3.1. Model Setup
The simulation is conducted on two dimensions, which are the stream-wise direction (x) and the gravitational direction (z). In the stream-wise direction, the drift term dominates the particle velocity. Therefore, the diffusivity and turbulence terms can be ignored. In the stream-wise direction, the drift flow velocity is assumed to follow the logarithm profile, consistent with Equation (4).
The mean drift flow velocity in the x-direction is a function of z.
is the shear velocity and
is the roughness height. When the above assumptions are taken into consideration, the numerical governing Equation (2) for forward tracking in the x-direction can be written as follows.
The numerical governing Equation (2) for forward tracking in the z-direction can be written as follows. The turbulence diffusivity in the z-direction
is a function of position
, and
is the settling velocity.
When a particle is transported to the bed, re-suspension may occur by the mechanisms that were proposed by Wu and Lin [
36], who suggested that a log-normal distribution of instantaneous velocities
outperforms a normal distribution of
in approaching particles on the bed when considering the pickup probability threshold. According to Wu et al. [
36], the threshold
is shown below.
In Equation (7), , , , , represent particle diameter, particle density, water density, gravity acceleration, and lift coefficient respectively.
3.2. Model Parameters
In this study, the formula proposed by Rouse [
37] or by Absi et al. [
38] is adopted in calculating turbulence diffusivity. Rouse [
37] proposed the following vertical kinematic viscosity of a fluid:
, , , represent turbulence diffusivity in the z-direction, the shear velocity, the z-coordinate of particle position, and the flow depth respectively.
If Rouse’s diffusivity is adopted, then the numerical governing equation in the z-direction for forward tracking can be written as follows:
Absi et al. [
38] proposed the following formula for the diffusivity of suspended particles.
where
is particle Stokes number,
is eddy viscosity, and
is turbulent kinetic energy. Turbulence intensities in the fluid phase and the solid phase are denoted as
and
, respectively. The ratio of
to
is assumed to be
. The formulas for
,
and
are listed below.
where
0.09,
=
, and
,
,
and
are friction-Reynolds-number-dependent parameters.
3.5. Comparison among Backward and Forward Tracking Cases
