



Norm-Based Adaptive Control with a Novel Practical Predefined-Time Sliding Mode for Chaotic System Synchronization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A new condition for the predefined-time stability of the Lyapunov function under disturbances is introduced, demonstrating that it ensures predefined-time convergence;
- A global robust sliding mode surface incorporating fast predefined-time control is proposed, which enhances the system’s robustness against external disturbances and unmodeled errors, ensuring rapid synchronization in uncertain environments;
- Unlike previous methods, which only guarantee synchronization within a small neighborhood of the sliding surface, this paper introduces a norm-based adaptive rate expression that enables the chaotic system to achieve zero synchronization error within a predefined time;
- The proposed method is applied to multiple chaotic systems, and the results indicate that the designed controller demonstrates superior performance.
2. Problem Description and Preliminary Explanation
2.1. Problem Description
2.2. Predefined-Time Stability
3. A Fast Predefined-Time Adaptive Sliding Mode Control Scheme
3.1. Lyapunov Function Design for Fast Predefined-Time Control
3.2. Fast Predefined-Time Sliding Mode Control
3.2.1. Fast Predefined-Time Sliding Surface
3.2.2. Controller Design
3.3. Adaptive Fast Predefined-Time Sliding Mode Control
4. Numerical Simulations
4.1. Theoretical System Experiments
- (i)
- Convergence Speed of the Control Scheme.
- (ii)
- Robustness Test.
- (iii)
- Adaptive Rate Test.
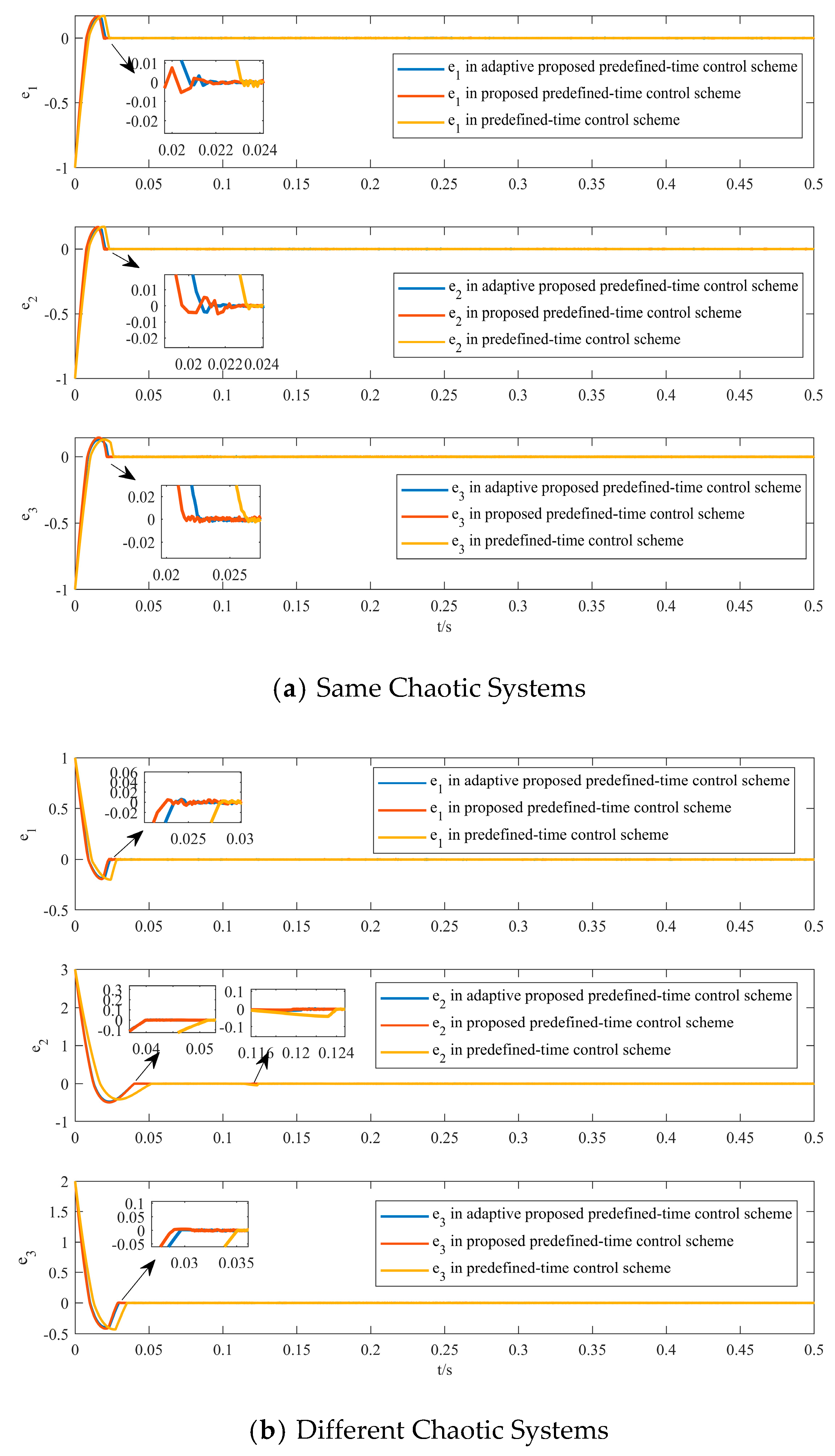
4.1.1. Comparison Experiment of Different Control Schemes
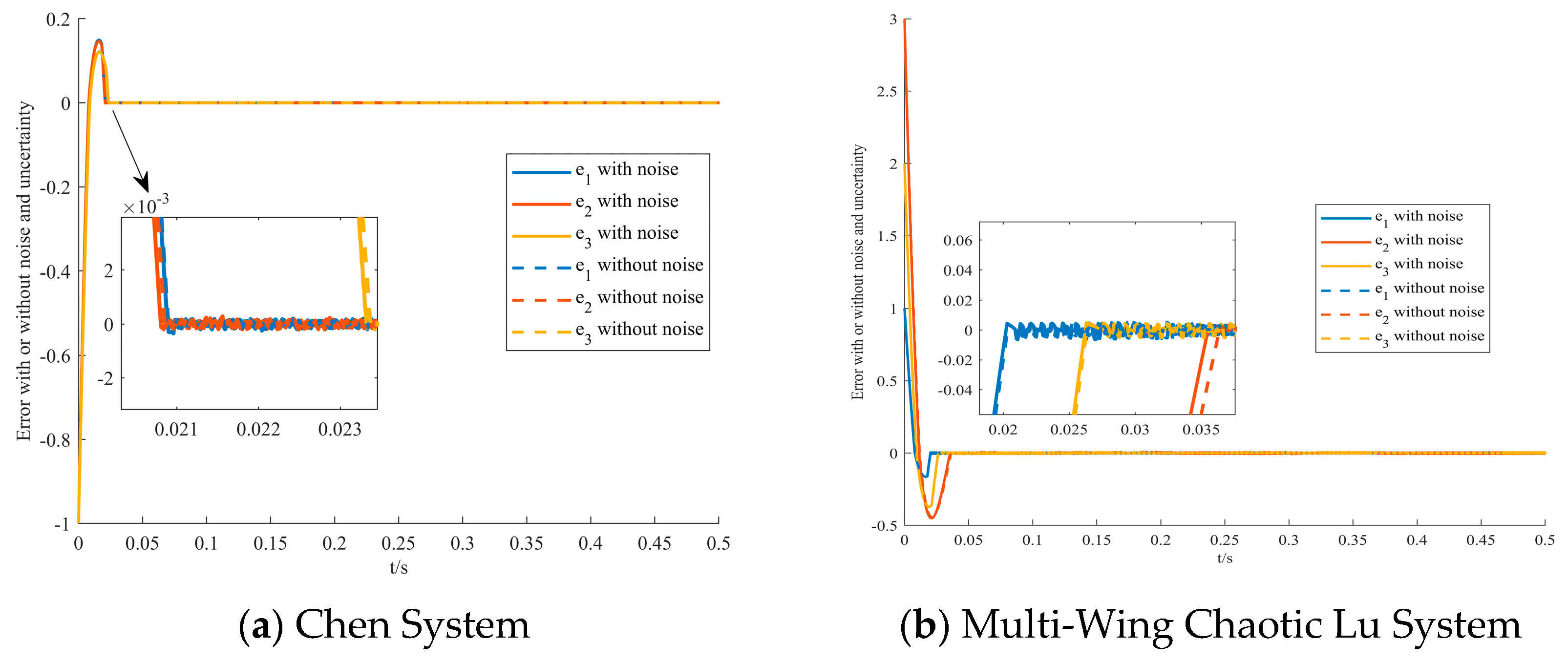
4.1.2. Robustness Analysis
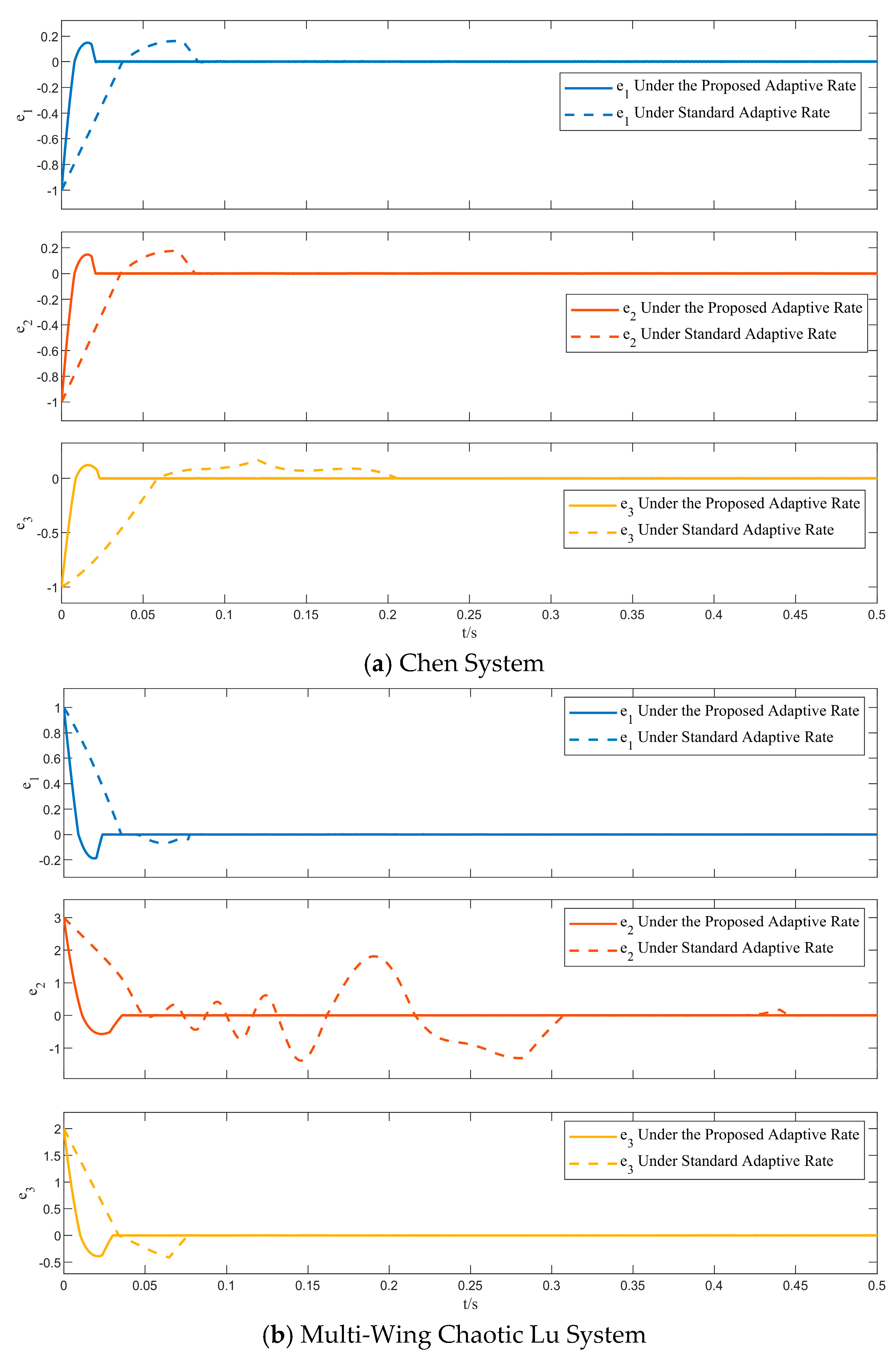
4.1.3. Comparison Experiment of Different Adaptive Rate Schemes
4.2. Actual Chaotic System Experiment (Memristor Experiment)
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. J. Nonlinear Sci. 1990, 64, 821. [Google Scholar] [CrossRef]
