Improving Stability Conditions for Equilibria of SIR Epidemic Model with Delay under Stochastic Perturbations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Some Auxiliary Definitions and Statements
- -
- mean square stable if for each there exists a such that , , provided that ;
- -
- asymptotically mean square stable if it is mean square stable and for each initial function ϕ the solution of the system (12) satisfies the condition ;
- -
- exponentially mean square stable if it is mean square stable and there exists such that for each initial function ϕ there exists (which may depend on ϕ) such that for .
3. Stability of Equilibria
3.1. The First Stability Condition
3.2. The Second Stability Condition
3.3. The Third Stability Condition
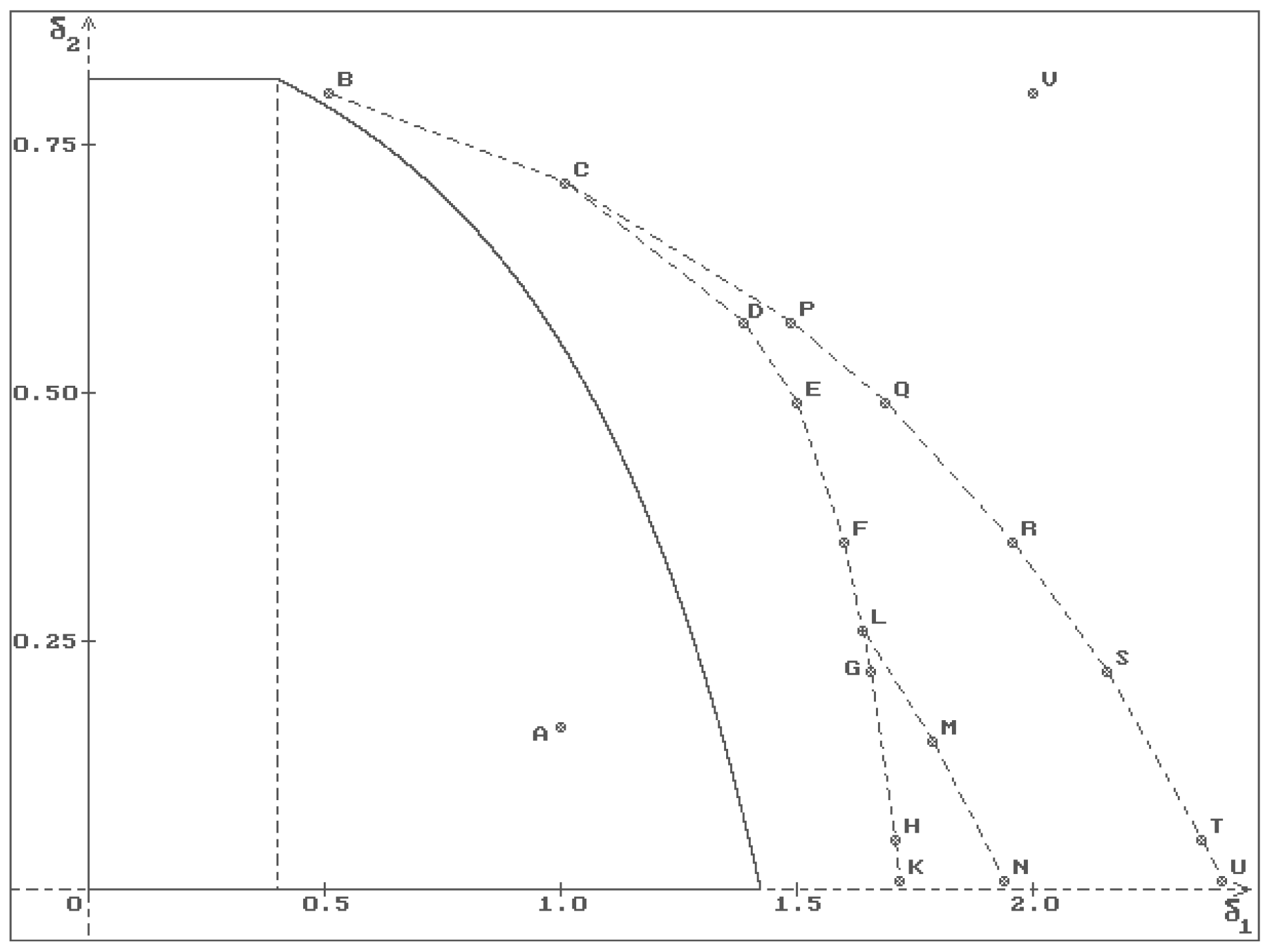
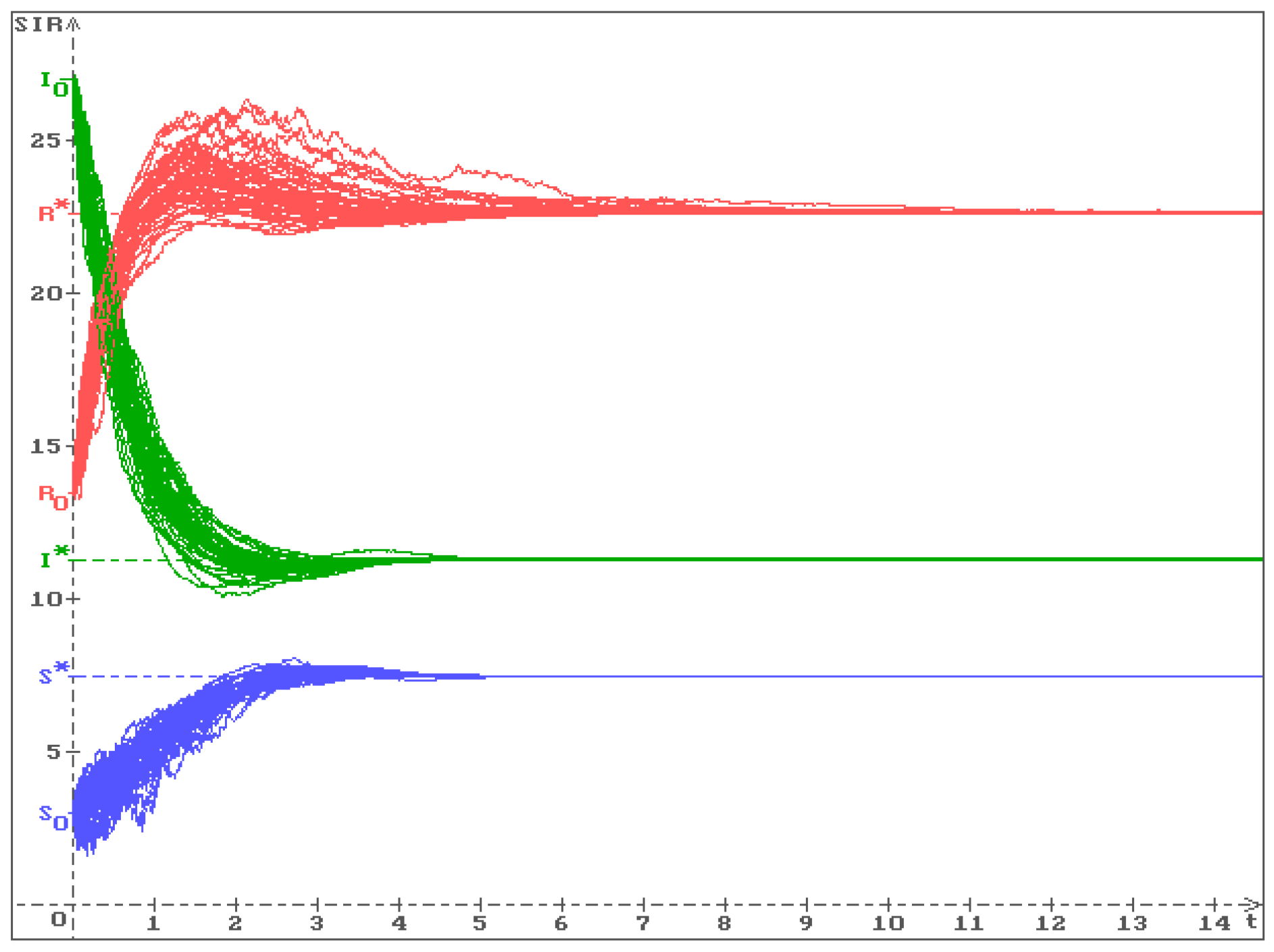
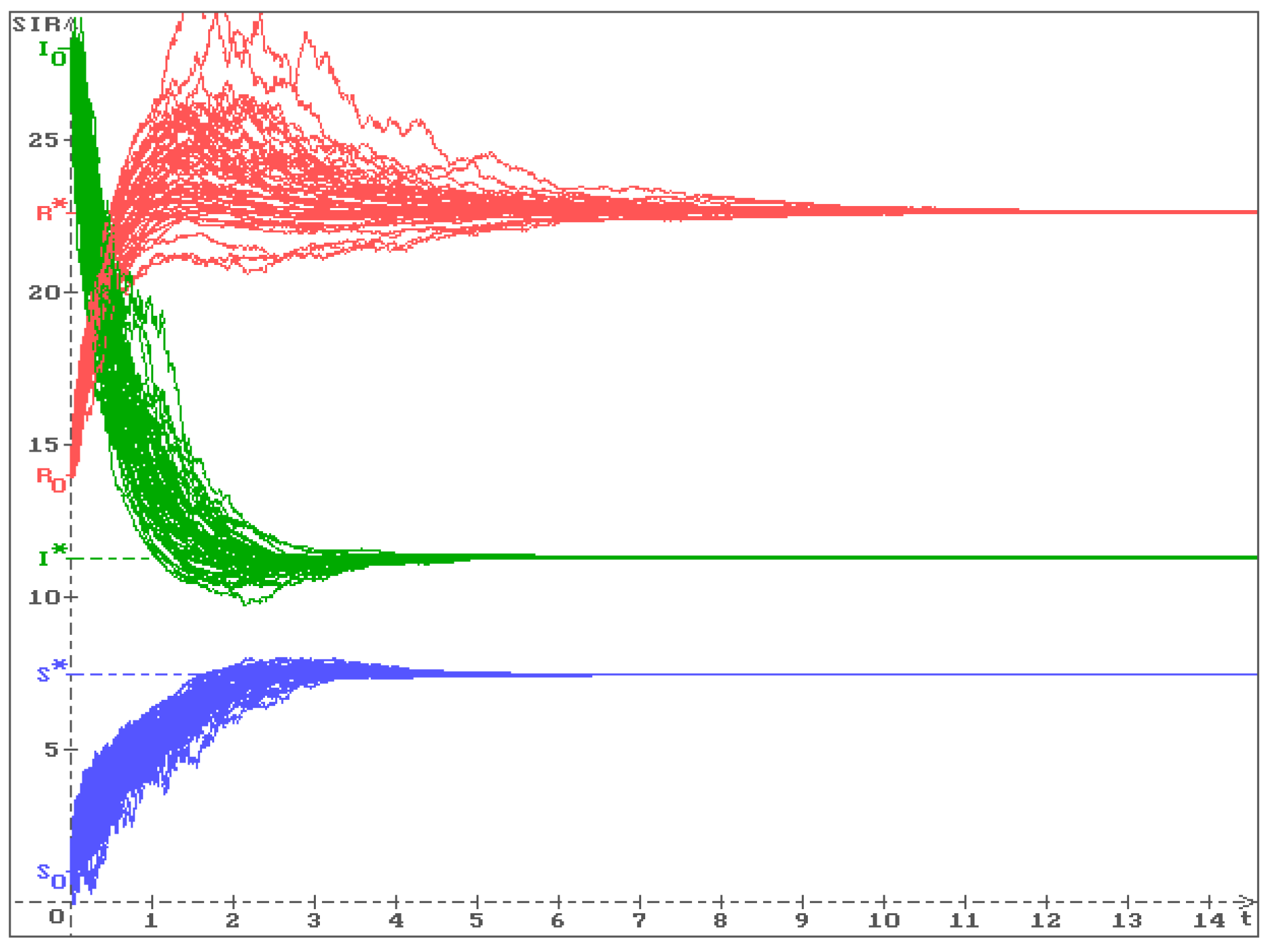
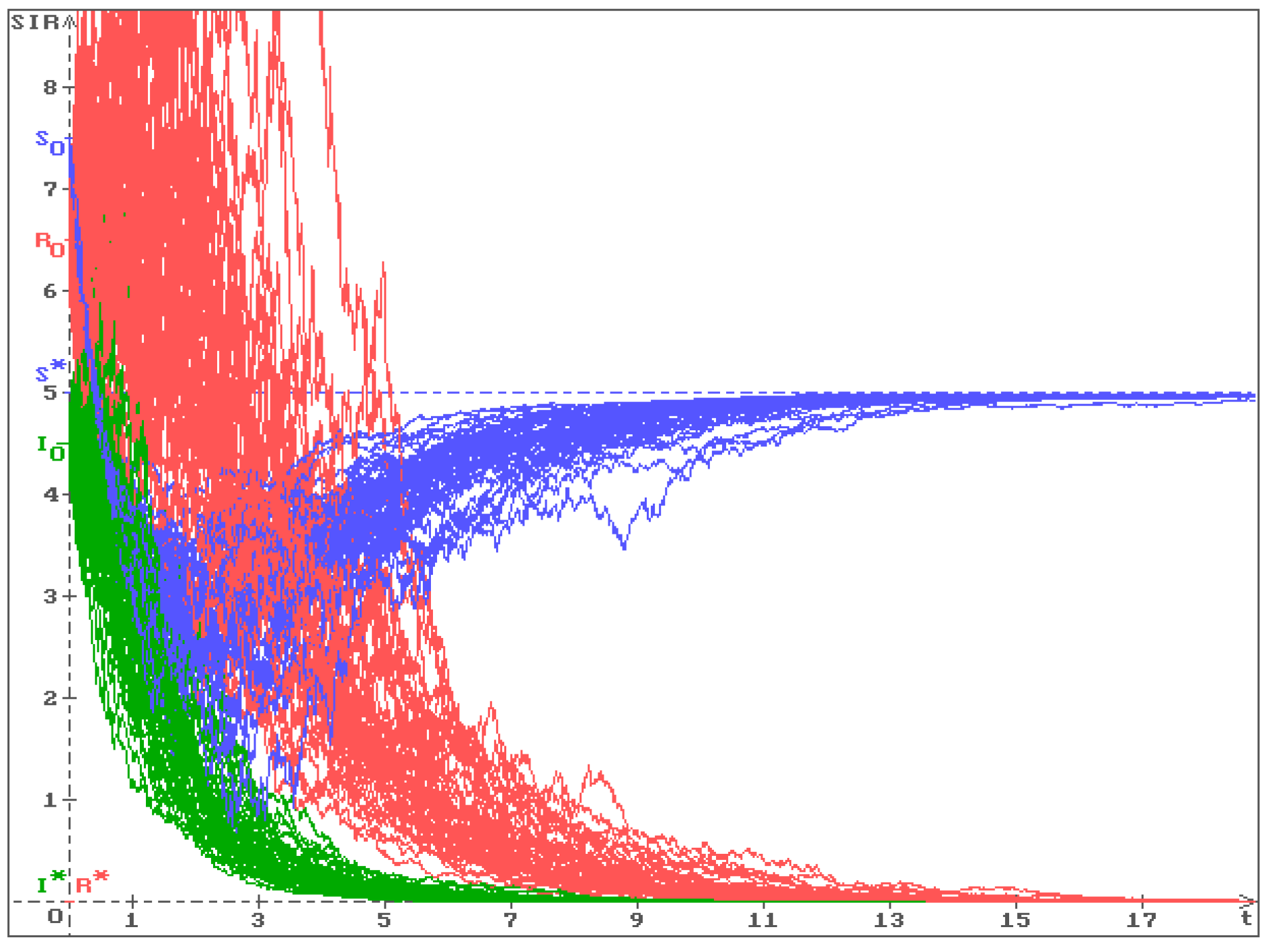
3.4. Numerical Simulations
4. Conclusions
Funding
Conflicts of Interest
References
- Ball, F.; Shaw, L. Estimating the within-household infection rate in emerging SIR epidemics among a community of households. J. Math. Biol. 2015, 71, 1705–1735. [Google Scholar] [CrossRef]
- Beretta, E.; Kolmanovskii, V.; Shaikhet, L. Stability of epidemic model with time delays influenced by stochastic perturbations. Math. Comput. Simul. 1998, 45, 269–277. [Google Scholar] [CrossRef]
- Beretta, E.; Takeuchi, Y. Global stability of an SIR epidemic model with time delays. J. Math. Biol. 1995, 33, 250–260. [Google Scholar] [CrossRef] [PubMed]