Additional to backward tracking, forward tracking is also exerted in
Section 3.
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6 and
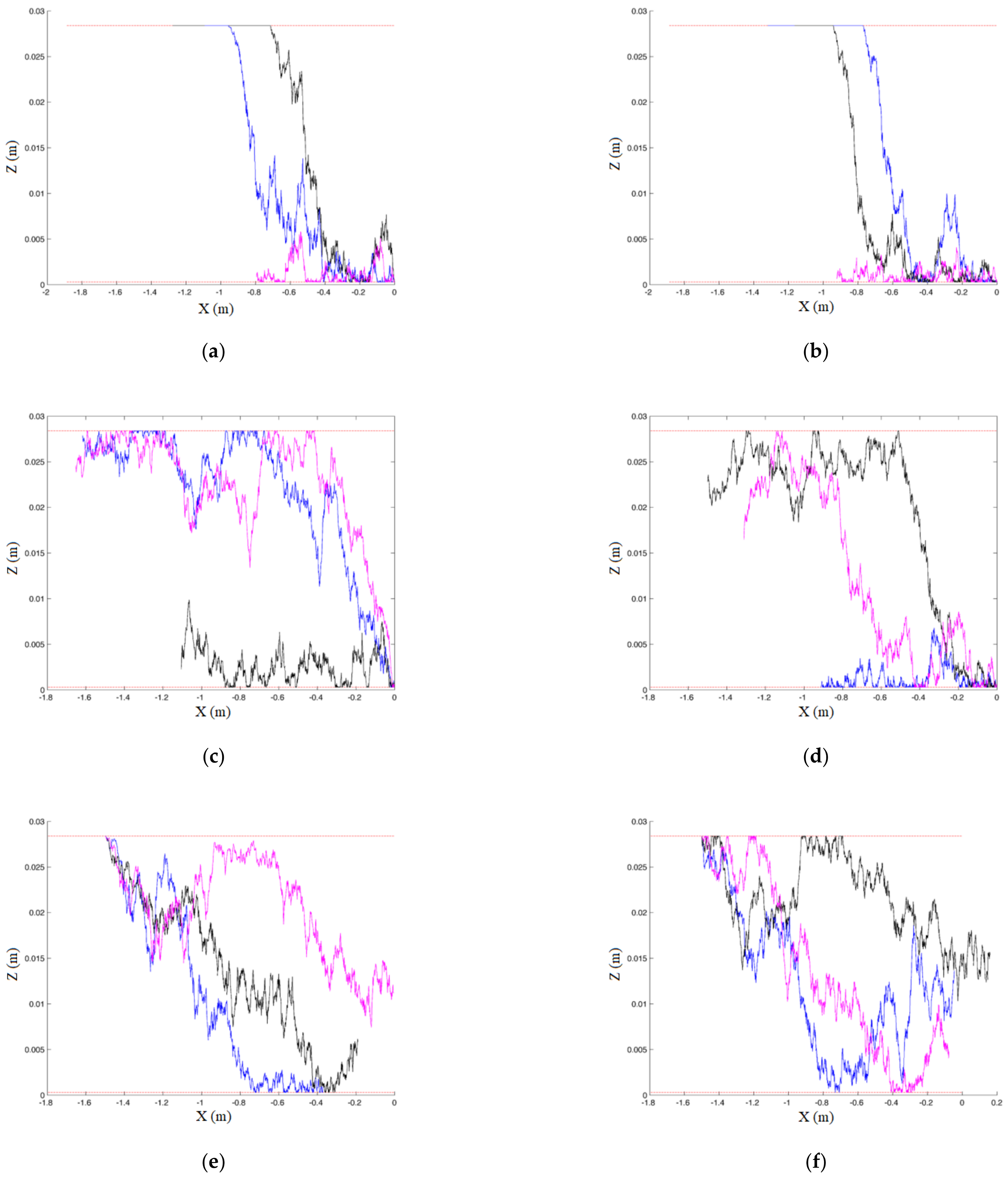
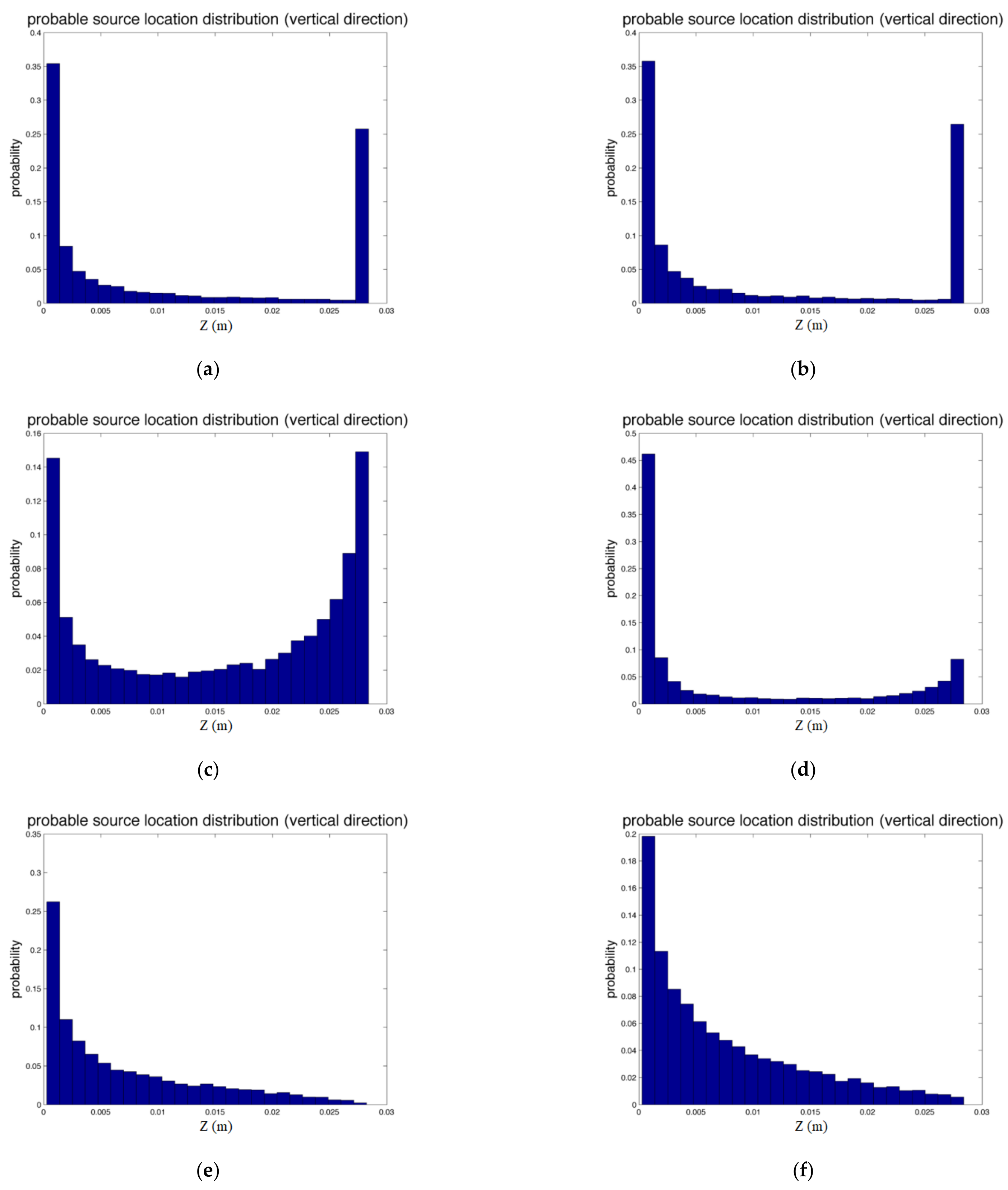
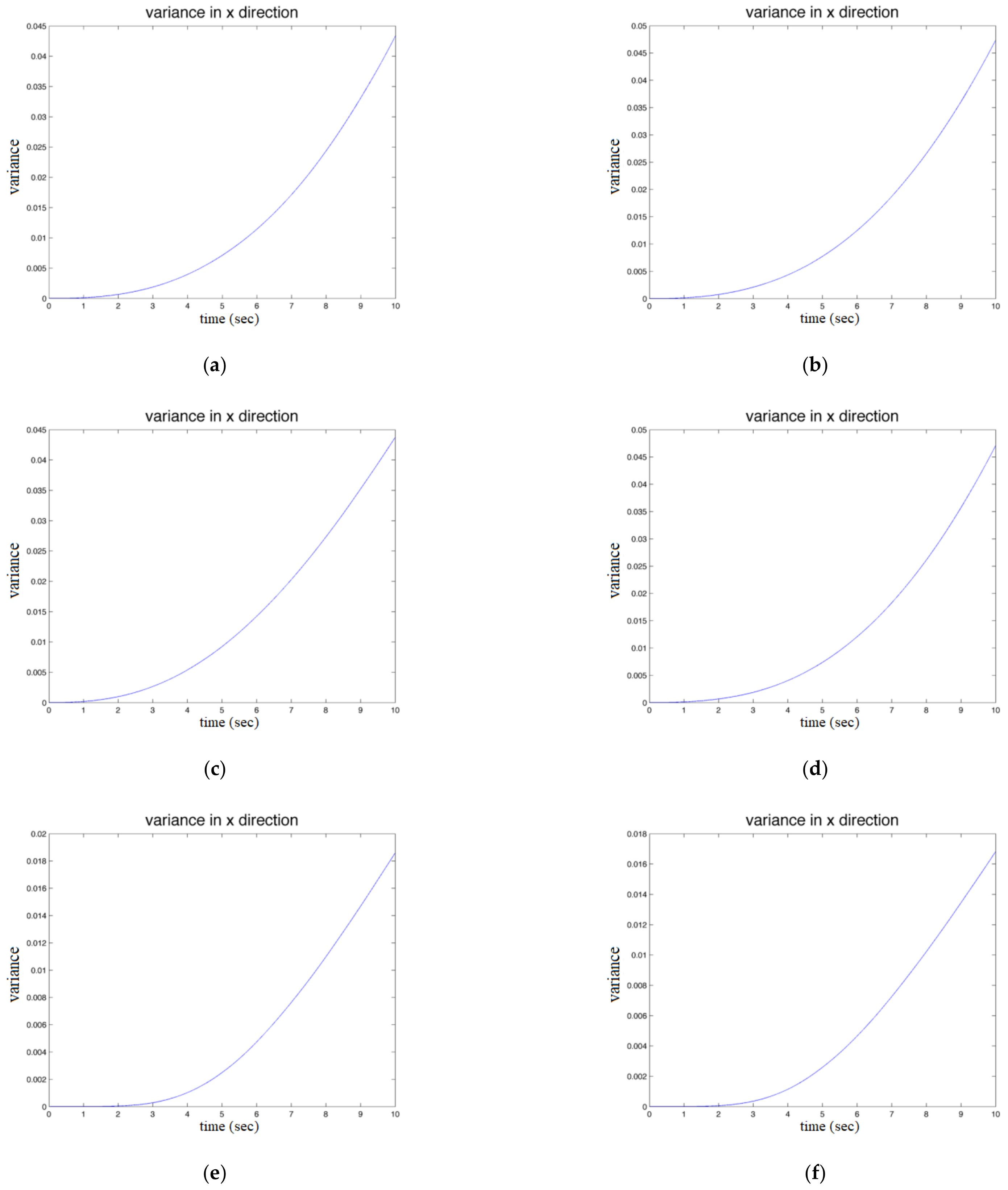
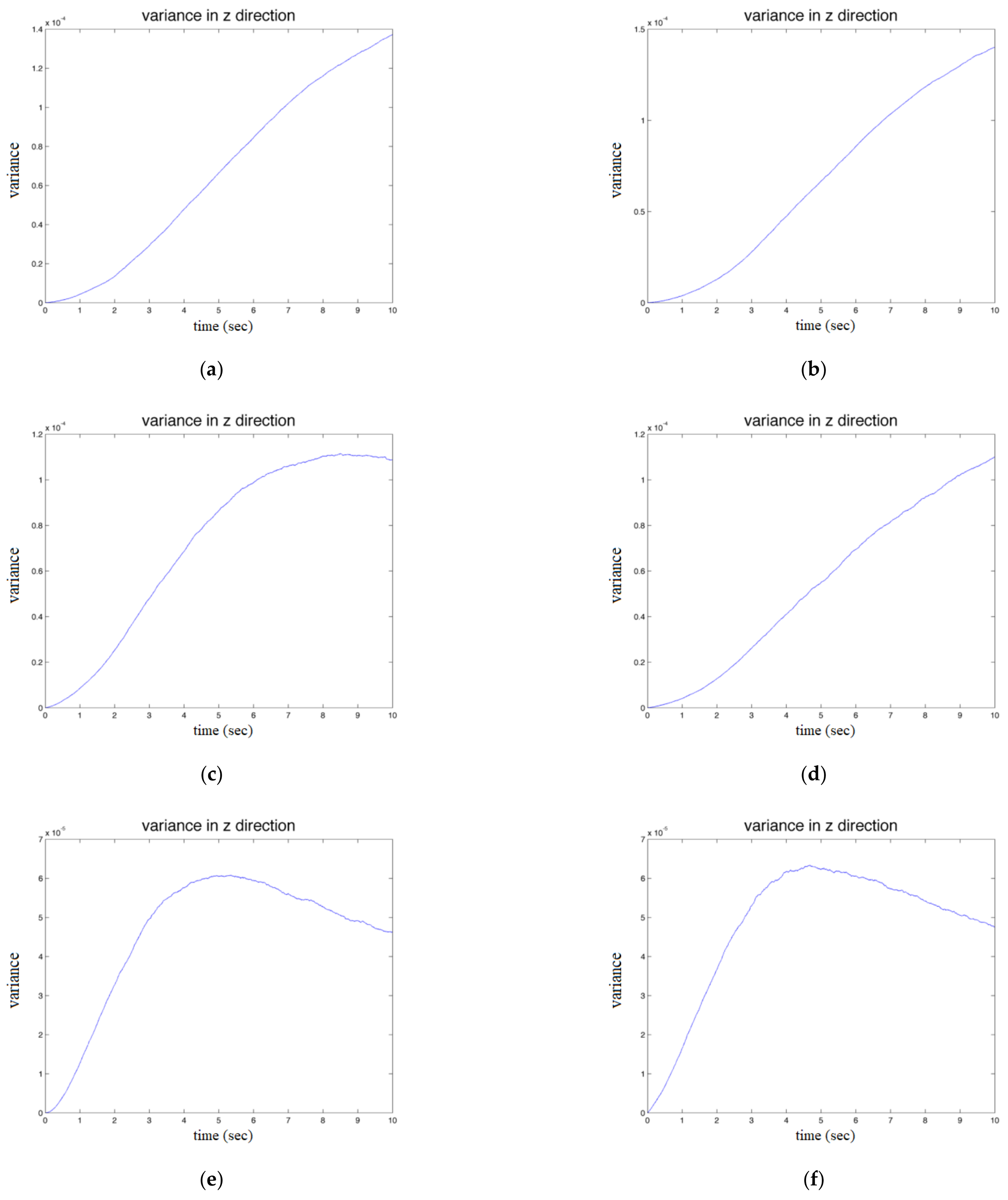
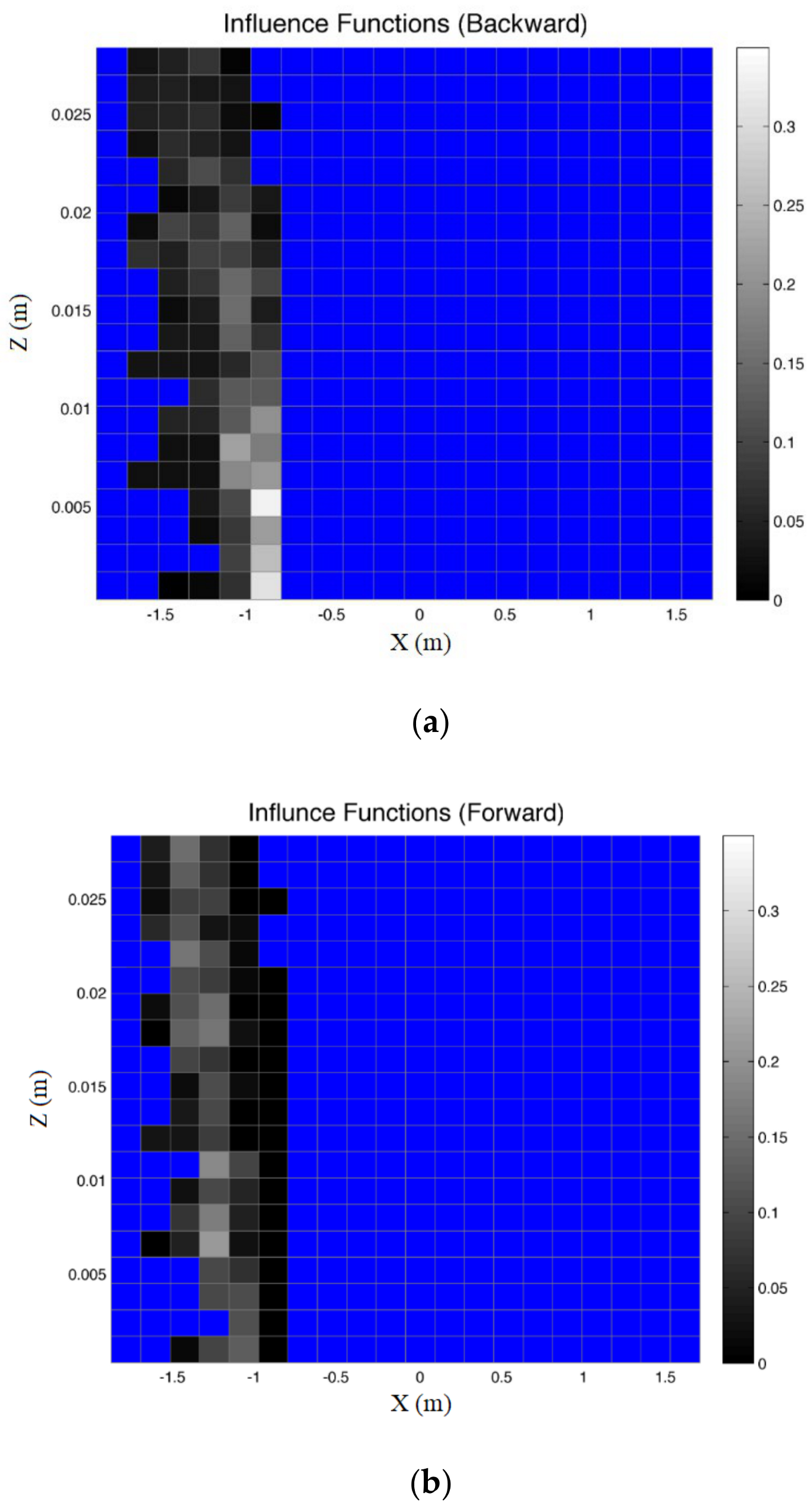
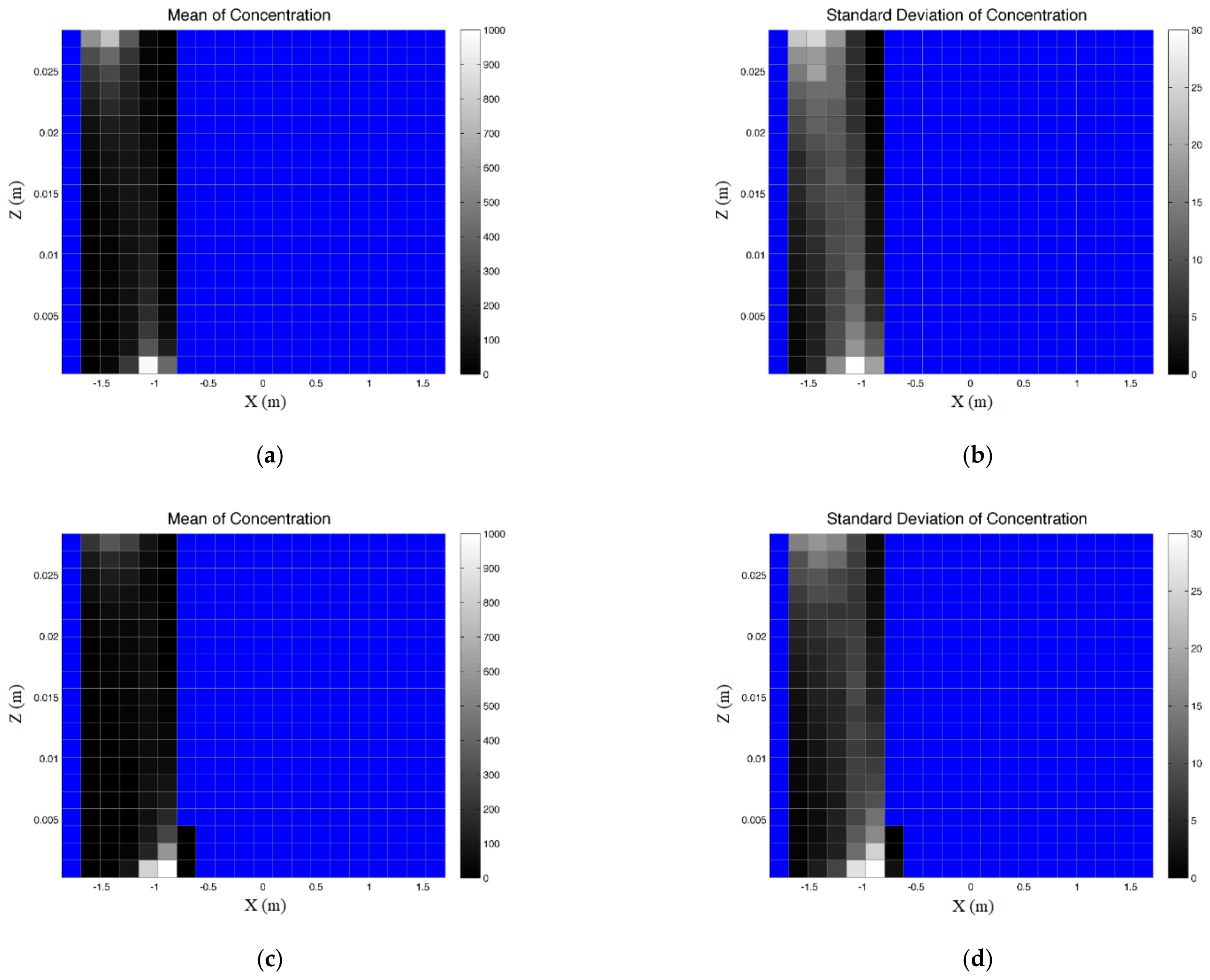
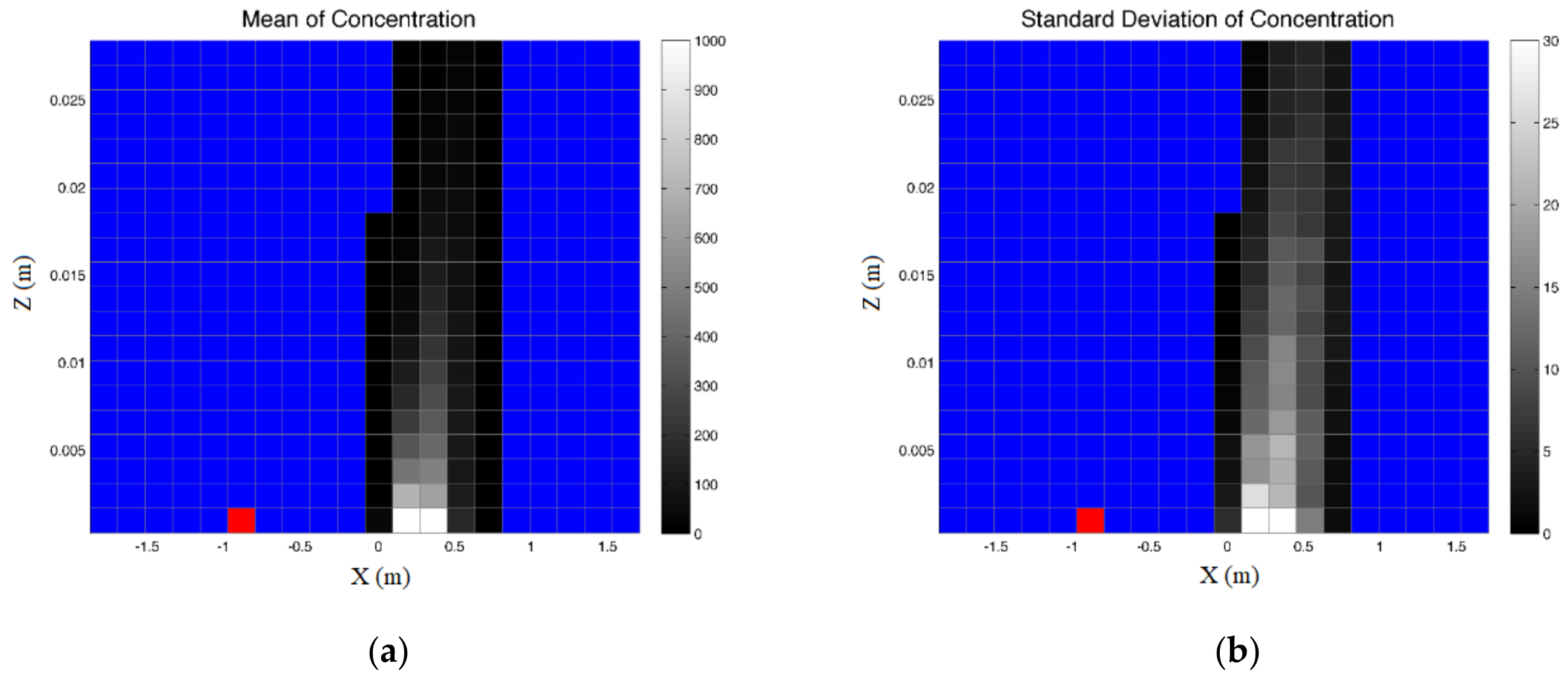
Figure 7 present the results of simulations that involved scenarios, ensemble means of trajectories, probable source locations, and the distributions of probable source locations in both stream-wise and vertical directions. In those figures, a and b show backward tracking tests with the Rouse diffusivity, performed using the explicit and implicit method respectively; c and d represent backward tracking tests with the diffusivity of Absi et al. [
38], conducted using the explicit and implicit method respectively; e and f show forward tracking tests carried out using the explicit method with the diffusivity of Rouse [
37] and Absi et al. [
38] respectively. In
Figure 1 and
Figure 2, the red line represents the water surface at z = 0.0284 (m).
