Kinematics in Biology: Symbolic Dynamics Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Kinematics of Isolated Animal
- (1)
- Metabolism or internal dynamics as the only cause of motion: Isolated animal.
- (2)
- Motion is composed of discrete linear steps.
- (3)
- There is a maximal displacement, in one step, which is a consequence of the finite size of the animal and the finite energy at disposal.
- (4)
- Any step depends on the previous step taken: Markov hypothesis.
- (5)
- Differentiability/Continuity: close steps give origin to close steps.
- (6)
- Isotropy: there is no preferential direction for the motion.
- (7)
- One parameter characterizing the iterated process so that there exist for some values of the parameter, at least, one chaotic attractor.
- (a)
- From the assumption (1) the movement of an animal in isolation depends on its internal state or metabolism. This does not mean that the motion is simple. Moreover, the internal state of the animal may change with time and with the energy spent in the motion. Therefore, next to these basic assumptions we have to consider, theoretically and empirically, the dependence of patterns of motion according to the behavior associated with the internal states of the animal. This issue will be considered in future work in detail. Here, we simple aim to describe geometrically short time patches of trajectories, seen as templates or archetype movements, in which the animal behavior is ideally stable. An implicit assumption here is that we have a correspondence between animal behavior and the parameters determining the geometry trajectory.
- (b)
- If eventually, the empirical data shows that the trajectories are not well described by linear steps, then the assumption (2) can be read as the trajectories following approximately the linear step, that is, are contained in a rectangle of wide which contains the linear step. This point is discussed in Section 5.
- (c)
- There is no special reason for the assumption (5). The alternative would need eventually a cause or an explanation for the existing discontinuity or point without derivative. We could assume that there are discontinuity points (in a finite number) for some reason. Eventually, empirical data may require this adjustment. In future work we plan to deal with this issue.
- (d)
- The existence of a chaotic attractor assumed in (7) allows the simulation of the animal movement with a deterministic model. The variability of the trajectories is codified in the initial condition for the chaotic system and in its parameters. In a certain sense, due to the chaotic nature of the model we can see it as a pseudo random number generator which is adequate to produce typical trajectories with varied geometrical and statistical properties. We can chose initial conditions randomly or if we pretend a particular trajectory, with prescribed characteristics, we can obtain it, since the process is deterministic.
- (e)
- Different types of coordinates can be considered, using the above assumptions. We have tested polar coordinates and coupled Cartesian coordinates. However, in the present paper, as in Reference [10], we focus on Cartesian uncoupled coordinates. A general framework using matricial iteration is very promising and will be used in forthcoming paper. There are several reasons to focus, on a first approach, on the very simple iterated maps with uncoupled Cartesian coordinates: (1) its symbolic dynamics is well known, (2) the two or three dimensional trajectories can be reduced to one dimensional dynamics (3) the complexity of trajectories obtained is sufficiently interesting and varied to be analyzed.
- (f)
- Since we are considering isolated animal if there is symmetry breaking this means that the animal has in its internal processes a preference to some direction. For example, the possibility of detecting magnetic field, light, heat or other phenomena. This point is very interesting for certain classes of animals, however in this case we do not have isolation.
