1. Introduction: Motivations, Shape Recognition Problem, and Overview of Results
Real-life objects are often represented by unstructured point clouds obtained by laser range scanning or by selecting salient or feature points in images [
1]. Point clouds are easy to store and can be used as primitives for visualization [
2]. The above advantages strongly motivate the problem of comparing and classifying unstructured point clouds.
Rigid objects are naturally studied up to rigid motion or isometry (including reflections), which is any map that preserves inter-point distances. The recognition of point clouds of the same number of points is practically solved by the histogram of all pairwise distances, which is a complete isometry invariant in general position [
3].
Real shapes are often given in a distorted form because of noisy measurements, when points are perturbed, missed or accidentally added. One of the first approaches to recognize nearly identical point clouds
of different sizes in the same metric space, for example, in
, is to use the
Hausdorff distance [
4]
such that the first cloud
A is covered by
B
However, we also need to take into account infinitely many potential isometries of the ambient space
. The exact computation of
minimized over isometries
f of
has a high polynomial complexity already for dimension
[
5]. An approximate algorithm is cubic in the number of points for
[
6].
This paper extends the 12-page conference version [
7], which introduced the new invariant mergegram but did not prove its continuity under perturbations. In addition to the proof of continuity, another contribution is Theorem 2 showing how to reconstruct a dendrogram of single-linkage clustering from a mergegram in general position.
The practical novelty is the harder recognition problem including perturbations of isometries within wider classes of affine and projective maps motivated by computer vision applications. Indeed, different positions of cameras produce projectively equivalent images of the same rigid shape. The new experiments in
Section 6 extensively compared several approaches on 15,000 clouds obtained from real images; see examples in
Figure 1.
Problem 1 (isometry shape recognition under noise). Find an isometry invariant of point clouds in that is (a) independent of a cloud size, (b) provably continuous under perturbations of a cloud, (c) computable in a near linear time in the size of a cloud, and (d) more efficient for recognizing isometry classes of clouds than past invariants.
The key contributions are Theorems 2 and 3 and the experiments in
Section 6 showing that the mergegram achieves a state-of-the-art recognition on substantially distorted images.
2. Related Work on Isometry Shape Recognition and Topological Data Analysis
For the isometry classification of clouds consisting of the same number of points, the easiest invariant is the distribution of all pairwise distances, whose completeness (or injectivity) was proved for all point clouds in general (non-singular) position in
[
3].
Fixed point clouds
of different sizes can be pairwisely compared by the
Hausdorff distance [
4]
, where
is the (Euclidean or another) distance from a point
to the cloud
B.
The rigid shape recognition problem for non-fixed clouds
is harder because of infinitely many potential isometries that can match
exactly or approximately. Partial cases of this problem were studied for clouds representing surfaces [
10] and when two clouds have a given isometric matching of one pair of points [
11]. Shape Google by Ovsjanikov et al. practically extends these ideas to non-rigid shape recognition [
12].
The most general framework for the isometry shape recognition of point cloud data was proposed by Mémoi and Sapiro [
13]. They studied the Gromov-Hausdorff distance
minimized over all isometric embeddings
and
of given point clouds into a metric space
M. Since the above definitions involve even more minimizations over infinitely many maps and spaces,
can be only approximated. The Farthest Point Sampling (FPS) has a quadratic complexity in the number of points (Reference [
13], Section 3.6) and was successfully tested on small clouds.
The proposed invariant mergegram extends the 0-dimensional persistence in the area of Topological Data Analysis (TDA), which grew from the theory of size functions [
14]. TDA views a point cloud
not by fixing any distance threshold but across all scales
s, for example, by blurring given points of
A to balls of a variable radius
s. The evolution of this growing union of balls is summarized by a persistence diagram, which is invariant under isometries of
. TDA can be combined with machine learning and statistical tools due to stability under noise, which was first proved by Cohen-Steiner et al. [
15] and then extended to a very general form by Chazal et al. [
16].
In dimension 0 the persistence diagram for distance-based filtrations of a point cloud A consists of the pairs , where values of s are distance scales at which subsets of A merge by the single-linkage clustering. These scales equal half-lengths of edges in a Minimum Spanning Tree . If distances between all points of A are known, is a connected graph with the vertex set A and a minimal total length.
Representing a point cloud A by loses a lot of geometry of A, but gains stability under perturbations, which can be expressed in the case of point clouds as . Here, the bottleneck distance between diagrams is defined as a minimum such that all pairs of can be bijectively matched to PD(B) (s,s) -closeness of pairs and in is measured in the distance .
The
mergegram extends
to a stronger invariant, whose stability under perturbations in the above sense is proved in
Section 5 for the first time. The idea of a mergegram is related to the Reeb graph [
17] or the merge tree [
18] for the sublevel set filtration of a scalar function. The mergegram
is defined at a more abstract level for any clustering dendrogram, which opens a possibility to extend a Homologically Persistent Skeleton (HoPeS) visualizing most persistent cycles in point clouds [
19].
Since any persistence diagram and a mergegram are unordered collections of pairs, the experiments in
Section 6 use the neural network PersLay [
20], whose output is invariant under permutations of input points by design. PersLay extends the neural network DeepSet [
21] and introduces new layers to accept as an input any diagram of unordered points. In other related work, deep learning was recently applied to outputs of hierarchical clustering [
22,
23,
24] and to 0-dimensional persistence [
25,
26].
