
High-Harmonic Injection-Based Brushless Wound Field Synchronous Machine Topology

 ,
, 
 ,
, 
Abstract
:1. Introduction
2. Methodology
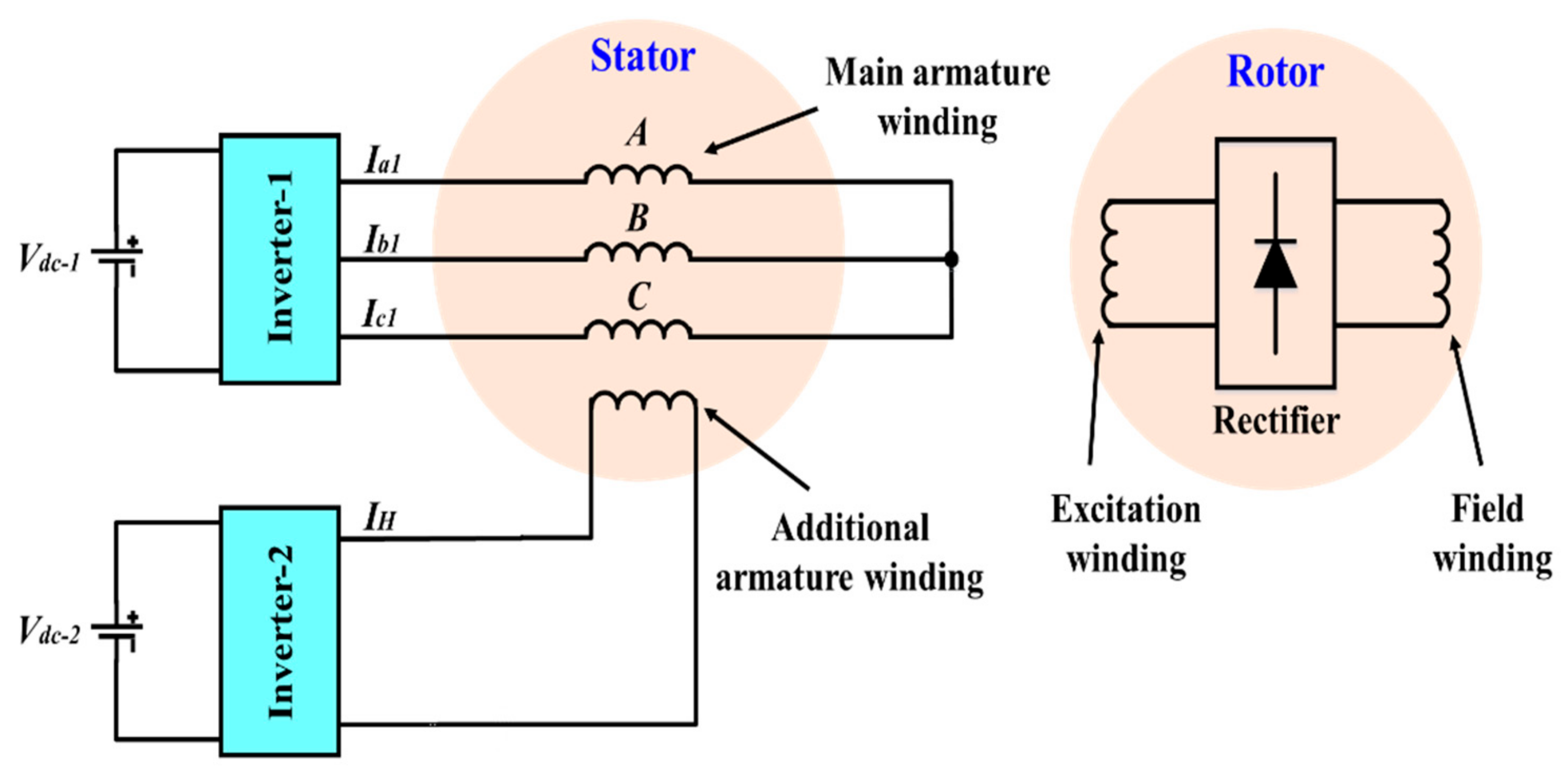
2.1. Proposed Topology
2.2. Mathematical Modelling
3. Electromagnetic Analysis
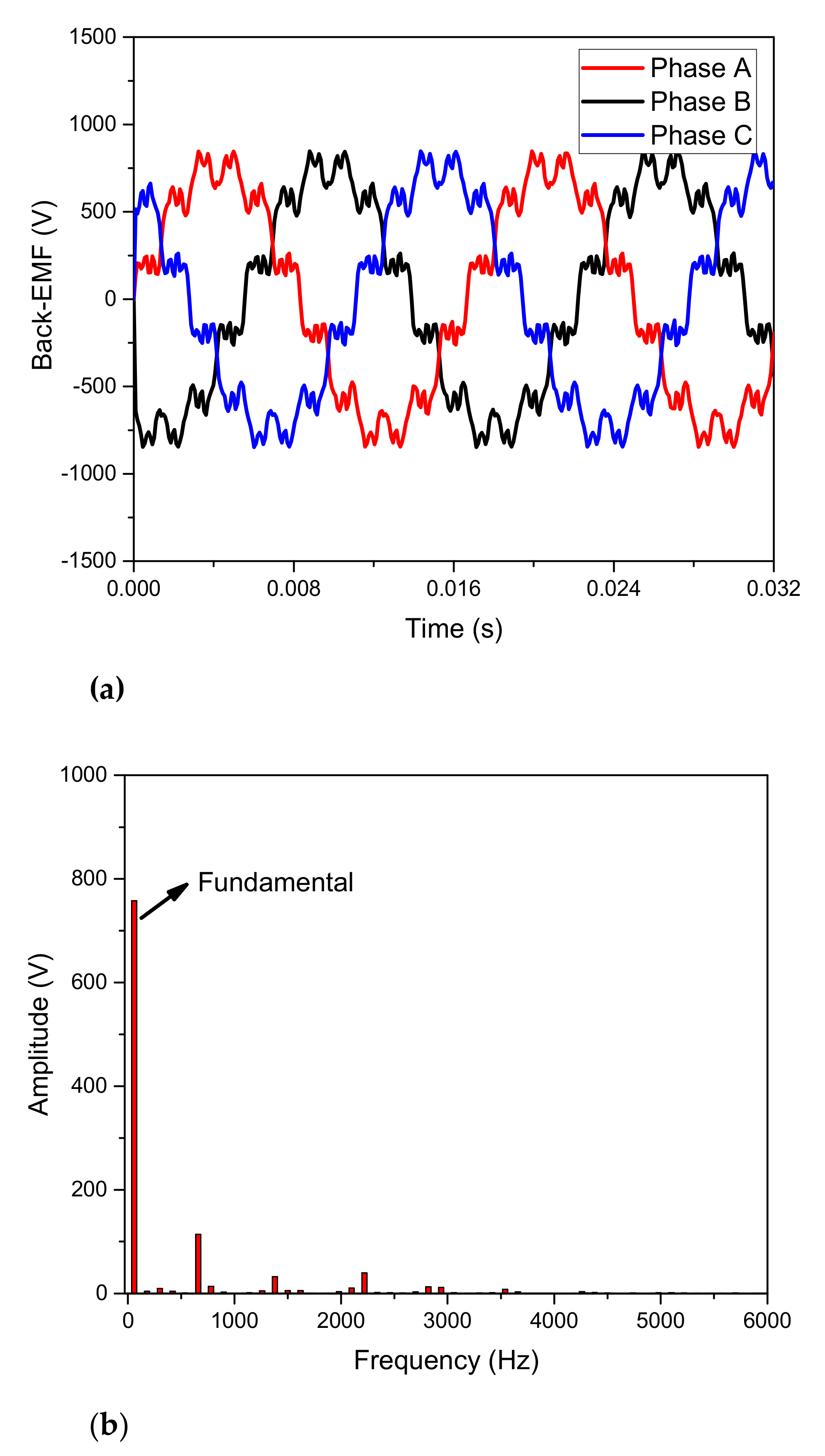
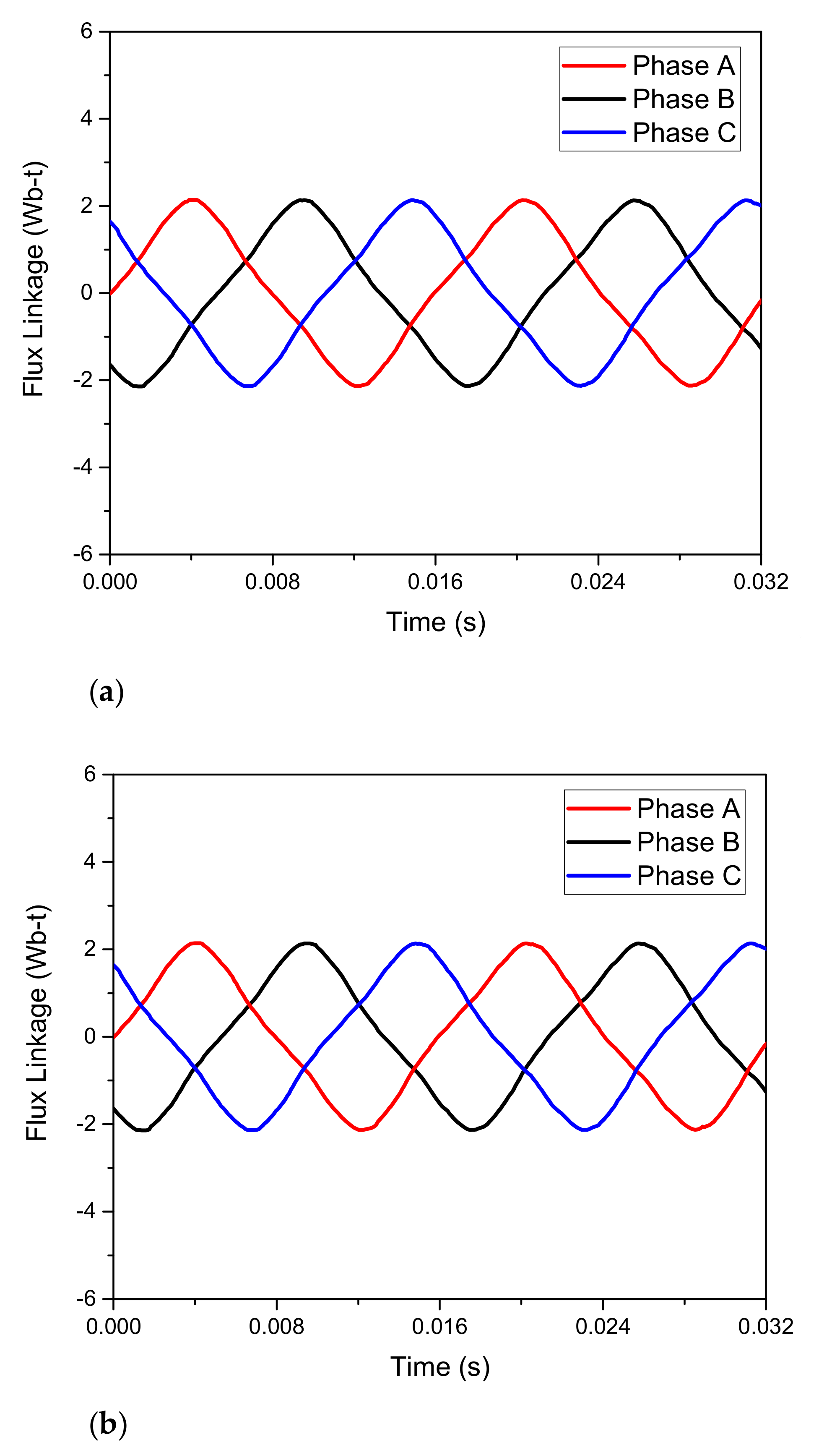
3.1. No-Load Analysis
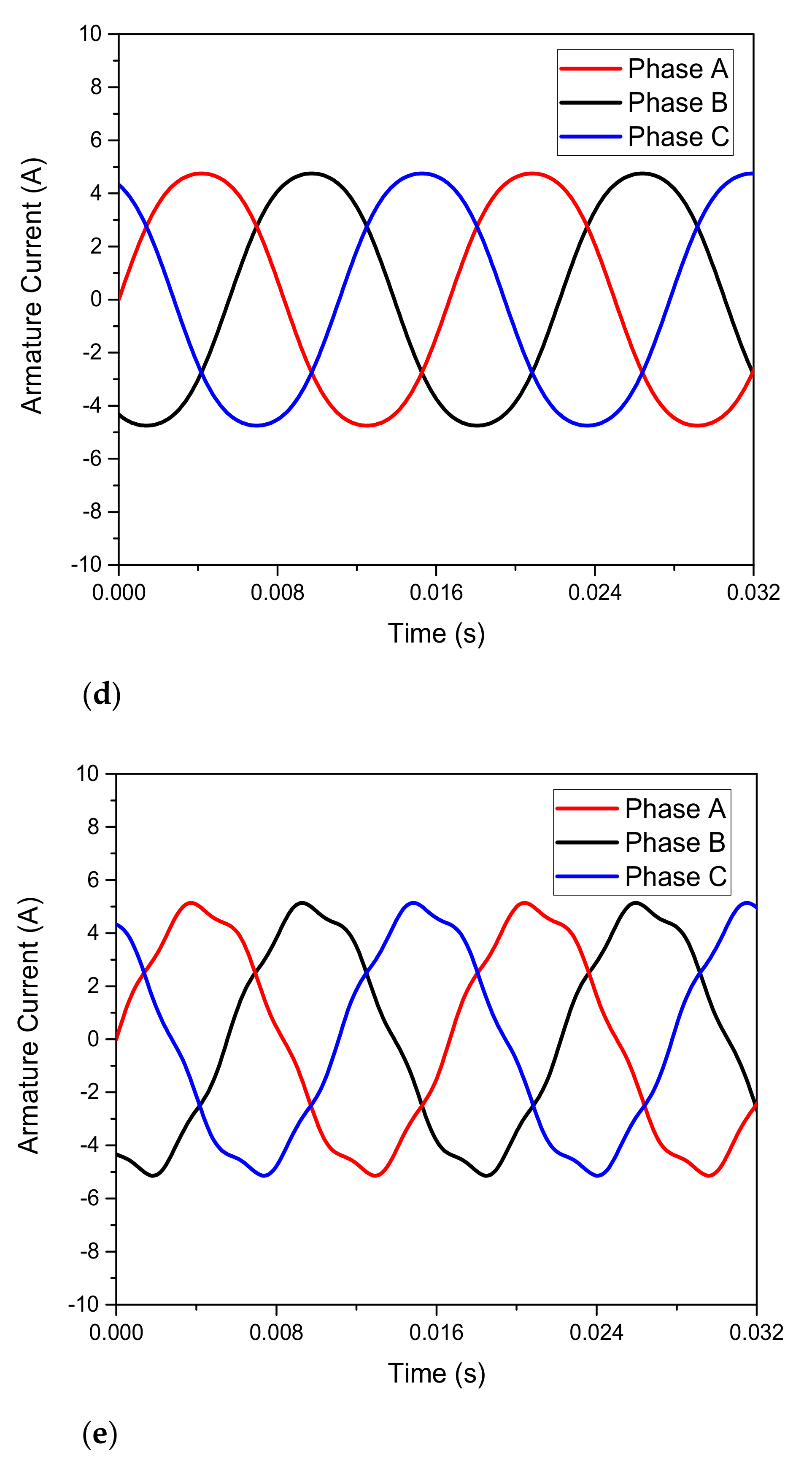
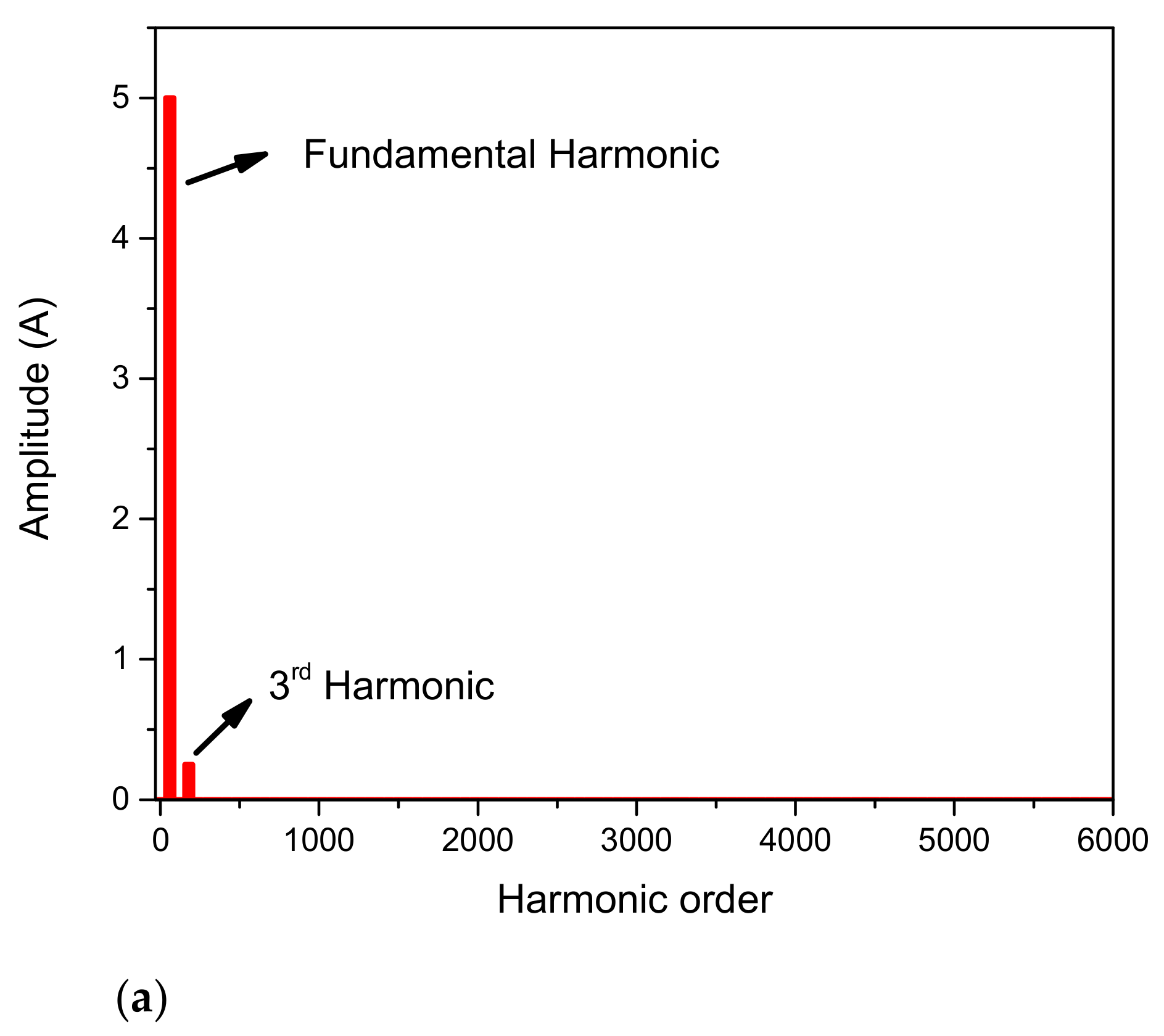
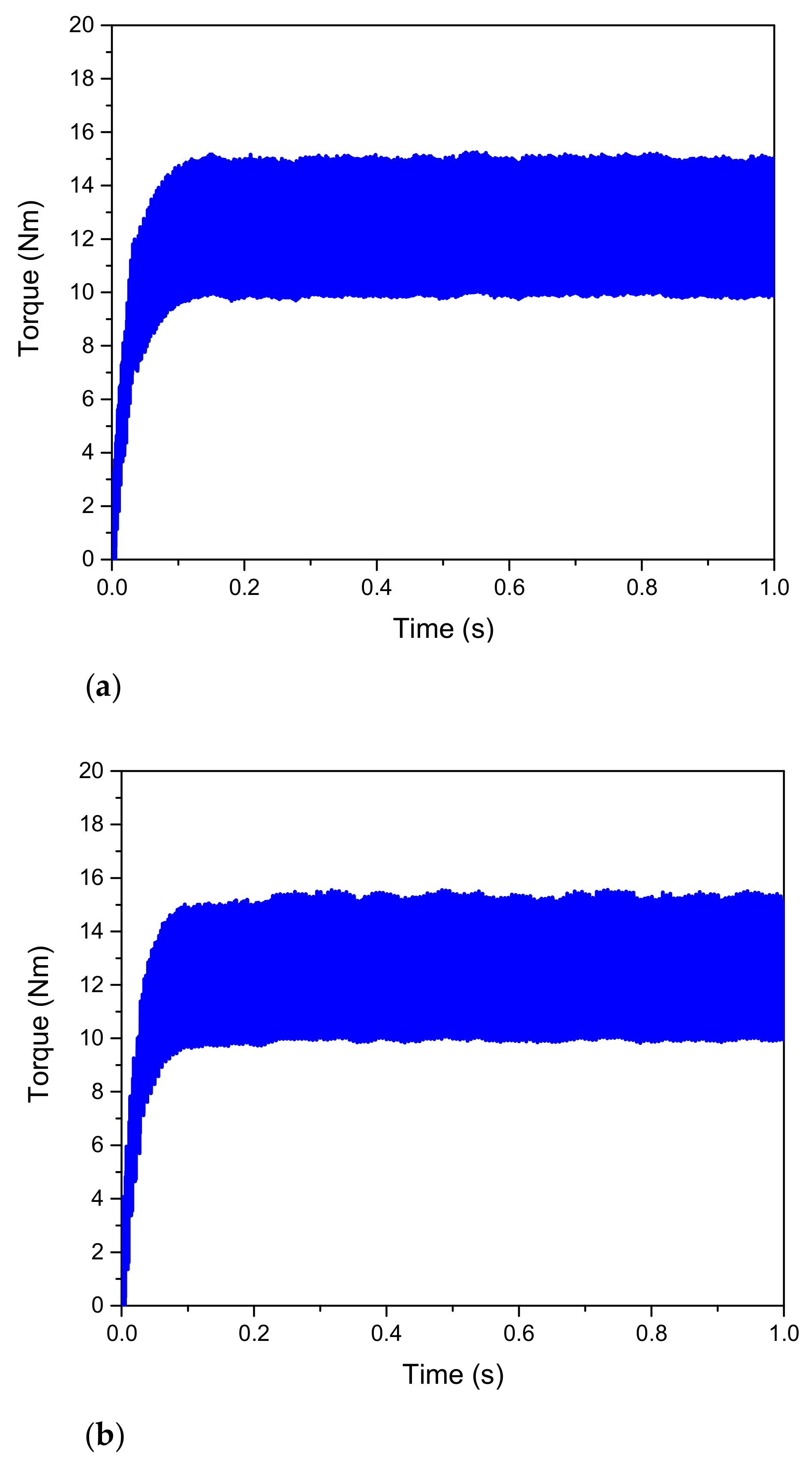
3.2. Full-Load Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sun, L.; Gao, X.; Yao, F.; An, Q.; Lipo, T. A new type of harmonic current excited brushless synchronous machine based on an open winding pattern. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2366–2373. [Google Scholar]
