

Adaptive Approximate Predefined-Time Guaranteed Performance Control of Uncertain Spacecraft
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Different from references [23,24,25], the proposed ANPTGPC provides the proof of the predefined-time stability with the Lyapunov method, and can ensure that the closed-loop system of the spacecraft attitude tracking is predefined-time stability instead of the so-called appointed-time or finite-time stability of the closed-loop system without the proof. Compared with reference [26], this paper develops an NPPF with predefined time convergence instead of exponential convergence.
- (2)
- A NPTSM surface is constructed with prescribed performance tracking errors, and a robust fault-tolerant ANPTGPC is proposed, which can ensure that the convergence time and transient performances can be easily defined by the user. In contrast to the above fixed time control schemes [7,8,9,10,11,12,13], the maximum upper bound of the settling time with the proposed ANPTGPC can be explicitly designed by the user instead of a complex calculation.
- (3)
- (4)
- The proposed ANPTGPC includes appealing features, such as the absence of a model, non-singularity, predefined-time stability, and guaranteed performance (i.e., prescribed transience, steady-state precision, and overshoot).
2. Preliminaries and Problem Statement
2.1. Preliminaries
2.2. Spacecraft Model and Properties
2.3. Problem Statement
3. Control Development
3.1. Nonlinear Prescribed Performance Function (NPPF)
3.2. Error Transformation
3.3. NPTSM Design
4. Uncertain Inertia Matrix Linear Parametrization
5. Controller Formulation
6. Illustrative Example
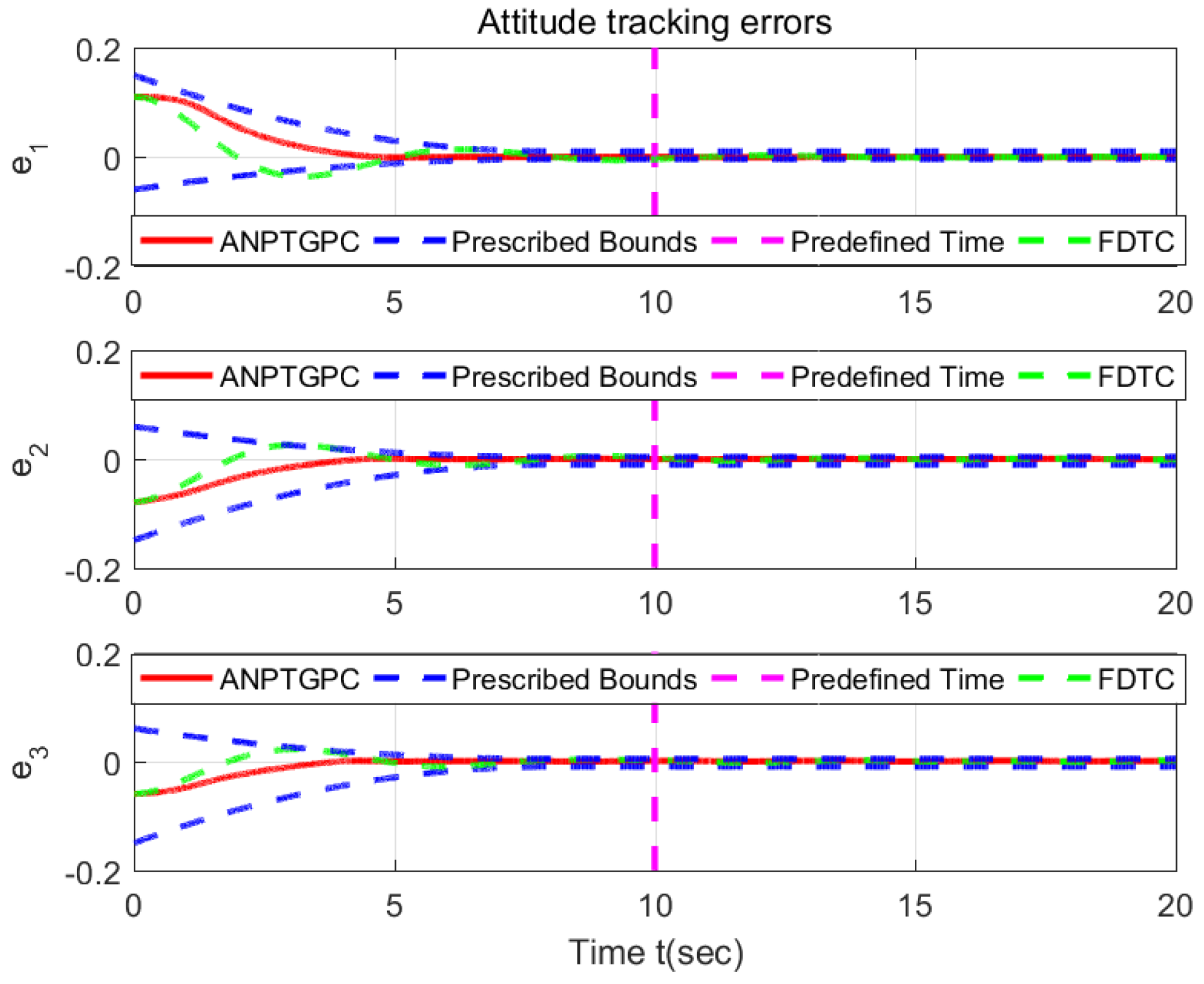
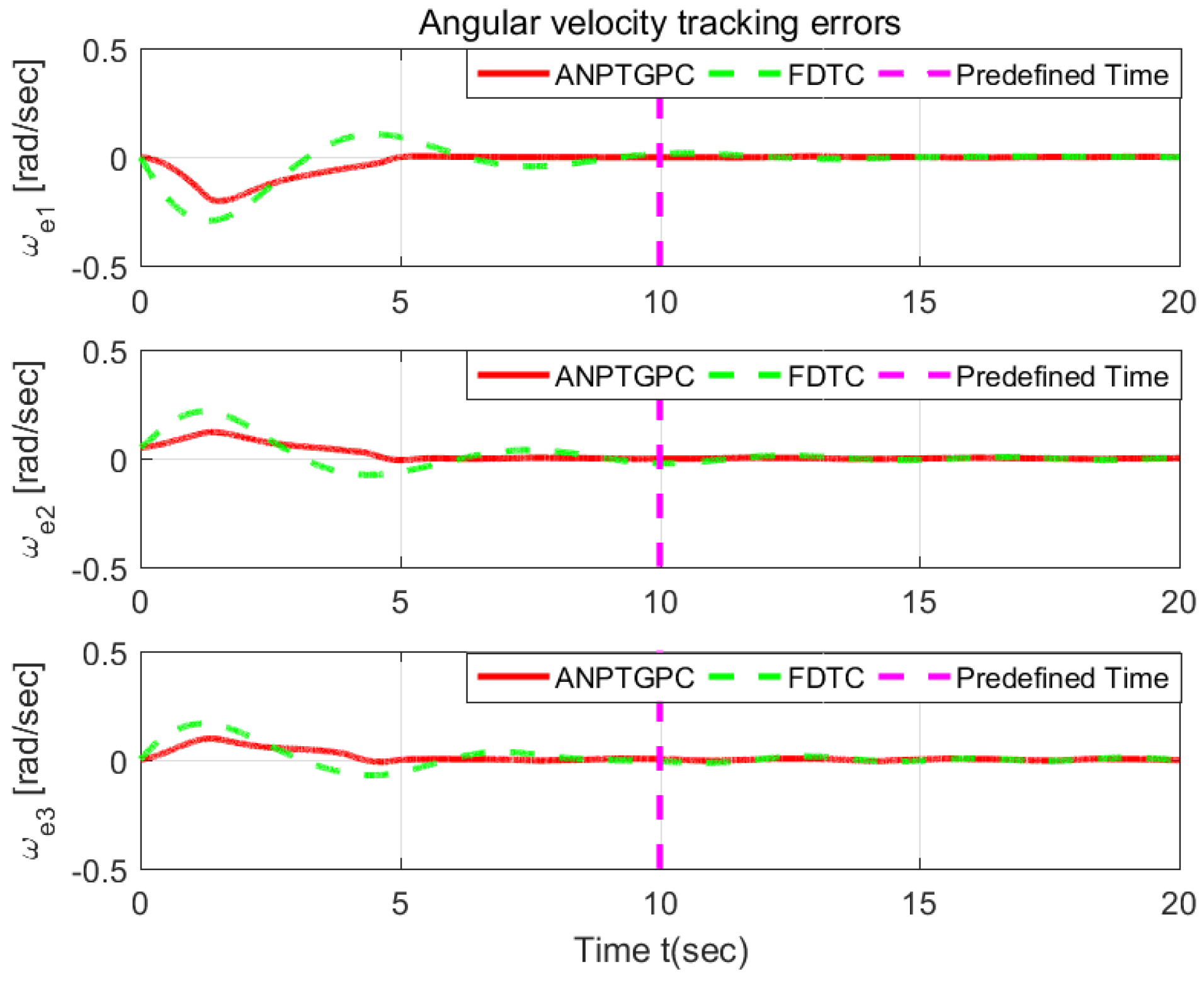
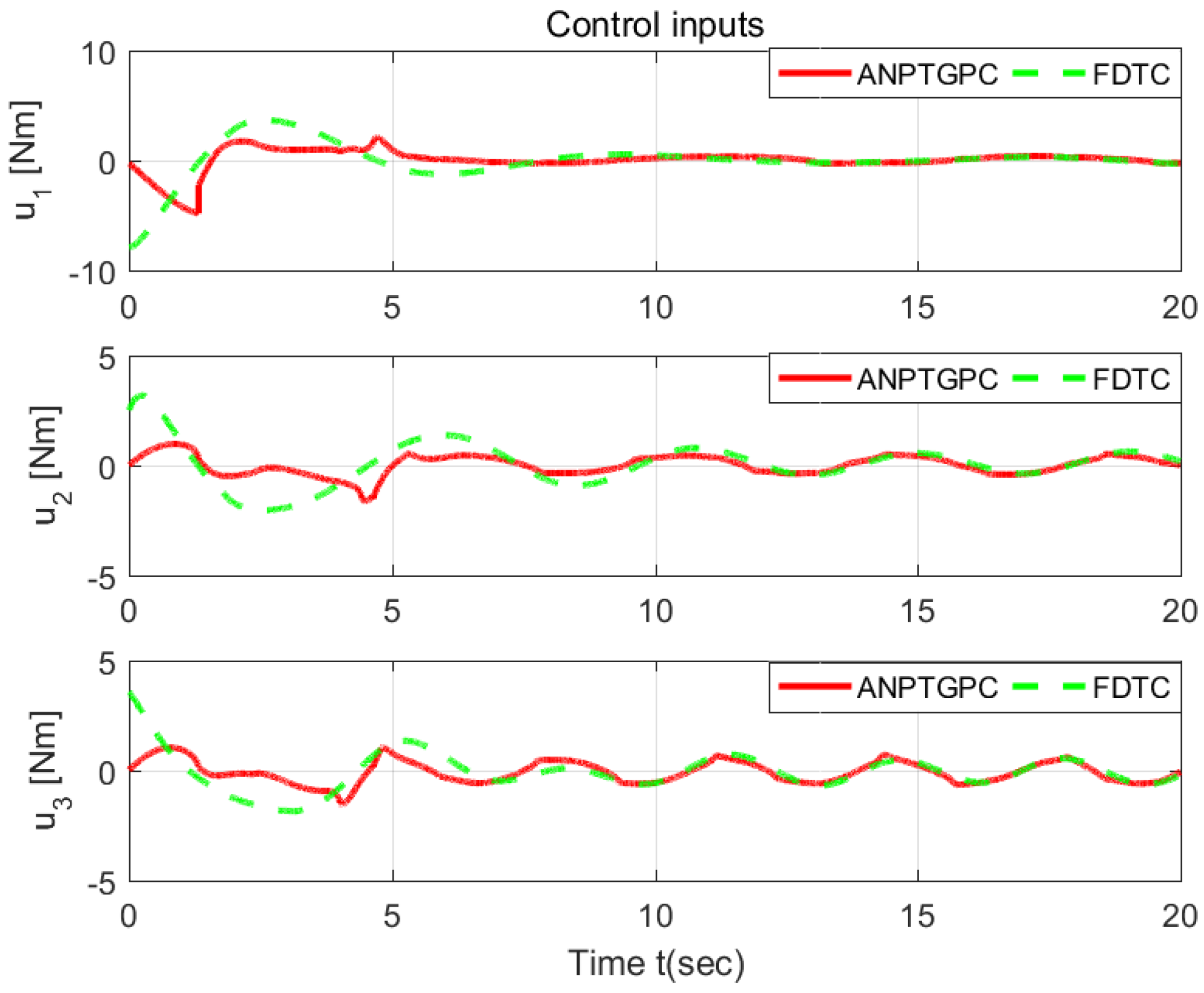
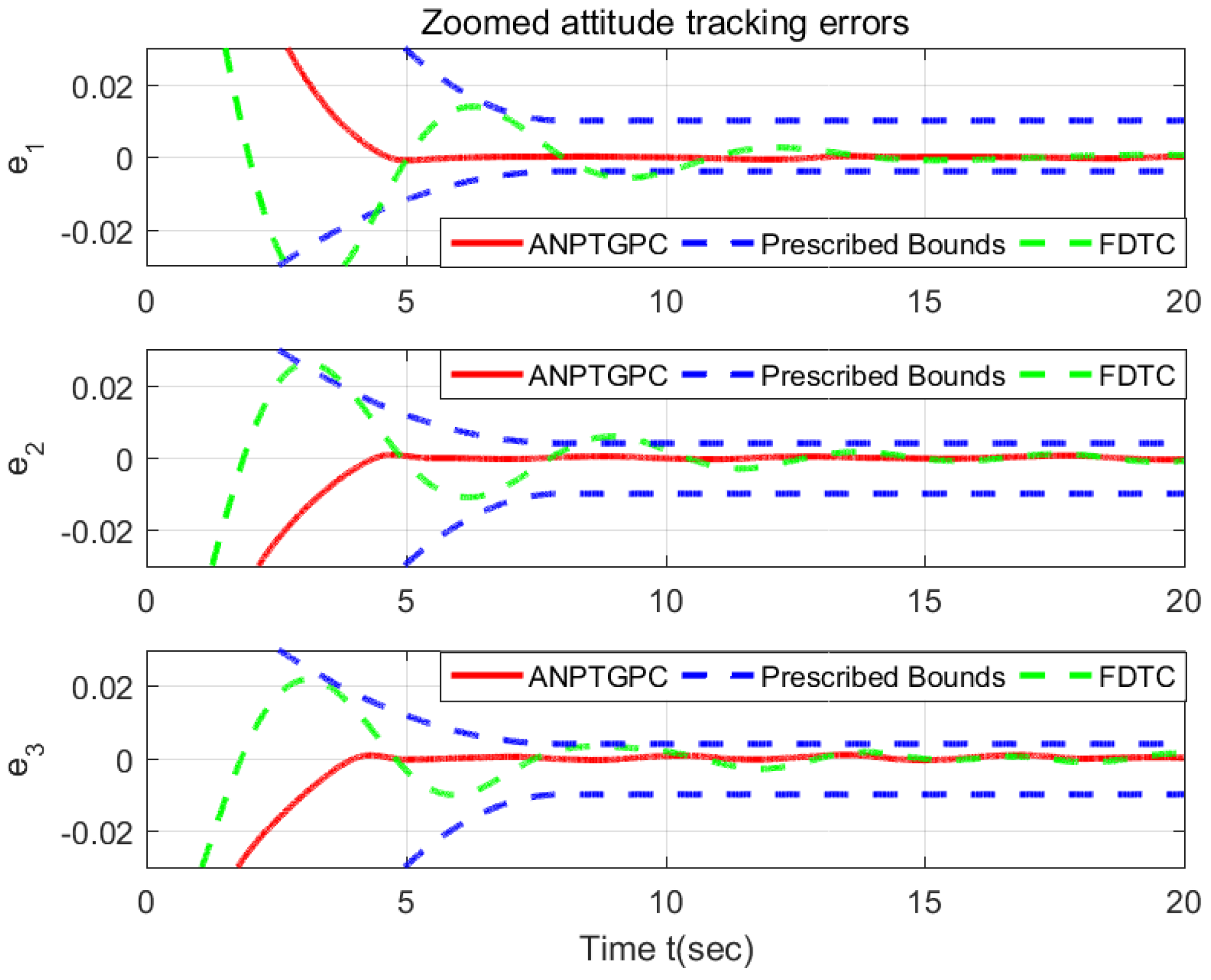
6.1. Validation the Proposed ANPTGPC
6.2. Comparison with the FDTC
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Proof of Proposition 1
- (i)
- For the case
- (ii)
- For the case
Appendix B. Proof of Theorem 1
Appendix C. Proof of Theorem 2
References
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optimiz. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Du, H.; Li, S.; Qian, C. Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Trans. Autom. Control 2011, 56, 2711–2717. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica 2013, 49, 3591–3599. [Google Scholar] [CrossRef]
- Zou, A. Finite-time output feedback attitude tracking control for rigid spacecraft. IEEE Trans. Control Syst. Technol. 2014, 22, 338–345. [Google Scholar] [CrossRef]
- Wang, Z.; Su, Y.; Zhang, L. A new nonsingular terminal sliding mode control for rigid spacecraft attitude tracking. J. Dyn. Sys. Meas. Control 2018, 140, 051006. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Jiang, B.; Hu, Q.; Friswell, M.I. Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Control Syst. Technol. 2016, 24, 1892–1898. [Google Scholar] [CrossRef]