3. Bimodal Maps
3.1. Symbolic Dynamics for Bimodal Maps
3.2. Topological Markov Chain
4. Isentropic Motion and Unique Attractor Cases
4.1. Piecewise Linear Semi-Conjugation and Isentropics
4.2. Unique Critical Orbit
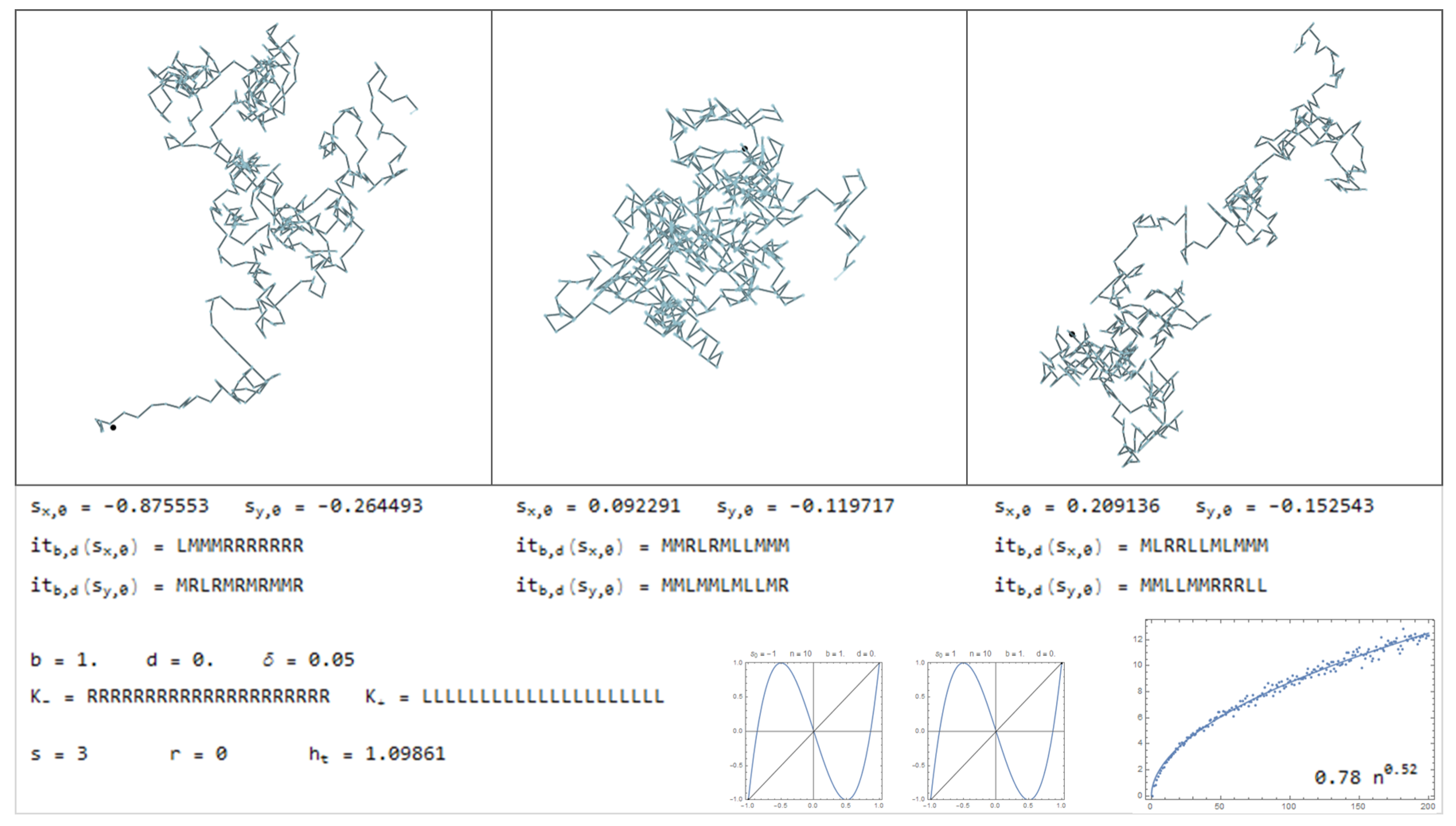
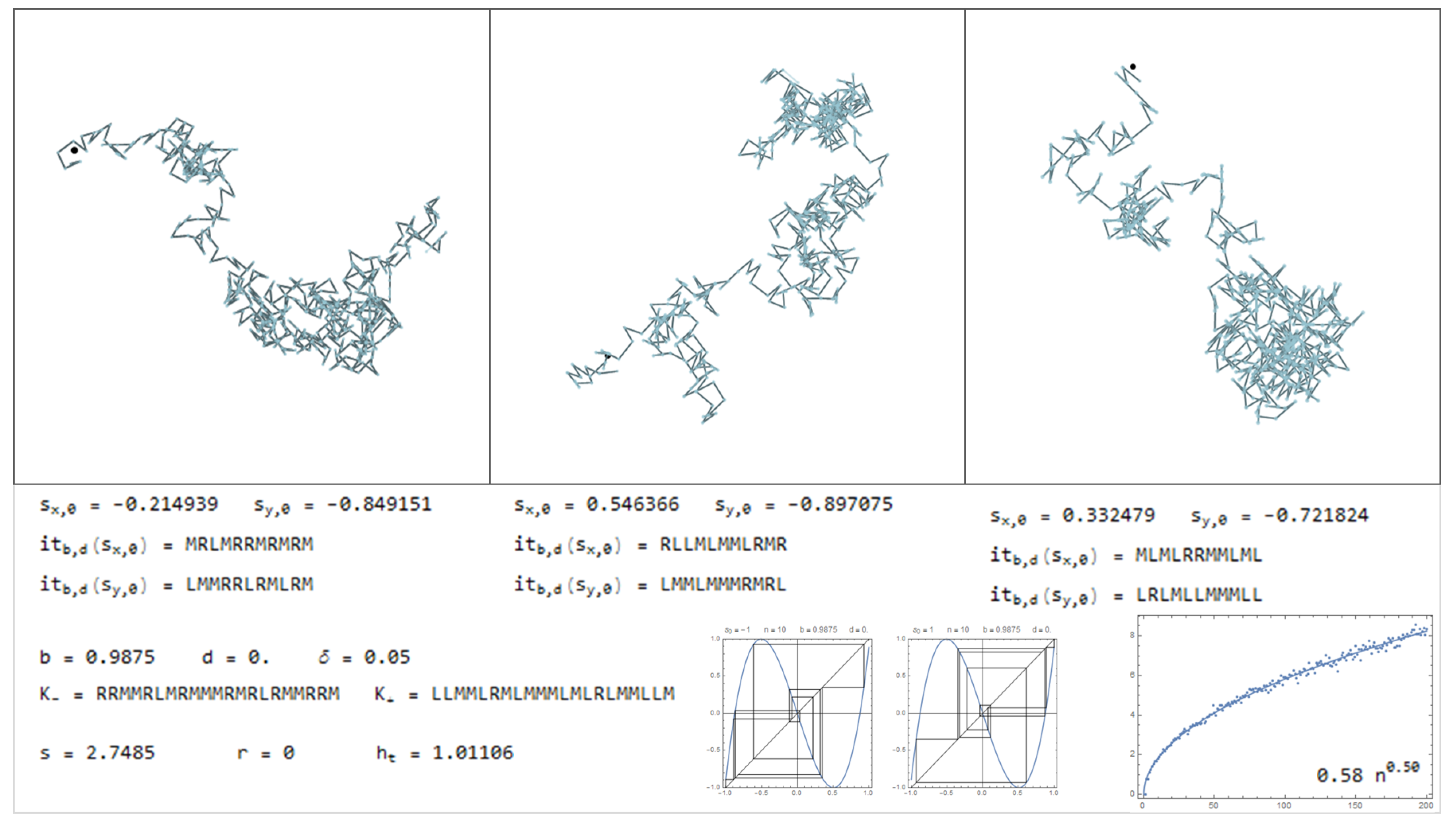
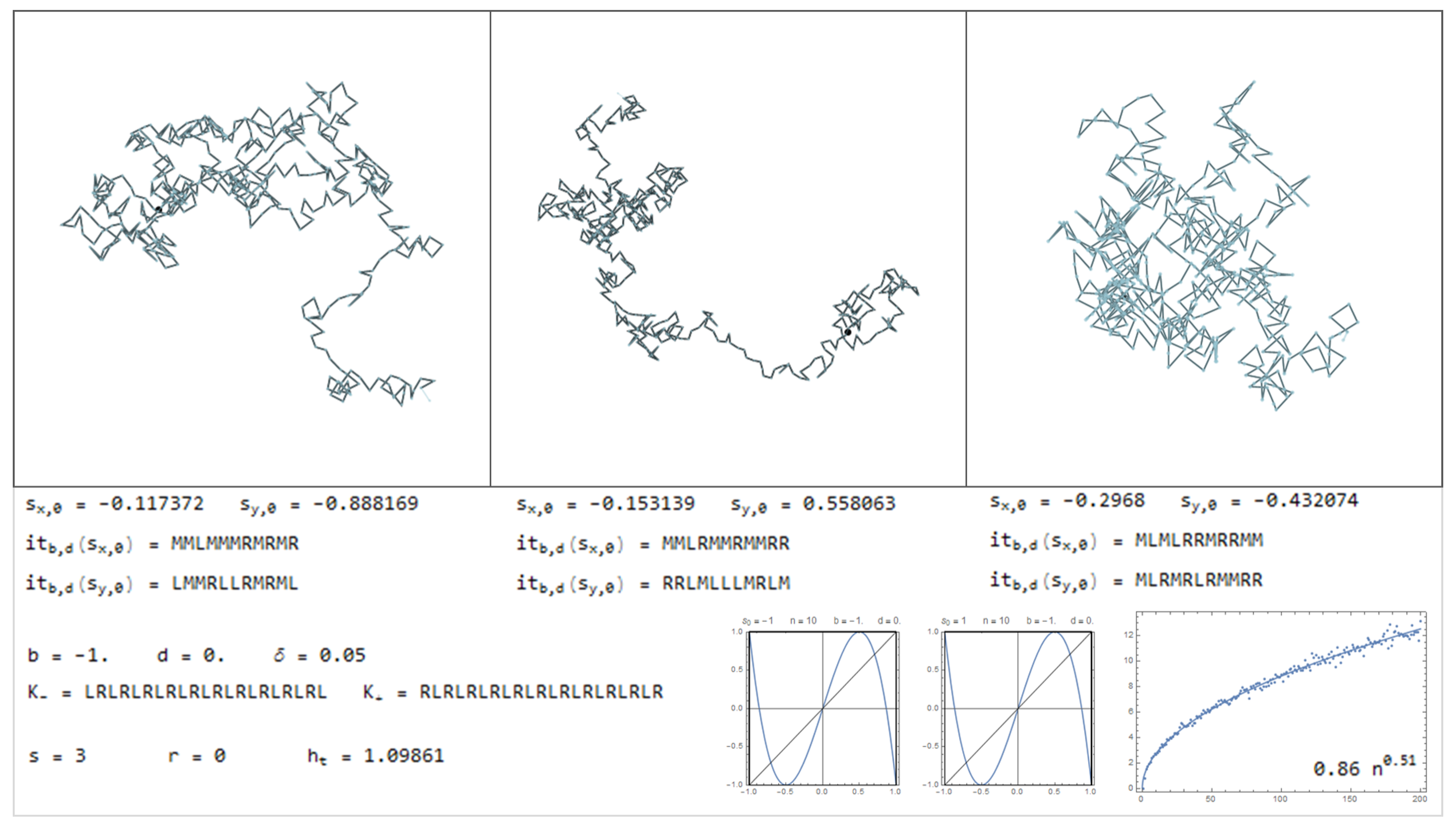
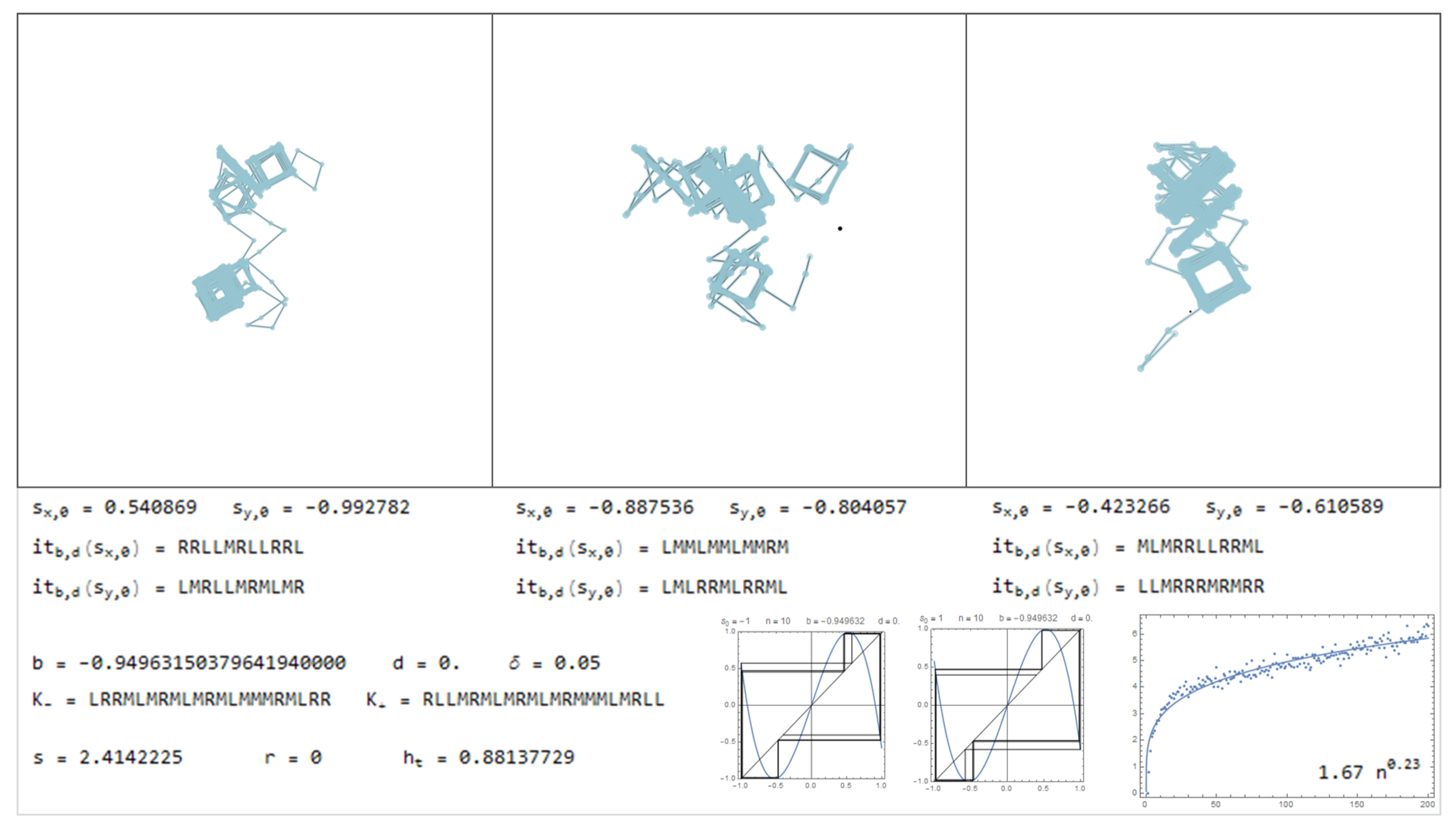
5. The Model—Cartesian Plane Motion
5.1. Definition
5.2. Interpretation of the Model
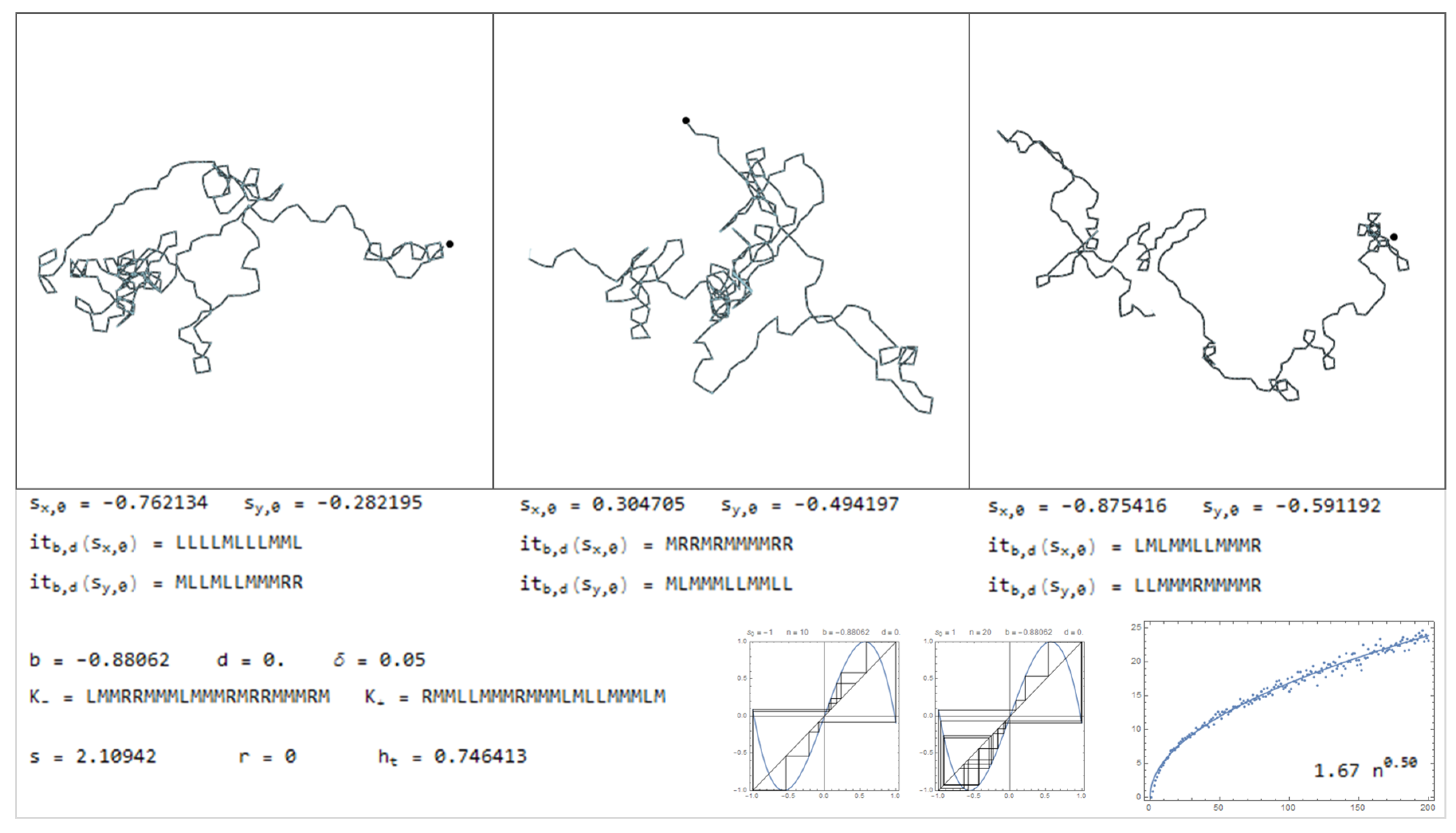
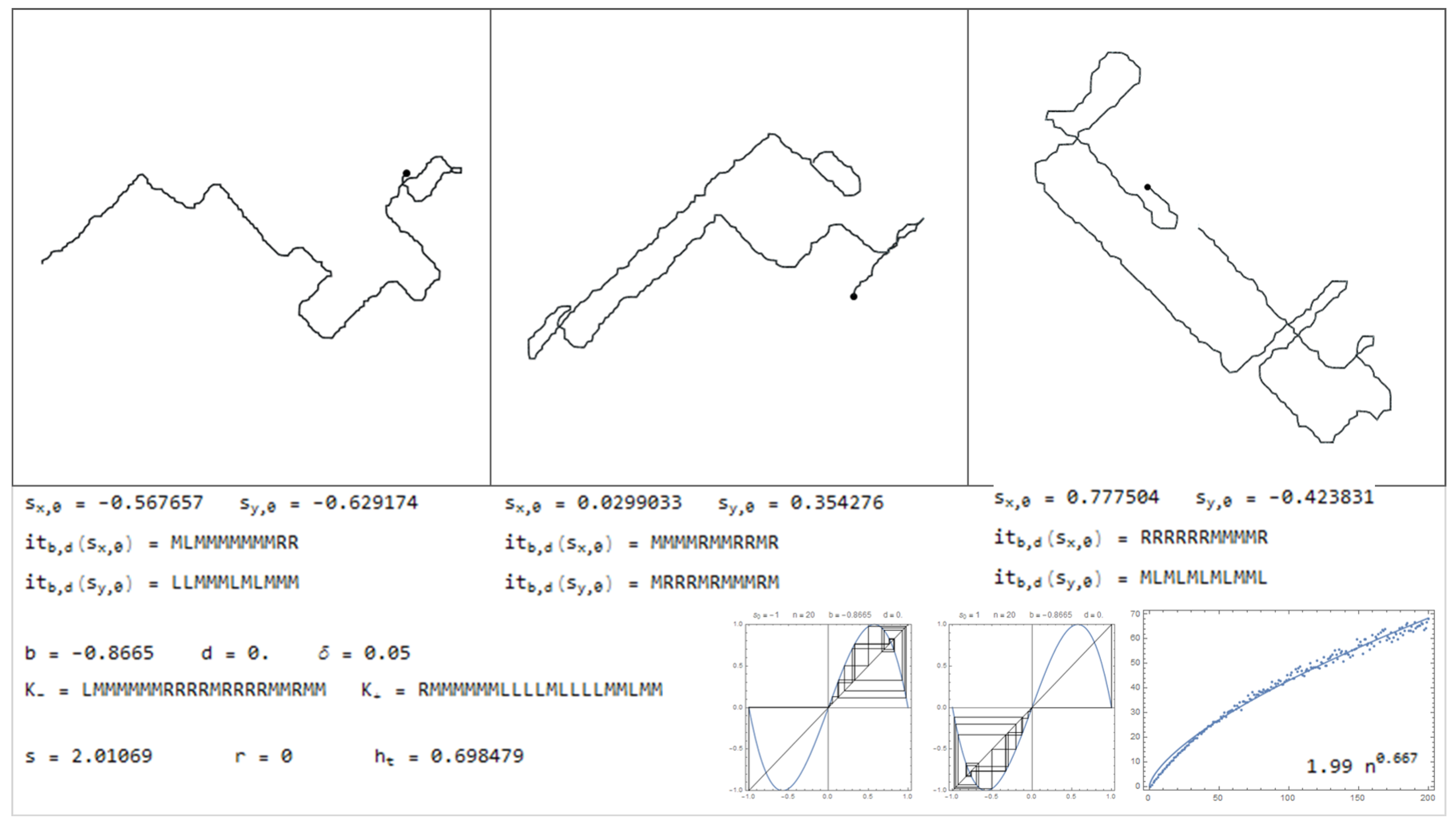
5.3. Pure and Mixed Bimodal Trajectories
5.4. Scale, Uncertainty and Precision in the Trajectory Determinacy
6. Dictionary
