1. Introduction
With the rapid development of space science worldwide, a large number of spacecraft are sent into space to perform a variety of tasks [
1], such as formation flying [
2], environmental monitoring, deep space exploration, etc. A high-performance attitude control system (ACS) characterized by high precision, stability, and robustness is clearly essential for successfully completing the tasks described above [
3,
4]. In the past few decades, extensive studies of spacecraft ACS control methods have emerged, such as adaptive control [
5], backstepping control [
6], sliding mode control (SMC) [
7,
8], model predictive control (MPC) [
9], reinforcement learning (RL) [
10], etc.The above methods make it difficult to establish in advance the relationship between parameters and expected control performance, which is crucial for developing high-performance ACS for spacecraft operating with actuator faults [
11]. The backstepping method may face the problem of differential explosion. In addition, MPC and RL have high requirements for computing power, which are difficult to match the limited computing resources on the satellite. Further considering the limited communication resources of the spacecraft [
12], achieving a good balance between high performance and reducing the communication resource usage is a more challenging and interesting problem.
In order to establish an intuitive and clear relationship between controller design and performance such as overshoot, convergence time, accuracy, etc, prescribed performance control (PPC) has gradually gained attention [
13]. Moreover, PPC is not completely independent of the above existing control methods. It provides a framework that can be integrated into them for performance-constrained design. For the purpose of providing a desirable transient and steady performance, PPC has been implemented by using the prescribed performance function, whose shapes can be designed as needed to regulate the error. Ref. [
14] implemented PPC for combined spacecraft control, but the performance constraints were poor. Although [
15,
16,
17] improves finite time convergence, it lacks the ability to adapt to disturbances. Ref. [
18] avoids control singularity through mapping transformation, but its design is difficult and it is still a static function. Ref. [
19] designed a performance function adaptive correction method to accommodate small disturbances, but still cannot handle large-scale faults, which refer to actuator faults exceeding saturation level. In [
20], PPC has been improved to handle non-continuous control references. The tunnel prescribed performance function was designed in [
21], which can better constrain overshoot but does not have dynamic adjustment capabilities. However, PPC still has problems such as over-reliance on initial error prior information and an inability to adaptively adjust static performance envelopes [
18,
22]. Actuator faults exceeding saturation levels degrade tracking performance and cause input saturation, leading to increased tracking errors and control singularities. As errors breach the fixed performance envelope, control inputs accumulate, further saturating the actuators. Additionally, enhancing PPC to avoid repetitive envelope initialization and improve its generality is a key challenge. This paper addresses these issues by proposing the adhesive-resilient prescribed control (ARPC), which improves robustness and adaptability, particularly in the presence of actuator faults and varying initial conditions.
