
One-Dimensional Shallow Water Equations Ill-Posedness


{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Mathematical Background
2.1. Governing Equations
2.2. Evolution of Internal Perturbations
2.3. Principle of Frozen Coefficients
2.4. Well-Posed Problems
- Problem (20) is considered well-posed if it possesses a unique smooth solution and exhibits stability.
- Problem (20) is stable if there are constants , and , such that:With , is the temporally varying spatial L2 norm for a scalar function, , and is its domain.
2.5. Fourier Transform Problem
3. Methodology
4. Results
4.1. Fourier Transform Solution
4.2. Ill-Posedness Condition
5. Discussion
5.1. Friction Slope
5.2. Physical Interpretation
5.3. Numerical Methods
5.4. Roll Waves
6. Conclusions
- The 1D SWE are ill-posed if the following condition is satisfied:which can be written in terms of the Vedernikov number, when the friction slope is defined as per Equation (3):Thus, , the essential criterion for the emergence of roll waves in uniform flow, is also applicable for unsteady flow when the 1D SWE become ill-posed.
- 2.
- Condition (63) indicates that the 1D SWE become ill-posed, meaning they cannot yield any solution, regardless of the numerical scheme or method employed.
- 3.
- The challenges in simulating transcritical flow stem from the ill-posedness of the 1D SWE, rather than the Preissmann