- Calatayud, J.; Cortes, J.C.; Jornet, M. Computing the density function of complex models with randomness by using polynomial expansions and the RVT technique. Application to the SIR epidemic model. Chaos Solitons Fractals 2020, 133, 109639. [Google Scholar] [CrossRef]
- Casagrandi, R.; Bolzoni, L.; Levin, S.A.; Andreasen, V. The SIRC model and influenza A. Math. Biosci. 2006, 200, 152–169. [Google Scholar] [CrossRef]
- Chen, G.; Li, T.; Liu, C. Lyapunov exponent of a stochastic SIR model. C. R. Math. 2013, 351, 33–35. [Google Scholar] [CrossRef]
- Dieu, N.T.; Nguyen, D.H.; Du, N.H.; Yin, G. Classification of Asymptotic Behavior in a Stochastic SIR Model. SIAM J. Appl. Dyn. Syst. 2016, 15, 1062–1084. [Google Scholar] [CrossRef]
- Gao, N.; Song, Y.; Wang, X.; Liu, J. Dynamics of a stochastic SIS epidemic model with nonlinear incidence rates. Adv. Differ. Equ. 2019, 2019, 41. [Google Scholar] [CrossRef] [Green Version]
- Gray, A.; Greenhalgh, D.; Hu, L.; Mao, X.; Pan, J. A stochastic differential equation SIS epidemic model. SIAM J. Appl. Math. 2011, 71, 876–902. [Google Scholar] [CrossRef] [Green Version]
- Gray, A.; Greenhalgh, D.; Mao, X.; Pan, J. The SIS epidemic model with Markovian switching. J. Math. Anal. Appl. 2012, 394, 496–516. [Google Scholar] [CrossRef] [Green Version]
- Ji, C.; Jiang, D. Threshold behaviour of a stochastic SIR model. Appl. Math. Model. 2014, 38, 5067–5079. [Google Scholar] [CrossRef]
- Ji, C.; Jiang, D.; Shi, N. The behavior of an SIR epidemic model with stochastic perturbation. Stoch. Anal. Appl. 2012, 30, 755–773. [Google Scholar] [CrossRef]
