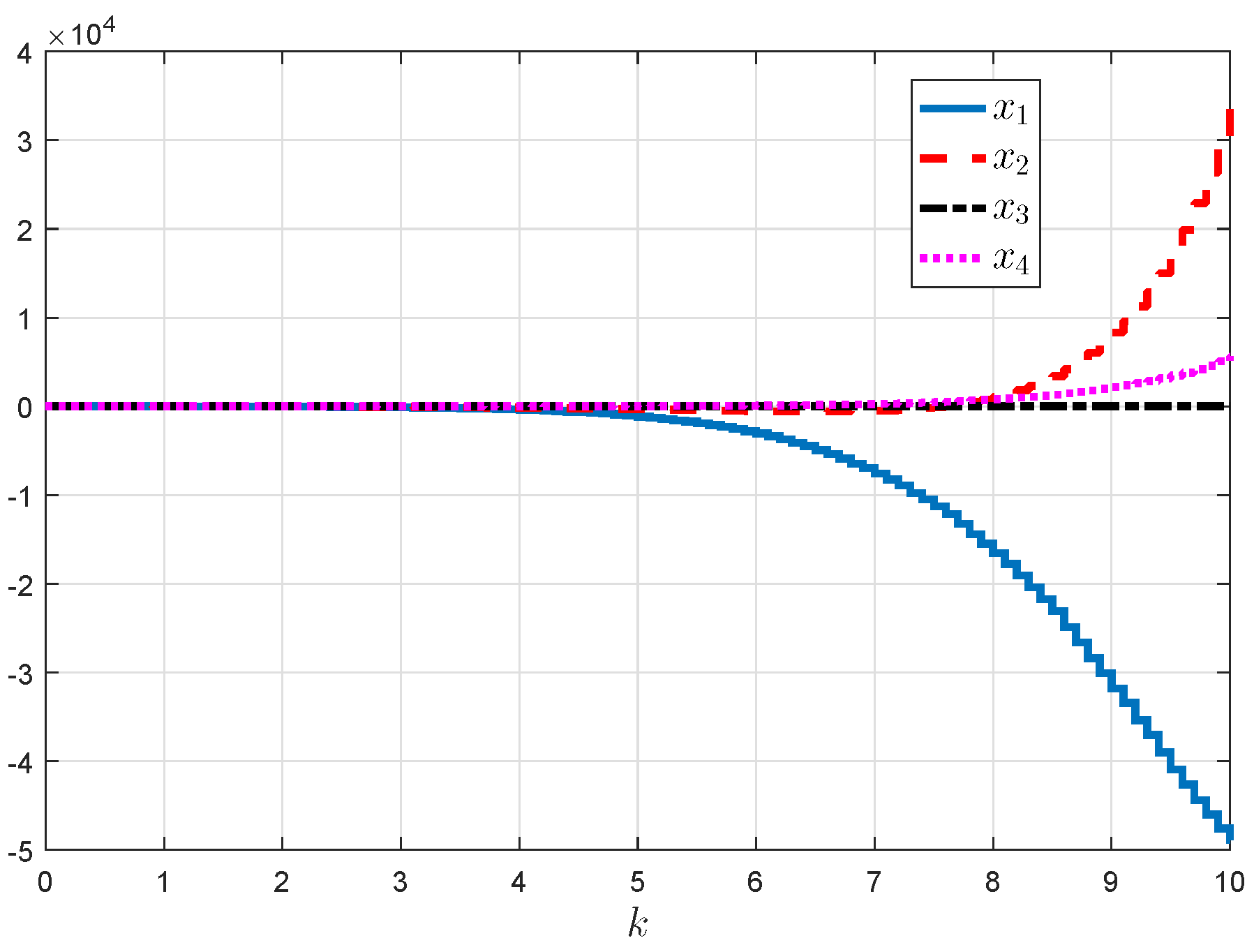
5. Numerical Examples
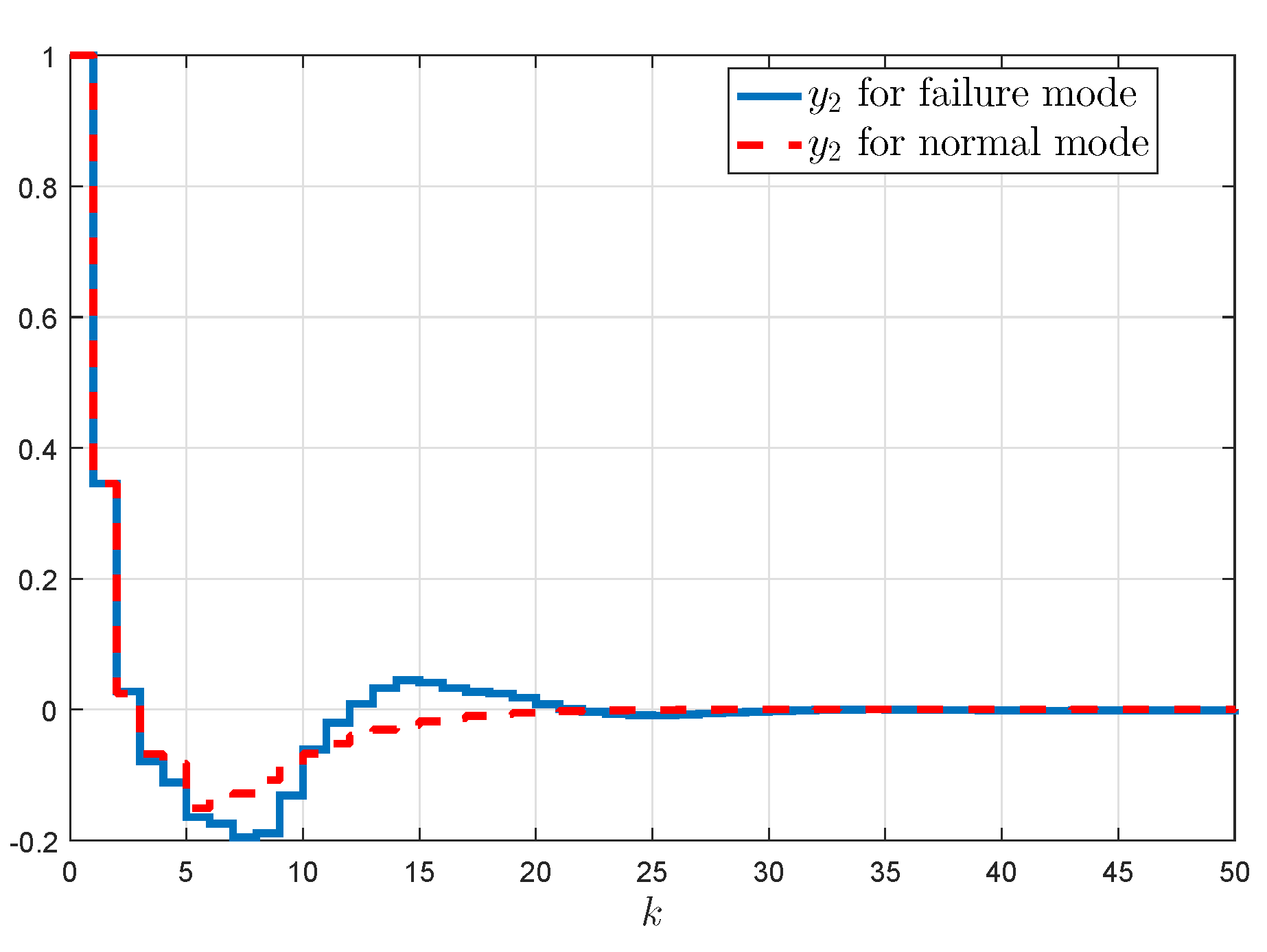
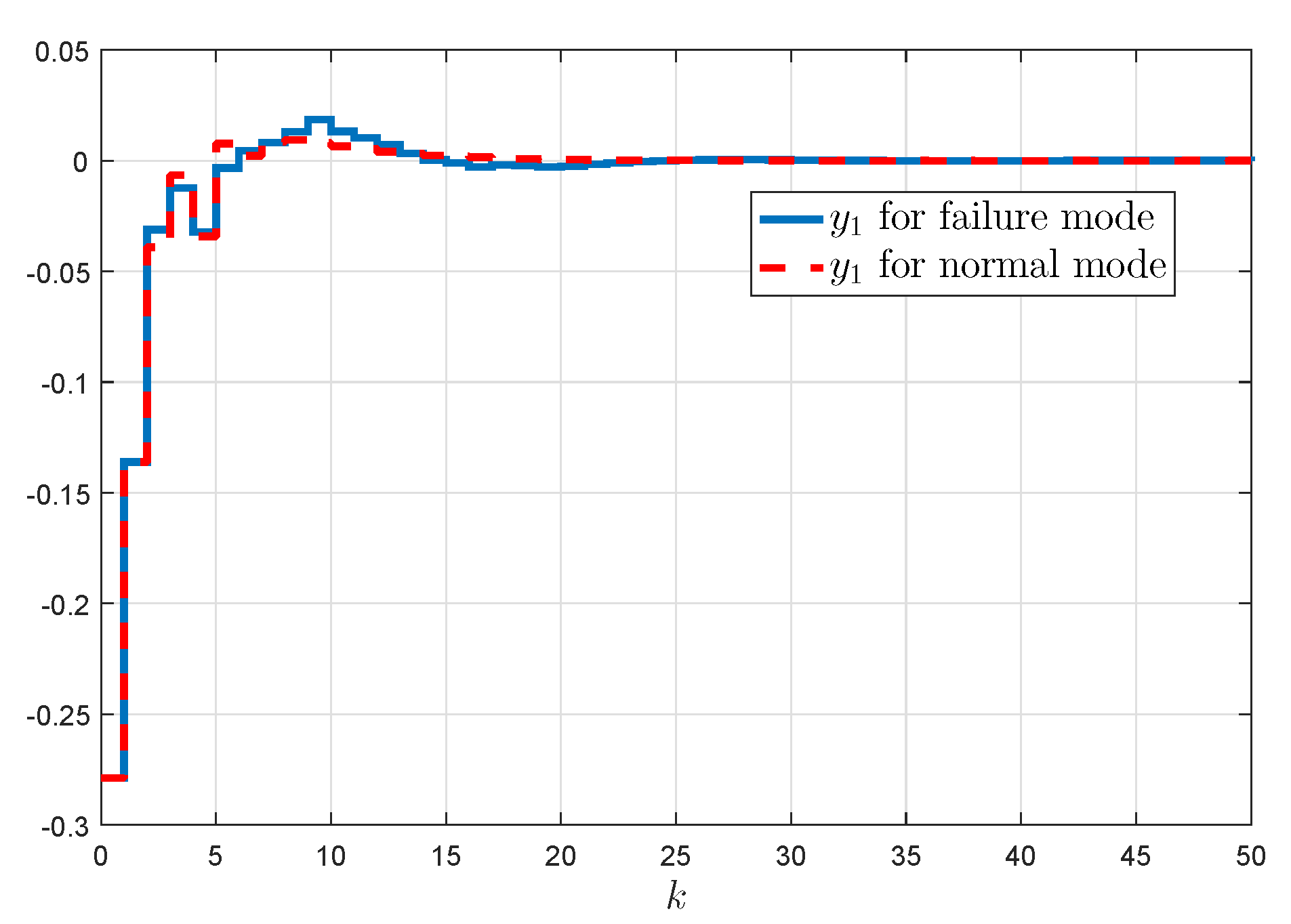
- Normal mode, where reliable controller (91) is applied for a normal case without any failure;
- Failure mode, where the proposed reliable controller (91) is implemented when the previous scenario affects the systems.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dai, L. Singular Control Systems. In Lecture Notes in Control and Information Sciences; Springer: New York, NY, USA, 1989; Volume 118. [Google Scholar]
- Duan, G. Analysis and Design of Descriptor Linear Systems; Springer: New York, NY, USA, 2010. [Google Scholar]
- Liu, Y.; Ma, Y.; Wang, Y. Reliable sliding mode finite-time control for discrete-time singular Markovian jump systems with sensor fault and randomly occurring nonlinearities. Int. J. Robust Nonlinear Control 2018, 28, 381–402. [Google Scholar] [CrossRef]
- Long, S.; Zhong, S. H∞ control for a class of discrete-time singular systems via dynamic feedback controller. Appl. Math. Lett. 2016, 58, 110–118. [Google Scholar] [CrossRef]
- Ma, S.; Cheng, Z.; Zhang, C. Delay-dependent robust stability and stabilisation for uncertain discrete singular systems with time-varying delays. IET Control Theory Appl. 2007, 1, 1086–1095. [Google Scholar] [CrossRef]
- Zeng, Y.; Han, C.; Na, Y.; Lu, Z. Fuzzy-model-based admissibility analysis for nonlinear discrete-time descriptor system with time-delay. Neurocomputing 2016, 189, 80–85. [Google Scholar] [CrossRef]
- Fang, M. Delay-dependent stability analysis for discrete singular systems with time-varying delays. Acta Autom. Sin. 2010, 36, 751–755. [Google Scholar] [CrossRef]