7. Conclusions, Discussion and Future Work
Funding
Acknowledgments
Conflicts of Interest
References
- Smouse, P.E.; Focardi, S.; Moorcroft, P.R.; Kie, J.G.; Forester, J.D.; Morales, J.M. Stochastic modelling of animal movement. Philos. Trans. R. Soc. B 2010, 365, 2201–2211. [Google Scholar] [CrossRef] [PubMed]
- Nathan, R.; Getz, W.M.; Revilla, E.; Holyoak, M.; Kadmon, R.; Saltz, D.; Smouse, P.E. A movement ecology paradigm for unifying organismal movement research. Proc. Natl. Acad. Sci. USA 2008, 105, 19052–19059. [Google Scholar] [CrossRef] [PubMed]
- Tang, W.; Bennett, D.A. Agent-based modeling of animal movement: A review. Geogr. Compass 2010, 4, 682–700. [Google Scholar] [CrossRef]
- Jonsen, I.D.; Flemming, J.M.; Myers, R.A. Robust state–space modeling of animal movement data. Ecology 2005, 86, 2874–2880. [Google Scholar] [CrossRef]
- Patterson, T.A.; Thomas, L.; Wilcox, C.; Ovaskainen, O.; Matthiopoulos, J. State–space models of individual animal movement. Trends Ecol. Evol. 2008, 23, 87–94. [Google Scholar] [CrossRef] [PubMed]
- McClintock, B.T.; King, R.; Thomas, L.; Matthiopoulos, J.; McConnell, B.J.; Morales, J.M. A general discrete-time modeling framework for animal movement using multistate random walks. Ecol. Monogr. 2012, 82, 335–349. [Google Scholar] [CrossRef]
