1. Introduction
The model of ideal gas dynamics is studed very good [
1,
2,
3]. The numerical and analytical methods for solving of the boundary value problems were developed [
4,
5]. The methods of symmetry (group) analysis were developed for the testing of calculations and detecting new singularities of gas motions [
6,
7]. The classical results for the plane steady potential flows [
2,
3,
8] were generalized on the vortex isentropic motions [
9,
10].
As a rule it is not proved the existence and uniqueness of the classical smooth solution as the whole for nonlinear space boundary value problems of the mechanic medium. For the numerical and asymptotic solutions the same it is not proved convergence to the classical solutions of the boundary value problems. Therefore it is value to know possibly more the exact solutions in the enough big domain of space-time continuum. For the classes of exact solutions it is possible more simple submodels. The group analysis makes the classification of these submodels.
In the present paper we consider the mathematical submodel of plane steady vortex flows of the ideal gas with verying entropy for an arbitrary state equation, arbitrary values of the Bernoulli, entropy, vorticity integrals that combined into one arbitrary element. The equivalent transformations of the submodel was obtained by the group analysis methods [
1,
11,
12,
13]. They change only arbitrary element. It was proved the existence of 8 types of the group classification models with differing symmetries. The optimal systems of dissimilar subalgebras admitted by models were constructed. In the fact its give the classification of submodels. The subalgebras produce invariant, partial invariant and differential invariant solutions. The invariant solutions show singularities in the submodel solutions. So it is proved the existence of the plane point source or the sink for vortex entropy steady invariant gas motions in contrast to the plane isentropic potential invariant solution. The example of a regular partial invariant solution was considered on the 2-dimension subalgebra.
2. Steady 2-Dimension Submodel and Equivalent Transformations
We consider the gas dynamics equations [
8]
where
is a velocity,
is a state equation,
p is a pressure,
is a density,
is a inner energy,
S is an entropy,
T is a temperature,
V is a specific volume are invariant with respect to the translations by time
t, by space
, Galilean translations (motion of the origin of coordinates with a constant velocity), the rotations and the proportional dilatation by
t and
. These transformations form 11-parameter group [
1]. We consider the invariant motions with respect to the translations by
t and
z in the Cartesian coordinate system
. The invariant steady plane submodel is [
2,
3,
8].
The stream function
is introduced by the last equation of the system (
1)
With the enthalpy
,
the system (
1) has 3 integrals (Bernoulli, entropy and the third component of the velocity)
One equation remains from the system (
1)
which with the help of (
2) may be written in the form
From this it follows the 4th integral which together with the Bernoulli integral form the submodel equations
where
is an arbitrary element expressing through the state equation and arbitrary functions of the integrals
.
The velocity curl of the invariant submodel with the help of (
2) is equal to
The value
by virtue of (
3) is equal to
and from (
1) and (
2) satisfy the equation
From here we obtain the vorticity integral
Two expressions for K differ on the linear summand by
For isentropic flow the vortex motions was considered in [
9,
10]. Then the vortex motions with varying entropy will be considered.
For an abitrary element the equations are realized
The transformations of variables
no changing the form of the Equations (
3), (
5) but changing only the function
are named the equivalent transformations. These transformations form a group with Lie algebra given by the operators prolonged on the derivatives in Equations (
3), (
5) [
1,
12]:
where
The operator coordinates
are functions of variables
. The compatibility conditions of the Equations (
3), (
5) have the form [
1]
for the solutions of the Equations (
3) and (
5). This gives an overdetermined linear system of the homogeneous equations for the coordinates of the operator
Y.
Theorem 1. The Lie algebra of the equivalent transformations is infinite. The basic operator arewhere are arbitrary functions. Proof. The conditions of invariance for the Equations (
5) are
We assume that the values
are arbitrary. Hence it follows
The condition of invariance for the first equation of the system (
3) may be written in the form
The value
is proportional a value
which may be arbitrary. The equating to zero of the coefficient under
in (
6) gives
The equating to zero of the coefficients under the powers of values
(the splitting at
and
) leads to the equations
The residuals of (
6) are the polynomial of 4th power by
and
. The splitting gives
From here it follows the presentation for the coordinates of operator
Y
where
are constant.