On the other hand, as spacecraft subsystems grow in number and integration, communication demands between modules rise, yet resources and energy remain constrained. Excessive data transmission risks congestion and safety hazards. Thus, minimizing the communication usage of the ACS to alleviate module congestion is of significant research value. All aforementioned control methods are developed based on the continuous time framework. In current digital computers, signals need to be transmitted continuously with a sufficiently small sampling period. In order to alleviate the increasingly serious communication congestion problem, the event trigger (ET) scheme has been widely studied [
23,
24]. An ET scheme with a relative threshold based on the control error was designed in [
25]. Another relative threshold ET scheme based on sliding mode error is given in [
26,
27]. ET control based on fixed thresholds [
28,
29] was developed, but it lacks the ability to adapt to different degrees of control error. Ref. [
30] designed a 1-bit based ET scheme, which tries to explore a balance between reducing transmission and performance, but the single updating strategy leads to less-than-ideal accuracy, and there is still room for improvement and expansion. Fixed thresholds lack adaptive capabilities, and relative thresholds are prone to signal distortion [
31]. ET and PPC are combined [
32,
33] to achieve event-triggered control of performance constraints. It is important to note that these combinations involve a trade-off, sacrificing certain performance aspects in order to reduce communication frequency, a limitation imposed by the adopted ET scheme. Moreover, prior research has predominantly concentrated on minimizing communication frequency, without addressing the design of more intricate multi-step thresholds or the optimization of the number of bits needed for each transmission.
To mitigate the performance degradation of ACS caused by actuator faults, active fault-tolerant control is an effective method to ensure stable operation under non-fatal faults [
34]. However, when implemented within active fault-tolerant control laws, PPC encounters challenges such as control singularity and limited adaptability to arbitrary initial conditions. Furthermore, existing event-triggered (ET) schemes often struggle to balance performance constraints with minimal communication usage. Motivated by these issues, this paper explores the development of dynamic adaptive PPC to address faults or disturbances exceeding saturation levels, and designs an adhesive initial performance envelope to avoid complex parameter adjustments. Additionally, we extend the recent results from the author’s team [
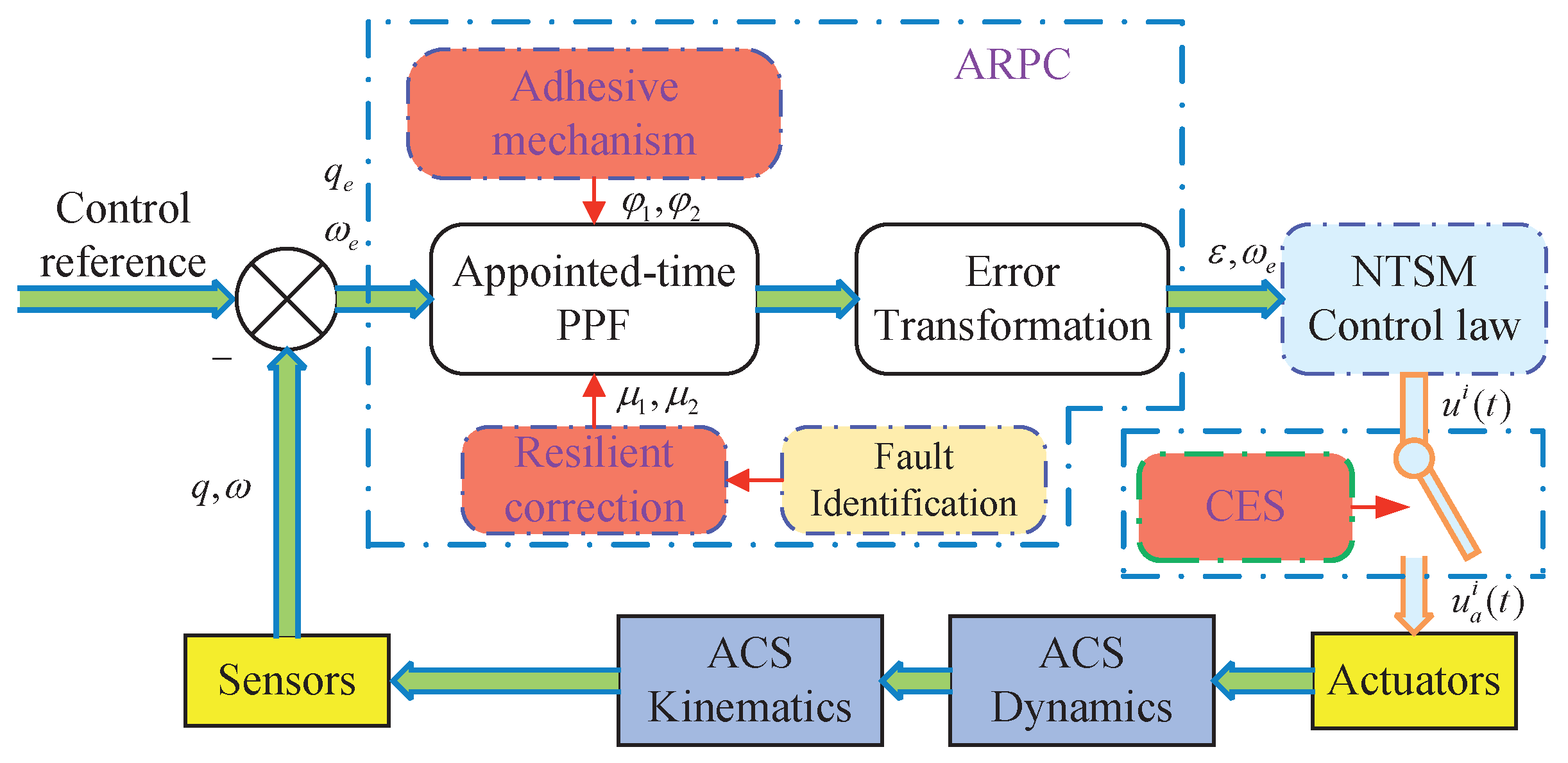
31] to address the integration of prescribed performance control singularity under actuator faults in spacecraft attitude control, effectively reducing communication congestion and minimizing transmission bits. The contributions of this paper can be summarized as follows:
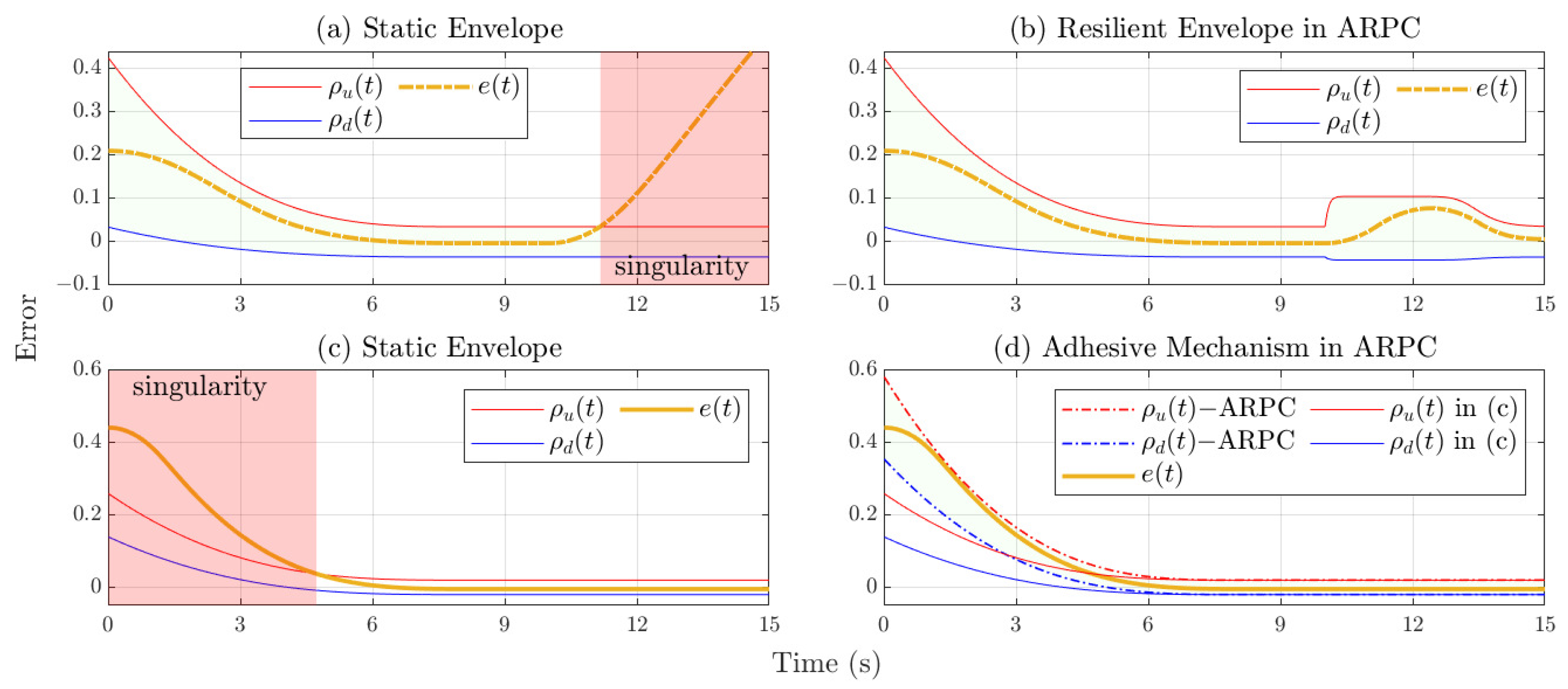
Adhesive-resilient prescribed control (ARPC) is proposed to effectively resolve prescribed control singularities. By sensing faults, saturation, and error trends, it adaptively applies resilient corrections. To prevent boundary breaches, resilient envelopes are proactively relaxed, with higher-performance envelopes reinstated when conditions allow. This method transforms traditional static PPC into a dynamic approach. Compared to [
14,
19], ARPC significantly reduces control singularity and conservatism, greatly enhancing robustness.