3. Single-Linkage Clustering and the Invariant Mergegram of a Dendrogram
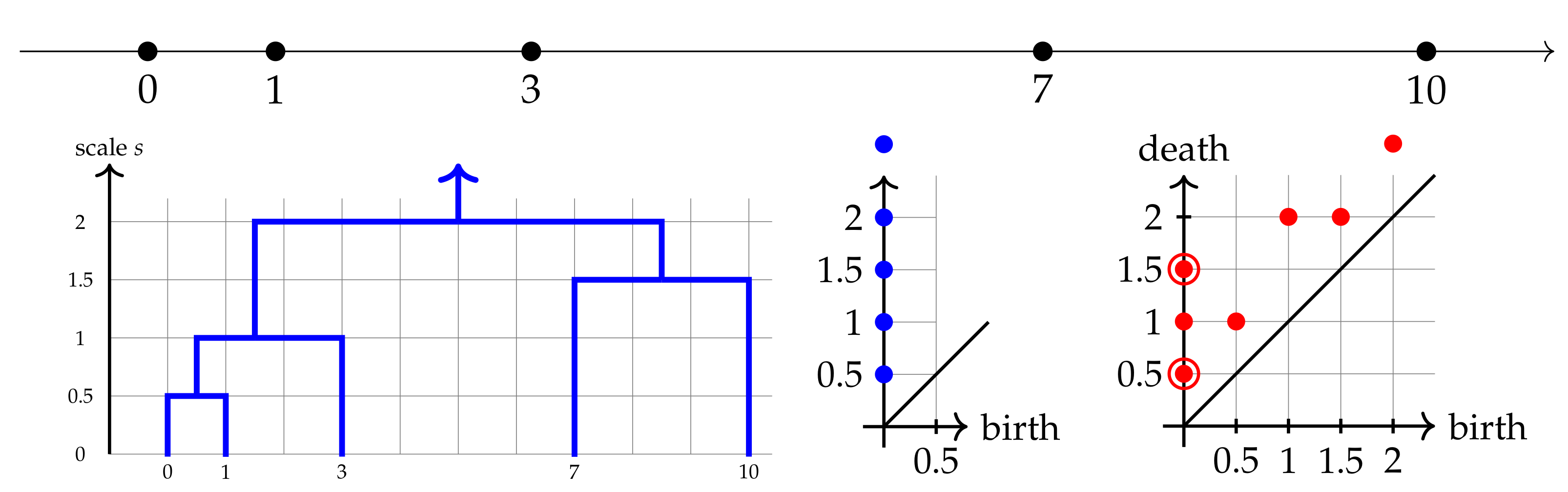
Example 1. Figure 2 illustrates the key concepts before formal Definitions 1, 3 and 4 for the point cloud in the real line . Imagine that we gradually blur original data points by growing disks of the same radius s around the given points. The disks of the closest points
start overlapping at the scale
when these points merge into one cluster
. This merger is shown by blue arcs joined at the node at
in the single-linkage dendrogram; see the left picture at the bottom of
Figure 2. The persistence diagram
in the middle picture at the bottom of
Figure 2 represents this merger by the pair
, meaning that a singleton cluster of (say) point 1 was born at the scale
and then died later at
by merging into another cluster of point 0.
When clusters
and
merge at
, this merger was earlier encoded in the persistence diagram by the single pair
, meaning that one cluster inherited from (say) point 7 was born at
and died at
. The new mergegram in the bottom right picture of
Figure 2 represents the above merger by the following two pairs. The pair
means that the cluster
is merging at the current scale
and was previously formed at the smaller scale
. The pair
means that another cluster
is merging at the scale
and was previously formed at
.
The 0D persistence diagram represents the cluster of the whole cloud A by the pair because A was inherited from a singleton cluster starting from . The mergegram represents the same cluster A by the pair because A was formed during the last merger of and at and continues to live as .
In the above dendrogram, every vertical arc going up from a scale
b to
d contributes one pair
to the mergegram. So, both singleton clusters
,
merging at
contribute one pair
of multiplicity two, shown by two red circles in
Figure 2.
Definition 1 (single-linkage clustering)
. Let A be a finite set in a metric space X with a distance . For a distance threshold, which can be called a scale s, any points should belong to oneSL cluster
if and only if there is a finite sequence such that any two successive points have a distance at most s, so for . Let be the set of all single-linkage clusters at the scale s. For , any point forms a singleton cluster . Representing each cluster from over all by one point gives thesingle-linkage dendrogram
visualizing how clusters merge; see the first picture at the bottom of Figure 2. For any , all SL clusters can be obtained as connected components of a Minimum Spanning Tree by removing all edges longer than s.
Definition 2 (partition set ). For any set A, apartitionof A is a finite set of disjoint non-empty subsets , whose union is A. The single set A forms thesingle-blockpartition of A. Thepartition set consists of all partitions of A.
The partition set
of the abstract set
consists of the five partitions
For example, the collections and are not partitions of A.
Definition 3 below extends a dendrogram from (Reference [
27], Section 3.1) to arbitrary (possibly, infinite) sets
A. Every partition of
A is finite by Definition 2. So, there is no need to add that an initial partition of
A is finite. Hence, non-singleton sets are now allowed.
Definition 3 (dendrogram of merge sets). A dendrogram Δ over any set A is a function of a scale satisfying the following conditions.
(a) There exists a scale such that is the single block partition for .
(b) If , then refines , so any set from is a subset of some set from . These inclusions of subsets of X induce the natural map .
(c) There are finitely many merge scales such that Since is not an identity map, there is a subset , whose preimage consists of at least two subsets from . This subset is a merge set with the birth scale . All sets of are merge sets at the birth scale 0. The is the interval from its birth scale to its death scale .
Dendrograms are often drawn as trees whose nodes represent all sets from the partitions
at merge scales. Edges of such a tree connect any set
with its preimages under
.