- Langrock, R.; King, R.; Matthiopoulos, J.; Thomas, L.; Fortin, D.; Morales, J.M. Flexible and practical modeling of animal telemetry data: Hidden Markov models and extensions. Ecology 2012, 93, 2336–2342. [Google Scholar] [CrossRef] [PubMed]
- Petrovskii, S.; Mashanova, A.; Jansen, V. Variation in individual walking behavior creates the impression of a Lévy flight. PNAS 2011, 108, 8704–8707. [Google Scholar] [CrossRef] [PubMed]
- Tilles, P.F.; Petrovskii, S.V.; Natti, P.L. A random walk description of individual animal movement accounting for periods of rest. R. Soc. Open Sci. 2016, 3, 160566. [Google Scholar] [CrossRef] [PubMed]
- Ramos, C. Animal movement: Symbolic dynamics and topological classification. MBE 2019, 16, 5464–5489. [Google Scholar] [CrossRef] [PubMed]
- Almeida, P.; Lampreia, J.P.; Ramos, J.S. Topological invariants for bimodal maps. In ECIT 1992; World Sci. Publishing: Batchuns, Austria, 1996; pp. 1–18. [Google Scholar]
- Lampreia, J.P.; Sousa Ramos, J. Symbolic dynamics of bimodal maps. Port. Math 1997, 54, 1–18. [Google Scholar]
- Lampreia, J.P.; Severino, R.; Sousa Ramos, J. Irreducible complexity of iterated symmetrical bimodal maps. Discret. Dyn. Nat. Soc. 2005, 1, 69–85. [Google Scholar] [CrossRef]
- Milnor, J.; Thurston, W. On Iterated Maps of the Interval. In Dynamical System; Alexander, J.C., Ed.; Procededings Univ. Maryland 1986–1987, Lect. Notes in Math. n.1342; Springer: Berlin, Germany, 1988. [Google Scholar]