- Esmailzadeh, S.M.; Golestani, M. Comment on fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Control Syst. Technol. 2018, 27, 1846. [Google Scholar] [CrossRef]
- Chen, Q.; Xie, S.; Sun, M.; Xie, S.; He, S. Adaptive nonsingular fixed-time attitude stabilization of uncertain spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2937–2950. [Google Scholar] [CrossRef]
- Gao, J.; Fu, J.; Zhang, S. Adaptive fixed-time attitude tracking control for rigid spacecraft with actuator faults. IEEE Trans. Ind. Electron. 2019, 66, 7141–7149. [Google Scholar] [CrossRef]
- Wang, Z.; Su, Y.; Zhang, L. Fixed-time fault-tolerant attitude tracking control for rigid spacecraft. J. Dyn. Sys. Meas. Control 2020, 142, 024502. [Google Scholar] [CrossRef]
- Sun, H.; Hou, L.; Zong, G.; Yu, X. Fixed-time attitude tracking control for spacecraft with input quantization. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 124–134. [Google Scholar] [CrossRef]
- Wang, Z.; Su, Y.; Zhang, L. Fixed-time attitude tracking control for rigid spacecraft. IET Control Theory Appl. 2020, 14, 790–799. [Google Scholar] [CrossRef]
- Sanchez-Torres, J.; Sanchez Edgar, N.; Loukianov Alexander, G. Predefined-time stability of dynamical systems with sliding modes. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 5842–5846. [Google Scholar]