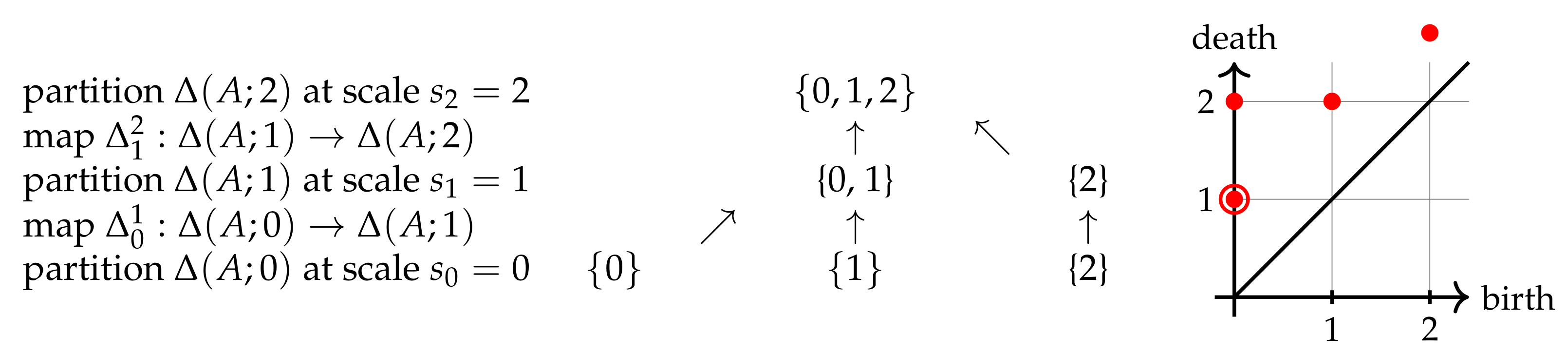
Figure 3 shows
for
.
In
Figure 3, the partition
consists of
and
. The maps
induced by inclusions respect the compositions in the sense that
for any
. For example,
and
, so
is a well-defined map from the partition
of 3 singleton sets to
but is not an identity.
At the scale the merge sets have , the merge set has . At the scale the single merge set has . At the scale the single merge set has . The first (Greek) letter in the word ‘dendrogram’ and a -shape of a typical tree motivate the notation .
Condition (Definition 3 (a)) says that a partition of a set X is trivial for all large scales. Condition (Definition 3 (b)) means that, if the scale s is increasing, any sets from a partition can merge but cannot split into smaller sets. Condition (Definition 3 (c)) implies that there are only finitely many mergers, when two or more subsets of X merge into a larger merge set.
Lemma 1 ([
7], Lemma 3.3)
. Given a metric space and a finite set , the single-linkage dendrogram from Definition 1 satisfies Definition 3. A mergegram represents life spans of merge sets by pairs .
Definition 4 (mergegram ). The mergegram of a dendrogram Δ has the pair for each merge set B of Δ with . If any life interval appears k times, the pair (birth,death) has the multiplicity k in .
If our input is a point cloud A in a metric space, then the mergegram is an isometry invariant of A because depends only on inter-point distances. Though as any dendrogram is unstable under perturbations of points, the key advantage of is its stability, which will be proved in Theorem 4.
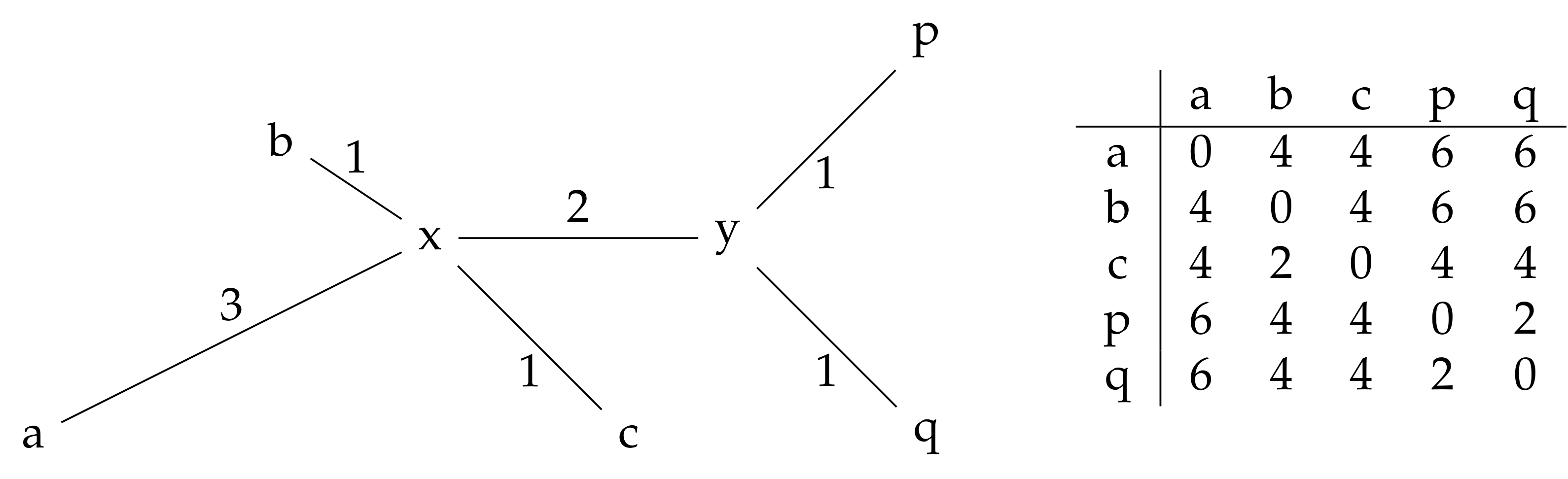
Figure 4 shows the metric space
with distances defined by the shortest path metric induced by the specified edge-lengths; see the distance matrix.
The dendrogram
in the first picture of
Figure 5 leads to the mergegram as follows:
each of the 1-point sets , , , has pair (0, 1), so its multiplicity is 4;
each of the merge sets and has the pair (1,2), so its multiplicity is 2;
the singleton set has the pair ; the merge set has the pair (2, 3);
the full set continues to leave up to , hence having the pair .
4. Explicit Relations between 0-Dimensional Persistence and Mergegram
This section recalls the concept of persistence and then shows how any 0D persistence and dendrogram in general position can be reconstructed from a mergegram.