- Lampreia, J.P.; Severino, R.; Ramos, J.S. Renormalizations for cubic maps. Ann. Math. Silesianae 1999, 13, 257–270. [Google Scholar]
- Sousa Ramos, J. Introduction to Nonlinear Dynamics of Electronic Systems: Tutorial, Nonlinear Dynamics; Springer: Berlin, Germany, 2006; Volume 44, pp. 3–14. [Google Scholar]
- Milnor, J.; Tresser, C. On entropy and monotonicity of real cubic maps. Comm. Math. Phys. 2000, 209, 123–178. [Google Scholar] [CrossRef]
- Martins, N.; Severino, R.; Sousa Ramos, J. Isentropic real cubic maps. Int. J. Bifurc. Chaos 2003, 13, 1701–1709. [Google Scholar] [CrossRef]



























© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Correia Ramos, C. Kinematics in Biology: Symbolic Dynamics Approach. Mathematics 2020, 8, 339. https://doi.org/10.3390/math8030339
Correia Ramos C. Kinematics in Biology: Symbolic Dynamics Approach. Mathematics. 2020; 8(3):339. https://doi.org/10.3390/math8030339
Chicago/Turabian StyleCorreia Ramos, Carlos. 2020. "Kinematics in Biology: Symbolic Dynamics Approach" Mathematics 8, no. 3: 339. https://doi.org/10.3390/math8030339
APA StyleCorreia Ramos, C. (2020). Kinematics in Biology: Symbolic Dynamics Approach. Mathematics, 8(3), 339. https://doi.org/10.3390/math8030339