- Wu, Z.; Park, J.H.; Su, H.; Chu, J. Admissibility and dissipativity analysis for discrete-time singular systems with mixed time-varying delays. Appl. Math. Comput. 2012, 2018, 7128–7138. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; Li, W.; Lam, J. New admissibility analysis for discrete singular systems with time-varying delay. Appl. Math. Comput. 2015, 265, 1058–1066. [Google Scholar] [CrossRef]
- Chen, J.; Lin, C.; Chen, B.; Wang, Q.G. Fuzzy-model-based admissibility analysis and output feedback control for nonlinear discrete-time systems with time-varying delay. Inf. Sci. 2017, 412–413, 116–131. [Google Scholar] [CrossRef]
- Kchaou, M. Robust H∞ Observer-Based Control for a Class of (TS) Fuzzy Descriptor Systems with Time-Varying Delay. Int. J. Fuzzy Syst. 2017, 19, 909–924. [Google Scholar] [CrossRef]
- Regaieg, M.A.; Kchaou, M.; El Hajjaji, A.; Chaabane, M. Robust H∞ guaranteed cost control for discrete-time switched singular systems with time-varying delay. Optim. Control Appl. Methods 2019, 40, 119–140. [Google Scholar] [CrossRef]
- Samorn, N.; Yotha, N.; Srisilp, P.; Mukdasai, K. LMI-Based Results on Robust Exponential Passivity of Uncertain Neutral-Type Neural Networks with Mixed Interval Time-Varying Delays via the Reciprocally Convex Combination Technique. Computation 2021, 9, 70. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems an its application to modelling and control. Trans Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Latrach, C.; Kchaou, M.; Rabhi, A.; El Hajjaji, A. Decentralized networked control system design using Takagi-Sugeno (TS) fuzzy approach. Int. J. Autom. Comput. 2015, 12, 125–133. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, K.; Wang, H. Fuzzy Control Systems Design and Analysis. A Linear Matrix Inequality Approach; Wiley: New York, NY, USA, 2001; p. 320. [Google Scholar]
- Li, W.; Feng, Z.; Sun, W.; Zhang, J. Admissibility analysis for Takagi–Sugeno fuzzy singular systems with time delay. Neurocomputing 2016, 205, 336–340. [Google Scholar] [CrossRef]
