5.1. Basics on Complex Dynamics
Let
be a rational function defined on the Riemann sphere. Let us recall that every holomorphic function from the Riemann sphere to itself is in fact a rational function
, where
P and
Q are complex polynomials (see [
36]). For older work on dynamics on the Riemann sphere, see, e.g., [
37].
The orbit of a point
is composed by the set of its images by
R, i.e.,
A point
is a fixed point if
. Note that the roots
of an equation
are fixed points of the associated operator of the iterative method. Fixed points that do not agree with a root of
are strange fixed points.
The asymptotical behavior of a fixed point is determined by the value of its multiplier . Then, is attracting, repelling or neutral if is lower, greater or equal to 1, respectively. In addition, it is superattracting when .
For an attracting fixed point
, its basin of attraction is defined as the set of its pre-images of any order:
The dynamical plane represents the basins of attraction of a method. By iterating a set of initial guesses, their convergence is analyzed and represented. The points
that satisfy
are called critical points of
R. When a critical point does not agree with a solution of
, it is a free critical point. A classical result [
21] establishes that there is at least one critical point associated with each immediate invariant Fatou component.
5.3. Dynamics on Quadratic Polynomials
The application of the rational functions on a generic quadratic polynomial
,
is studied below. Let
be the rational operator associated with method
on
. When the Möbius transformation
is applied to
, we obtain
The rational operator associated with
on
does not depend on
a and
b. Then, the dynamical analysis of the method on all quadratic polynomials can be studied through the analysis of (
32). In addition, the Möbius transformation
h maps its roots
a and
b to
and
, respectively.
The fixed point operator has nine fixed points: and , which are superattracting, and , , , , all of them being repelling. Computing , 5 critical points can be found. and the free critical points and .
Following the same procedure, when Möbius transformation is applied to methods
and
,
, on polynomial
, the respective fixed point operators turn into
where
and
denote polynomials of degree
k.
The fixed point operator has 19 fixed points: the two superattracting fixed points , the repelling fixed point and the repelling fixed points , which are the roots of a sixteenth-degree polynomial.
Regarding the critical points of , the roots of are critical points, and has the free critical points and the roots of a tenth-degree polynomial, .
The dynamical planes are a useful tool in order to analyze the stability of an iterative method. Taking each point of the plane as initial estimation to start the iterative process, they represent the convergence of the method depending on the initial guess. In this sense, the dynamical planes show the basins of attraction of the attracting points.
Figure 1 represents the dynamical planes of the methods
and
. The generation of the dynamical planes follows the guidelines established in [
38]. A mesh of
complex values has been set as initial guesses in the intervals
,
. The roots
and
are mapped with orange and blue colors, respectively. The regions where the colors are darker represent that more iterations are necessary to converge than with the lighter colors, with a maximum of 40 iterations of the methods and a stopping criteria of a difference between two consecutive iterations lower than
.
As
Figure 1 illustrates, there is convergence to the roots for every initial guess. Let us remark that, when the order of the method increases, the basin of attraction of
becomes more intricate.
Finally, for the fixed point operators associated with family , the solutions of for give the superattracting fixed points and the repelling point . In addition, has 28 repelling points. and have 38 repelling points, corresponding to the roots of polynomials of 28 and 38 degree, respectively, and the strange fixed points .
The number of critical points of the fixed point operators
are collected in
Table 7. In addition, the number of strange fixed points and free critical points are also included in the table for all of the methods.
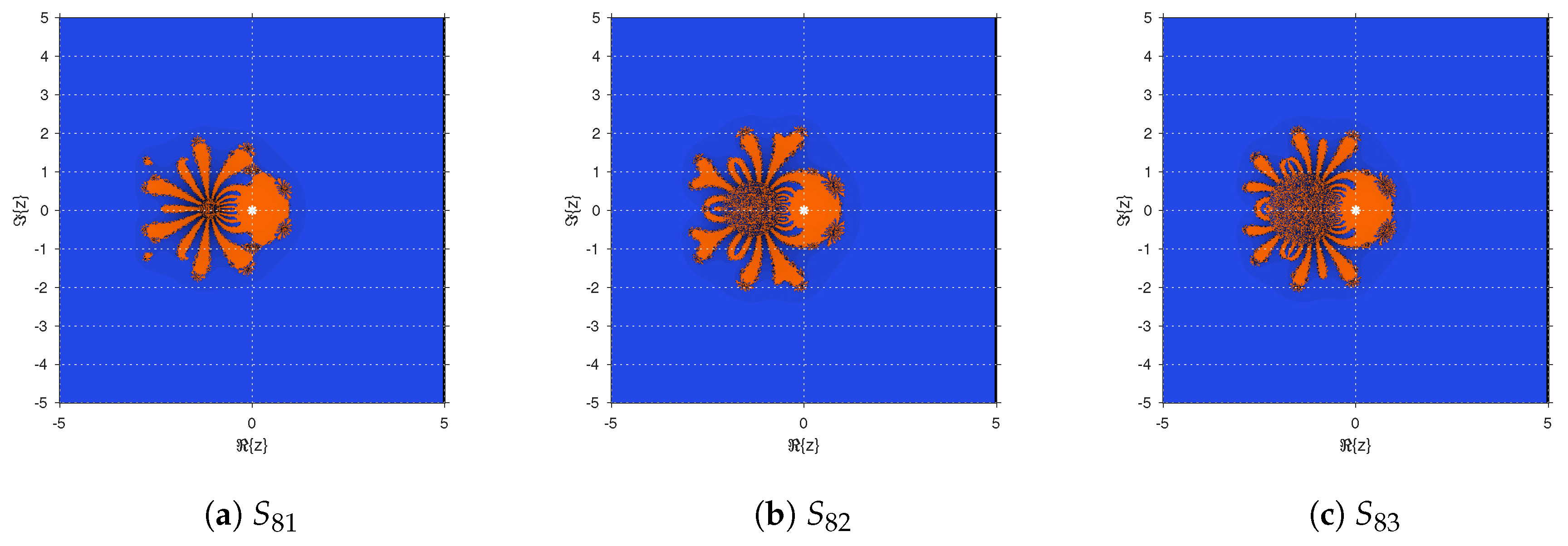
Figure 2 represents the dynamical planes of the methods
,
and
. Since the original methods satisfy the Scaling Theorem, the generation of one dynamical plane involves the study of every quadratic polynomial.