The condition of invariance for the second equation of the system (
3) has the form
The splitting by
and
gives
and (
8) is fulfilled identically. The coordinates of operator
Y in (
7) are corrected
Here and in (
7)
are arbitrary functions,
are arbitrary constants. The basis from Theorem 1 is obtained to the equating zero all arbitrary elements except one. □
Remark 1. The transformations no changing the function form the kernel of admitting groups .
Remark 2. The transformations changing the function K have the form:
- (a)
,
- (b)
,
- (c)
,
- (d)
where and are arbitrary functions; and c are constant group parameters. If is a constant then the transformation (d) is the translation by ψIf then the transformation (d) is the dilatation
Remark 3. The reflection is admitted also.
3. The Group Classification of Submodel
The problem of the group classification consist to find arbitrary elements of the system (
3) to within the equivalent transformations for which the admitted group is more than the kernel. The operators of Lie algebra of the point transformations is written in the form prolonged on the derivatives from the Equation (
3) [
1]
where
are the operator of the full differentiation
Here the operator coordinates
are functions of the variables
. The invariance condition for the first equation of the system (
3) has the form
The splitting by the value
gives
The change
and the splitting by
and
leads to the equations
The equating to zero of the coefficients at the linear summands under
and
leads to the determining relations
The determining relations are an overdetermined system of equations for an arbitrary element. It was arbitrary if the relations are fulfilled identically for the kernel of the admitted operators. The kernel may be extended for the special functions . The equivalent transformations may be changed for special classes of arbitrary elements. Here we do not consider of the full classification.
The invariance condition for the second equation of the system (
3) with regard for the received relations has the form
Reduction of the underline summands and the equating to zero of the coefficients at
gives
From here it follows
is a constant,
where
are constants, and 2 determining relations
The last equation is integrable by
V and the system (
9) has the form
Here
is arbitrary function. The determining relations for the function
give the overdetermined system
with some functions
and a constant
C.
We must find the general solution of the system (
11) to within the equivalent transformations for different
If
then from the second equation of (
11) follows
Here the equivalent transformations (a) and (d) from subsection 1 act. From the system (
11) it is follow to within the equivalent transformation
Substitution
K into (
10) determines functions
and
:
where
N is an arbitrary constant,
is an arbitrary function.
Next we consider the case
. From (
11) it is follow
is a constant,
If
then the equivalent transformations make
. General solution of the Equation (
12) with the notation
is
for any
m and
. From corrected Equations (
10)
it follows
At
is an arbitrary function,
At and is an arbitrary function, .
Let then
If
then
is an arbitrary function,
At
the equivalent transformations make
Case
. The Equation (
12) has the form
To within the equivalent transformations we may consider , , at and at .
Substitution into (
10) gives
Here we may consider that the variables
are independent. At
it follows
,
,
At
,
is an arbitrary function,
,
,
,
In the case
from (
10) it follows
,
Hence it was possible to formulate the following statement.
Theorem 2. The system (3) with arbitrary function admits the kernel from the Theorem 1. For the special functions there are the following extensions - 1.
, , ;
- 2.
;
- 3.
;
- 4.
, , ;
- 5.
, , , ;
- 6.
, , , ;
- 7.
, , ;
- 8.
, .
4. Optimal Systems
The Lie algebras of extensions from the Theorem 2 have different dimensions and structures. For the cases
the algebra decompose into the semi-direct sum of the Abelian subalgebra
and the Abelian ideal
according to the commutators of the basic operators
The inner automorphisms in
are calculated by the rule: for each basic operator
the linear transformation is the solution of the following task
For the operator
the automorphism
is given by transformation of the operator coordinates (it is not written invariable coordinates)
The Abelian subalgebra of the decomposition (
13) has the following subalgebras
For each of these subalgebras we add the linear combination from the elements of the Abelian ideal. Some arbitrary coefficients we equate to zero by automorphisms and verify the condition of subalgebra.