The proposed ARPC incorporates an adhesive mechanism that automatically adjusts the initial performance envelope to accommodate arbitrary initial errors. This flexibility allows ARPC to handle any initial conditions without compromising transient performance and reduces reliance on initial errors. Compared with [
18,
24], it prevents control singularities and simplifies initial parameter design, thereby greatly enhancing its general applicability.
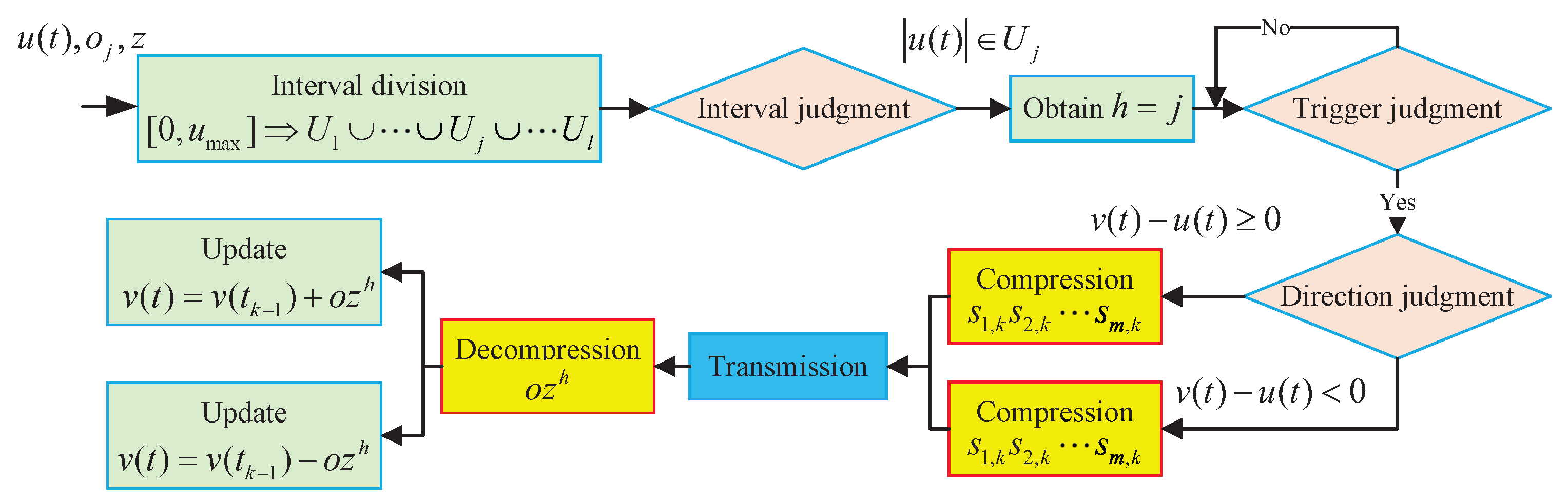
The CES dynamically updates control outputs by transmitting compressed
z-ary bits through a flexible triggering strategy. Compared to other ET schemes [
25,
28], it minimizes communication frequency between the control box and actuator, significantly reducing data transmission. This alleviates communication congestion, extends actuator lifespan, and balances resource conservation with high control performance.
This paper is organized as follows:
Section 2 presents the system models, preliminaries, and control objectives for spacecraft ACS.
Section 3 is dedicated to the main contributions of this work.
Section 4 demonstrates the effectiveness and superiority of the proposed scheme through numerical simulation comparison. Finally, the conclusion of this study is given in
Section 5.
2. Problem Statement and Preliminaries
Considering the singularity problem when using Euler angles to describe the large-scale agile maneuvering of the spacecraft, quaternions will be used here to describe it. The spacecraft attitude kinematic equation is expressed as follows [
35,
36]:
in which
are the scalar and vector parts of the quaternion
;
is a unit quaternion used to describe the attitude of the spacecraft body coordinate system
relative to the inertial coordinate system
, and satisfies
;
represents the attitude angular rate of the spacecraft in
relative to
; and
is the identity matrix.
is a tilde matrix operation expressed as follows:
The spacecraft attitude dynamics [
37] equation can be expressed as:
where
represents the spacecraft’s actual moment of inertia matrix,
and
are the nominal part and uncertainty, respectively [
38]. Similarly,
is the nominal actuator configuration matrix, and
is its uncertainty part.
indicates actuator additive fault;
is the disturbance torque on the spacecraft, mainly from gravity gradient, solar pressure, atmospheric drag and space magnetic field.
is the output torque of
n actuators, and
can be expressed as follows:
After appropriate transformation, (
3) can be expressed more specifically as follows:
where
represents equivalent faults including faults, uncertainties and disturbances, making it easier to design and implement fault-tolerant control laws; in addition,
.
