
Distributed Power Sharing Control Strategy for Interconnected AC and DC Microgrids Based on Event-Triggered Control Under Denial-of-Service Attack

Abstract
1. Introduction
2. The Structure of the Interconnected Microgrid and DoS Attack Model
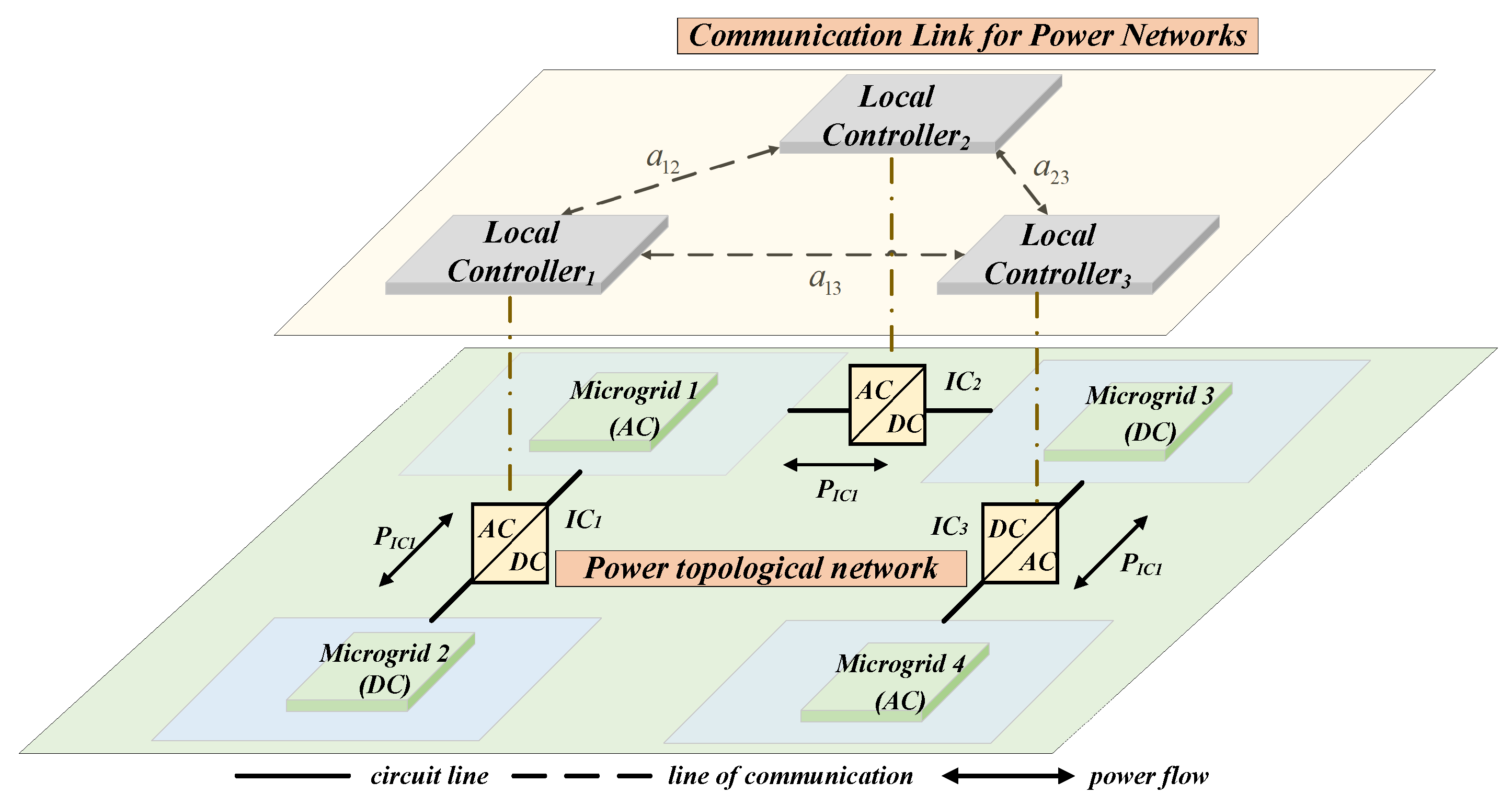
2.1. System Structure
2.2. DoS Attack Model
3. Power Sharing Control Strategy Based on Event-Triggered Control Under DoS Attack
3.1. Distributed Active Power Sharing Control Strategy
3.2. Distributed Power Sharing Control Strategy Based on Event-Triggered Communication
4. Simulation Result
4.1. The Performance of AC and DC Interconnected Microgrids Under DoS Attack
4.2. IC Realizes Proportional Sharing of Active Power Under DoS Attack
5. Experimental Result
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, B.; Chen, W.; Li, X.; Shu, L.; Ruan, X. A Power Adaptive Impedance Reshaping Strategy for Cascaded DC System With Buck-Type Constant Power Load. IEEE Trans. Power Electron. 2022, 37, 8909–8920. [Google Scholar] [CrossRef]
- Jin, H.; Chen, W.; Hou, K.; Shao, S.; Shu, L.; Li, R. A Sharing-Branch Modular Multilevel DC Transformer With Wide Voltage Range Regulation for DC Distribution Grids. IEEE Trans. Power Electron. 2022, 37, 5714–5730. [Google Scholar] [CrossRef]
- Murillo-Yarce, D.; Riffo, S.; Restrepo, C.; González-Castaño, C.; Garcés, A. Model Predictive Control for Stabilization of DC Microgrids in Island Mode Operation. Mathematics 2022, 10, 3384. [Google Scholar] [CrossRef]
- Villalón, A.; Muñoz, C.; Muñoz, J.; Rivera, M. Fixed-Switching-Frequency Modulated Model Predictive Control for Islanded AC Microgrid Applications. Mathematics 2023, 11, 672. [Google Scholar] [CrossRef]
- Fan, S.; Fu, Y.K.; Liu, Y.; Deng, C. Round-Robin-Based Cooperative Resilient Control for AC/DC MG Under FDI Attacks. IEEE Trans. Ind. Electron. 2025, 1–10. [Google Scholar] [CrossRef]
- Zhang, D.; Feng, G. A New Switched System Approach to Leader–Follower Consensus of Heterogeneous Linear Multiagent Systems With DoS Attack. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1258–1266. [Google Scholar] [CrossRef]
- Moussa, H.; Shahin, A.; Martin, J.P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Moubayed, N. Harmonic Power Sharing With Voltage Distortion Compensation of Droop Controlled Islanded Microgrids. IEEE Trans. Smart Grid 2018, 9, 5335–5347. [Google Scholar] [CrossRef]
- Sun, Q.; Han, R.; Zhang, H.; Zhou, J.; Guerrero, J.M. A Multiagent-Based Consensus Algorithm for Distributed Coordinated Control of Distributed Generators in the Energy Internet. IEEE Trans. Smart Grid 2015, 6, 3006–3019. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, X.; Guerrero, J.M. Secondary Restoration Control of Islanded Microgrids With a Decentralized Event-Triggered Strategy. IEEE Trans. Ind. Inform. 2018, 14, 3870–3880. [Google Scholar] [CrossRef]