- Yao, F.; An, Q.; Sun, L.; Lipo, T.A. Performance Investigation of a Brushless Synchronous Machine with Additional Harmonic Field Windings. IEEE Trans. Ind. Electron. 2016, 63, 6756–6766. [Google Scholar] [CrossRef]
- Inoue, K.; Yamashita, H.; Nakamae, E.; Fujikawa, T. A brushless self-exciting three-phase synchronous generator utilizing the 5th-space harmonic component of magneto motive force through armature currents. IEEE Trans. Energy Convers. 1992, 7, 517–524. [Google Scholar] [CrossRef]
- Yao, F.; An, Q.; Sun, L.; Illindala, M.S.; Lipo, T.A. Optimization design of stator excitation windings in brushless synchronous machine excited with double-harmonic-windings. In Proceedings of the 2017 International Energy and Sustainability Conference (IESC), Farmingdale, NY, USA, 19–20 October 2017; pp. 1–6. [Google Scholar]
- Ayub, M.; Hussain, A.; Jawad, G.; Kwon, B. Brushless Operation of a Wound-Field Synchronous Machine Using a Novel Winding Scheme. IEEE Trans. Magn. 2019, 55, 8201104. [Google Scholar] [CrossRef]
- Ali, Q.; Lipo, T.A.; Kwon, B.-I. Design and analysis of a novel brushless wound rotor synchronous machine. IEEE Trans. Magn. 2015, 51. [Google Scholar] [CrossRef]
- Hussain, A.; Kwon, B.-I. A new brushless wound rotor synchronous machine using a special stator winding arrangement. Electr. Eng. 2018, 100, 1797–1804. [Google Scholar] [CrossRef]