To achieve attitude tracking control, it is necessary to further transform (
6) into the error dynamics equation. Define
as the desired attitude quaternion, then the error quaternion of
relative to target coordinate system
can be expressed as
, where ⊙ is the quaternion multiplication operation.
represents the angular velocity error of
relative to
, where
is the desired angular velocity,
denotes the corresponding rotation matrix between
and
. Then the ACS error dynamics is further given by
Assumption 1. The set of faults, uncertainties, and disturbances is bounded, i.e., [12]. This is because the nominal model accuracy is relatively high and the magnitude of spatial environmental disturbances is small. Actuator faults cannot be unbounded due to physical energy limitations. Assumption 2. The fault estimate can be obtained through an observer or filter, and the estimation error is bounded, satisfying . There is abundant research on fault estimation (reconstruction). Limited by space, this paper does not involve how to design fault estimation algorithms. For more details, please refer to previous research from the author’s team [39] or other results [40], etc. Assumption 3. The spacecraft attitude angle and attitude angular rate ω can be measured, the feedback control law can be designed based on and ω, and the desired angular velocities and are bounded [15]. To achieve fault tolerance, it is necessary to ensure that the attitude remains stable and controllable under fault conditions. To facilitate the description of the control objectives and problems, the issue can be roughly divided into two cases. One is that the fault is smaller than the output capacity of the actuator, that is, . Once the fault is accurately identified, it can be easily offset by the fault-tolerant control law. The other is that when the fault exceeds the output capacity of the actuator , the actuator is not sufficient to generate the torque to offset the fault, which inevitably causes the posture to deviate from the ideal trajectory. When Assumptions 1 and 3 do not hold, the proposed method will lose stability. When Assumption 2 does not hold, the compensation effect of active fault tolerance will be greatly reduced.
4. Simulation Results
In this section, simulation experiments are implemented to demonstrate and verify the effectiveness of the developed ARPC with CES for the spacecraft attitude fault-tolerant tracking problem. The problem involves additive actuator faults, parameter uncertainties, and unknown disturbances. The spacecraft is a rigid body equipped with star sensors, gyroscopes, and thrusters as sensors and actuators, respectively. The nominal part
and the uncertain part
of the moment of inertia matrix are selected as follows:
In order to verify the robustness of the ARPC to large-scale fault scenarios with limited low output capacity, redundant actuators are not included. The nominal configuration matrix of the actuators and its uncertainty are given by
The initial attitude is chosen randomly as
, or expressed in quaternion form as
. The initial angular rate is chosen as
. The thrusters as ACS actuators have limited output capacity, and the maximum output torque of thrusters is assumed to be
N·m. Additionally, the external disturbances are supposed as follows:
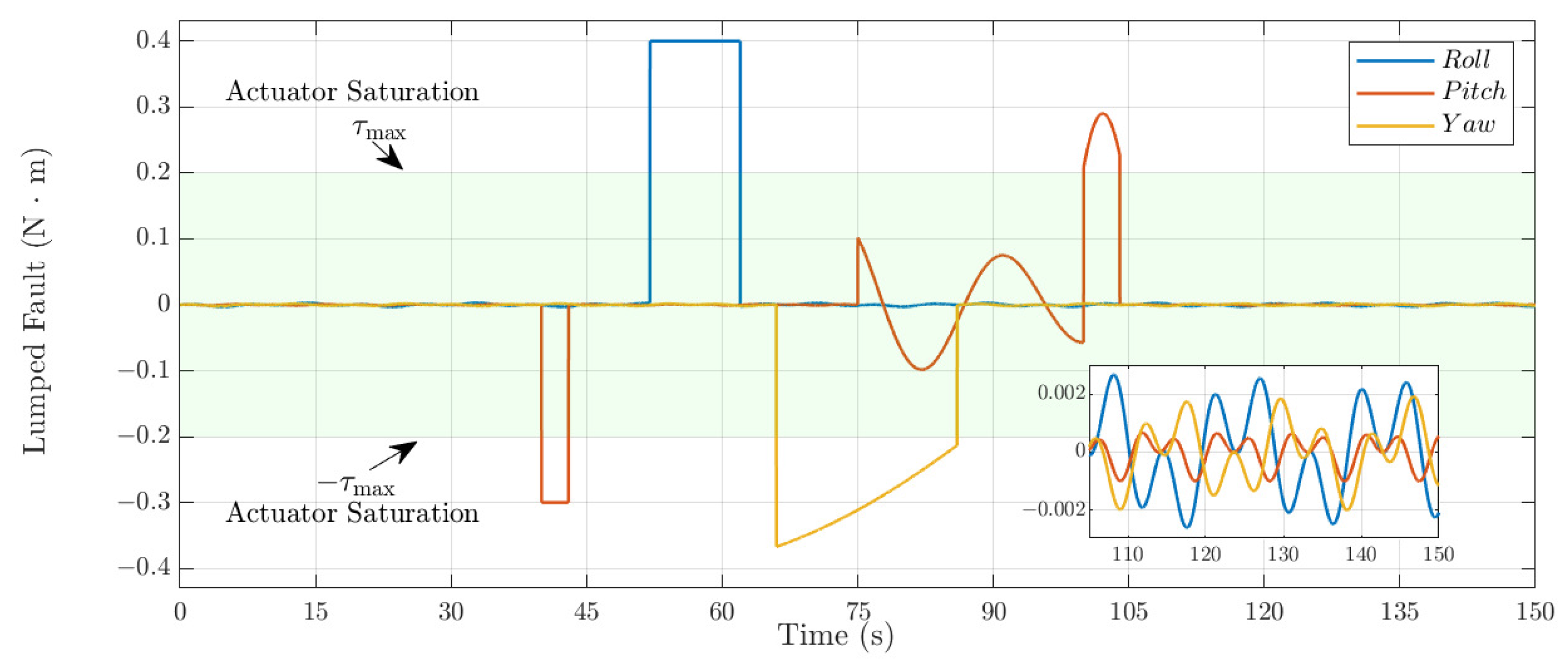
In order to verify the fault-tolerant performance of the controller, the actuator faults are given in
Table 2.