There is an intricate region around
in
Figure 2a, becoming wider in
Figure 2b,c around
. However, for every initial guess in the three dynamical planes of
Figure 2, there is convergence to the roots.
5.4. Dynamics on Cubic Polynomials
The stability of method
on cubic polynomials is analyzed below. As stated by the authors in [
39], the Scaling Theorem reduces the dynamical analysis on cubic polynomials to the study of dynamics on the cubic polynomials
,
,
and the family of polynomials
. Let us recall that the first one only has the root
, while
and
have three simple roots:
and
or
, respectively. For each
, the polynomial
also has three simple roots that depend on the value of
. They will be denoted by
.
By applying method
to polynomials
,
and
, the fixed point operators obtained are, respectively,
The only fixed point of
agrees with the root of the polynomial, so it is superattracting, and the operator does not have critical points.
The rest of the fixed point operators have six repelling fixed points, in addition to the roots of the corresponding polynomials: and for , and and for .
Regarding the critical points of and , they match with the roots of the polynomials. Moreover, there is the presence of free critical points with values for and for .
As for quadratic polynomials, the dynamical planes of method
when it is applied to the cubic polynomials have been represented in
Figure 3. Depending on the roots of each polynomial, the convergence to
is represented in orange, while the convergence to
and
is represented in blue and green, respectively. It can be see in
Figure 3 that there is full convergence to a root in the three cases. However, there are regions with darker colors that indicate a higher number of iterations until the convergence is achieved.
When method
is applied on
, the fixed point function turns into
The fixed points of
are the roots of the polynomial
, being superattracting, and the strange fixed points
that are the roots of the sixth-degree polynomial
.
As the asymptotical behavior of
depends on the value of
, the stability planes corresponding to these points are represented in
Figure 4. For each strange fixed point, a mesh of
points covers the values of
and
. The stability plane shows the values for the parameter where
is lower or greater than 1, represented in red or green, respectively.
From
Figure 4, the strange fixed points are always repelling for
. Then, the only attracting fixed points are the roots of the polynomial. This fact guarantees a better stability of the method.
The solutions of
are the critical points
and the free critical points
and
When the fixed point function has dependence on a parameter, another useful representation is the parameters’ plane. This plot is generated in a similar way to the dynamical planes, but, in this case, by iterating the method taking as an initial guess a free critical point and varying the value of
in a complex mesh of values, so each point in the plane represents a method of the family. The parameters’ plane helps to select the values for the parameter that give rise to the methods of the family with more stability.
The parameters’ planes of the four free critical points are shown in
Figure 5. Parameter
takes the values of
points in a complex mesh in the square
. Each point is represented in orange, green or blue when the corresponding method converges to an attracting fixed point. The iterative process ends when the maximum number of 40 iterations is reached, in which case the point is represented in black, or when the method converges as soon as, by the stopping criteria, a difference between two consecutive iterations lower than
is reached.
For the parameters’ planes in
Figure 5, there is not any black region. This guarantees that the corresponding iterative schemes converge to a root of
for all the values of
.
In order to visualize the basins of attraction of the fixed points, several values of
have been chosen to perform the dynamical planes of method
. These values have been selected from the different regions of convergence observed in the parameters planes.
Figure 6, following the same code of colours and stopping criteria as in the other representations, shows the dynamical planes obtained when these values of
are fixed.
As
Figure 6 shows, there is not any initial guess that tends to a point different than the roots. This fact guarantees the stability of these methods on the specific case of any cubic polynomial.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}