Definition 5 (persistence module ). A persistence module over the real numbers is a collection of vector spaces , with linear maps , such that is the identity on , and the composition is respected: for any .
The set of real numbers can be considered as a category
in the following sense. The objects of
are all real numbers. Any real numbers
define a single morphism
. The composition of morphisms
and
is the morphism
. In the language of category theory, a persistence module is a functor from
to the category of vector spaces. A basic example of a persistence module
is an interval module. An interval
J between points
in
can be one of the following types: closed
, open
, half-open or half-closed
and
, all encoded as follows:
The endpoints can have the infinite values , but without superscripts.
Example 2 (interval module
)
. Let be an interval. The interval module is the persistence module defined by the following vector spaces and linear maps The direct sum of persistence modules is defined as the persistence module with the vector spaces and linear maps .
We illustrate the abstract concepts above by geometric constructions. Let be a continuous function on a topological space. The sublevel sets form nested subspaces for any . The inclusions of the sublevel sets respect compositions similarly to a dendrogram in Definition 3. On a metric space X with a metric , a typical example of a function is the distance to a finite subset . For any point , let be the distance from p to a closest point of A. For any , the preimage is the union of closed balls with radius r and centers at all points . For example, and .
Any continuous function induces the inclusion for any parameters . Then, all sublevel sets form a nested sequence of subspaces within X. The above construction of a filtration can be considered as a functor from to the category of topological spaces. Below, we discuss the simplest case of dimension 0.
Example 3 (persistent homology). For any topological space X, the 0-dimensional homology is the vector space (with coefficients ) generated by all connected components of X. Let be any filtration of nested spaces, e.g., sublevel sets based on a continuous function . The inclusions for induce the linear maps between homology groups and define thepersistent homology, which satisfies the conditions of a persistence module from Definition 5.
If X is a finite set of m points, then is the direct sum of m copies of .
The persistence modules that are decomposable as direct sums of interval modules can be described in a simple combinatorial way by persistence diagrams in .
Definition 6 (persistence diagram ). Let a persistence module be decomposed as a direct sum of interval modules : , where * is + or −. The persistence diagram is the multiset .
The 0-dimensional persistence diagram of a topological space X with a continuous function is denoted by . Lemma 2 will prove that the merge module of any dendrogram is decomposable into interval modules. The mergegram will be interpreted as the persistence diagram of .
The following result describes how the persistence diagram of the distance-based filtration of any point cloud A can be obtained from the mergegram .
Theorem 1 ([
7], Theorem 5.3)
. For any finite set A in a metric space , let be the distance to A. Let the mergegram be a multiset , where some pairs can be repeated. Then, the persistence diagram is the difference of the multisets containing each pair exactly times, where is the number of births , and is the number of deaths . All trivial pairs are ignored, and, alternatively, we take only with . Theorem 1 is illustrated by Example 1, where
has the diagram
obtained from the mergegram
as follows: one pair
comes from two deaths and one birth
in
. Similarly, each of the pairs
comes from two deaths and one birth equal to the same scale
s. The cloud
in Reference [
7] (Example 1.1) has exactly the same
but different
. This example jointly with Theorem 1 justify that the mergegram is strictly stronger than 0D persistence as an isometry invariant of a point cloud.
The New Reconstruction Theorem 2 below can be contrasted with the weakness of 0D persistence
consisting of only pairs
whose finite deaths are half-lengths of edges in a Minimum Spanning Tree
. In Example 1, these scales
are insufficient to reconstruct the SL dendrogram in
Figure 2. Such a unique reconstruction is possible by using the richer invariant mergegram as follows.
Theorem 2 (from a mergegram to a dendrogram). Let A be a finite point cloud in general position in the sense that all merge scales of A in a dendrogram Δ from Definition 3 are different. Then, the dendrogram Δ can be reconstructed from its mergegram , uniquely up to a permutation of nodes in Δ at scale .
Proof. Consider all merge scales one by one in the increasing order starting from the smallest. The general position implies that only two clusters merge at any merge scale. For any current scale s, the mergegram contains exactly two pairs and .
For a smallest merge scale , the births should be . We start drawing a dendrogram by merging any two points of A at this smallest scale s. To realize a merger at any larger s, we should select two clusters representing and .
If , then we take any of the unmerged points of A. If , then the already constructed dendrogram should contain a unique non-singleton cluster determined by the scale . Hence, at any merge scale s, we know how to select two clusters to merge. The only choice comes from choosing points of A or permuting notes of . □
Following the above proof of Theorem 2 for the cloud in Example 1, the first two pairs indicate that we should merge two points of A at . The scale uniquely determines this 2-point cluster.
The next two pairs mean that the above cluster born at should merge at with a singleton cluster (any free point of A). The resulting 3-point cluster is uniquely determined by its merge scale . The further two pairs say that a new 2-point cluster is formed at by the two remaining points of A.
The final pairs
tell us to merge at
the two clusters formed earlier at
and
. The resulting dendrogram
has the expected combinatorial structure as in
Figure 2, though we can draw
in another way by permuting points of
A.
5. Stability of the Mergegram for Any Single-Linkage Dendrogram
This section fully proves the stability of a mergegram, which was stated in Reference [
7] (Theorem 7.4), without proving key Lemmas 2 and 3. For simplicity, we consider vector spaces with coefficients only in
, which can be replaced by any field.
Definition 7 introduces homomorphisms between persistence modules, which are needed to state the stability of persistence diagrams under perturbations of a function . This result will imply a stability for the mergegram for the dendrogram of the single-linkage clustering of a set .
Definition 7 (a homomorphism between persistence modules). Let and be persistent modules over . A homomorphism of a degree consists of linear maps , , such that the diagram below commutes for all .
Let be all homomorphisms of degree δ. Persistence modules areisomorphicif there are inverse homomorphisms of degree 0.
For a persistence module with maps , the simplest example of a homomorphism of a degree is defined by the maps , . So, defining the structure of shift all vector spaces by the difference .