The lumped
is obtained by induction as in (
6), and the relationship between
and actuator saturation is intuitively shown in
Figure 5. The green coverage area in the figure represents the available output of the actuator, that is,
N·m. It is not difficult to see that the fault scenarios given in
Table 2 obviously exceed the
, in order to verify the resilience and fault tolerance of ARPPC to large-scale faults. The overall simulation time is set as 150 s with a time step of 0.01 s. The design parameters of the relevant control law based on ARPC and the parameter selection of CES are given in
Table 3.
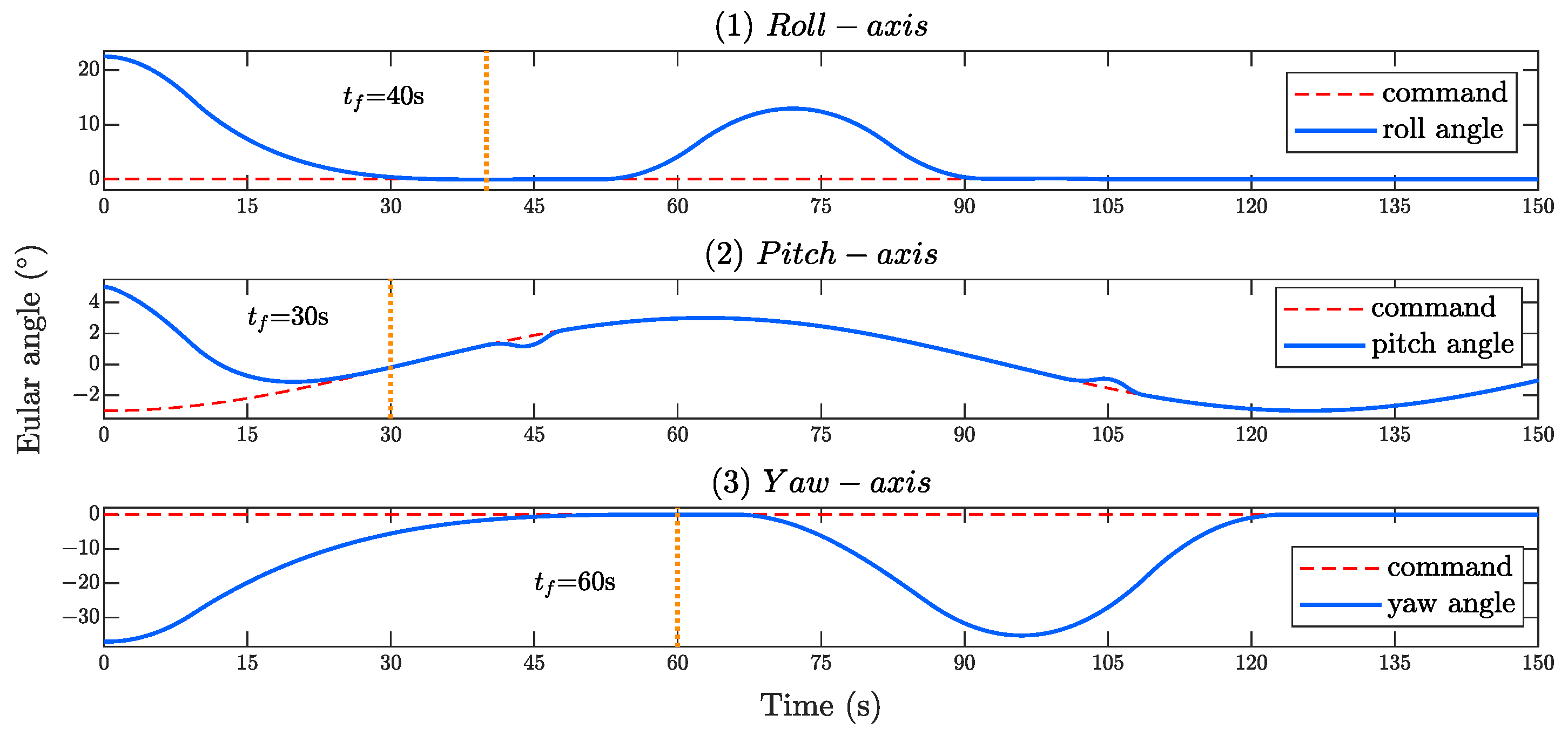
In order to clearly and intuitively show the attitude changes of the spacecraft under the proposed fault-tolerant control law based on ARPC and CES,
Figure 6 shows the three-axis attitude angle time response described by the Euler angle. The red dotted line represents the desired attitude maneuver trajectory, and the blue solid line represents the Euler angle time response under the ARPC. It can be seen that the attitude can converge to the desired trajectory within the specified convergence time
. When
enters the steady-state stage, corresponding to
Figure 7, the Euler angle can still be within the performance envelope under faults or disturbances exceeding the saturation level and finally reconverge to the desired trajectory. This proves the adaptability and robustness of the ARPC proposed in this paper from another perspective.