numerical scheme, as previously suggested by various researchers over the years. If the 1D SWE are well-posed (i.e., condition (63) is not satisfied), any stable numerical scheme or method can effectively simulate transcritical flows.
- 4.
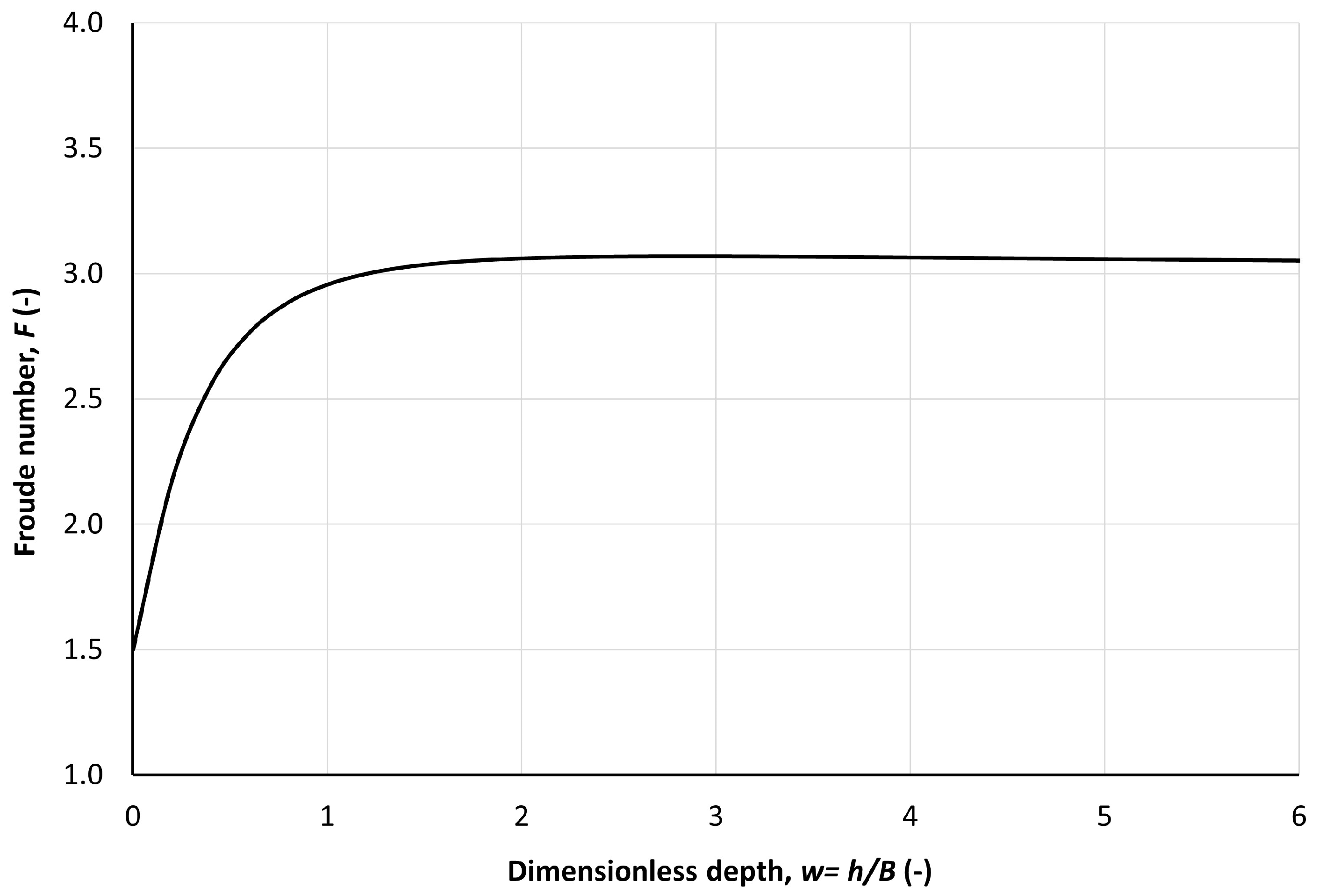
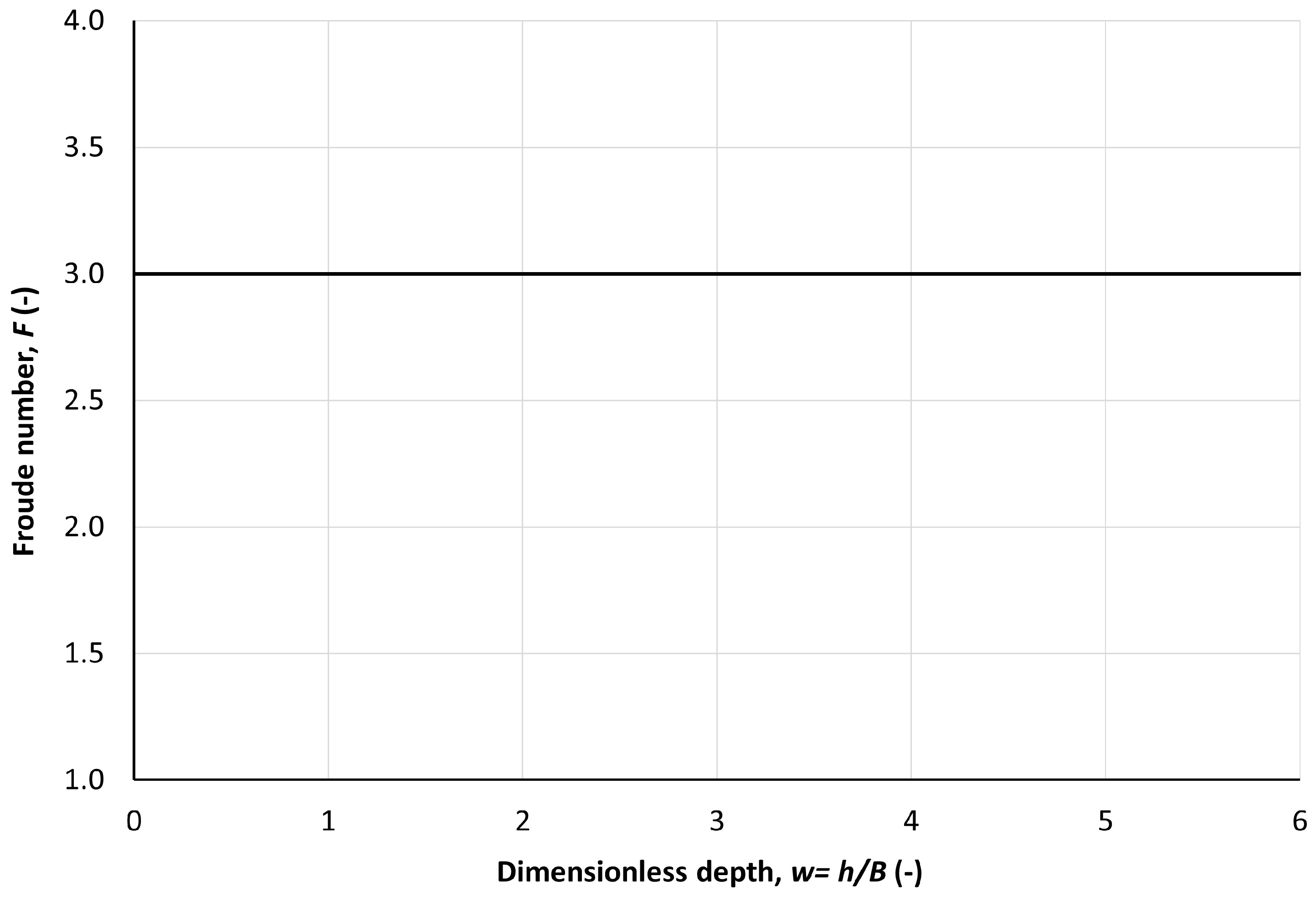
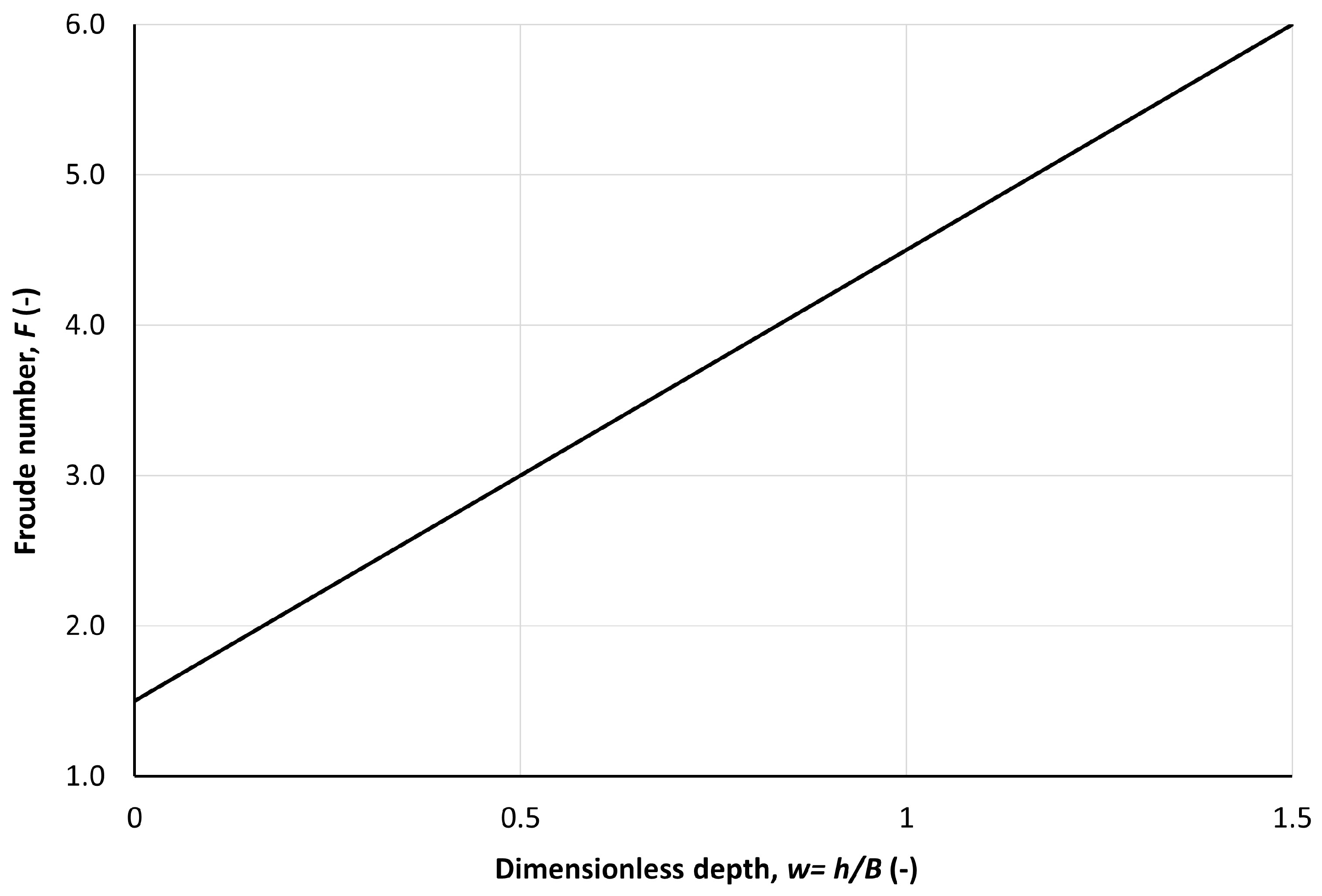
- For a given prismatic channel, the maximum Froude number at which the 1D SWE remains solvable is determined by regardless of the numerical method used. Specifically, for very wide channels, the 1D SWE remain valid for , under the Manning equation for the friction slope, while the Chézy equation allows validity for .