- Ali, Q.; Bukhari, S.S.H.; Atiq, S. Variable-speed, sub-harmonically excited BL-WRSM avoiding unbalanced radial force. Electr. Eng. 2019, 101, 251–257. [Google Scholar] [CrossRef]
- Ayub, M.; Atiq, S.; Sirewal, G.J.; Kwon, B. Fault-Tolerant Operation of Wound Field Synchronous Machine Using Coil Switching. IEEE Access 2019, 7, 67130–67138. [Google Scholar] [CrossRef]
- Ayub, M.; Jawad, G.; Kwon, B. Consequent-Pole Hybrid Excitation Brushless Wound Field Synchronous Machine with Fractional Slot Concentrated Winding. IEEE Trans. Magn. 2019, 55, 8203805. [Google Scholar] [CrossRef]
- Khan, S.; Bukhari, S.S.H.; Ro, J. Design and Analysis of a 4-kW Two-Stack Coreless Axial Flux Permanent Magnet Synchronous Machine for Low-Speed Applications. IEEE Access 2019, 7, 173848–173854. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Sirewal, G.J.; Chachar, F.A.; Ro, J.-S. Brushless Field Excitation Scheme for Wound Field Synchronous Machines. Appl. Sci. 2020, 10, 5866. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Sirewal, G.J.; Chachar, F.A.; Ro, J.-S. Dual-Inverter-Controlled Brushless Operation of Wound Rotor Synchronous Machines Based on an Open-Winding Pattern. Energies 2020, 13, 2205. [Google Scholar] [CrossRef]
- Jawad, G.; Ali, Q.; Lipo, T.A.; Kwon, B.I. Novel brushless wound rotor synchronous machine with zero-sequence third-harmonic field excitation. IEEE Trans. Magn. 2016, 52, 8106104. