Inelastic Deformable Image Registration (i-DIR): Capturing Sliding Motion through Automatic Detection of Discontinuities


Abstract
1. Introduction
2. Materials and Methods
2.1. Deformable Image Registration Elastic Formulation
2.2. The Inelastic Deformable Image Registration (I-Dir) Method
2.3. Time and Space Discretization
2.4. Performance Assessment and Metrics
2.5. Parameter Settings
3. Results
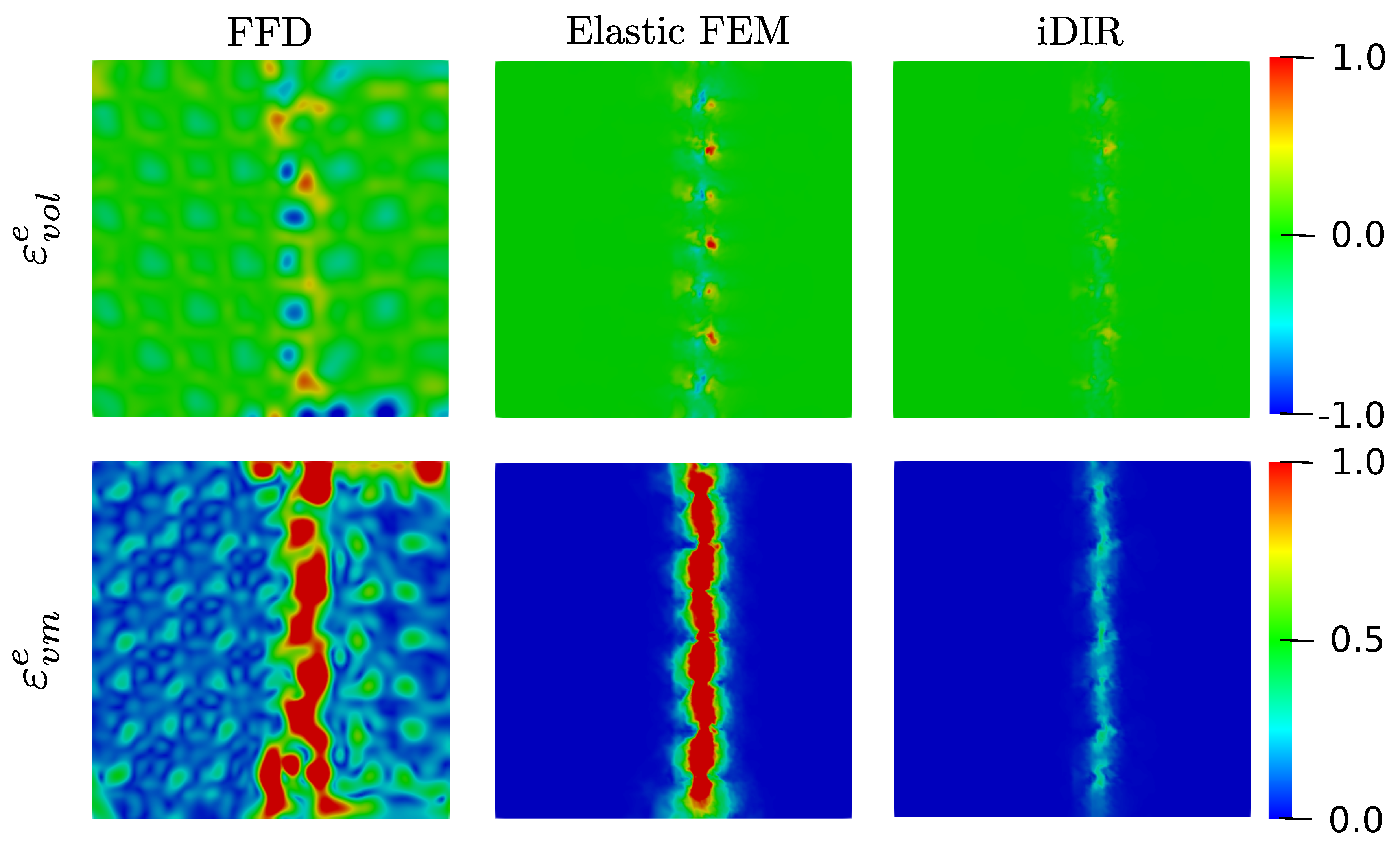
3.1. Synthetic Dataset with Sliding Motion
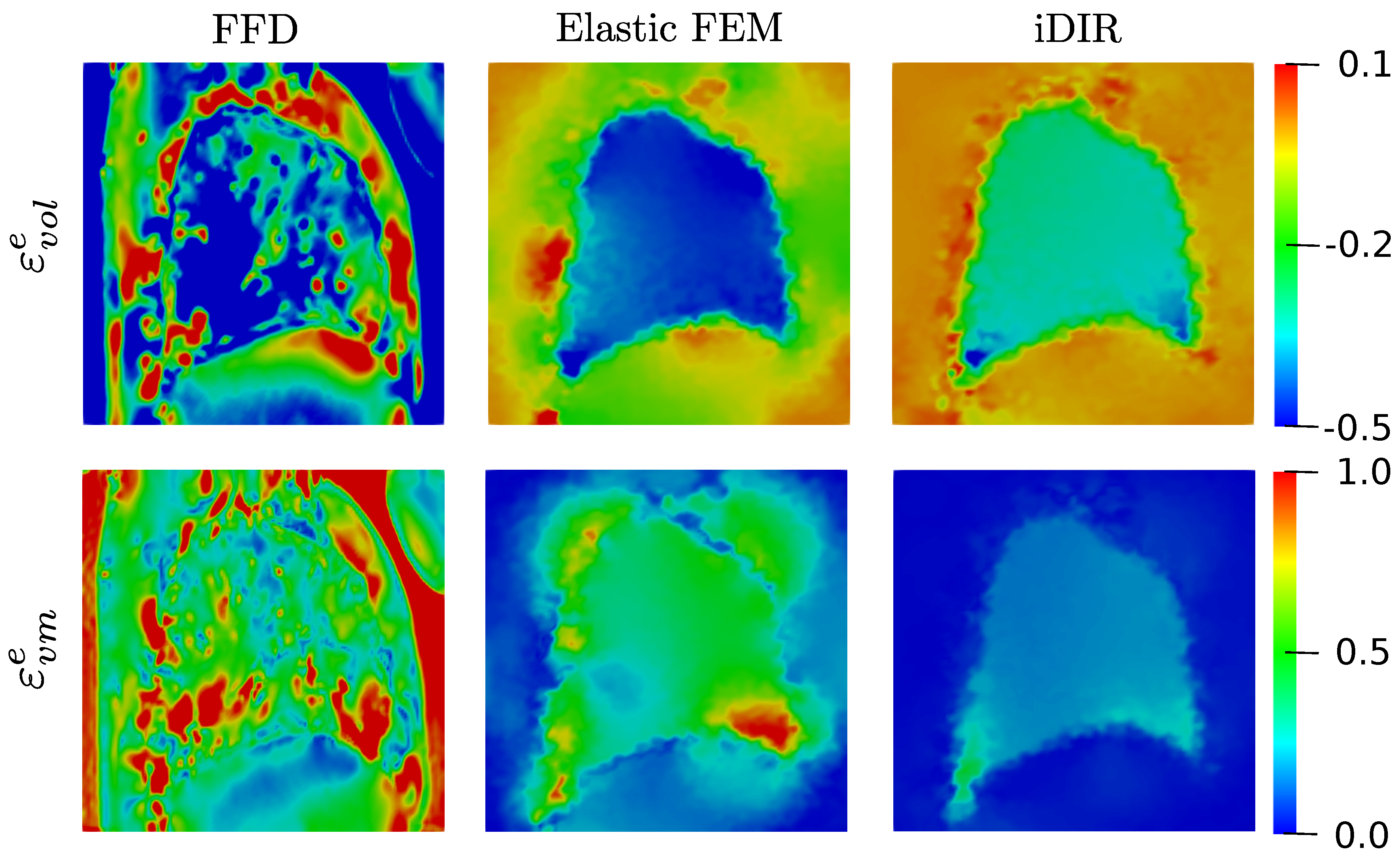
3.2. Registration of Lung CT Images
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| i-DIR | Inelastic deformable image registration |
| FEM | Finite element method |
| FFD | Free form deformation |
| TLC | Total lung capacity |
| FRC | Functional residual capacity |
| CT | Computed tomography |
| RSS | Residual sum of squared differences |
| TRE | Target registration error |
Appendix A. Mathematical Definitions and Demonstrations
Appendix A.1. Relation between the Rate of Plastic Strain and the Internal Variables
Appendix A.2. Incremental Flow Rule Update
Appendix A.3. Return Mapping Algorithm
- (i)
- (ii)
- A plastic corrector, where we have two possible cases:(a) if the elastic trial lies within the elastic domainthere is no plastic evolution within the time interval , and therefore we update our variables:and(b) otherwise, we have plastic flow (or elasto-plastic evolution). By a traditional Newton-Raphson linearization we solve the followingand then we update the following variables at ,where K is the bulk modulus, is the unit plastic flow vector and is the fourth order deviatoric projection tensor defined as,with as the fourth order symmetric identity tensor.