- 5.
- Roll waves formation is revisited in this paper, and a complete procedure to solve the 1D SWE with roll waves formation is provided.
- 6.
- The uniform flow is not possible when the ill-posedness condition is not met. This is an important result, as the design of channels with high slopes is based on uniform flow concept.
- 7.
- Finally, the findings regarding the ill-posedness of the 1D SWE discussed in this paper will enhance the quality of open-channel flow education at both undergraduate and graduate levels, ultimately contributing to the development of well-trained professionals in the field. The Vedernikov number should be integrated into open-channel flow curricula alongside the Froude number.
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 1D SWE | One Dimensional Shallow Water Equations |
| A | wetted area (m2) |
| B | bottom width of a trapezoidal channel (m) |
| Chézy coefficient (m1/2/s) | |
| D = A/T | hydraulic depth (m) |
| Froude number (-) | |
| constants in stability definition | |
| LPI | Local Partial Inertia |
| M | (-) |
| matrix of the perturbed 1D SWE | |
| PDE | Partial Differential Equation |
| R = A/P | hydraulic radius (m) |
| S0 | bed slope (-) |
| Sf | friction slope (-) |
| perturbed friction slope (-) | |
| source term vector of the 1D SWE | |
| source term vector of the perturbation 1D SWE | |
| source term vector of the perturbed 1D SWE | |
| flow field of the perturbed 1D SWE | |
| initial flow field of the 1D SWE | |
| initial perturbation field of the perturbed 1D SWE | |
| T | top water surface width (m) |
| Vedernikov number (-) | |
| in stability definition | |
| function in stability definition | |
| g | gravity acceleration (m/s2) |
| h | water depth (m) |
| depth’s perturbation (m) | |
| , | |
| Manning coefficient (s/m1/3) | |
| t | time independent variable (s) |
| u | flow velocity (m/s) |
| velocity’s perturbation (m/s) | |
| eigenvectors | |
| x | spatial independent variable (m) |
| z | slope side, V:H = 1/z |
| dimensionless depth (-) | |
| Elements of the Jacobian matrix of Sf | |
| constants in stability definition | |
| weighting coefficient of the Preissmann’s scheme (-) | |
| parameter of the LPI technique (-) | |
| wave number (m−1), in the definition of Fourier transform |
Appendix A. Evolution of Internal Perturbation
Appendix B. Fourier Transform Pairs
Appendix C. Matrix Exponential
References
- Cullen, M.J.P. Analysis of the semi-geostrophic shallow water equations. Phys. D Nonlinear Phenom. 2008, 237, 1461–1465. [Google Scholar] [CrossRef]
- Cozzolino, L.; Varra, G.; Cimorelli, L.; Della Morte, R. Mathematical and numerical modelling of rapid transients at partially lifted sluice gates. Adv. Water Resour. 2023, 181, 104562. [Google Scholar] [CrossRef]
- Levermore, C.D.; Sammartino, M. A shallow water model with eddy viscosity for basins with varying bottom topography. Nonlinearity 2001, 14, 1493–1515. [Google Scholar] [CrossRef]
- Majda, A.J. Vorticity and the mathematical theory of incompressible fluid flow. Commun. Pure Appl. Math. 1986, 39, S187–S220. [Google Scholar] [CrossRef]
- Majda, A.J.; Bertozzi, A.L. Vorticity and Incompressible Flow; Cambridge texts in applied mathematics; Cambridge University Press: New York, NY, USA, 2002. [Google Scholar]
- Minatti, l.; Faggioli, L. The exact Riemann Solver to the Shallow Water equations for natural channels with bottom steps. Comput. Fluids 2023, 254, 105789. [Google Scholar] [CrossRef]