- Lu, J.; Zhang, B.; Hou, X.; Guerrero, J.M. A Distributed Control Strategy for Unbalanced Voltage Compensation in Islanded AC Microgrids Without Continuous Communication. IEEE Trans. Ind. Electron. 2023, 70, 2628–2638. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Munir, M.S. A Flexible Harmonic Control Approach Through Voltage-Controlled DG–Grid Interfacing Converters. IEEE Trans. Ind. Electron. 2012, 59, 444–455. [Google Scholar] [CrossRef]
- Qu, J.; Jatskevich, J.; Zhang, C.; Zhang, S. Torque Ripple Reduction Method for Permanent Magnet Synchronous Machine Drives With Novel Harmonic Current Control. IEEE Trans. Energy Convers. 2021, 36, 2502–2513. [Google Scholar] [CrossRef]
- Zhang, K.; Su, M.; Liu, Z.; Han, H.; Zhang, X.; Wang, P. A Distributed Coordination Control for Islanded Hybrid AC/DC Microgrid. IEEE Syst. J. 2023, 17, 1819–1830. [Google Scholar] [CrossRef]
- Wang, J.; Dong, C.; Jin, C.; Lin, P.; Wang, P. Distributed Uniform Control for Parallel Bidirectional Interlinking Converters for Resilient Operation of Hybrid AC/DC Microgrid. IEEE Trans. Sustain. Energy 2022, 13, 3–13. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Z.; Wang, H.; Blaabjerg, F. Artificial Intelligence-Aided Thermal Model Considering Cross-Coupling Effects. IEEE Trans. Power Electron. 2020, 35, 9998–10002. [Google Scholar] [CrossRef]
- Deng, C.; Guo, F.; Wen, C.; Yue, D.; Wang, Y. Distributed resilient secondary control for DC microgrids against heterogeneous communication delays and DoS attacks. IEEE Trans. Ind. Electron. 2021, 69, 11560–11568. [Google Scholar] [CrossRef]
- Yao, W.; Wang, Y.; Xu, Y.; Deng, C. Cyber-Resilient Control of an Islanded Microgrid Under Latency Attacks and Random DoS Attacks. IEEE Trans. Ind. Inform. 2023, 19, 5858–5869. [Google Scholar] [CrossRef]
- Lian, Z.; Guo, F.; Wen, C.; Deng, C.; Lin, P. Distributed Resilient Optimal Current Sharing Control for an Islanded DC Microgrid Under DoS Attacks. IEEE Trans. Smart Grid 2021, 12, 4494–4505. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced Control Architectures for Intelligent Microgrids—Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Loh, P.C.; Li, D.; Chai, Y.K.; Blaabjerg, F. Autonomous Control of Interlinking Converter With Energy Storage in Hybrid AC–DC Microgrid. IEEE Trans. Ind. Appl. 2013, 49, 1374–1382. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, L.; Feng, G. Consensus of heterogeneous linear multiagent systems subject to aperiodic sampled-data and DoS attack. IEEE Trans. Cybern. 2018, 49, 1501–1511. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Wen, G.; Yu, X.; Huang, T. Distributed consensus tracking of networked agent systems under denial-of-service attacks. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6183–6196. [Google Scholar] [CrossRef]
- Zhao, N.; Shi, P.; Xing, W.; Agarwal, R.K. Resilient Event-Triggered Control for Networked Cascade Control Systems Under Denial-of-Service Attacks and Actuator Saturation. IEEE Syst. J. 2022, 16, 1114–1122. [Google Scholar] [CrossRef]