Appendix A.4. Effective Incremental Energy
Appendix A.5. Finite-Element Discretization of the I-Dir Formulation
References
- Sotiras, A.; Davatzikos, C.; Paragios, N. Deformable medical image registration: A survey. IEEE Trans. Med Imaging 2013, 32, 1153–1190. [Google Scholar] [CrossRef]
- Modersitzki, J. Numerical Methods for Image Registration; Oxford University Press: Oxford, UK, 2003; p. 199. [Google Scholar]
- Rueckert, D.; Sonoda, L.I.; Hayes, C.; Hill, D.L.; Leach, M.O.; Hawkes, D.J. Nonrigid registration using free-form deformations: Application to breast MR images. IEEE Trans. Med. Imaging 1999, 18, 712–721. [Google Scholar] [CrossRef] [PubMed]
- Ashburner, J. A fast diffeomorphic image registration algorithm. NeuroImage 2007, 38, 95–113. [Google Scholar] [CrossRef] [PubMed]
- Christensen, G.; Rabbitt, R.; Miller, M. Deformable template using large deformation kinematics. IEEE Trans. Image Process. 1996, 5, 1435–1447. [Google Scholar] [CrossRef] [PubMed]
- Reinhardt, J.M.; Ding, K.; Cao, K.; Christensen, G.E.; Hoffman, E.A.; Bodas, S.V. Registration-based estimates of local lung tissue expansion compared to xenon CT measures of specific ventilation. Med. Image Anal. 2008, 12, 752–763. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, F.P.; Tavares, J.M.R. Medical image registration: A review. Comput. Methods Biomech. Biomed. Eng. 2014, 17, 73–93. [Google Scholar] [CrossRef]
- Foskey, M.; Davis, B.; Goyal, L.; Chang, S.; Chaney, E.; Strehl, N.; Tomei, S.; Rosenman, J.; Joshi, S. Large deformation 3D image registration in image-guided radiation therapy. Phys. Med. Biol. 2005, 5869–5892. [Google Scholar] [CrossRef] [PubMed]
- Gering, D.T.; Nabavi, A.; Kikinis, R.; Grimson, W.E.L.; Hata, N.; Everett, P.; Jolesz, F.; Wells, W.M. An integrated visualization system for surgical planning and guidance using image fusion and interventional imaging. In Proceedings of the International Conference on Image Computing and Computer-Assisted Intervention—MICCAI, Cambridge, UK, 19–22 September 1999; pp. 809–819. [Google Scholar]
- Amelon, R.E.; Cao, K.; Ding, K.; Christensen, G.E.; Reinhardt, J.M.; Raghavan, M.L. Three-dimensional characterization of regional lung deformation. J. Biomech. 2011, 44, 2489–2495. [Google Scholar] [CrossRef]
- Hurtado, D.E.; Villarroel, N.; Retamal, J.; Bugedo, G.; Bruhn, A. Improving the accuracy of registration-based biomechanical analysis: A finite element approach to lung regional strain quantification. IEEE Trans. Med. Imaging 2016, 35, 580–588. [Google Scholar] [CrossRef]
- Jahani, N.; Choi, S.; Choi, J.; Iyer, K.; Hoffman, E.A.; Lin, C.l. Assessment of regional ventilation and deformation using 4D-CT imaging for healthy human lungs during tidal breathing. Appl. Physiol. 2015, 1064–1074. [Google Scholar] [CrossRef]
- Hurtado, D.E.; Villarroel, N.; Andrade, C.; Retamal, J.; Bugedo, G.; Bruhn, A. Spatial patterns and frequency distributions of regional deformation in the healthy human lung. Biomech. Model. Mechanobiol. 2017, 16, 1413–1423. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Hoffman, E.A.; Wenzel, S.E.; Tawhai, M.H.; Yin, Y.; Castro, M.; Lin, C.l. Registration-based assessment of regional lung function via volumetric CT images of normal subjects vs. severe asthmatics. Appl. Physiol. 2013, 115, 730–742. [Google Scholar] [CrossRef] [PubMed]
- Bodduluri, S.; Bhatt, S.P.; Hoffman, E.A.; Newell, J.D.; Martinez, C.H.; Dransfield, M.T.; Han, M.K.; Reinhardt, J.M.; COPDGene Investigators. Biomechanical CT metrics are associated with patient outcomes in COPD. Thorax 2017, 72, 409–414. [Google Scholar] [CrossRef] [PubMed]