According to Visser [
39], though, the diffusivity should be evaluated at a slightly different location from
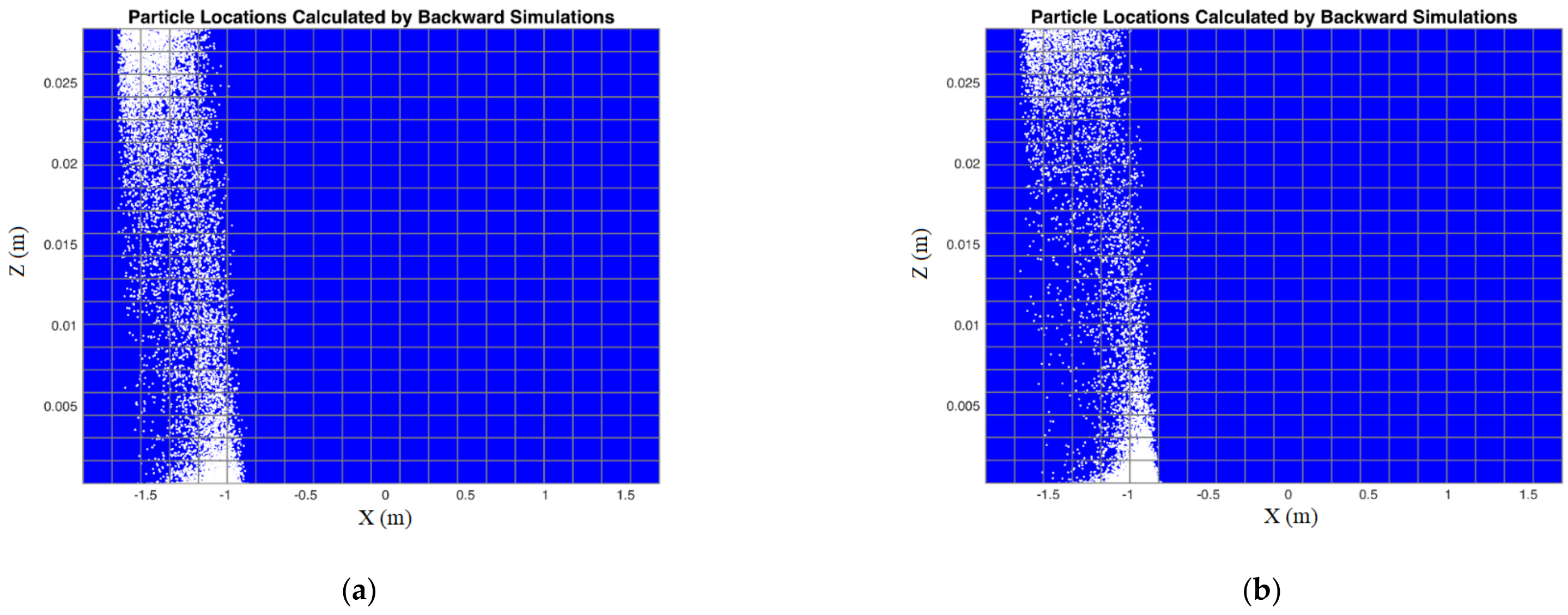
for self-consistency of the process. In this section, we focus on the comparisons between diffusivities calculated by the functions of Rouse [
37] and Absi et al. [
38]. Therefore, we adopt the suggestion of Ross and Sharples [
40], which is to output the particle positions of each time step to observe the difference between the aforementioned two numerical methods. It is shown in
Figure 1a,b that particles would remain at the water surface once they reach the water surface due to the zero-vertical diffusivity of Rouse [
37] at the water surface. However, this limitation can be eliminated with the diffusivity of Absi et al. [
38]. From
Figure 1b,c, the scenarios with the diffusivity of Absi et al. [
38] showed that particles would not have to remain at the water surface, which is closer to reality. The line-like pattern at the tops of
Figure 3a,b also demonstrates the above observation, as the line-like pattern consists of a great number of particles at the water surface. Furthermore, the lag between fluid particles and sediment particles is considered in the diffusivity of Absi et al. [
38]. Therefore, the simulation results with the diffusivity of Absi et al. [
38] would be made more meaningful than the diffusivity of Rouse [
37].
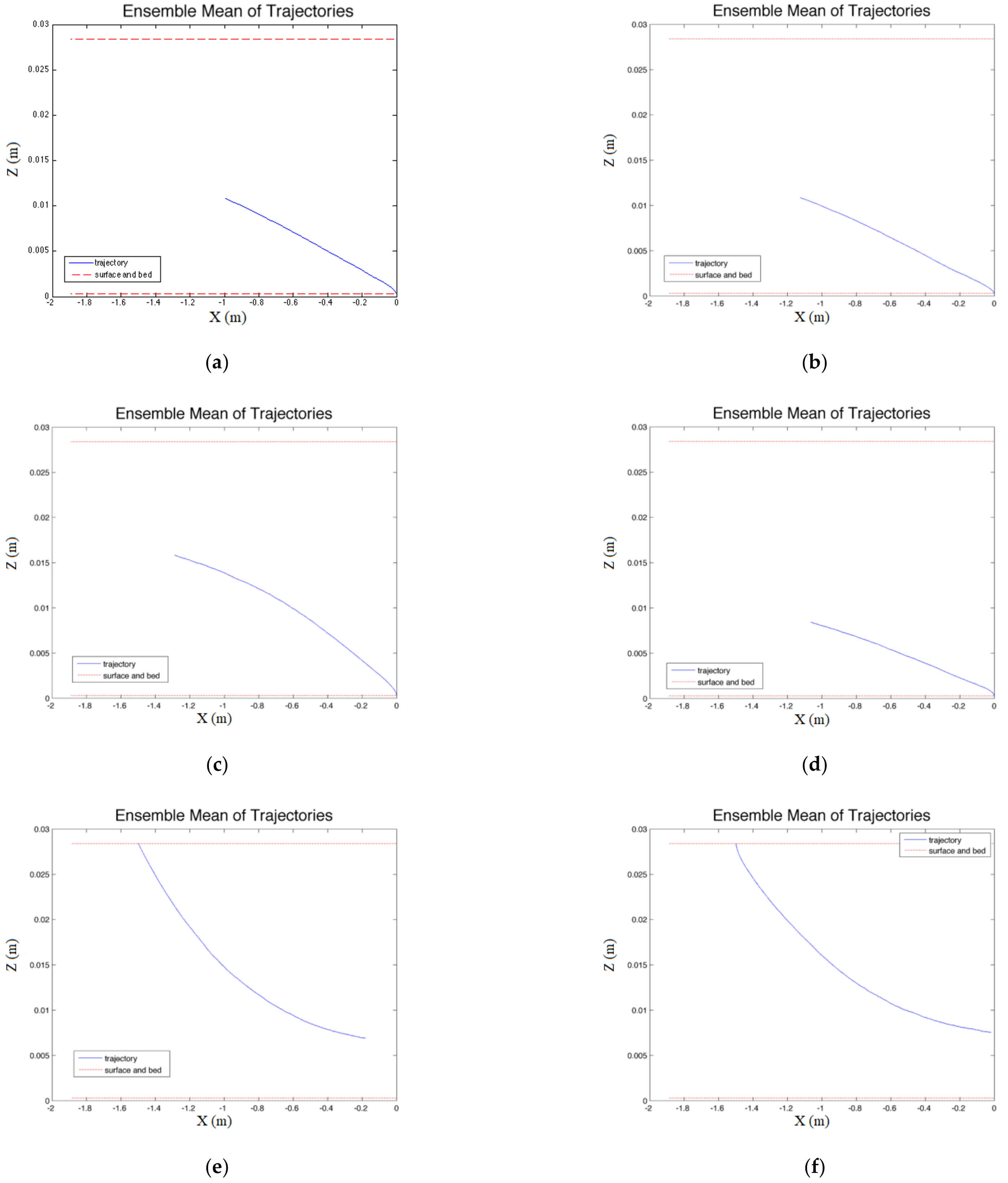
In the aspect of ensemble mean of trajectories (
Figure 2), no significant difference between these two diffusivities except for the case of backward tracking with diffusivity of Absi et al. [
38].