- Chen, Y.-J.; Chou, H.-G.; Wang, W.-J.; Tsai, S.-H.; Tanaka, K.; Wang, H.O.; Wang, K.C. A polynomial-fuzzy-model-based synchronization methodology for the multi-scroll Chen chaotic secure communication system. Eng. Appl. Artif. Intell. 2020, 87, 103251. [Google Scholar] [CrossRef]
- Hamidzadeh, S.M.; Rezaei, M.; Ranjbar-Bourani, M. Chaos synchronization for a class of uncertain chaotic supply chain and its control by ANFIS. Int. J. Prod. Manag. Eng. 2023, 11, 113–126. [Google Scholar] [CrossRef]
- Aliabadi, F.; Majidi, M.-H.; Khorashadizadeh, S. Chaos synchronization using adaptive quantum neural networks and its application in secure communication and cryptography. Neural Comput. Appl. 2022, 34, 6521–6533. [Google Scholar] [CrossRef]
- Lawnik, M.; Berezowski, M. New chaotic system: M-map and its application in chaos-based cryptography. Symmetry 2022, 14, 895. [Google Scholar] [CrossRef]
- Liu, Y. Circuit implementation and finite-time synchronization of the 4D Rabinovich hyperchaotic system. Nonlinear Dyn. 2012, 67, 89–96. [Google Scholar] [CrossRef]
- Tian, K.; Grebogi, C.; Ren, H.-P. Chaos generation with impulse control: Application to non-chaotic systems and circuit design. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3012–3022. [Google Scholar] [CrossRef]
- Gong, L.-H.; Luo, H.-X.; Wu, R.-Q.; Zhou, N.-R. New 4D chaotic system with hidden attractors and self-excited attractors and its application in image encryption based on RNG. Phys. A Stat. Mech. Its Appl. 2022, 591, 126793. [Google Scholar] [CrossRef]
- Spitz, O.; Herdt, A.; Wu, J.; Maisons, G.; Carras, M.; Wong, C.-W.; Elsäßer, W.; Grillot, F. Private communication with quantum cascade laser photonic chaos. Nat. Commun. 2021, 12, 3327. [Google Scholar] [CrossRef]
- Xiao, Y.; Xu, W.; Li, X.; Tang, S. Adaptive complete synchronization of chaotic dynamical network with unknown and mismatched parameters. Chaos Interdiscip. J. Nonlinear Sci. 2007, 17, 033118. [Google Scholar] [CrossRef]