Interleaved modules defined below algebraically generalize a geometric perturbation of a set X in terms of (the homology of) its sublevel sets .
Definition 8 (interleaving distance ID). Persistence modules and are called δ-interleaved if there are homomorphisms and such that . The interleaving distance between the persistence modules and is
If
are continuous functions such that
in the
-distance, the modules
,
are
-interleaved for any
k [
15]. The last conclusion extends to persistence diagrams for the bottleneck distance below.
Definition 9 (bottleneck distance BD). Let be multisets of finitely many points , , of finite multiplicity and all diagonal points of infinite multiplicity. For , a δ-matching is a bijection such that in the -distance for any point . Thebottleneckdistance between modules is defined as .
Historically, stability of persistence for sequences of sublevel sets was extended as Theorem 3 to
q-tame persistence modules. A persistence module
is
q-tame if any non-diagonal square in the persistence diagram
contains only finitely many of points; see Reference [
16] (Section 2.8). Any finitely decomposable persistence module is
q-tame.
Theorem 3 (stability of persistence modules [
16], isometry Theorem 4.11)
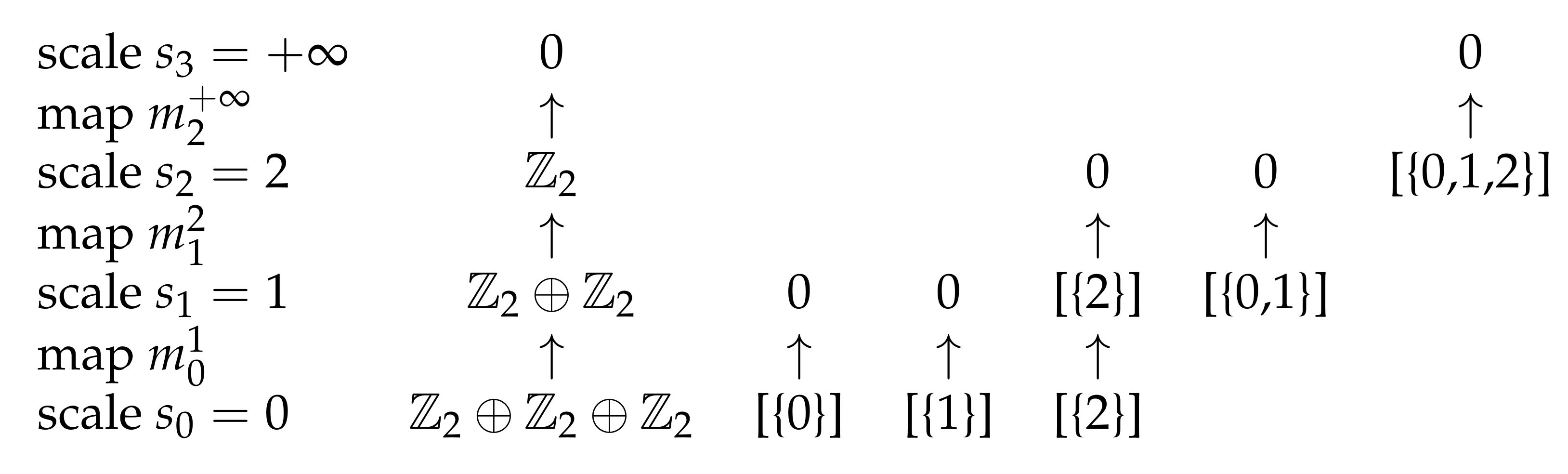
. Let and be q-tame persistence modules. Then, , where is the interleaving distance, and is the bottleneck distance between persistence modules. Definition 10 (merge module
)
. For any dendrogam Δ on a finite set X, the merge module consists of the vector spaces , , and linear maps , . For any and , the space has the generator or a basis vector . For and any set , if the image of A under coincides with , so , then , else , see Figure 6. In a dendrogram from Definition 3, any merge set A of has from its birth scale b to its death scale d. Lemmas 2 and 3 are proved for the first time.
Lemma 2 (merge module decomposition). For any dendrogram Δ from Definition 3, the merge module decomposes over all merge sets A.
Proof (Proof of Lemma 2)
. The goal is to prove that
. Recall that the interval module
consists of only vector spaces 0 and
. For a scale
r, let
be its vector space, whose generator is denoted by
. Define
We will first prove that
is well-defined. If
then
. We know that
is generated by elements
for which
. Thus, the compositions satisfy
and
. It remains to prove that morphisms correctly behave under the functors
. The proofs for both cases are essentially the same; thus, we will prove it only for
. The goal is to prove that the following diagram commutes:

Here,
is the direct sum of the corresponding maps of interval modules
. Let
be an arbitrary generator of
. There are two possibilities how
can map
. If
, then
and by definition
Since both
, we also have that
Assume now that . Then, ; thus, . On the other hand, . Since , we get . □
Lemma 3 (interleaving of merge modules). If subsets of a metric space have , then the merge modules , are δ-interleaved.
Proof (Proof of Lemma 3). The equality means that A is covered by the union of closed balls that have the radius and centers at all points . This union is the preimage is , i.e., . Extending the distance values by , we get and similarly .
Let
U be an arbitrary set in
. Define map
Symmetrically, for any
, we define
In the notation above,
is the
in the dendrogram
. If
for all values
t, then
. By symmetry, it is enough to prove that the following diagrams commute:

We note first that, if , then .
We begin by proving commutativity of the first diagram. Let U be arbitrary element of . If then . If or then we are done. Since , it follows that . Thus, , with given assumptions, the diagram commutes.
Assume now that . Then, both . In the last case, we assume that and . In this case, obviously, ; thus, .
For the second diagram, assume now that . Assume first that , then and .