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Sirewal, G.J.; Ro, J.-S. A New Small-Scale Self-Excited Wound Rotor Synchronous Motor Topology. IEEE Trans. Magn. 2021, 57, 8200205. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Ahmad, H.; Sirewal, G.J.; Ro, J.-S. Simplified Brushless Wound Field Synchronous Machine Topology Based on a Three-phase Rectifier. IEEE Access 2021, 9, 8637–8648. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Sirewal, G.J.; Madanzadeh, S.; Ro, J.-S. Cost-Effective Single-Inverter-Controlled Brushless Scheme for Wound Rotor Synchronous Machines. IEEE Access 2020, 8, 204804–204815. [Google Scholar] [CrossRef]
- Ayub, M.; Bukhari, S.S.H.; Sirewal, G.J.; Arif, A.; Kwon, B.-I. Utilization of Reluctance Torque for Improvement of the Starting and Average Torques of a Brushless Wound Field Synchronous Machine. Electr. Eng. 2021, 103. [Google Scholar] [CrossRef]
- Ayub, M.; Sirewal, G.J.; Bukhari, S.S.H.; Kwon, B.-I. Brushless wound rotor synchronous machine with third-harmonic field excitation. Electr. Eng. 2020, 102, 259–265. [Google Scholar] [CrossRef]
- Ayub, M.; Bukhari, S.S.H.; Kwon, B.-I. Brushless Wound-Field Synchronous Machine with Third-Harmonic Field Excitation using a Single Inverter. Electr. Eng. 2019, 101, 165–173. [Google Scholar] [CrossRef]
- Emetor, A.B. Electric Motor Winding Calculator. Available online: https://www.emetor.com/windings/ (accessed on 25 June 2021).