- Guan, S.; Lai, C.-H.; Wei, G.-W. Phase synchronization between two essentially different chaotic systems. Phys. Rev. E 2005, 72, 016205. [Google Scholar] [CrossRef] [PubMed]
- Femat, R.; Solís-Perales, G. Synchronization of chaotic systems with different order. Phys. Rev. E 2002, 65, 036226. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Zhao, S.; Li, H.; Lu, R.; Wu, C. Adaptive neural network tracking control for robotic manipulators with dead zone. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 3611–3620. [Google Scholar] [CrossRef] [PubMed]
- Pal, P.; Jin, G.G.; Bhakta, S.; Mukherjee, V. Adaptive chaos synchronization of an attitude control of satellite: A backstepping based sliding mode approach. Heliyon 2022, 8, e11730. [Google Scholar] [CrossRef]
- Xu, Y.; Yu, J.; Li, W.; Feng, J. Global asymptotic stability of fractional-order competitive neural networks with multiple time-varying-delay links. Appl. Math. Comput. 2021, 389, 125498. [Google Scholar] [CrossRef]
- Deepika, D. Hyperbolic uncertainty estimator based fractional order sliding mode control framework for uncertain fractional order chaos stabilization and synchronization. ISA Trans. 2022, 123, 76–86. [Google Scholar] [CrossRef] [PubMed]
- Anguiano-Gijón, C.A.; Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Romero-Galván, G.; Martínez-Reyes, F. On predefined-time synchronisation of chaotic systems. Chaos Solitons Fractals 2019, 122, 172–178. [Google Scholar] [CrossRef]
- Song, J.; Niu, Y.; Zou, Y. Finite-time stabilization via sliding mode control. IEEE Trans. Autom. Control 2016, 62, 1478–1483. [Google Scholar] [CrossRef]
- Wang, L.; Dong, T.; Ge, M.-F. Finite-time synchronization of memristor chaotic systems and its application in image encryption. Appl. Math. Comput. 2019, 347, 293–305. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X. Fractional order fixed-time nonsingular terminal sliding mode synchronization and control of fractional order chaotic systems. Nonlinear Dyn. 2017, 89, 2065–2083. [Google Scholar] [CrossRef]