- Orenga, P. Un théorème d’existence de solutions d’un problème de shallow water. Arch. Ration. Mech. Anal. 1995, 130, 183–204. [Google Scholar] [CrossRef]
- Pritchard, D.; Dickinson, L. The near-shore behaviour of shallow-water waves with localized initial conditions. J. Fluid Mech. 2007, 591, 413–436. [Google Scholar] [CrossRef]
- Rakotoson, J.M.; Temam, R.; Tribbia, J. Remarks on the nonviscous shallow water equations. Indiana Univ. Math. J. 2008, 57, 2969–2998. [Google Scholar] [CrossRef]
- Varra, G.; Pepe, V.; Cimorelli, L.; Della Morte, R.; Cozzolino, L. The exact solution to the Shallow water Equations Riemann problem at width jumps in rectangular channels. Adv. Water Resour. 2021, 55, 103993. [Google Scholar] [CrossRef]
- Qionglei, C.; Changxing, M.; Zhang, Z. On the Well-Posedness for the Viscous Shallow Water Equations. SIAM J. Math. Anal. 2008, 40, 443–474. [Google Scholar] [CrossRef]
- Preissmann, A. Propagation des Intumescences Dans les Canaux et Les Rivières; Congres de l’Association Française de Calcul: Grenoble, France, 1961; First Congress of the French Association for Computation, Grenoble; pp. 433–442. (In French) [Google Scholar]
- Wu, W. Computational River Dynamics; Taylor & Francis: London, UK, 2008. [Google Scholar]
- Popescu, I. Computational Hydraulics: Numerical Methods and Modeling; IWA Publishing: London, UK, 2014. [Google Scholar]
- Meselhe, E.A.; Holly, F.M., Jr. Invalidity of Preissmann scheme for transcritical flow. J. Hydraul. Eng. 1997, 123, 652–655. [Google Scholar] [CrossRef]
- Johnson, T.; Baines, M.J.; Sweby, P.K. A box scheme for transcritical flow. Int. J. Numer. Methods Eng. 2002, 55, 895–912. [Google Scholar] [CrossRef]
- Freitag, M.A.; Morton, K.W. The Preissmann box scheme and its modification for transcritical flows. Int. J. Numer. Methods Eng. 2007, 70, 791–811. [Google Scholar] [CrossRef]
- Sart, C.; Baume, J.P.; Malaterre, P.O.; Guinot, V. Adaptation of Preissmann’s scheme for transcritical open channel flows. J. Hydraul. Res. 2010, 48, 428–440. [Google Scholar] [CrossRef]
- Samuels, P.G.; Skeels, C.P. Stability limits for Preissmann’s scheme. J. Hydraul. Eng. 1990, 116, 997–1012. [Google Scholar] [CrossRef]
- Kutija, V.; Newett, C.J.M. Modelling of supercritical flow conditions revisited; NewC Scheme. J. Hydraul. Res. 2002, 40, 145–152. [Google Scholar] [CrossRef]
- AlQasimi, E.; Mahdi, T.-F. A new one-dimensional numerical model for unsteady hydraulics of sediments in rivers. Discov. Appl. Sci. 2020, 2, 1480. [Google Scholar] [CrossRef]
- Yu, C.-W.; Hodges, B.R.; Liu, F. A new form of the Saint-Venant equations for variable topography. Hydrol. Earth Syst. Sci. 2020, 24, 4001–4024. [Google Scholar] [CrossRef]
- Fread, D.L.; Jin, M.; Lewis, J.M. An LPI Numerical Implicit Solution for Unsteady Mixed Flow Simulations. In Proceedings of the ASCE North American Water and Environment Congress, Anaheim, CA, USA, 22–28 June 1996. [Google Scholar]
- Fread, D.L.; Lewis, J.M. FLDWAV: A generalized Flood Routing Model. In Proceedings of the National Conference on Hydraulic Engineering, ASCE, Colorado Springs, CO, USA, 8–12 August 1998; pp. 668–673. [Google Scholar]
- DHI. MIKE 11—A Modelling System for Rivers and Channels; DHI—Water & Environment: Hørsholm, Denmark, 2004. [Google Scholar]
- US Army Corps of Engineers. HEC-RAS River Analysis System, Hydraulic Reference Manual, Version 6.0.; Hydrologic Engineering Center: Davis, CA, USA, 2020; 518p.