- Li, S.; Zou, W.; Guo, J.; Xiang, Z. Consensus of switched nonlinear multiagent systems subject to cyber attacks. IEEE Syst. J. 2021, 16, 4423–4432. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Zhai, M.; Sun, Q.; Wang, R.; Wang, B.; Liu, S.; Zhang, H. Fully Distributed Fault-Tolerant Event-Triggered Control of Microgrids Under Directed Graphs. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3570–3579. [Google Scholar] [CrossRef]
- Wang, R.; Li, W.; Sun, Q.; Li, Y.; Gui, Y.; Wang, P. Fully Distributed Dynamic Edge-Event-Triggered Current Sharing Control Strategy for Multibus DC Microgrids With Power Coupling. IEEE Trans. Ind. Inform. 2023, 19, 5667–5678. [Google Scholar] [CrossRef]
- Ma, D.; Liu, M.; Zhang, H.; Wang, R.; Xie, X. Accurate Power Sharing and Voltage Regulation for AC Microgrids: An Event-Triggered Coordinated Control Approach. IEEE Trans. Cybern. 2022, 52, 13001–13011. [Google Scholar] [CrossRef]
- Zhang, H.; Kim, S.; Sun, Q.; Zhou, J. Distributed Adaptive Virtual Impedance Control for Accurate Reactive Power Sharing Based on Consensus Control in Microgrids. IEEE Trans. Smart Grid 2017, 8, 1749–1761. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG Capacity | Output Filter | Harmonic Loads |
|---|---|---|
| P | / | |
| 20 kW | 1.85 mH/55 µF | 5 µF/2.5 |
| Unbalanced Loads | Rated Voltage and Frequency | Line Impedance |
| / | E/f | |
| 8 kW/10 kVAr | 120 V/60 Hz | 0.35 + 0.55 mH |
| AC-MG Droop Controller | AC-MG PR Controller | DC-MG PI Controller | IC PI Controller |
|---|---|---|---|
| m(Hz/W)/V(V/VAr) | |||
| / | 1/5 | 0.001/1.9 | 0.5/280 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Jia, Q.; Lyu, S.; Li, X.; Zhang, X.; Jiang, C. Distributed Power Sharing Control Strategy for Interconnected AC and DC Microgrids Based on Event-Triggered Control Under Denial-of-Service Attack. Mathematics 2025, 13, 1499. https://doi.org/10.3390/math13091499
Zhao Z, Jia Q, Lyu S, Li X, Zhang X, Jiang C. Distributed Power Sharing Control Strategy for Interconnected AC and DC Microgrids Based on Event-Triggered Control Under Denial-of-Service Attack. Mathematics. 2025; 13(9):1499. https://doi.org/10.3390/math13091499
Chicago/Turabian StyleZhao, Zhiheng, Qi Jia, Siyu Lyu, Xinwei Li, Xiaoheng Zhang, and Chuanyu Jiang. 2025. "Distributed Power Sharing Control Strategy for Interconnected AC and DC Microgrids Based on Event-Triggered Control Under Denial-of-Service Attack" Mathematics 13, no. 9: 1499. https://doi.org/10.3390/math13091499
APA StyleZhao, Z., Jia, Q., Lyu, S., Li, X., Zhang, X., & Jiang, C. (2025). Distributed Power Sharing Control Strategy for Interconnected AC and DC Microgrids Based on Event-Triggered Control Under Denial-of-Service Attack. Mathematics, 13(9), 1499. https://doi.org/10.3390/math13091499