- Shirkavand, M.; Pourgholi, M. Robust fixed-time synchronization of fractional order chaotic using free chattering nonsingular adaptive fractional sliding mode controller design. Chaos Solitons Fractals 2018, 113, 135–147. [Google Scholar] [CrossRef]
- Jiménez-Rodríguez, E.; Sánchez-Torres, J.D.; Loukianov, A.G. On optimal predefined-time stabilization. Int. J. Robust Nonlinear Control 2017, 27, 3620–3642. [Google Scholar] [CrossRef]
- Assali, E.A. Predefined-time synchronization of chaotic systems with different dimensions and applications. Chaos Solitons Fractals 2021, 147, 110988. [Google Scholar] [CrossRef]
- Li, Q.; Yue, C. Predefined-time polynomial-function-based synchronization of chaotic systems via a novel sliding mode control. IEEE Access 2020, 8, 162149–162162. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Q. Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 189–193. [Google Scholar] [CrossRef]
- Vaidyanathan, S. Adaptive control of a chemical chaotic reactor. Int. J. PharmTech Res. 2015, 8, 377–382. [Google Scholar]
- Vaseghi, B.; Pourmina, M.A.; Mobayen, S. Secure communication in wireless sensor networks based on chaos synchronization using adaptive sliding mode control. Nonlinear Dyn. 2017, 89, 1689–1704. [Google Scholar] [CrossRef]
- Khan, A.; Kumar, S. Measuring chaos and synchronization of chaotic satellite systems using sliding mode control. Optim. Control Appl. Methods 2018, 39, 1597–1609. [Google Scholar] [CrossRef]
- Fei, J.; Feng, Z. Fractional-order finite-time super-twisting sliding mode control of micro gyroscope based on double-loop fuzzy neural network. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7692–7706. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X. An output-tracking-based discrete PID-sliding mode control for MIMO systems. IEEE/ASME Trans. Mechatron. 2013, 19, 1183–1194. [Google Scholar] [CrossRef]
- Modiri, A.; Mobayen, S. Adaptive terminal sliding mode control scheme for synchronization of fractional-order uncertain chaotic systems. ISA Trans. 2020, 105, 33–50. [Google Scholar] [CrossRef]