- Jimenez-Rodriguez, E.; Munoz-Vazquez, A.; Sanchez-Torres, J.; Defoort, M.; Loukianov Alexander, G. A Lyapunov-like characterization of predefined-time stability. IEEE Trans. Autom. Control 2020, 65, 4922–4927. [Google Scholar] [CrossRef]
- Wang, F.; Miao, Y.; Li, S.C.; Hwang, I. Attitude control of rigid spacecraft with predefined-time stability. J. Frankl. Inst. 2020, 4212–4221. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Q. Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts. IEEE Trans. Circuits Syst. II-Express Briefs 2022, 69, 189–193. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Q.; He, X. Predefined-time approximation-free attitude constraint control of rigid spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 347–358. [Google Scholar] [CrossRef]
- Ye, D.; Zou, A.; Sun, Z. Predefined-time predefined-bounded attitude tracking control for rigid spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 464–472. [Google Scholar] [CrossRef]
- Wang, W.; Hou, M.; Fu, Y.; Liu, B. Continuous precise predefined-time attitude tracking control for a rigid spacecraft. Int. J. Control 2023, 96, 922–934. [Google Scholar] [CrossRef]
- Bechlioulis, C.; Rovithakis, G. Prescribed performance adaptive control for multi-input multi-output affine in the control nonlinear systems. IEEE Trans. Autom. Control 2010, 55, 1220–1226. [Google Scholar] [CrossRef]
- Bechliouliss, C.; Rovithakis, G. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Yin, Z.; Suleman, A.; Luo, J.; Wei, C. Appointed-time prescribed performance attitude tracking control via double performance functions. Aerosp. Sci. Technol. 2019, 93, 105337. [Google Scholar] [CrossRef]