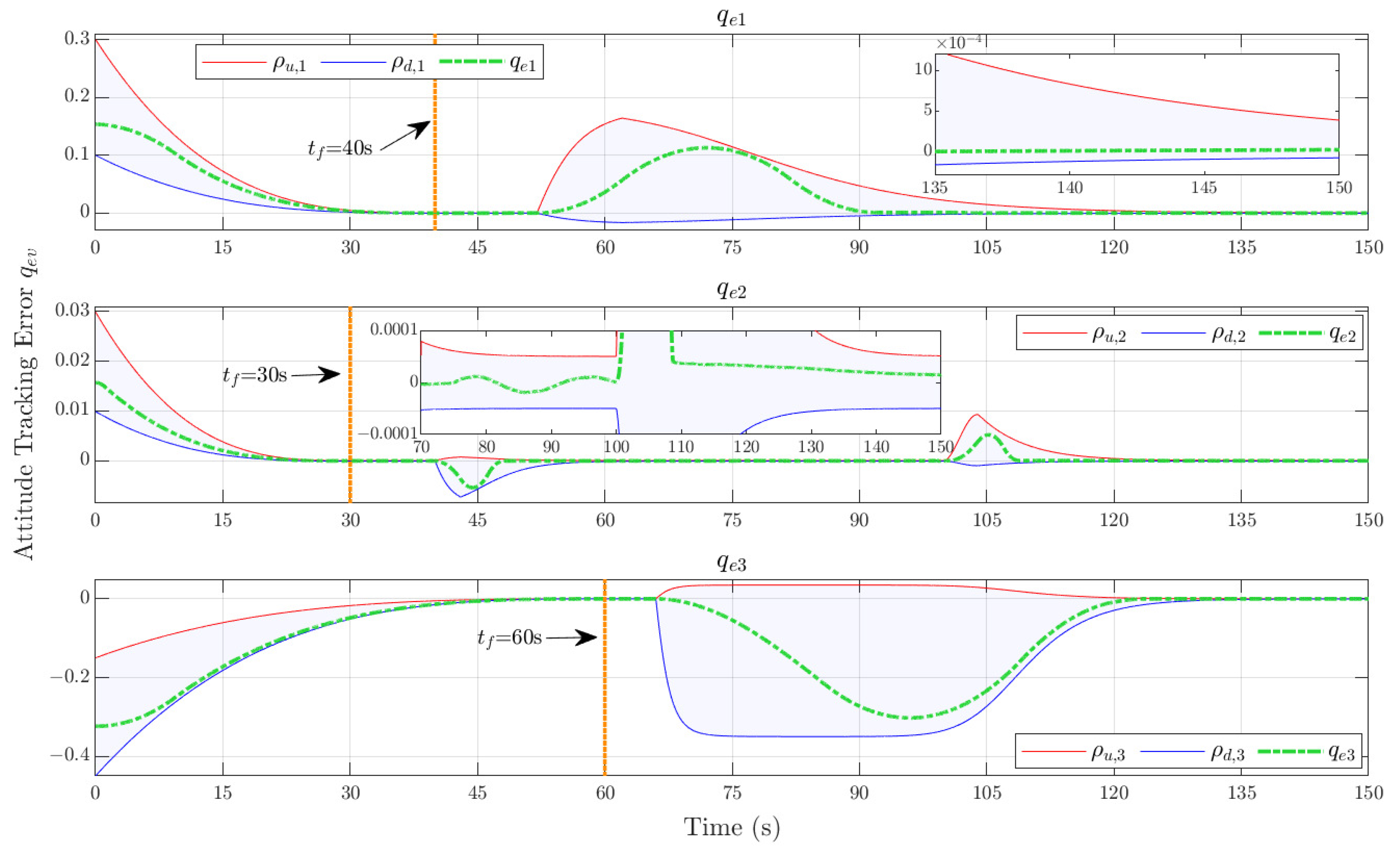
Figure 7 demonstrates the response of the spacecraft attitude under the fault-tolerant control law based on ARPC and CES proposed in this paper. The three sub-figures respectively demonstrate the response of
, and the red and blue solid lines represent the upper boundary
and lower boundary
of the adhesive-resilient prescribed performance envelope respectively. The green dotted line represents the error quaternion
.
First, it can be seen from
Figure 7 that under the same initial envelope
, through the automatic correction of the initial adhesive mechanism
, the initial envelopes of the three axes of roll, pitch, and yaw are adjusted according to different initial errors, and
is accurately captured to the new performance envelope, thereby avoiding the control singularity caused by the error falling outside the envelope. At the same time, the automatic correction of the initial adhesive mechanism
also ensures that there is no overshoot in the transient performance constraint, constrains the attitude error with a narrower and more precise performance envelope, and improves the performance of the controller.
Furthermore, through the proposed fault-tolerant control law, the error
can converge to the steady-state performance range within the appointed time specified by the user. It can always ensure that
is satisfied. Corresponding to the fault in
Figure 5, it is not difficult to see that due to the limitation of ACS actuator saturation, the error will inevitably increase when facing the above-mentioned faults or disturbances exceeding the saturation level. At this time, ARPC can actively relax the performance envelope in advance, temporarily allowing the error to deviate from the ideal steady-state accuracy, and give priority to ensuring the stability of the prescribed performance control. Wait until the fault or disturbance is weakened to the range that the actuator can fully compensate, and then tighten the performance envelope again to achieve higher control accuracy. While solving the robustness and static problems of the prescribed performance control, the conservatism of the controller is greatly reduced. Thanks to the intervention of prescribed performance control, the accuracy of attitude tracking control can reach
after entering the steady-state stage. At the same time, it can ensure excellent control stability.