- Zhang, M.; Zang, H.; Bai, L. A new predefined-time sliding mode control scheme for synchronizing chaotic systems. Chaos Solitons Fractals 2022, 164, 112745. [Google Scholar] [CrossRef]
- Dadras, S.; Dadras, S.; Momeni, H. Linear matrix inequality based fractional integral sliding-mode control of uncertain fractional-order nonlinear systems. J. Dyn. Syst. Meas. Control 2017, 139, 111003. [Google Scholar] [CrossRef]
- Deepika, D.; Kaur, S.; Narayan, S. Uncertainty and disturbance estimator based robust synchronization for a class of uncertain fractional chaotic system via fractional order sliding mode control. Chaos Solitons Fractals 2018, 115, 196–203. [Google Scholar] [CrossRef]
- Saeed, N.A.; Saleh, H.A.; El-Ganaini, W.A.; Kamel, M.; Mohamed, M.S. On a New Three-Dimensional Chaotic System with Adaptive Control and Chaos Synchronization. Shock. Vib. 2023, 2023, 1969500. [Google Scholar] [CrossRef]
- Ahmad, I.; Shafiq, M. Robust adaptive anti-synchronization control of multiple uncertain chaotic systems of different orders. Automatika 2020, 61, 396–414. [Google Scholar] [CrossRef]
- Alimi, M.; Rhif, A.; Rebai, A.; Vaidyanathan, S.; Azar, A.T. Optimal adaptive backstepping control for chaos synchronization of nonlinear dynamical systems. In Backstepping Control of Nonlinear Dynamical Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 291–345. [Google Scholar]
- Kobiolka, J.; Habermann, J.; Yamakou, M.E. Reduced-order adaptive synchronization in a chaotic neural network with parameter mismatch: A dynamical system vs. machine learning approach. arXiv 2024, arXiv:2408.16155. [Google Scholar]
- Wang, S. A novel memristive chaotic system and its adaptive sliding mode synchronization. Chaos Solitons Fractals 2023, 172, 113533. [Google Scholar] [CrossRef]
- Roldán-Caballero, A.; Pérez-Cruz, J.H.; Hernández-Márquez, E.; García-Sánchez, J.R.; Ponce-Silva, M.; Rubio, J.d.J.; Villarreal-Cervantes, M.G.; Martínez-Martínez, J.; García-Trinidad, E.; Mendoza-Chegue, A. Synchronization of a new chaotic system using adaptive control: Design and experimental implementation. Complexity 2023, 2023, 2881192. [Google Scholar] [CrossRef]