Figure 2c,d shows that the final position of the mean trajectory by the explicit method is higher than that by the implicit method. It may result from the limitation of implicit methods in which the unknown
cannot be calculated directly. Coupling with the lag between fluid particles and sediment particles considered in the diffusivity, the discrepancies between explicit and implicit methods of diffusivity of Absi et al. [
38] consequently might be obvious.
By comparing
Figure 1 and
Figure 2, one can realize the importance of utilizing a stochastic particle tracking model to assess the variability of particle movement and, subsequently, the likelihood of particle sources.
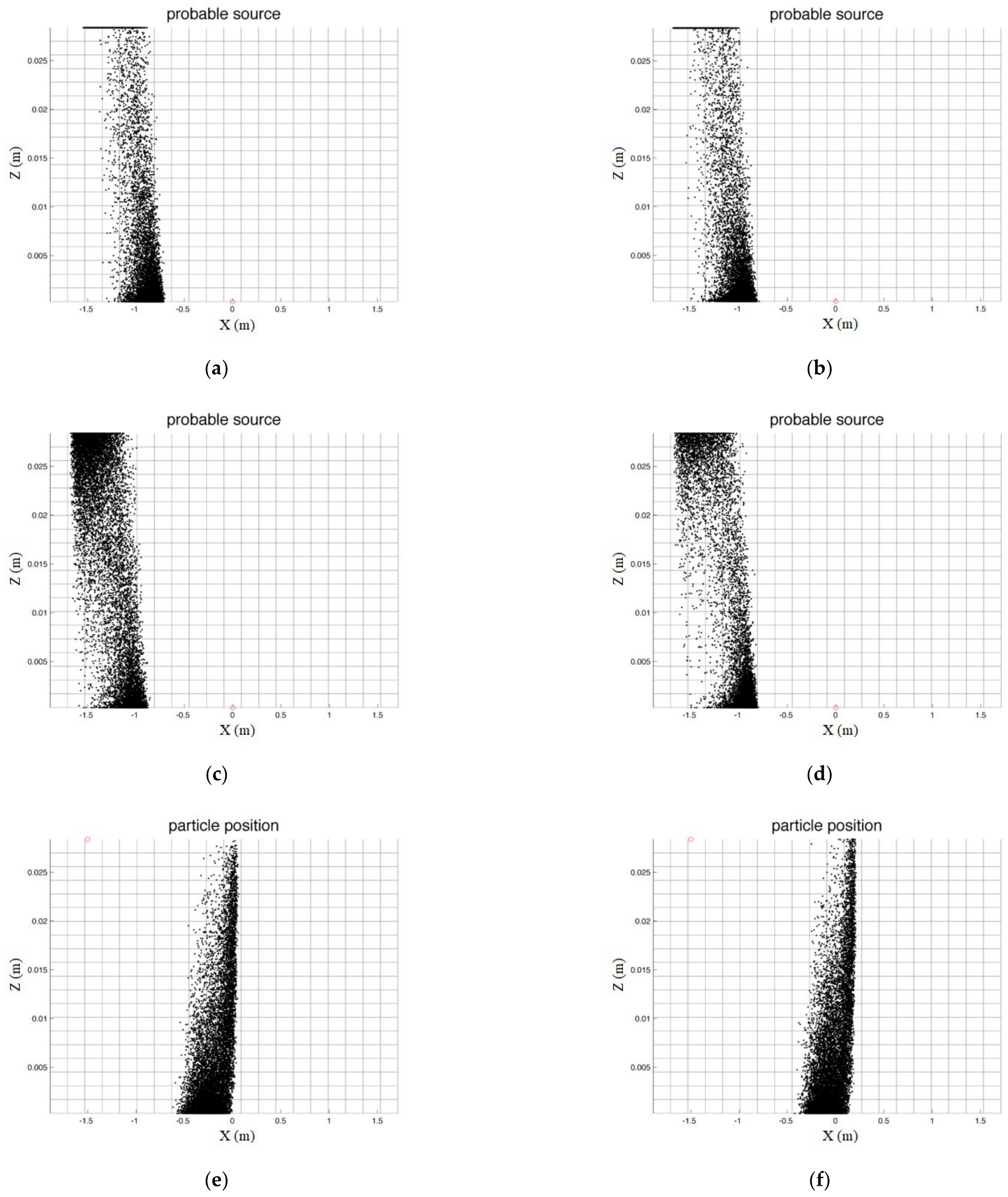
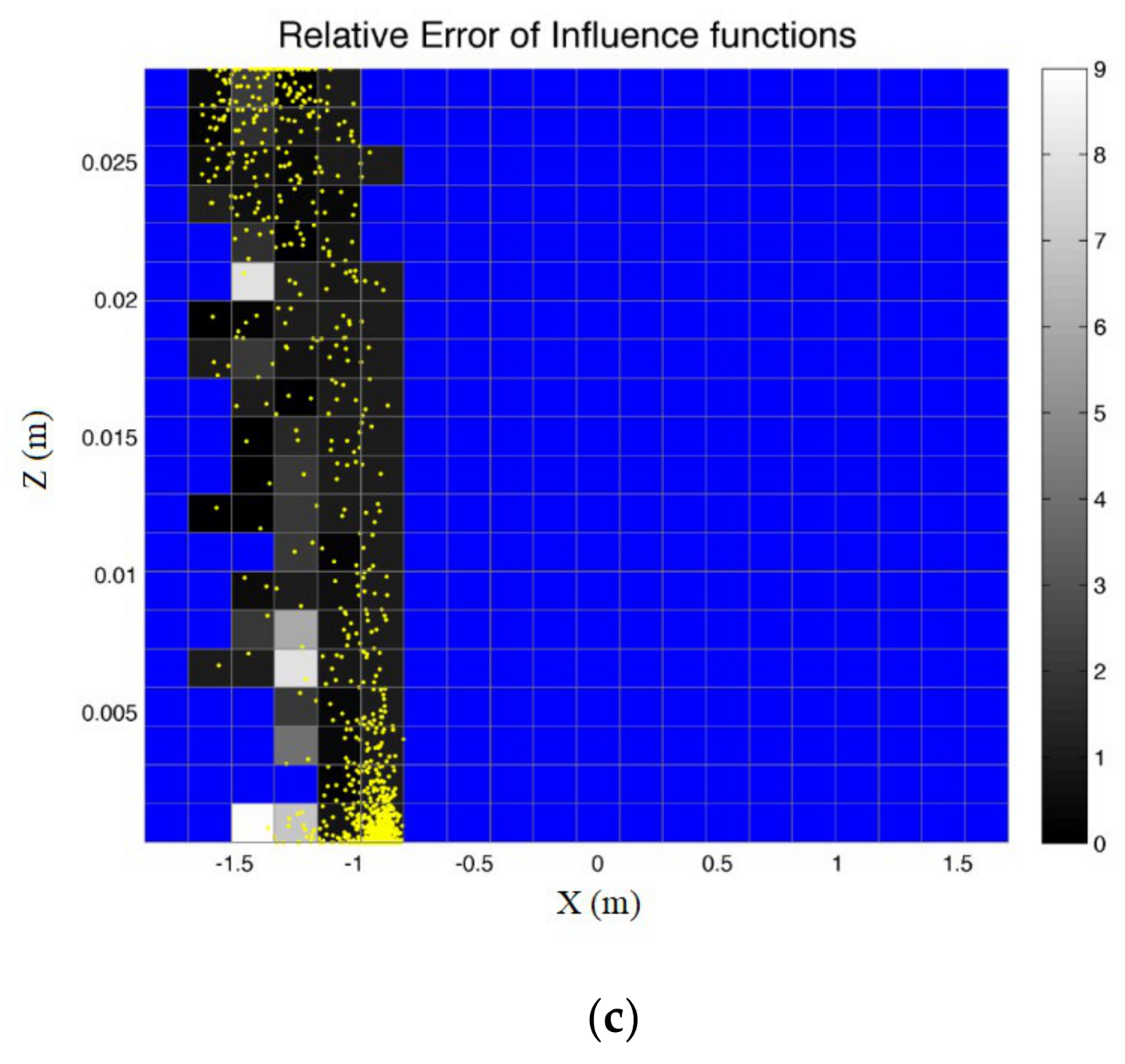
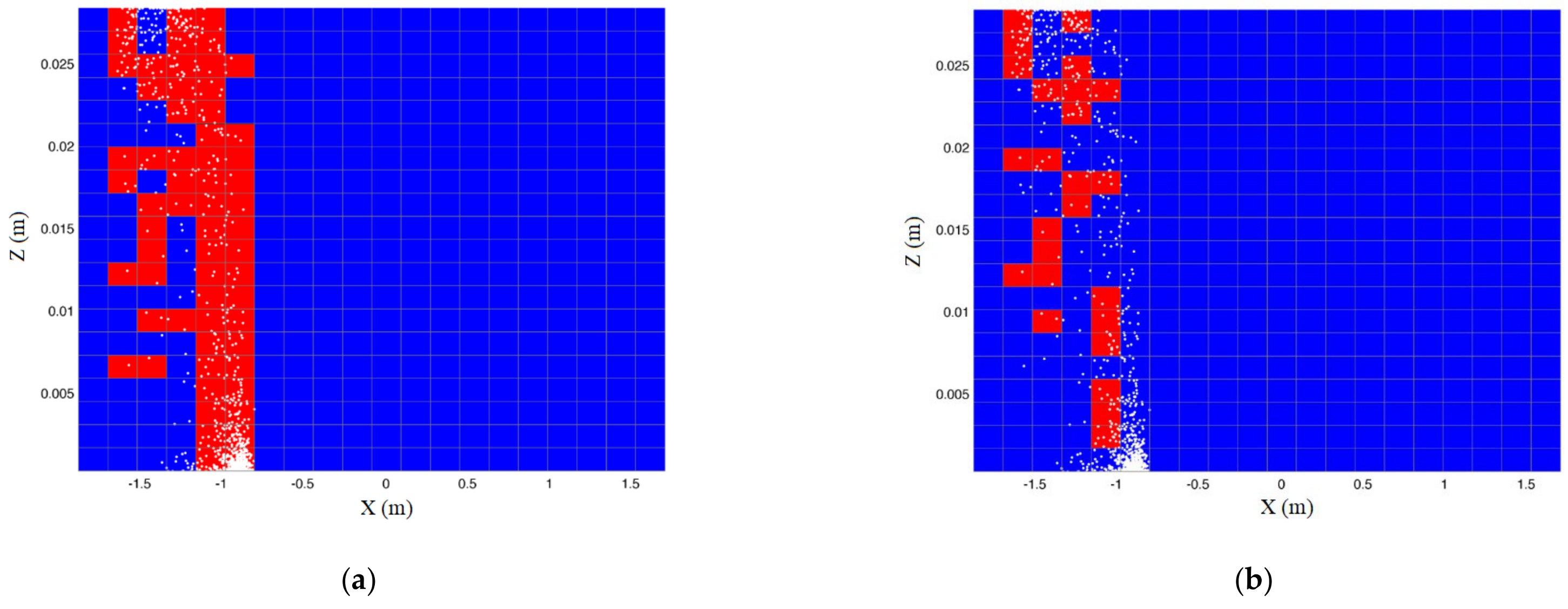
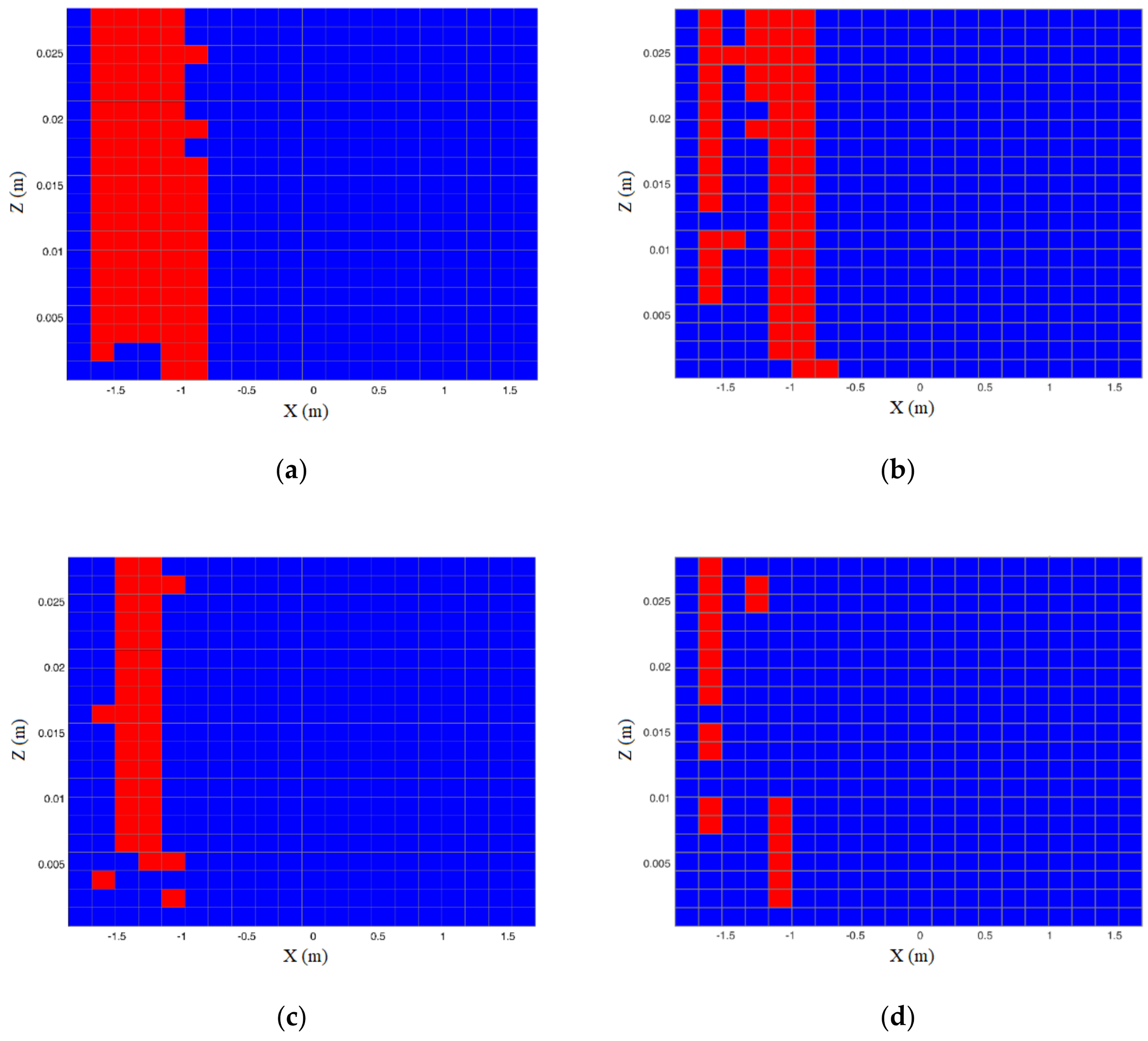
With reference to
Figure 3a–d, in all cases of backward tracking with the same initial conditions and parameters, the results reveal that the source is probably at x = −1.5 and z = h. To verify whether particles are deposited on the riverbed at x = 0, two forward tracking tests are carried out to determine the trajectories of particles that are released from the aforementioned point (x = −1.5, z = h). In forward simulations, the assumptions and parameters are the same, but the initial particle positions and tracking directions are different from backward simulations. For forward simulations, the particles are released from the water surface at x = −1.5 m. Two forward tracking cases are modeled by the explicit numerical method (Equations (5) and (6)) with the diffusivity of Rouse [
37] or Absi et al. [
38].