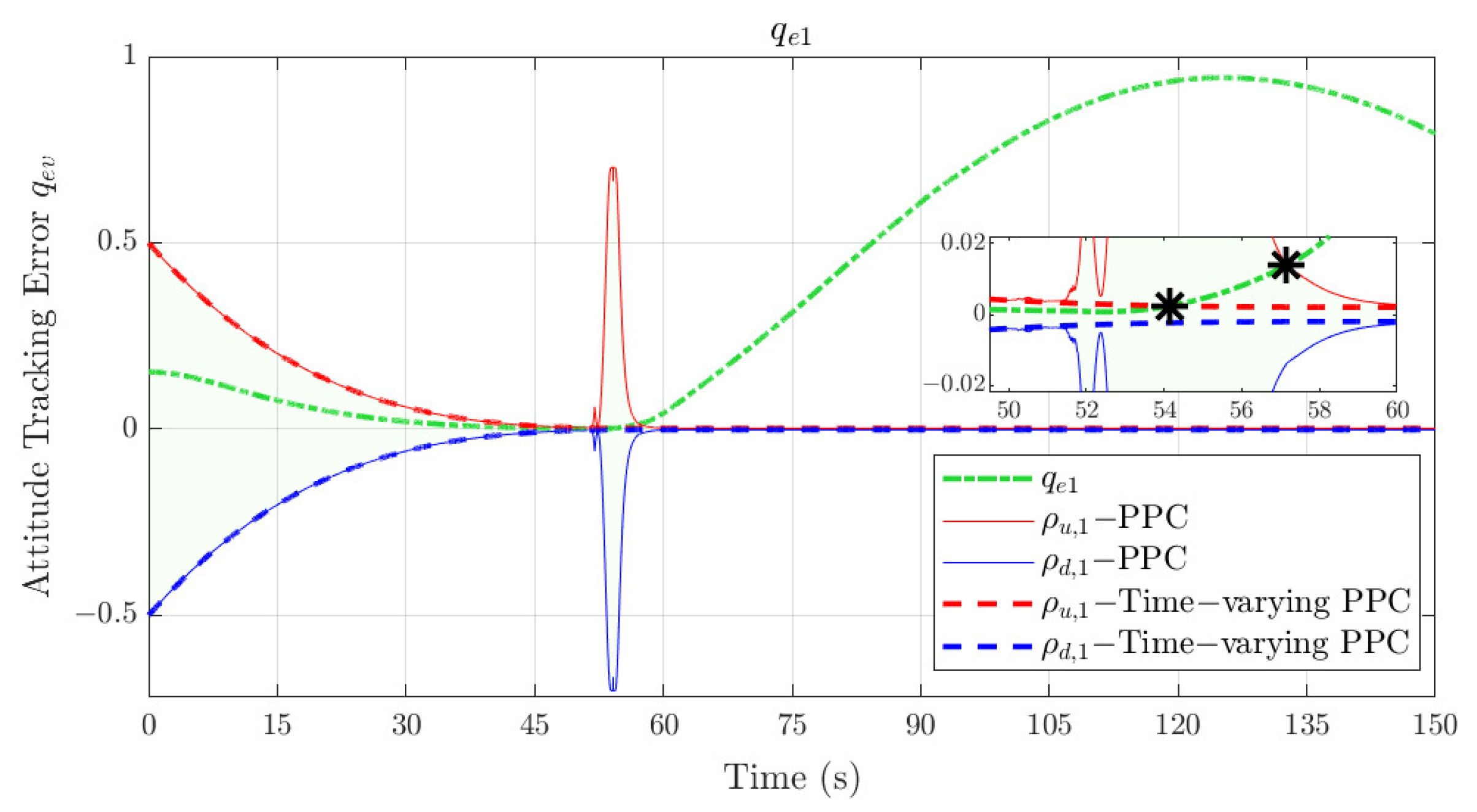
To verify the superiority of the proposed method,
Figure 8 shows the results of applying the existing methods to the same fault scenarios in this section. The blue and red dashed lines represent the traditional PPC lower and upper boundaries in [
14]. The blue and red solid lines represent the improved time-varying PPC lower and upper boundaries in [
19]. As demonstrated in the figure, “∗” means that the error exceeds the inherent performance envelope and it makes the control design suffer from the singularity problem.
It is not difficult to see that the traditional PPC does not have the ability to perform online adaptive adjustment because it is a static function. Therefore, when encountering the same large-scale fault or disturbance, the tracking error will quickly exceed the inherent static envelope, thereby inducing control singularity. Although [
19] provides a mechanism for online correction of PPC based on the error change trend, it only considers the accumulation of errors and does not consider that large-scale faults will induce actuator saturation. This makes it difficult for its online adjustment speed to catch up with the accumulation speed of tracking errors, and the problem of control singularity still exists. In contrast, the method proposed in this paper can generate the resilient performance envelope more accurately by comprehensively evaluating the changing trend of the tracking error and the saturation degree of the actuator and is therefore more effective in dealing with large-scale faults or disturbances.
On the other hand, the method in
Figure 8 cannot achieve convergence within an appointed time, which makes it impossible to constrain transient performance more accurately according to the desired index. It is not difficult to see that the upper and lower boundaries of the PPC in
Figure 8 are symmetrical, which has the disadvantage of being unfavorable for constraining the overshoot. More importantly, the PPC represented by these two methods always exists in the initial performance envelope
, which is heavily dependent on the prior information of
. In other words, when a new control reference is received, the controller needs to re-initialize the parameters of
according to the new
. There is no set of regular adjustment methods and it is too dependent on manual experience. As shown in
Figure 7, the ARPC proposed in this paper can automatically generate a new initial performance envelope through the adhesive mechanism in (
12), avoiding the above problem.
Figure 9 demonstrates the control torque
response of the fault-tolerant control law under the CES update strategy. It can be clearly seen that after the transformation of the CES update strategy, the output torque becomes a step-change response. However, it is worth noting that, unlike the fixed threshold event-trigger mechanism in [
28,
29], the step change is not a fixed increment, but an adaptive increment automatically generated by measuring and compression according to the control input size. This dynamic threshold facilitates more accurate tracking performance and ensures fast response to signal changes when
is large through a constant threshold. Also different from the relative threshold event-trigger mechanism [
26], which is always monotonically increasing, CES can strike a good balance between avoiding signal distortion and dynamic performance.
To further demonstrate the advantages of CES,
Figure 10 shows the trigger levels recorded by the trigger mechanism at different times. Among them, “No Trigger” means that the actuator does not need to be updated; that is, no data are transmitted between the control box and the actuator at this time. “Level 1” to “Level 4” represent higher-level update increments. It is not difficult to see that the higher the level, the fewer the trigger times, and the system is in a non-communication state most of the time. It will only perform transmission based on compression and decompression when necessary to ensure that the tracking error is within the performance envelope.