- Retamal, J.; Hurtado, D.; Villarroel, N.; Bruhn, A.; Bugedo, G.; Amato, M.B.P.; Costa, E.L.V.; Hedenstierna, G.; Larsson, A.; Borges, J.B. Does Regional Lung Strain Correlate With Regional Inflammation in Acute Respiratory Distress Syndrome During Nonprotective Ventilation? An Experimental Porcine Study. Crit. Care Med. 2018, 46, e591–e599. [Google Scholar] [CrossRef]
- Hurtado, D.E.; Erranz, B.; Lillo, F.; Sarabia-Vallejos, M.; Iturrieta, P.; Morales, F.; Blaha, K.; Medina, T.; Diaz, F.; Cruces, P. Progression of regional lung strain and heterogeneity in lung injury: Assessing the evolution under spontaneous breathing and mechanical ventilation. Ann. Intensive Care 2020, 10, 107. [Google Scholar] [CrossRef]
- Cruces, P.; Retamal, J.; Hurtado, D.E.; Erranz, B.; Iturrieta, P.; González, C.; Diaz, F. A physiological approach to understand the role of respiratory effort in the progression of lung injury in SARS-CoV-2 infection. Crit. Care 2020, 24, 494. [Google Scholar] [CrossRef]
- Rodarte, J.R.; Hubmayr, R.D.; Stamenovic, D.; Walters, B.J. Regional lung strain in dogs during deflation from total lung capacity. Appl. Physiol. 1985, 58, 164–172. [Google Scholar] [CrossRef]
- Yin, Y.; Hoffman, E.A.; Lin, C.L. Lung Lobar Slippage Assessed with the Aid of Image Registration. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2010; Jiang, T., Navab, N., Pluim, J.P.W., Viergever, M.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 578–585. [Google Scholar]
- Von Siebenthal, M.; Székely, G.; Gamper, U.; Boesiger, P.; Lomax, A.; Cattin, P. 4D MR imaging of respiratory organ motion and its variability. Phys. Med. Biol. 2007, 52, 1547–1564. [Google Scholar] [CrossRef]
- Hua, R.; Pozo, J.M.; Taylor, Z.A.; Frangi, A.F. Multiresolution eXtended Free-Form Deformations (XFFD) for non-rigid registration with discontinuous transforms. Med. Image Anal. 2017, 36, 113–122. [Google Scholar] [CrossRef]
- Amelon, R.E.; Cao, K.; Reinhardt, J.M.; Christensen, G.E.; Raghavan, M.L. A measure for characterizing sliding on lung boundaries. Ann. Biomed. Eng. 2014, 42, 642–650. [Google Scholar] [CrossRef][Green Version]
- Hua, R.; Pozo, J.M.; Taylor, Z.A.; Frangi, A.F. Discontinuous Non-rigid Registration using Extended Free-Form Deformations. In Proceedings of the SPIE Medical Imaging 2015: Image Processing, Orlando, FL, USA, 21–26 February 2015; Volume 9413. [Google Scholar]
- Schmidt-Richberg, A.; Werner, R.; Handels, H.; Ehrhardt, J. Estimation of slipping organ motion by registration with direction-dependent regularization. Med. Image Anal. 2012, 16, 150–159. [Google Scholar] [CrossRef] [PubMed]
- Pace, D.F.; Aylward, S.R.; Niethammer, M. A Locally Adaptive Regularization Based on Anisotropic Diffusion for Deformable Image Registration of Sliding Organs. IEEE Trans. Med. Imaging 2013, 32, 2114–2126. [Google Scholar] [CrossRef] [PubMed]
- Delmon, V.; Rit, S.; Pinho, R.; Sarrut, D. Registration of sliding objects using direction dependent B-splines decomposition. Phys. Med. Biol. 2013, 58, 1303–1314. [Google Scholar] [CrossRef]
- Thirion, J.P. Image matching as a diffusion process: An analogy with Maxwell’s demons. Med. Image Anal. 1998, 2, 243–260. [Google Scholar] [CrossRef]
- Wu, Z.; Rietzel, E.; Boldea, V.; Sarrut, D.; Sharp, G.C. Evaluation of deformable registration of patient lung 4DCT with subanatomical region segmentations. Med. Phys. 2008, 35, 775–781. [Google Scholar] [CrossRef]
- Barnafi, N.A.; Gatica, G.N.; Hurtado, D.E. Primal and Mixed Finite Element Methods for Deformable Image Registration Problems. SIAM J. Imaging Sci. 2018, 11, 2529–2567. [Google Scholar] [CrossRef]
- Rueckert, D.; Schnabel, J.A. Medical Image Registration. In Biomedical Image Processing; Deserno, T.M., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 131–154. [Google Scholar]