- Keighobadi, J.; Hosseini-Pishrobat, M.; Faraji, J. Adaptive neural dynamic surface control of mechanical systems using integral terminal sliding mode. Neurocomputing 2020, 379, 141–151. [Google Scholar] [CrossRef]
- Fathollahi, A.; Andresen, B. Adaptive Fixed-Time Control strategy of Generator Excitation and Thyristor-Controlled Series Capacitor in Multi-Machine Energy Systems. IEEE Access 2024, 12, 100316–100327. [Google Scholar] [CrossRef]
- Tian, K.; Ren, H.-P.; Grebogi, C. Existence of chaos in the Chen system with linear time-delay feedback. Int. J. Bifurc. Chaos 2019, 29, 1950114. [Google Scholar] [CrossRef]
- Sahoo, S.; Roy, B.K. Design of multi-wing chaotic systems with higher largest Lyapunov exponent. Chaos Solitons Fractals 2022, 157, 111926. [Google Scholar] [CrossRef]
- Wang, Y.; Li, H.; Guan, Y.; Chen, M. Predefined-time chaos synchronization of memristor chaotic systems by using simplified control inputs. Chaos Solitons Fractals 2022, 161, 112282. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Qian, J.; Tian, D.; Zeng, Y. Norm-Based Adaptive Control with a Novel Practical Predefined-Time Sliding Mode for Chaotic System Synchronization. Mathematics 2025, 13, 748. https://doi.org/10.3390/math13050748
Ding H, Qian J, Tian D, Zeng Y. Norm-Based Adaptive Control with a Novel Practical Predefined-Time Sliding Mode for Chaotic System Synchronization. Mathematics. 2025; 13(5):748. https://doi.org/10.3390/math13050748
Chicago/Turabian StyleDing, Huan, Jing Qian, Danning Tian, and Yun Zeng. 2025. "Norm-Based Adaptive Control with a Novel Practical Predefined-Time Sliding Mode for Chaotic System Synchronization" Mathematics 13, no. 5: 748. https://doi.org/10.3390/math13050748
APA StyleDing, H., Qian, J., Tian, D., & Zeng, Y. (2025). Norm-Based Adaptive Control with a Novel Practical Predefined-Time Sliding Mode for Chaotic System Synchronization. Mathematics, 13(5), 748. https://doi.org/10.3390/math13050748