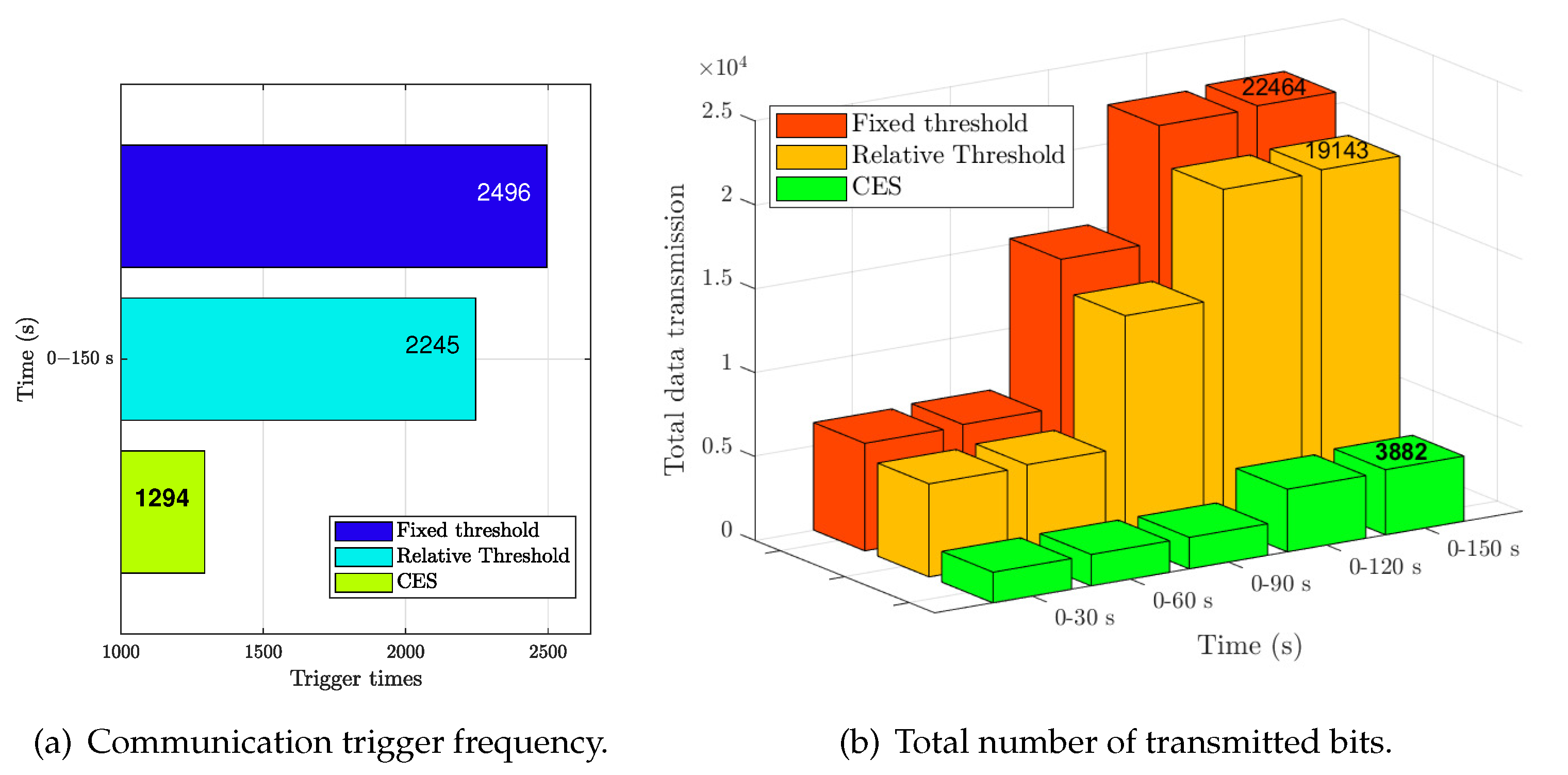
Figure 11a shows the comparison of the number of triggered communications under different event-triggered update strategies, which mainly includes the fixed threshold event trigger mechanism in [
28,
29], the relative threshold event trigger mechanism in [
26] and CET in this paper. It is clear from
Figure 11a that the proposed CES update strategy reduces the frequency of communication compared to other methods. Note that CES and
z-ary compression transmission accomplish a good balance between tracking performance and network constraints. In order to further demonstrate the impact of different
values and coefficient
o selection on CES performance, a brief comparison is made here for the scenario when
. At this time, the communication trigger frequency will increase sharply to 2128. The total number of transmitted bits will also increase synchronously to 12,768. This is due to the increase of
. The number of intervals
l that divide
also increases accordingly, which leads to more refined and easier to achieve trigger condition judgment. The increase of
m directly means that the number of bytes transmitted in a single transmission increases, which will inevitably lead to the increase of the total number of bits transmitted. There is no fixed rule for the selection of coefficient
o. Generally speaking, a larger
o means that the trigger condition is more difficult to achieve, which will reduce the number of triggers. However, it also means more precision loss. The selection of
o should be further weighed according to the required control performance and communication resources.
In addition, the total amount of overall control signal data transmission and its comparison are specifically given in
Figure 11b. It is obvious that CES requires the least amount of data transmission throughout the control process, and that this is far less than other methods. In contrast, the traditional event trigger mechanism only focuses on reducing the communication frequency, while still transmitting the control signal as original data during the communication process, which will result in a single transmission of a 9-bit or even 12-bit string. In each communication between the control box and the actuator, CES compressed the control input error as a 3-bit string. This means that the total amount of data transmission required during the signal transmission process is greatly reduced. At the same time, since the compression and decompression rules are user-defined, there is only a string of
z-ary characters in the communication process. Unlike traditional event-triggered methods, it encodes control signal updates according to a private rule before transmission over the data bus, with the actuator decoding the signal using a predefined decompression rule. Even if it is intercepted, the real control signal cannot be restored due to the lack of decompression rules, effectively preventing data leakage or manipulation. Additionally, by reducing the amount of transmitted data, the scheme lowers communication bandwidth requirements and mitigates the risk of potential data leakage. The dynamic adaptability of the encoding further complicates prediction by attackers, enhancing the overall security of the system. Thus, the proposed method significantly enhances the communication security of spacecraft control systems.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}