- Jiang, D.; Ji, C.; Shi, N.; Yu, J. The long time behavior of DI SIR epidemic model with stochastic perturbation. J. Math. Anal. Appl. 2010, 372, 162–180. [Google Scholar] [CrossRef] [Green Version]
- Korobeinikov, A. Global properties of SIR and SEIR epidemic models with multiple parallel infectious stages. Bull. Math. Biol. 2009, 71, 5–83. [Google Scholar] [CrossRef] [PubMed]
- Korobeinikov, A. Lyapunov functions and global properties for SEIR and SEIS epidemic models. Math. Med. Biol. 2004, 21, 75–83. [Google Scholar] [CrossRef] [PubMed]
- Kuske, R.; Gordillo, L.; Greenwood, P. Sustained oscillations via coherence resonance in SIR. J. Theor. Biol. 2007, 245, 459–469. [Google Scholar] [CrossRef]
- Lahrouz, A.; Settati, A. Qualitative Study of a Nonlinear Stochastic SIRS Epidemic System. Stoch. Anal. Appl. 2014, 32, 992–1008. [Google Scholar] [CrossRef]
- Li, H.; Guo, S. Dynamics of a SIRC epidemiological model. Electron. J. Differ. Equ. 2017, 2017, 1–18. [Google Scholar]
- Liu, M.; Bai, C.; Wang, K. Asymptotic stability of a two-group stochastic SEIR model with infinite delays. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3444–3453. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.; Hayat, T.; Ahmad, B. Analysis of a delayed vaccinated SIR epidemic model with temporary immunity and Levy jumps. Nonlinear Anal. Hybrid Syst. 2018, 27, 29–43. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.; Shi, N.; Hayat, T.; Alsaedi, A. Stationary distribution and extinction of a stochastic SIRS epidemic model with standard incidence. Phys. A Stat. Mech. Appl. 2017, 469, 510–517. [Google Scholar] [CrossRef]