- Yang, P.; Ma, Y.; Yang, F.; Wang, D.K.L. Passivity control for uncertain singular discrete T-S fuzzy time-delay systems subject to actuator saturation. Int. J. Syst. Sci. 2018, 49, 1627–1640. [Google Scholar] [CrossRef]
- Ma, Y.; Yang, P.; Zhang, Q. Robust H∞ control for uncertain singular discrete TS fuzzy time-delay systems with actuator saturation. J. Frankl. Inst. 2016, 353, 3290–3311. [Google Scholar] [CrossRef]
- Balasubramaniam, P.; Nagamani, G.; Rakkiyappan, R. Passivity analysis for neural networks of neutral type with Markovian jumping parameters and time delay in the leakage term. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 4422–4437. [Google Scholar] [CrossRef]
- Liang, J.; Wang, Z.; Liu, X. On Passivity and Passification of Stochastic Fuzzy Systems With Delays:The Discrete-Time Case. IEEE Trans. Syst. Man Cybern. Part B 2010, 40, 964–969. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Z.; Park, J.; Su, H.; Song, B.; Chu, J. Mixed H∞ and passive filtering for singular systems with time delays. Signal Process. 2013, 93, 1705–1711. [Google Scholar] [CrossRef]
- Liu, Z.; Karimi, H.R.; Yu, J. Passivity-based robust sliding mode synthesis for uncertain delayed stochastic systems via state observer. Automatica 2020, 111, 108596. [Google Scholar] [CrossRef]
- Zheng, Q.; Ling, Y.; Wei, L.; Zhang, H. Mixed H∞ and passive control for linear switched systems via hybrid control approach. Int. J. Syst. Sci. 2018, 49, 818–832. [Google Scholar] [CrossRef]
- Chen, J.; Lin, C.; Chen, B.; Wang, Q. Mixed H∞ and passive control for singular systems with time delay via static output feedback. Appl. Math. Comput. 2017, 293, 244–253. [Google Scholar] [CrossRef]
- Zhu, M.; Chen, Y.; Kong, Y.; Chen, C.; Bai, J. Distributed filtering for Markov jump systems with randomly occurring one-sided Lipschitz nonlinearities under Round-Robin scheduling. Neurocomputing 2020, 417, 396–405. [Google Scholar] [CrossRef]