Assume then that . Now, the outcome of both maps and depends on whether ; thus, . Since all the diagrams commute, the required conclusion follows. □
Theorem 4 (stability of a mergegram). The mergegrams of any finite point clouds in a metric space satisfy . Hence, any small perturbation of a cloud A in the Hausdorff distance leads to a similarly small perturbation in the bottleneck distance for its mergegram .
Proof. The given clouds with have -interleaved merge modules by Lemma 3, so . Since any merge module is finitely decomposable, hence, it is q-tame by Lemma 2. The corresponding mergegram satisfies Theorem 3, so . □
Figure 7 illustrates Theorem 4 on a cloud and its perturbation by showing their close mergegrams. The more extensive experiment on 100 clouds in Reference [
7] (
Figure 8) similarly confirms that the mergegram is perturbed within expected bounds. The computational complexity of the mergegram
was proved to be near linear in the number
n of points in a cloud
; see Reference [
7] (Theorem 8.2). The results above justify that the invariant mergegram satisfies conditions (a,b,c) of Isometry Recognition Problem 1.
6. New Experiments on Isometry Recognition of Substantially Distorted Real Shapes
This section fulfills final condition (d) of Problem 1 by experimentally comparing the mergegram with 0D persistence and distributions of distances to neighbors on 15,000 clouds. The earlier paper by Reference [
7] did experiments only on randomly generated clouds.
We considered 15 classes of shapes represented by black and white images of mythical creatures [
9]; see
Figure 1. These shapes were chosen to make the shape recognition problem really challenging. Indeed, similar creatures from this dataset are represented by slightly different shapes, which can be hard to isometrically distinguish from each other. For example, several images of a horse include only minor differentiating features, such as a saddle or a different tails, which makes horses nearly identical.
Shape generation. For each image, we generated 1000 perturbed images by affine and projective transformations to get 15,000 distorted shapes split into 15 classes.
First, we rotated each image around its central point by an angle generated uniformly in the interval using the function cv::rotate from the OpenCV library. If needed, we extended the resulting image to fit all black pixels of the rotated shape into a bounding box. Then, both affine and projective transformations distort each image by using a noise parameter such that the value represents the identity transformation.
Figure 8 illustrates how an original image is randomly rotated, and then randomly distorted by affine or projective transformations, depending on the noise parameter
.
Affine transformations are implemented as compositions of the already applied rotations above and the function cv::resize() from the OpenCV library. This function scales an image of size by horizontal and vertical factors sampled as follows.
Uniform noise: , have uniform distributions.
Gaussian noise: and have Gaussian distributions with mean 1 and standard variance , truncated to positive numbers.
Projective transformation are implemented as compositions of the already applied rotations above and the OpenCV function cv::getPerspectiveTransform() function, which is parametrized by 4-dimensional array
consisting of points
,
. This function maps the corners of the image as follows:
The projective transformation of the rectangle is uniquely determined by the above corners. The above points are randomly sampled by using a noise parameter .
Uniform noise: each coordinate has a uniform distribution with a noise parameter
Gaussian noise: each coordinate has a Gaussian distribution truncated to the image
Point cloud extraction. For each distorted image, we extract classical Harris point corners [
28] due to their simplicity; see the red points in
Figure 8. For detecting corner points, the OpenCV function cv::cornerHarris was used with the parameters blockSize = 3, apertureSize = 5,
k = 0.04, thresh = 120. However, one can use any reliable algorithms, such as FAST [
29] or scale-invariant feature transform (SIFT) [
30].
After describing the available point cloud data above, we specify condition (d) of Isometry Recognition Problem 1 in the context of supervised machine learning.
Problem 2 (experimental recognition). Given a labeled dataset split into classes of similar but projectively distorted shapes, develop a learning tool to recognize a class of distorted shapes with a highrecognition rate(percentage of correctly recognized classes).
Since all isometry invariants are independent of point ordering, the most suitable neural network is PersLay [
20], whose output is invariant under permutations by design. Each layer is a combination of a coefficient layer
, a transformation
and a permutation invariant layer op combined as follows
Coordinates of all input points are linearly normalized to . We have used the following parameters of the PersLay network for all experiments below.
The max layer consists of the following functions.
The coefficient layer is the weight , where k is a trainable scalar, and the dimension is typically .
The transformation layer is the function , where , are trainable matrices, is a trainable vector, and maxpool returns a maximum value for every .
The operational layer
puts all coordinates in increasing order and composes the result with standard densely connected layer [
31]
.
An output is a vector in for of image classes. A final prediction is obtained by choosing a class with a largest coordinate in the output vector.
The image layer for integer parameters and a multiset of points in the unit square consists of the following functions.
The coefficient layer
is a piecewise constant function trained on
parameters, defined on the unit square partition
Let be the Gaussian distribution centered at with a trainable standard deviation . The transformation layer consists of functions , where p runs over all centroids of the partition .
The operation layer op takes the sum over the given point cloud. A final prediction is made by composing the operation layer with the Dense layer.
Finally, the PersLay network used the optimizer tf.keras.adam with the standard learning rate 0.01 and 150 epochs, the loss function SparseCategoricalCrossEntropy, the 80:20 of training and testing, a 5-fold Monte Carlo cross validation for each run.