- Lu, Q. Stability of SIR system with random perturbations. Phys. A Stat. Mech. Appl. 2009, 388, 3677–3686. [Google Scholar] [CrossRef]
- Miao, A.; Zhang, T.; Zhang, J.; Wang, C. Dynamics of a stochastic SIR model with both horizontal and vertical transmission. J. Appl. Anal. Comput. 2018, 8, 1108–1121. [Google Scholar]
- Song, Y.; Miao, A.; Zhang, T.; Wang, X.; Liu, J. Extinction and persistence of a stochastic SIRS epidemic model with saturated incidence rate and transfer from infectious to susceptible. Adv. Differ. Equ. 2018, 2018, 293. [Google Scholar] [CrossRef] [Green Version]
- Tornatore, E.; Buccellato, S.M. On a stochastic SIR model. Appl. Math. 2007, 34, 389–400. [Google Scholar] [CrossRef]
- Tuckwell, H.C.; Williams, R.J. Some properties of a simple stochastic epidemic model of SIR type. Math. Biosci. 2007, 208, 76–97. [Google Scholar] [CrossRef]
- Vlasic, A.; Troy, D. Modeling stochastic anomalies in an SIS system. Stoch. Anal. Appl. 2017, 35, 27–39. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, T.; Xu, Y. Dynamical analysis of a diffusive SIRs model with general incidence rate. Discret. Contin. Dyn. Syst. Ser. B 2020, 25, 2433–2451. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Zhang, L.; Yuan, S. The effect of media coverage on threshold dynamics for a stochastic SIS epidemic model. Phys. A Stat. Mech. Appl. 2018, 512, 248–260. [Google Scholar] [CrossRef]