- Schmidt-Richberg, A. Registration Methods for Pulmonary Image Analysis; Springer Vieweg: Wiesbaden, Germany, 2013. [Google Scholar]
- Wells, W.M.; Viola, P.; Atsumi, H.; Nakajima, S.; Kikinis, R. Multi-modal volume registration by maximization of mutual information. Med. Image Anal. 1996, 1, 35–51. [Google Scholar] [CrossRef]
- Lu, W.; Chen, M.L.; Olivera, G.H.; Ruchala, K.J.; Mackie, T.R. Fast free-form deformable registration via calculus of variations. Phys. Med. Biol. 2004, 49, 3067–3087. [Google Scholar] [CrossRef]
- Lubliner, J. Plasticity Theory; Dover Publications: Mineola, NY, USA, 2013; p. 544. [Google Scholar]
- De Souza Neto, E.A.; Perić, D.; Owen, D.R.J. Computational Methods for Plasticity: Theory and Applications; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Radovitzky, R.; Ortiz, M. Error estimation and adaptive meshing in strongly nonlinear dynamic problems. Comput. Methods Appl. Mech. Eng. 1999, 172, 203–240. [Google Scholar] [CrossRef]
- Ortiz, M.; Stainier, L. The variational formulation of viscoplastic constitutive updates. Comput. Methods Appl. Mech. Eng. 1999, 171, 419–444. [Google Scholar] [CrossRef]
- Hurtado, D.E.; Ortiz, M. Finite element analysis of geometrically necessary dislocations in crystal plasticity. Int. J. Numer. Methods Eng. 2013, 93, 66–79. [Google Scholar] [CrossRef]
- Hurtado, D.E.; Henao, D. Gradient flows and variational principles for cardiac electrophysiology: Toward efficient and robust numerical simulations of the electrical activity of the heart. Comput. Methods Appl. Mech. Eng. 2014, 273, 238–254. [Google Scholar] [CrossRef]
- Modat, M.; Mcclelland, J.; Ourselin, S. Lung registration using the NiftyReg package. In Proceedings of the 13th International Conference on Medical Image Computing and Computer Assisted Intervention, MICCAI2010 Workshop: Medical Image Analysis for the Clinic—A Grand Challenge 2010, Beijing, China, 20–24 September 2010; pp. 33–42. [Google Scholar]
- Cao, K.; Christensen, G.E.; Ding, K.; Du, K.; Raghavan, M.L.; Amelon, R.E.; Baker, K.M.; Hoffman, E.A.; Reinhardt, J.M. Tracking regional tissue volume and function change in lung using image registration. Int. J. Biomed. Imaging 2012, 2012, 956248. [Google Scholar] [CrossRef] [PubMed]
- Genet, M.; Stoeck, C.T.; Von Deuster, C.; Lee, L.C.; Kozerke, S. Equilibrated warping: Finite element image registration with finite strain equilibrium gap regularization. Med. Image Anal. 2018, 50, 1–22. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 0.1 | |
| H |
| Model | RSS | TRE |
|---|---|---|
| FFD | 16.32 | 1.17 |
| Elastic FEM | 3.19 | 0.46 |
| i-DIR | 0.28 | 0.22 |
| Model | RSS | TRE | TRE |
|---|---|---|---|
| (Inside-Lung Landmarks) | (Rib Landmarks) | ||
| FFD | 11.64 | 6.82 | 13.98 |
| Elastic FEM | 13.25 | 6.74 | 13.68 |
| i-DIR | 12.24 | 6.99 | 0.77 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrade, C.I.; Hurtado, D.E. Inelastic Deformable Image Registration (i-DIR): Capturing Sliding Motion through Automatic Detection of Discontinuities. Mathematics 2021, 9, 97. https://doi.org/10.3390/math9010097
Andrade CI, Hurtado DE. Inelastic Deformable Image Registration (i-DIR): Capturing Sliding Motion through Automatic Detection of Discontinuities. Mathematics. 2021; 9(1):97. https://doi.org/10.3390/math9010097
Chicago/Turabian StyleAndrade, Carlos I., and Daniel E. Hurtado. 2021. "Inelastic Deformable Image Registration (i-DIR): Capturing Sliding Motion through Automatic Detection of Discontinuities" Mathematics 9, no. 1: 97. https://doi.org/10.3390/math9010097
APA StyleAndrade, C. I., & Hurtado, D. E. (2021). Inelastic Deformable Image Registration (i-DIR): Capturing Sliding Motion through Automatic Detection of Discontinuities. Mathematics, 9(1), 97. https://doi.org/10.3390/math9010097