- Neumaier, A. Solving ill-conditioned and singular linear systems: A tutorial on regularization. SIAM Rev. 1998, 40, 636–666. [Google Scholar] [CrossRef]
- Chow, V.T. Open-Channel Hydraulics; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Henderson, F.M. Open Channel Flow; MacMillian: New York, NY, USA, 1966. [Google Scholar]
- Chaudhry, M.H. Open-Channel Flow, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2008; p. 523. [Google Scholar]
- Liggett, J.A. Stability. Unsteady Flow in Open Channels, 1st ed.; Water Resources Publications: Fort Collins, CO, USA, 1975. [Google Scholar]
- Cunge, J.A.; Holly Jr, F.M.; Verwey, A. Practical Aspects of Computational River Hydraulics; Pitman Publishing: Lanham, MD, USA, 1980. [Google Scholar]
- Godounov, S.; Riabenki, V. Schémas Aux Différences (French); Editions Mir: Moscow, Russia, 1977; 361p. [Google Scholar]
- Vedernikov, V.V. Characteristic Features of a Liquid Flow in an Open Channel, C.-R. (Doklady); Academy of Sciences of the USSR: Moscow, Russia, 1946; pp. 207–210. [Google Scholar]
- Dooge, J.C.I. Linear Theory of Hydrologic Systems; United States Department of Agriculture: Washington, DC, USA, 1973. [Google Scholar]
- Ponce, V.M.; Simons, B. Shallow Wave Propagation in Open Channel Flow. J. Hydraul. Div. 1977, 103, 1461–1476. [Google Scholar] [CrossRef]
- Hadamard, J. Sur les Problèmes Aux Dérivées Partielles et Leur Signification Physique; Princeton University Bulletin: Princeton, NJ, USA, 1902; pp. 49–52. [Google Scholar]
- Gustafsson, B.; Kreiss, H.-O.; Oliger, J. Time-Dependent Problems and Difference Methods, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013; Volume 123. [Google Scholar]
- Bronshtein, I.N.; Semendyayev, K.A.; Musiol, G.; Muehlig, H. Handbook of Mathematics, 5th ed.; Springer: Berlin/Heidelberg, Germany, 2007; p. 1164. [Google Scholar]
- Sturm, T.W. Open Channel Hydraulics; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Kvočka, D.; Ahmadian, R.; Falconer, R.A. Flood Inundation Modelling of Flash Floods in Steep River Basins and Catchments. Water 2017, 9, 705. [Google Scholar] [CrossRef]
- Mingham, C.G.; Causon, D.M.; Ingram, D.; Mingham, C.G.; Causon, D.M.; Ingram, D. A TVD MacCormack scheme for transcritical flow. In Proceedings of the Institution of Civil Engineers—Water and Maritime Engineering; ICE Virtual Library (ICE Publishing): London, UK, 2001; Volume 148, pp. 167–175. [Google Scholar] [CrossRef]
- Hirsch. Numerical Computation of Internal and External Flows. Vol.1: Fundamentals of Numerical Discretization; John Wiley: Chichester, UK, 1988. [Google Scholar]
- Powell, R.W. Vedernikov’s criterion for ultra-rapid flow. Trans. Am. Geophys. Union 1948, 29, 882–886. [Google Scholar]
- Chen, C. Free-Surface Stability Criterion as Affected by Velocity Distribution. J. Hydraul. Eng. 1995, 121, 736–743. [Google Scholar] [CrossRef]
- French, R.H. Open-Channel Flow; McGraw-Hill, Inc.: New York, NY, USA, 1985; 551p. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdi, T.-F. One-Dimensional Shallow Water Equations Ill-Posedness. Mathematics 2025, 13, 2476. https://doi.org/10.3390/math13152476
Mahdi T-F. One-Dimensional Shallow Water Equations Ill-Posedness. Mathematics. 2025; 13(15):2476. https://doi.org/10.3390/math13152476
Chicago/Turabian StyleMahdi, Tew-Fik. 2025. "One-Dimensional Shallow Water Equations Ill-Posedness" Mathematics 13, no. 15: 2476. https://doi.org/10.3390/math13152476
APA StyleMahdi, T.-F. (2025). One-Dimensional Shallow Water Equations Ill-Posedness. Mathematics, 13(15), 2476. https://doi.org/10.3390/math13152476