- Zhou, Y.; Yuan, S.; Zhao, D. Threshold behavior of a stochastic SIS model with jumps. Appl. Math. Comput. 2016, 275, 255–267. [Google Scholar]
- Shaikhet, L. Lyapunov Functionals and Stability of Stochastic Functional Differential Equations; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Gikhman, I.I.; Skorokhod, A.V. Stochastic Differential Equations; Springer: Berlin, Germany, 1972. [Google Scholar]
- Fridman, E.; Shaikhet, L. Simple LMIs for stability of stochastic systems with delay term given by Stieltjes integral or with stabilizing delay. Syst. Control Lett. 2019, 124, 83–91. [Google Scholar] [CrossRef]
- Burgos, C.; Cortes, J.C.; Shaikhet, L.; Villanueva, R.J. A nonlinear dynamic age-structured model of e-commerce in Spain: Stability analysis of the equilibrium by delay and stochastic perturbations. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 149–158. [Google Scholar] [CrossRef]
- Hale, J.K.; Verduyn Lunel, S.M. Introduction to Functional Differential Equations; Springer: New York, NY, USA, 1993. [Google Scholar]
- Fridman, E.; Shaikhet, L. Delay-induced stability of vector second-order systems via simple Lyapunov functionals. Automatica 2016, 74, 288–296. [Google Scholar] [CrossRef]
- Melchor-Aguilar, D.; Kharitonov, V.I.; Lozano, R. Stability conditions for integral delay systems. Int. J. Robust Nonlinear Control 2010, 20, 1–15. [Google Scholar] [CrossRef]