- Liu, M.; Shao, X.; Ma, G. Appointed-time fault-tolerant attitude tracking control of spacecraft with double-level guaranteed performance bounds. Aerosp. Sci. Technol 2019, 92, 337–346. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G. Finite-Time Prescribed Performance Control for Spacecraft Attitude Tracking. IEEE/ASME Trans. Mechatron. 2022, 27, 3087–3098. [Google Scholar] [CrossRef]
- Wang, Z.; Ma, J.; Wang, C. Predefined-time guaranteed performance attitude tracking control for uncertain rigid spacecraft. IET Control Theory Appl. 2022, 16, 1807–1819. [Google Scholar] [CrossRef]
- Hasan, M.; Haris, M.; Qin, S. Fault-tolerant spacecraft attitude control: A critical assessment. Prog. Aerosp. Sci. 2022, 130, 100806. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. SDistributed Robust finite-time nonlinear consensus protocols for multi-gent systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Sanyal, A.; Fosbury, A.; Chaturvedi, N.; Bernstein, D. Inertia-free spacecraft attitude tracking with disturbance rejection and almost global stabilization. AIAA J. Guid. Control Dyna 2009, 32, 1167–1178. [Google Scholar] [CrossRef]
- Wong, H.; de Queiroz, M.S.; Kapila, V. Adaptive tracking control using Synthesized velocity from attitude measurements. Automatica 2001, 37, 947–953. [Google Scholar] [CrossRef]