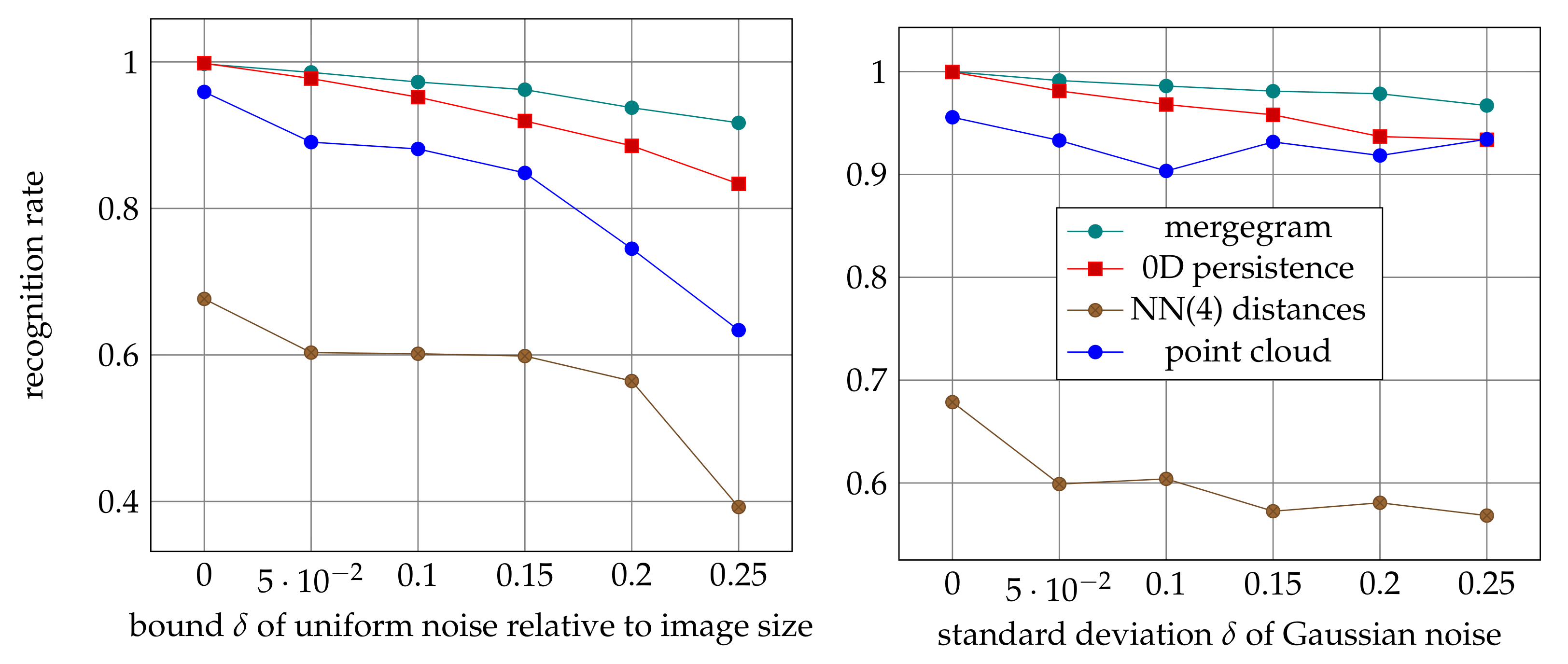
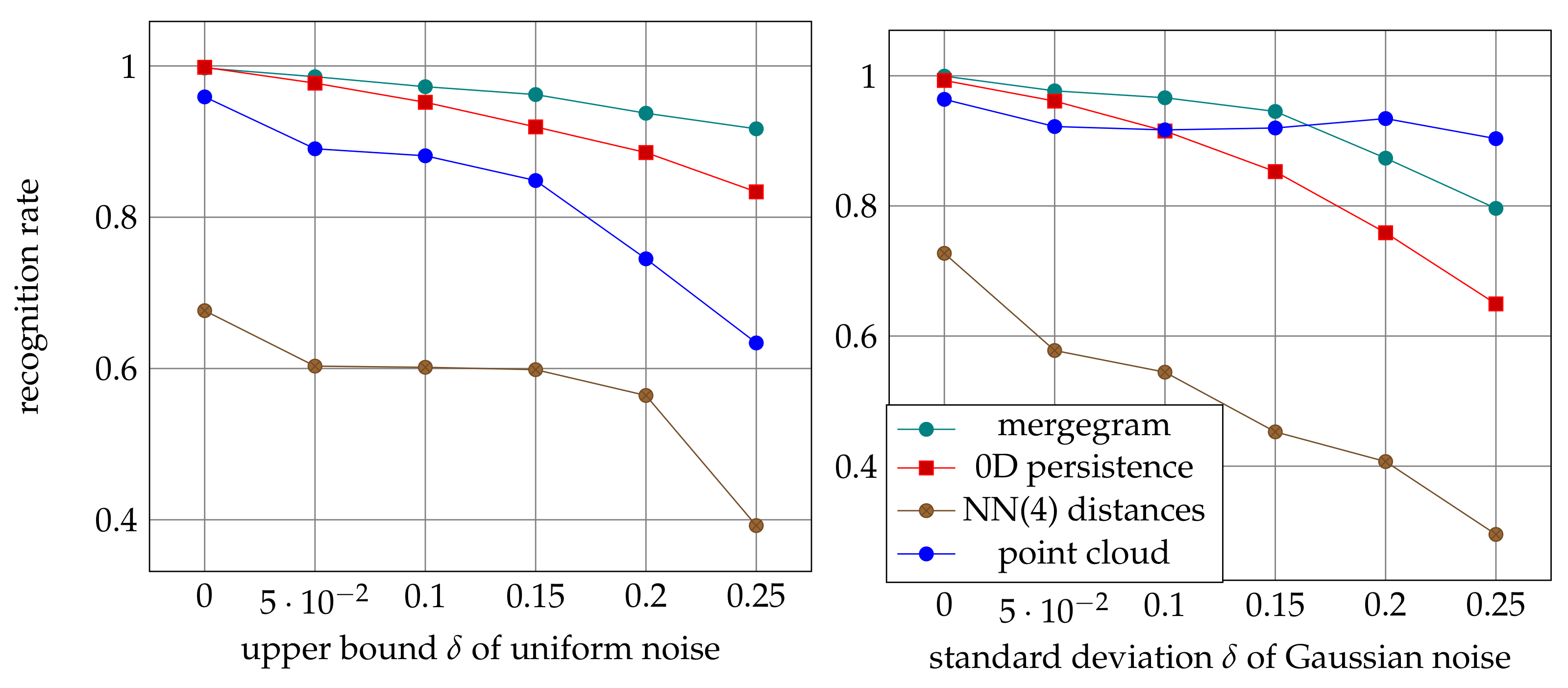
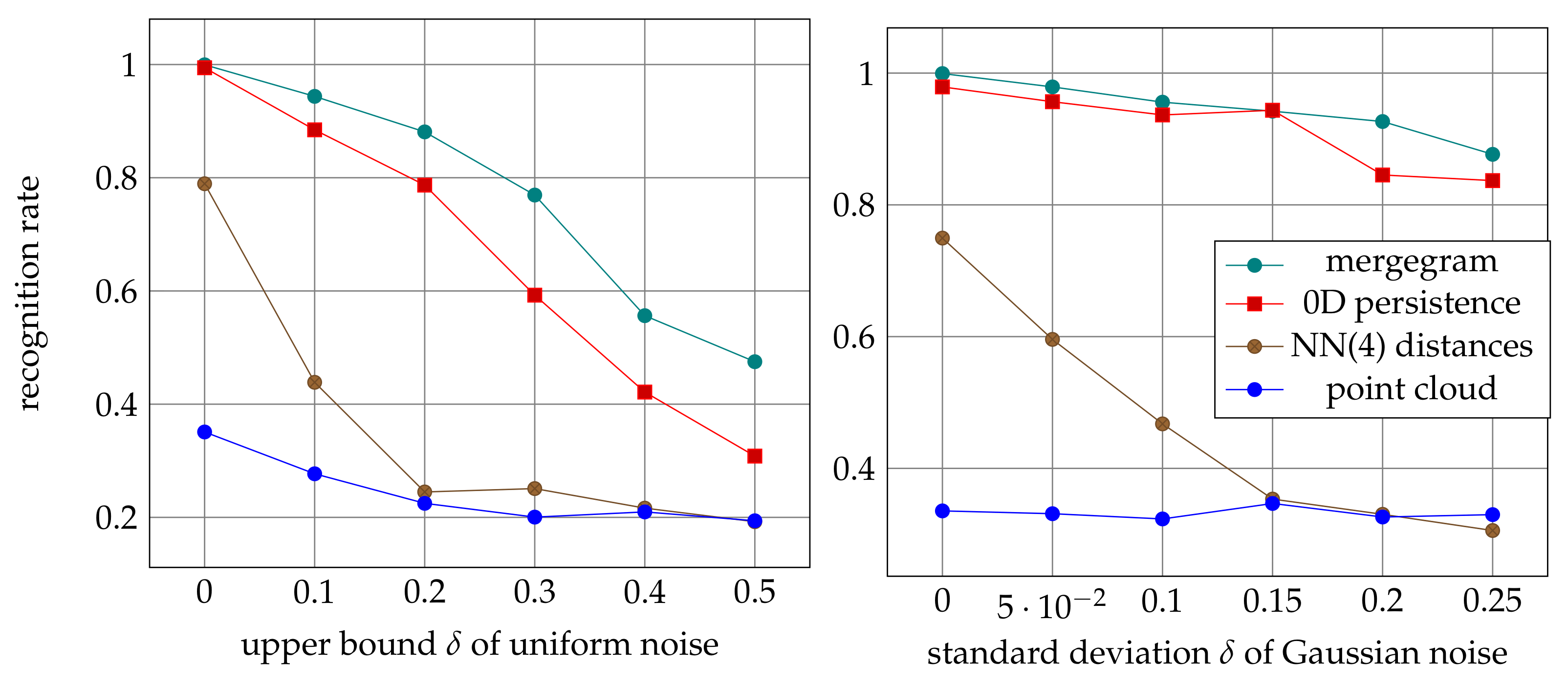
Figure 9,
Figure 10 and
Figure 11 show that the mergegram
consistently outperforms two other isometry invariants: 0D persistence and the multiset
consisting of 4-tuple distances to neighbors per given point. The simpler multiset
performed worse. A given cloud
was considered as a baseline input. The noise factors
reached 25%, which means that original images were distorted up to a quarter of image sizes.
7. A Discussion of Novel Contributions and Further Open Problems
This paper has further demonstrated that the provably stable-under-noise invariant mergegram of a dendrogram is a fast and efficient tool in the challenging problem of isometry shape recognition, especially for substantially distorted images.
In comparison with the conference version [
7],
Section 4 proved new Theorem 2 describing how to reconstruct a single-linkage dendrogram in general position from its much simpler mergegram. It is hard to define a continuous metric between dendrograms, especially because they can be unstable under perturbations. Theorem 2 allows us to measure a continuous similarity between dendrograms in general position as the bottleneck distance between their unique mergegrams. This distance can be computed in time
[
32] for diagrams consisting of at most
n points.
Section 5 provided a full proof of stability of the mergegram under perturbations of points, while the earlier paper by Reference [
7] only announced this result without proving highly non-trivial Lemmas 2 and 3, which required a heavy algebraic machinery.
In addition to Example 1 and Theorem 1 showing that the mergegram is stronger than 0D persistence, its strength is confirmed by the new experiments on 15,000 point samples from substantially distorted real shapes. In
Figure 9,
Figure 10 and
Figure 11, the mergegram outperformed other isometry invariants. Since the distribution
of distances to two closest neighbors per point performed badly, we have tried distances to four nearest neighbors, but this
performed worse than the original cloud because of noise.
For very high levels of 20% and 25% distortions in projective transformations, the PersLay network trained on a point cloud achieved high recognition rates because we have extensively tried many parameters in the layers MAX(75) and Im[20,20] for a best trade-off between accuracy and speed. The C++ code for the mergegram is at Reference [
7].
The recent stronger invariants are Pointwise Distance Distributions [
33]. Their generic completeness under isometry holds in a more challenging setting of periodic point sets [
34,
35,
36,
37,
38].




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