- Li, Z.Y.; Lam, J.; Wang, J. Stability analysis of linear stochastic neutral-type time-delay systems with two delays. Automatica 2018, 91, 179–189. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F.; Ariba, Y. Complete quadratic Lyapunov functionals for distributed delay systems. Automatica 2015, 62, 168–176. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Li, M.; Deng, F. Stability equivalence between the neutral delayed stochastic differential equations and the Euler-Maruyama numerical scheme. Appl. Numer. Math. 2018, 127, 370–386. [Google Scholar] [CrossRef]
- Pang, S.; Deng, F.; Mao, X. Almost sure and moment exponential stability of Euler-Maruyama discretizations for hybrid stochastic differential equations. J. Comput. Appl. Math. 2008, 213, 127–141. [Google Scholar] [CrossRef] [Green Version]






© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikhet, L. Improving Stability Conditions for Equilibria of SIR Epidemic Model with Delay under Stochastic Perturbations. Mathematics 2020, 8, 1302. https://doi.org/10.3390/math8081302
Shaikhet L. Improving Stability Conditions for Equilibria of SIR Epidemic Model with Delay under Stochastic Perturbations. Mathematics. 2020; 8(8):1302. https://doi.org/10.3390/math8081302
Chicago/Turabian StyleShaikhet, Leonid. 2020. "Improving Stability Conditions for Equilibria of SIR Epidemic Model with Delay under Stochastic Perturbations" Mathematics 8, no. 8: 1302. https://doi.org/10.3390/math8081302
APA StyleShaikhet, L. (2020). Improving Stability Conditions for Equilibria of SIR Epidemic Model with Delay under Stochastic Perturbations. Mathematics, 8(8), 1302. https://doi.org/10.3390/math8081302