We list one-dimension subalgebras to within the automorphisms. To trivial subalgebra we add the linear combination
, the automorphism
leads to the similar subalgebra
. Arbitrary subalgebra with the projection
is reduced to the projection by the superposition
. Similarly the subalgebra
is reduced to
by
and
. For 2-dimensional subalgebra one from the basic operators may be reduced to one of the listed 1-dimensional subalgebras. For a different basic operator must be realized the condition of the subalgebra: the commutator of them is the linear combination of the basic operators. For example,
From here it follows
and we obtain the Abelian subalgebra
The subalgebra
is reduced to
by the automorphism
. The condition of the subalgebra for operators
has the form
There is no such 2-dimensional subalgebras. There is subalgebra
with null projection into subspace
. There are no 3-dimensional subalgebras of the type
as the condition of the subalgebra is not realized. There are subalgebras
Hence the optimal system consists of the following dissimilar subalgebras (
is number of subalgebra,
k is subalgebra dimension,
i is the ordinal number in given dimension)
For the case
of the Theorem 2 admitted algebra is infinite. There are the inner automorphisms
. The algebra decompose into the direct sum of 2 ideals
The inner automorphisms of 3-dimensional ideal
calculate subalgebras
The commutator of operators from infinite ideal is equal to
The inner automorphism for the operator
satisfies the problem
The solution of this problem has the form
The automorphism is given by formula
where
,
is inverse function to
. Within this transformation we calculate finite subalgebras in the infinite ideal. The condition for 2-dimensional subalgebras is
From this it is follow the equation
If
then
and change of the basis leads to the subalgebra
If
then
and change of the basis leads to the subalgebra
We will obtain the 3-dimensional subalgebras using Bianchi classification of the structure over the real field [
14]. The structures must not have null commutator. From 2 unsolvable subalgebras is suitable only one with the commutator table of basic elements
If
then this structure gives the equation system
The general solution of 2 equations have the form
The substitution in third equation leads to the relation .
Thus we obtain the 3-dimensional subalgebra
The sum of the projections on the ideals gives the subalgebras
For the case
of the Theorem 2 admitted subalgebra decompose into semi-direct sum of ideal and subalgebra
The automorphisms
are the same as before, the automorphism
has complement
. There is the new automorphism
The projections on 2-dimensional subalgebra contain the subalgebras to within the inner automorphisms
Adding projections from the ideal we obtain the optimal system
For the case
of the Theorem 2 the 4-dimensional subalgebra has the center
. The automorphisms
produce the optimal system
For the case
of the Theorem 2 the 5-dimensional subalgebra has the center
and the automorphisms
. The optimal system is similar to the case
with adding center
The center
is added to the kernel for the case
of the Theorem 2. The optimal system is obtained from the optimal system of the kernel
The optimal system may be presented as the graph of the embedded subalgebras, for example, for the algebra
of the case
(
Figure 1). The system of embedded subalgebras may be constructed with the help of the graph [
15].
The constructed optimal systems classify the group submodels of the system (
3) in fact. The 1-dimensional subalgebras give the invariant submodels. The 2-dimensional subalgebras give the partial invariant submodels as the simple waves. The subalgebras of big dimensions give the differential invariant submodels with the invariant differential connections.
5. The Examples of the Group Solutions
The subalgebra 1.3 of the case
of the Theorem 2 (
) determines the invariant solution. It is convenient to use the polar system of coordinates
,
The operator of the subalgebra is
the Equations (
3) have the form
The invariants of the subalgebra give the solution representation
The substitution into (
17) give the system of the odinary differential equations
We differentiate the first equation and exclude
From here we obtain the integral
The submodel (
18) is integrated in quadratures. On the simple example we consider a behavior of stream lines. Let
,
,
. Then
and the integral has the form
The first Equation (
18) is
where the inequality is reached by the choice of
m and
n. Hence the stream function is determined by the equation
where
C is constant and the stream line
is the logarithmic spiral
At , ⇒. The solution describe the gas motion from the point source or the point sink.
The subalgebra
for the case
of the Theorem 2
:
The invariants
y,
determine the representation of the regular partial invariant solution of rank 1 and defect 1:
The substitution in (
3) gives the overdetermined system
where a function
is determined within a constant summand. The change
satisfies the second equation of (
19). The first equation
is satisfied by the substitution
The compatibility of Equations (
20), (
21) gives
From here the derivatives are determined
The compatibility leads to the relation
From here it follows: either
or all coefficients at the powers
are equal to zero. At the last case we have the integrals
where
C,
D are constants and the equation
which is integrated with the constants
and
The definition
from (
19) gives the compatibility condition
The substitution the expression
k and equating to zero of the coefficients at the power of
I gives
. Consequently
We obtain the compatible system
Later we solve the system (
20)
The stream lines are the rays . Along a stream line the density is infinite at the origin and it is vacuum at infinity.