- Ji, H.; Zhang, H.; Li, C.; Senping, T.; Lu, J.; Wei, Y. H∞ control for time-delay systems with randomly occurring nonlinearities subject to sensor saturations, missing measurements and channel fadings. ISA Trans. 2018, 75, 38–51. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Sakthivel, R.; Selvi, S.; Mathiyalagan, K.; Shi, P. Reliable Mixed H∞ and Passivity-Based Control for Fuzzy Markovian Switching Systems with Probabilistic Time Delays and Actuator Failures. IEEE Trans. Cybern. 2015, 45, 2720–2731. [Google Scholar] [CrossRef]
- Chang, X.; Zhang, L.; Park, J. Robust static output feedback H∞ control for uncertain fuzzy system. Fuzzy Sets Syst. 2015, 87–104, 273. [Google Scholar]
- Zhang, D.; Zhou, Z.; Jia, X. Networked fuzzy output feedback control for discrete-time Takagi-Sugeno fuzzy systems with sensor saturation and measurement noise. Inf. Sci. 2018, 457–458, 182–194. [Google Scholar] [CrossRef]
- Wang, L.; Du, H.; Wu, C.; Li, H. New Compensation for Fuzzy Static Output-Feedback Control of Nonlinear Networked Discrete-Time Systems. Signal Process. 2016, 120, 255–265. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Xu, S.; Lam, J. Robust Control and Filtering of Singular Systems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Petersen, I. A stabilization algorithm for a class of uncertain linear systems. Syst. Control Lett. 1987, 8, 35–357. [Google Scholar] [CrossRef]
- Park, P.; Ko, J.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Wu, Z.; Shi, P.; Su, H.; Chu, J. Delay-dependent stability analysis for discrete-time singular Markovian jump systems with time-varying delay. Int. J. Syst. Sci. 2012, 43, 2095–2106. [Google Scholar] [CrossRef]