- Cai, W.; Liao, X.; Song, Y. Indirect robust adaptive fault-tolerant control for attitude tracking of spacecraft. AIAA J. Guid. Control Dyna 2008, 31, 1456–1463. [Google Scholar] [CrossRef]
- Bustan, D.; Sani, S.; Pariz, N. Adaptive fault-tolerant spacecraft attitude control design with transient response control. IEEE/ASME Trans. Mechatron. 2013, 19, 1404–1411. [Google Scholar]
- Tsiotras, P. Further passivity results for the attitude control problem. IEEE Trans. Autom. Control 1998, 43, 1597–1600. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Khalil, H. Nonlinear Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, L.; Wang, Z.; Chen, C.; Yue, H. Adaptive Approximate Predefined-Time Guaranteed Performance Control of Uncertain Spacecraft. Mathematics 2025, 13, 832. https://doi.org/10.3390/math13050832
Hu L, Wang Z, Chen C, Yue H. Adaptive Approximate Predefined-Time Guaranteed Performance Control of Uncertain Spacecraft. Mathematics. 2025; 13(5):832. https://doi.org/10.3390/math13050832
Chicago/Turabian StyleHu, Liangmou, Zeng Wang, Changrui Chen, and Heng Yue. 2025. "Adaptive Approximate Predefined-Time Guaranteed Performance Control of Uncertain Spacecraft" Mathematics 13, no. 5: 832. https://doi.org/10.3390/math13050832
APA StyleHu, L., Wang, Z., Chen, C., & Yue, H. (2025). Adaptive Approximate Predefined-Time Guaranteed Performance Control of Uncertain Spacecraft. Mathematics, 13(5), 832. https://doi.org/10.3390/math13050832