For the different case of alternative
it follows from (
20)
From the definition function
, (
19) it follows
and
is determined by the expression
Hence the solution is determined by the given function .
Example 1. Let ⇒. From (21), (20) it follows are constants, The stream lines are straight lines.
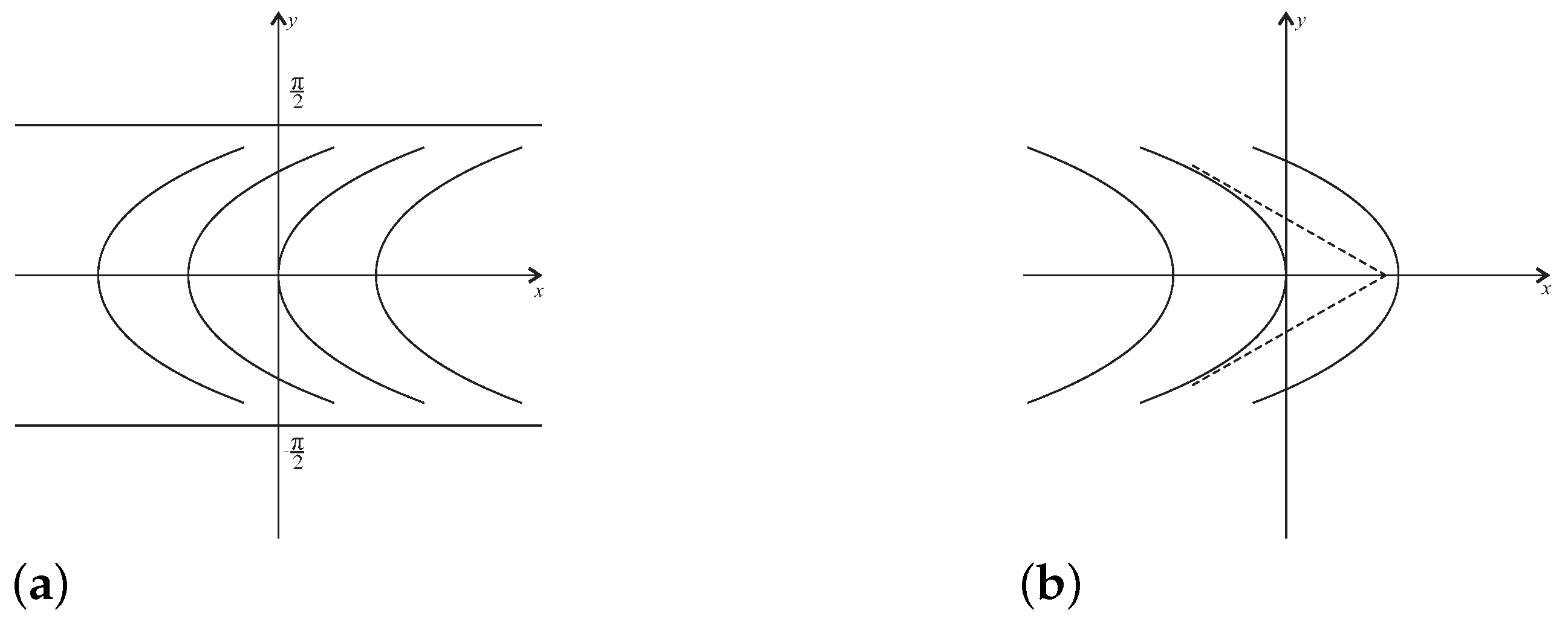
Example 2. Let , . Then , The integrating gives the formulas The stream function is determined by the equation within the constant summand The stream line is determined by the equationswithin the translation on x and dilatation on x and on y. It is even with respect to y and by translation on x cover the flow domain. At the stream lines give the turn back of the flow in the strip (Figure 2a). At we obtain the turn of the flow on the plane with the asymptotes for the stream lines (Figure 2b). 


{kind=link}
{kind=link}