- Yao, F.; An, Q.; Gao, X.; Sun, L.; Lipo, T.A. Principle of operation and performance of a synchronous machine employing a new harmonic excitation scheme. IEEE Trans. Ind. Appl. 2015, 51, 3890–3898. [Google Scholar] [CrossRef]
- An, Q.; Gao, X.; Yao, F.; Sun, L.; Lipo, T. The structure optimization of novel harmonic current excited brushless synchronous machines based on open winding pattern. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1754–1761. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of poles/slots/layers | 4/24/2 |
| Coil span | 5 slots |
| Pole pitch | 6 slots |
| Periodicities | 2, 4 |
| Winding factor | 0.933 |
| Parameter | Value |
|---|---|
| Rated power | 3 kW |
| Machine poles/Stator slots | 4/24 |
| Rated speed | 1800 rpm |
| Frequency | 60 Hz |
| Stator outer/inner diameter | 130/80 mm |
| Air gap | 0.5 mm |
| Rotor diameter | 79 mm |
| Rotor main/sub-teeth | 4/8 |
| Exciter/Field winding number of turns | 25/250 |
| Armature winding number of turns | 100 |
| Stack length | 90 mm |
| Attribute | Value |
|---|---|
| Boundry conditions | 195 mm |
| Number of divisions | 21,600 |
| Time interval/1 step | 92.5 μs |
| Number of steps | 21,601 |
| Number of elements (for Mesh) | 5508 |
| Number of nodes (for Mesh) | 4024 |
| Radial divisions (for Mesh) | 7 |
| Circumferential divisions (for Mesh) | 360 |
| Attribute | 3rd Harmonic Injection-Based Topology | 6th Harmonic Injection-Based Topology |
|---|---|---|
| Average output torque | 12.4814 Nm | 12.8048 Nm |
| Maximum torque | 15.1361 Nm | 15.3927 Nm |
| Torque ripple | 42% | 42.5% |
| Efficiency | 82.91% | 85.095% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bukhari, S.S.H.; Mangi, F.H.; Sami, I.; Ali, Q.; Ro, J.-S. High-Harmonic Injection-Based Brushless Wound Field Synchronous Machine Topology. Mathematics 2021, 9, 1721. https://doi.org/10.3390/math9151721
Bukhari SSH, Mangi FH, Sami I, Ali Q, Ro J-S. High-Harmonic Injection-Based Brushless Wound Field Synchronous Machine Topology. Mathematics. 2021; 9(15):1721. https://doi.org/10.3390/math9151721
Chicago/Turabian StyleBukhari, Syed Sabir Hussain, Fareed Hussain Mangi, Irfan Sami, Qasim Ali, and Jong-Suk Ro. 2021. "High-Harmonic Injection-Based Brushless Wound Field Synchronous Machine Topology" Mathematics 9, no. 15: 1721. https://doi.org/10.3390/math9151721
APA StyleBukhari, S. S. H., Mangi, F. H., Sami, I., Ali, Q., & Ro, J.-S. (2021). High-Harmonic Injection-Based Brushless Wound Field Synchronous Machine Topology. Mathematics, 9(15), 1721. https://doi.org/10.3390/math9151721