With reference to figures that show particle positions 10 s earlier than the time that sediment particles deposit on the riverbed at x = 0 in the backward tests (
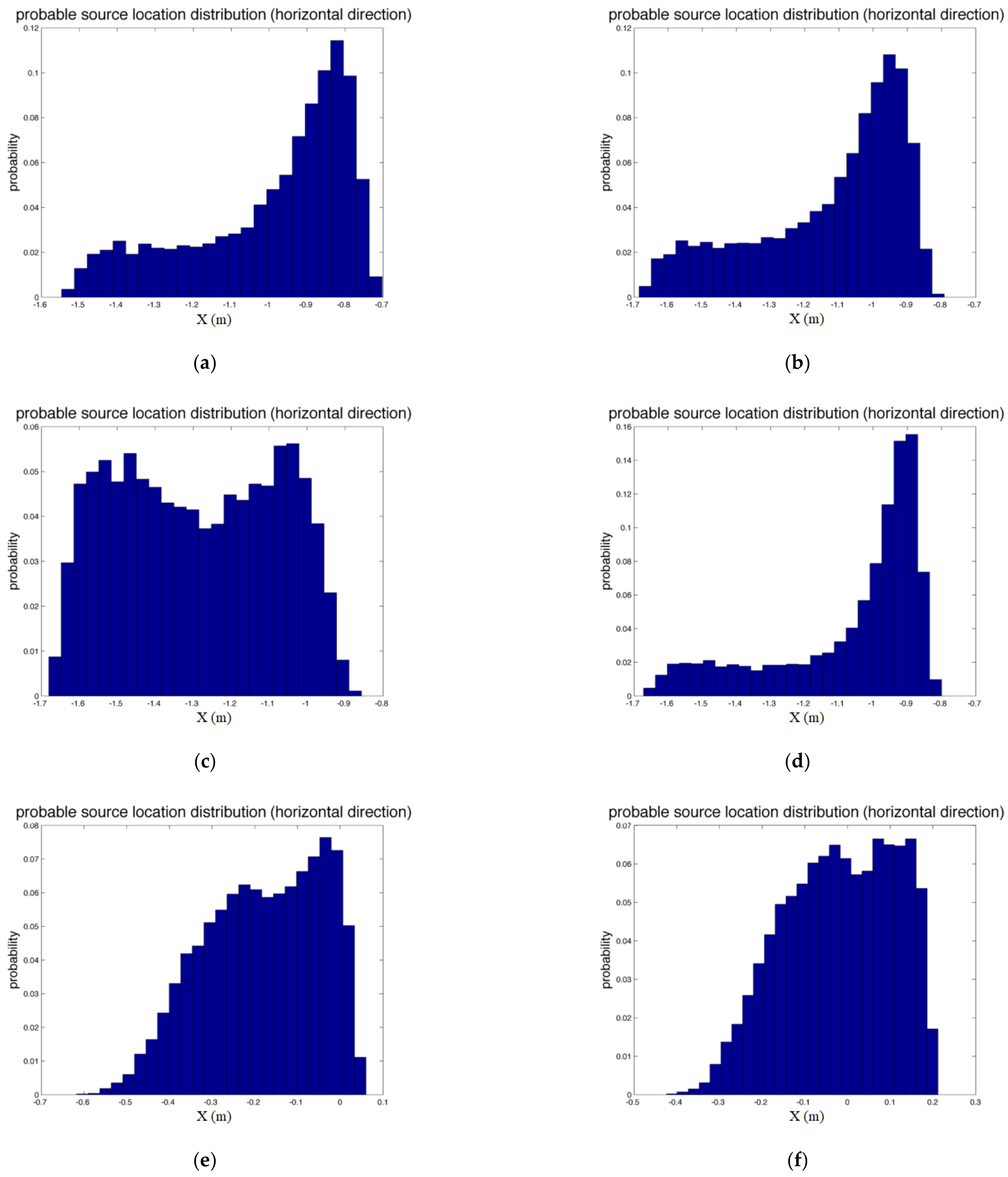
Figure 3a,b,d), most of the particles accumulated near the riverbed. Furthermore, with regard to the x-direction, the particles in the near-bed region are closer to the deposition location while those that remain at the surface are farther from that location. This fact may be attributed to the use of the logarithmic velocity distribution, which is larger near the surface, and has the potential to drift particles on the water surface farther. Since the simulation is not run for a long enough time to allow all of the particles to reach the water surface, in more than half of the 10,000 simulations, particles did not arrive at the surface. Therefore, most particles are still close to the riverbed and remain close to the deposited location. Hence, the distribution of final particle locations in the x-direction is skewed toward the origin (
Figure 4a,b,d).
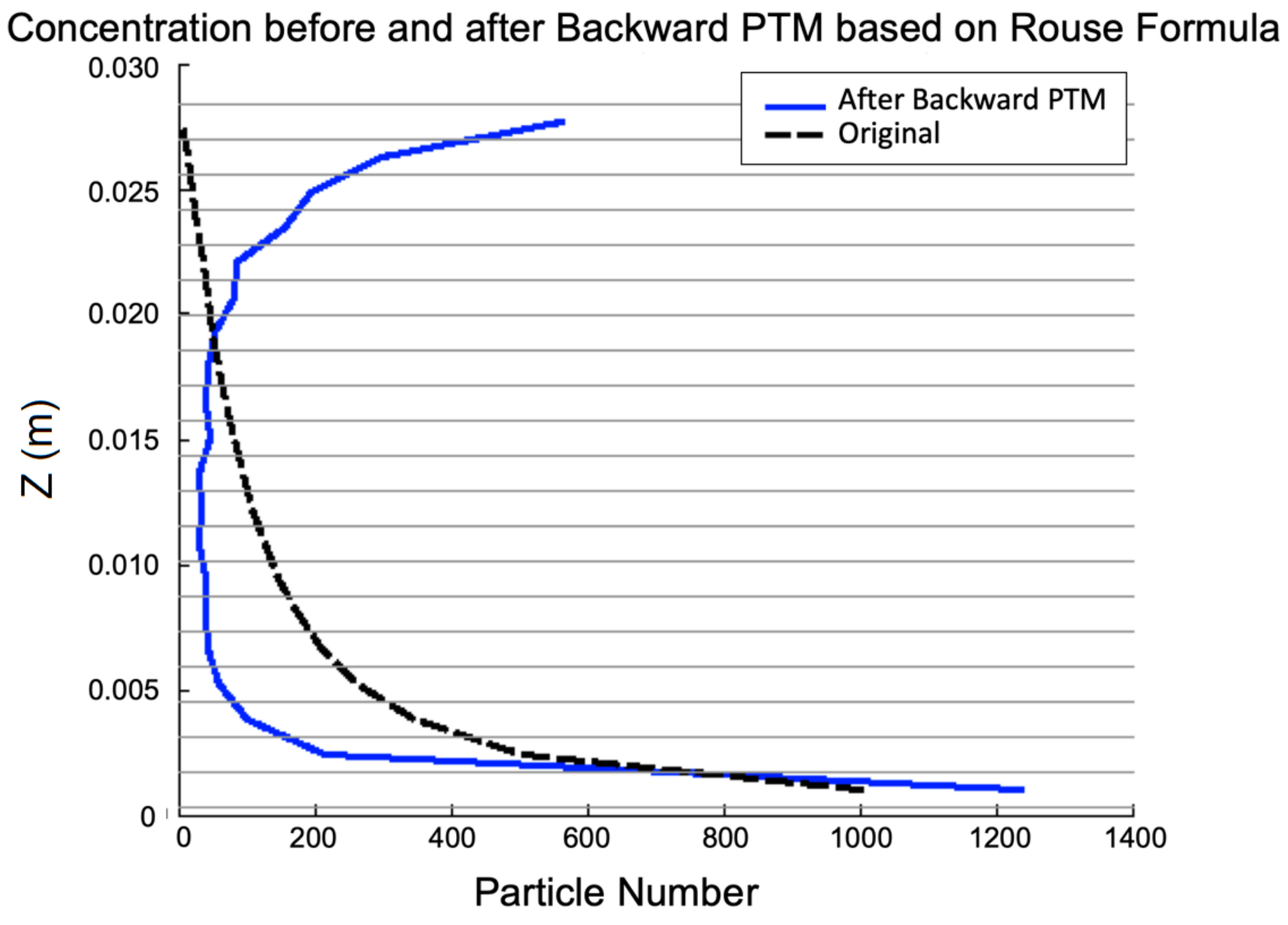
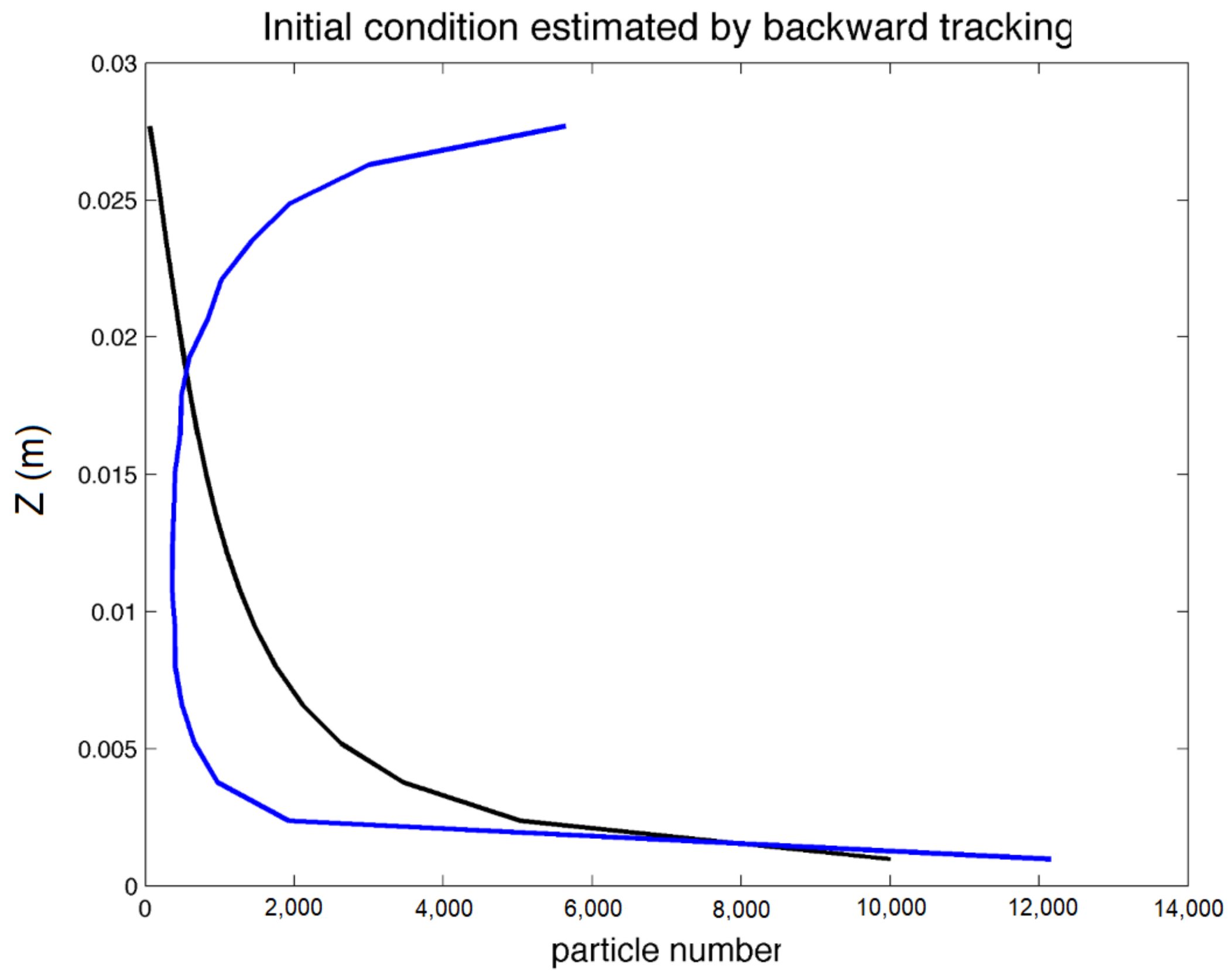
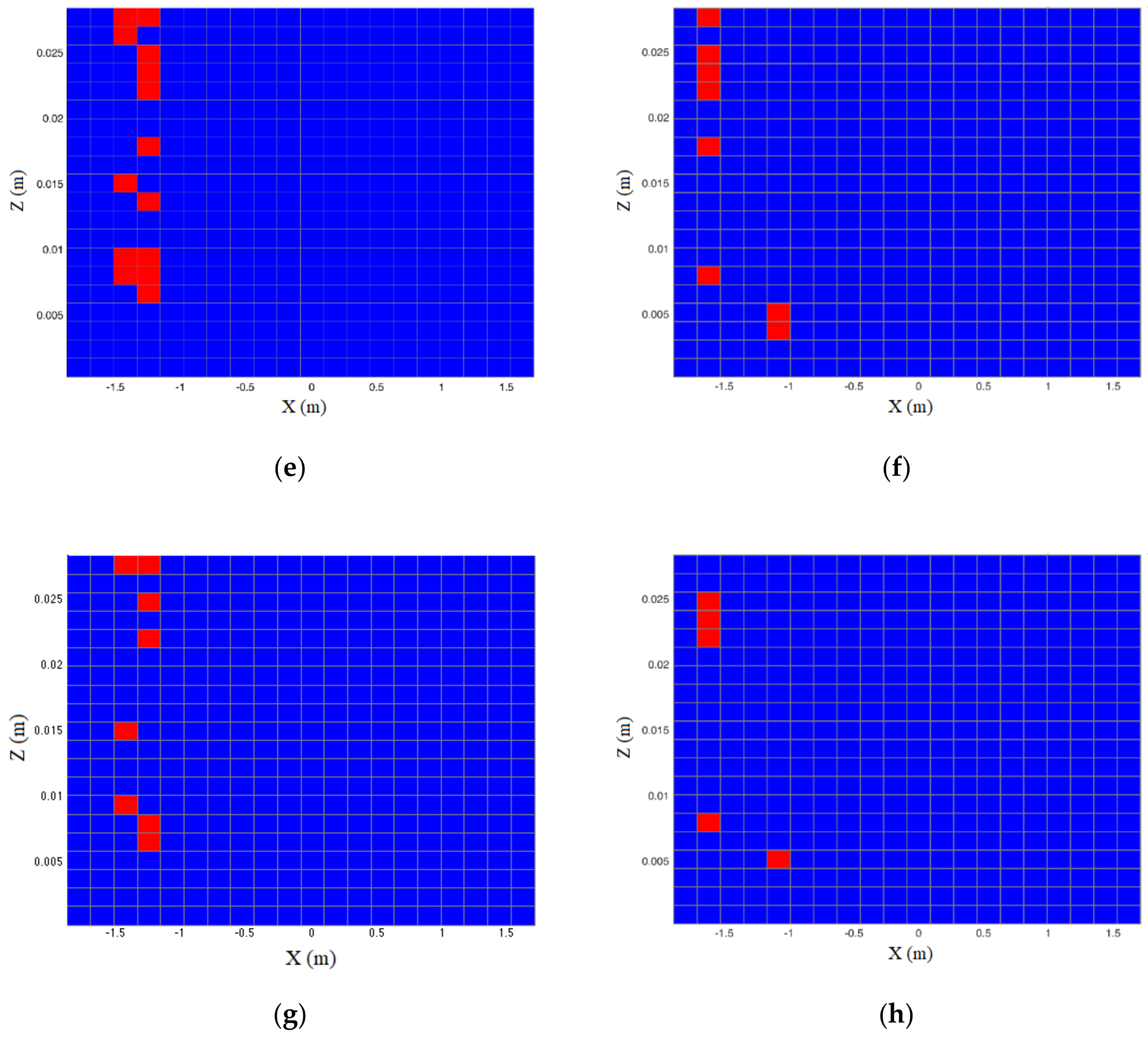
In the z-direction, the probabilities associated with final particle locations decrease sharply as z increases. Notably, the probability associated with the water surface is the second highest owing to the intrinsic characteristic of the governing equation in the z-direction when Rouse’s diffusivity is adopted (
Figure 5a,b). However, in tests in which the diffusivity of Absi et al. [
38]. is used, the probability that a particle is at the water surface is high and the probability that a particle is in its neighborhood is non-zero (
Figure 5c,d). On account of the logarithmically distributed mean drift flow velocity in the horizontal direction, a higher z may be correlated with a greater distance traveled by a particle. As a result, the distribution in the x-direction has two humps because the probability that a particle is near the riverbed or the surface is higher than the probability that it is in any other region. Furthermore, particles are distributed more uniformly in the explicit backward case in which the diffusivity of Absi et al. [
38] is used.
The variances of particle positions in both directions increase with time. However, the variance in the x-direction increases continuously with time while that in the z-direction tends to an asymptote. In x-direction, uncertainty is caused by the re-suspension mechanism and sediment concentration gradients in the streamwise direction. Such concentration gradients may cause the shear in the flow to mix particles out which cause the variance to grow in time. If a particle is not re-suspended, then it would stagnate at its location for some time. Therefore, the variability in the stream-wise direction continues to increase. In the vertical direction, the variance initially increases because of the turbulence term. Additionally, it tends to reach an asymptotic constant (or may even decrease if the simulation time is very long) as more particles reach the water surface and their vertical positions cease to change.
Two forward tests yield insignificantly different results. The overall trajectory is downward in the downstream direction of the channel. According to
Figure 5e,f, approximately one-fifth to one-fourth of particles are near the bed. The total number of particles decreases as z increases. Since the overall trend is downward, few particles stay close to the water surface. Two peak values are observed in the distributions in the x-direction at the final time. The left peak is attributable to a large number of particles near the bed, which are transported over short distances. The right peak is attributable to particles that might have arrived from a higher region where flow is fast enough to move particles farther.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

