- Tuan, H.; Apkarian, P.; Narikiyo, T.; Yamamoto, Y. Parameterized linear matrix inequality techniques in fuzzy control system design. IEEE Trans. Fuzzy Syst. 2001, 9, 324–332. [Google Scholar] [CrossRef] [Green Version]
- Ghaoui, L.E.; Oustry, F.; Ait-Rami, R. A cone complementarity linearization algorithm for static output-feedback and related problems. IEEE Trans. Autom. Control 1997, 42, 1171–1176. [Google Scholar] [CrossRef] [Green Version]
- Chang, J.L.; Lin, M.L. Observer-Based robust H∞ control for fuzzy systems using two-step procedure. IEEE Trans. Fuzzy Syst. 2004, 12, 350–359. [Google Scholar]
- Sakthivel, R.; Sundareswari, K.; Mathiyalagan, K.; Santra, S. Reliable H∞ Stabilization of Fuzzy Systems with Random Delay Via Nonlinear Retarded Control. Circuits Syst. Signal Process. 2016, 35, 1123–1145. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jerbi, H.; Kchaou, M.; Boudjemline, A.; Regaieg, M.A.; Ben Aoun, S.; Kouzou, A.L. H∞ and Passive Fuzzy Control for Non-Linear Descriptor Systems with Time-Varying Delay and Sensor Faults. Mathematics 2021, 9, 2203. https://doi.org/10.3390/math9182203
Jerbi H, Kchaou M, Boudjemline A, Regaieg MA, Ben Aoun S, Kouzou AL. H∞ and Passive Fuzzy Control for Non-Linear Descriptor Systems with Time-Varying Delay and Sensor Faults. Mathematics. 2021; 9(18):2203. https://doi.org/10.3390/math9182203
Chicago/Turabian StyleJerbi, Houssem, Mourad Kchaou, Attia Boudjemline, Mohamed Amin Regaieg, Sondes Ben Aoun, and Ahmed Lakhdar Kouzou. 2021. "H∞ and Passive Fuzzy Control for Non-Linear Descriptor Systems with Time-Varying Delay and Sensor Faults" Mathematics 9, no. 18: 2203. https://doi.org/10.3390/math9182203
APA StyleJerbi, H., Kchaou, M., Boudjemline, A., Regaieg, M. A., Ben Aoun, S., & Kouzou, A. L. (2021). H∞ and Passive Fuzzy Control for Non-Linear Descriptor Systems with Time-Varying Delay and Sensor Faults. Mathematics, 9(18), 2203. https://doi.org/10.3390/math9182203