


Optimal Design of Linear Quadratic Regulator for Vehicle Suspension System Based on Bacterial Memetic Algorithm
 ,
, 

Abstract
1. Introduction
- This paper proposes an LQR-BMA control technique that significantly minimizes the vertical displacement and velocity of the vehicle body and suspension, thereby enhancing the ride comfort and stability of the vehicle.
- This article presents a comprehensive and comparative study of the proposed model alongside other heuristic methods, offering insights into the role of evolutionary algorithms in enhancing the performance of car suspension systems.
- This research demonstrates that LQR-BMA is a reliable, robust control strategy suitable for vehicle suspension systems.
2. Materials and Methods
2.1. Mathematical Modeling
2.1.1. Equations of Motion
2.1.2. The State Space Equations Have the General Form

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Mean Value | Deviation |
|---|---|---|
| kr | N/m | 0 N/m |
| br | 1450 Ns/m | −550 + 450 Ns/m |
| kk | N/m | N/m |
| mc | 395.3 Kg | −42.77 + 75.38 Kg |
| mk | 48.3 Kg | 0 Kg |
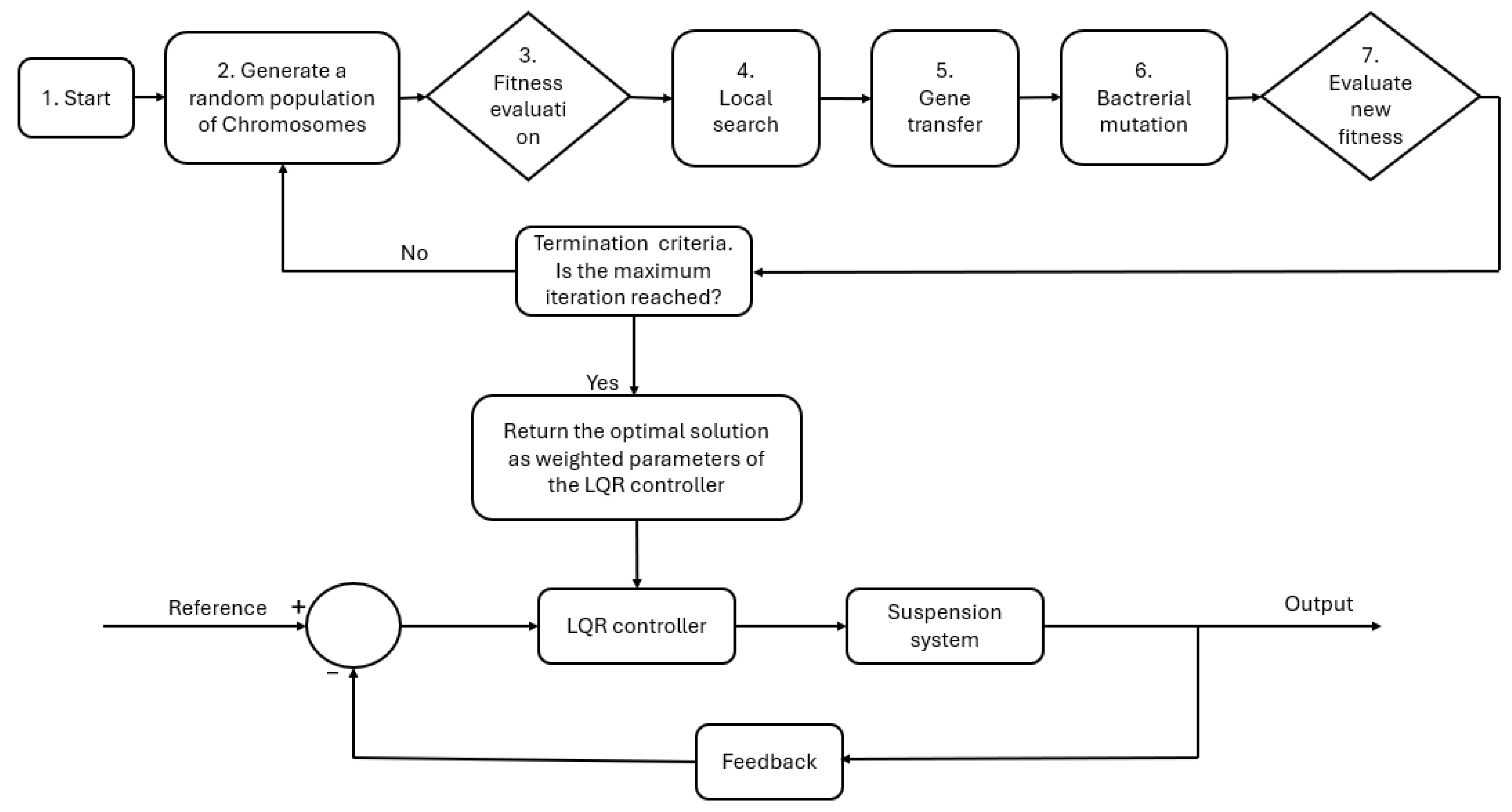
2.2. Bacterial Memetic Algorithm
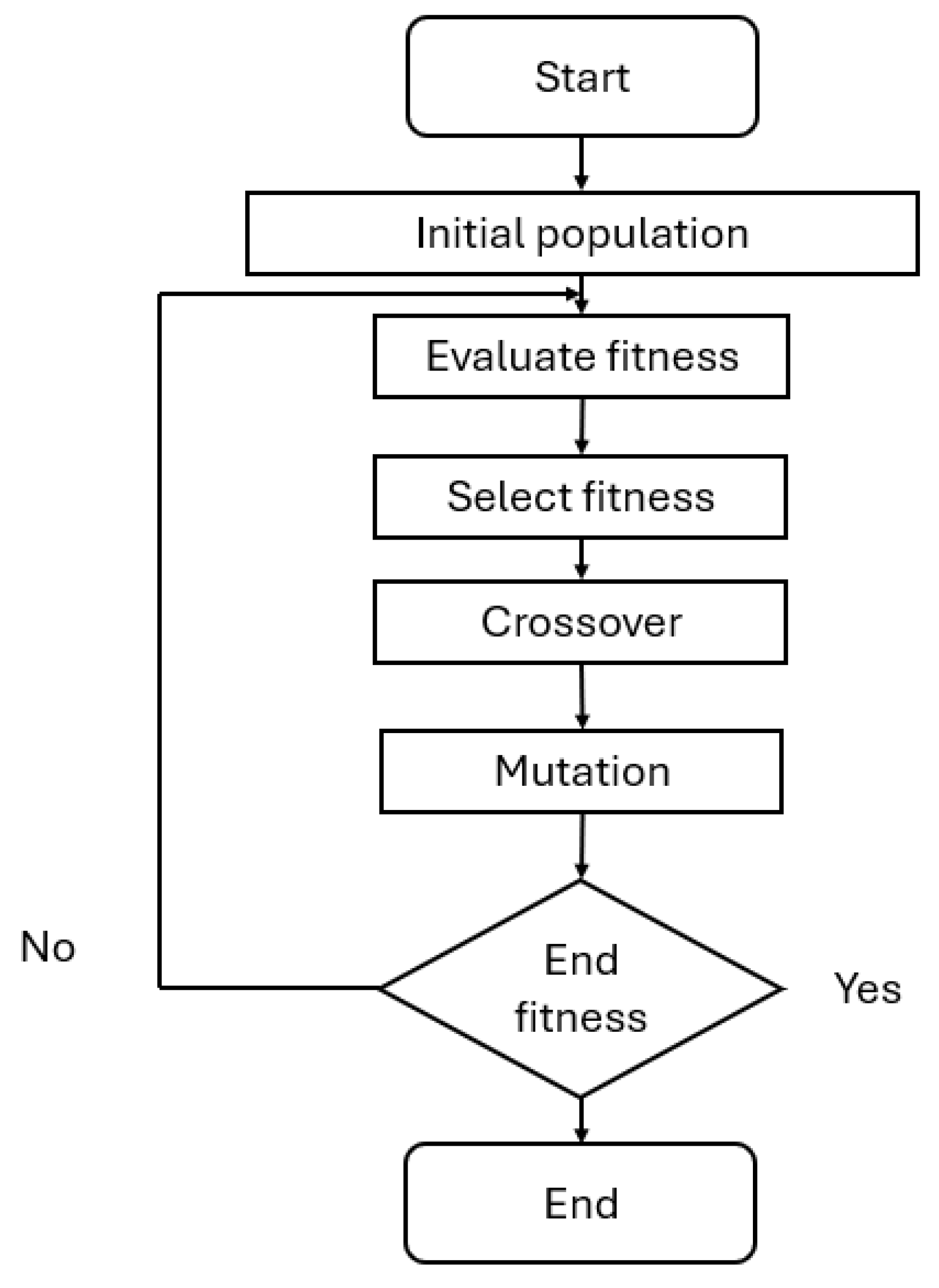
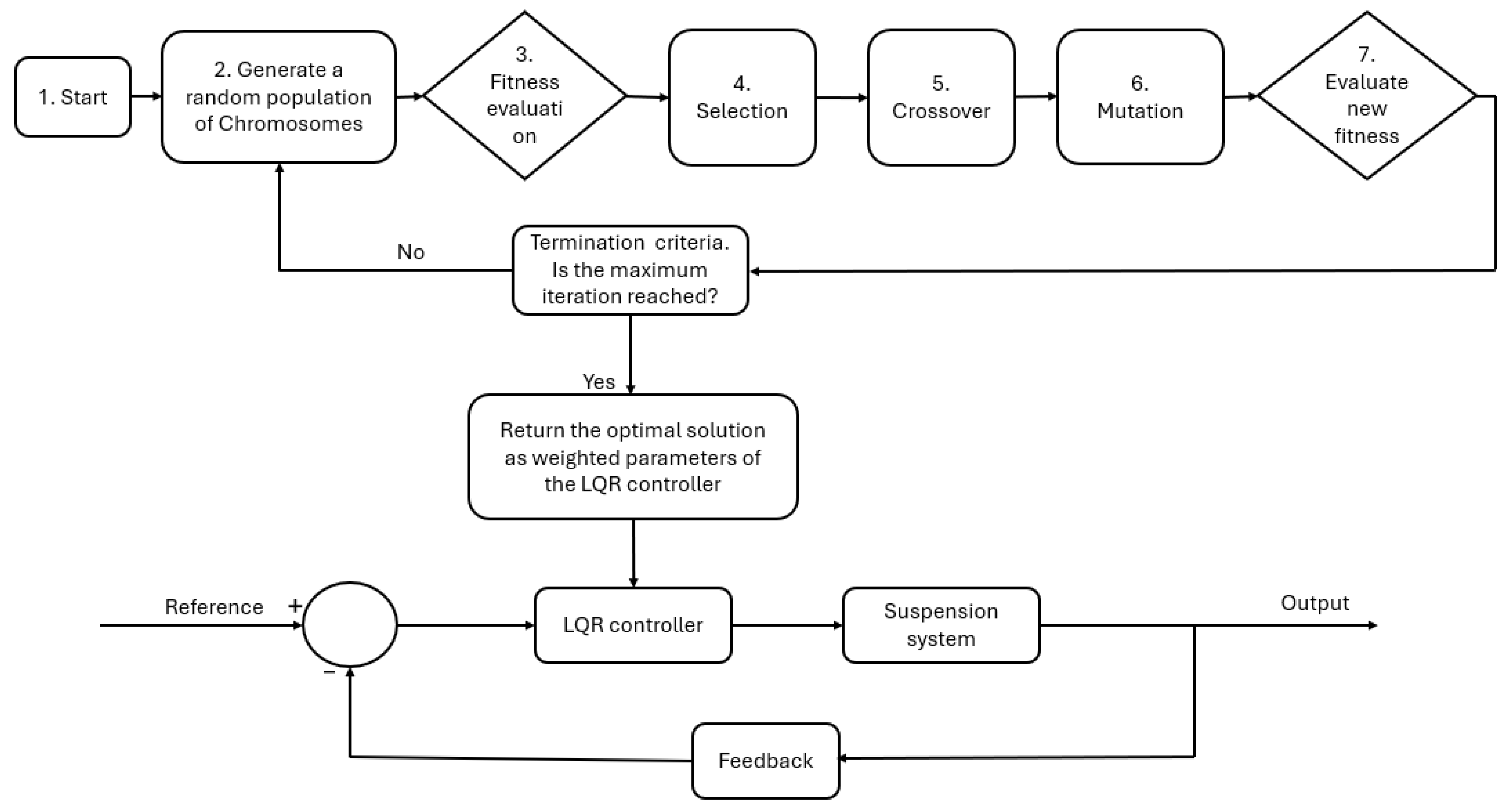
2.3. Genetic Algorithm (GA)
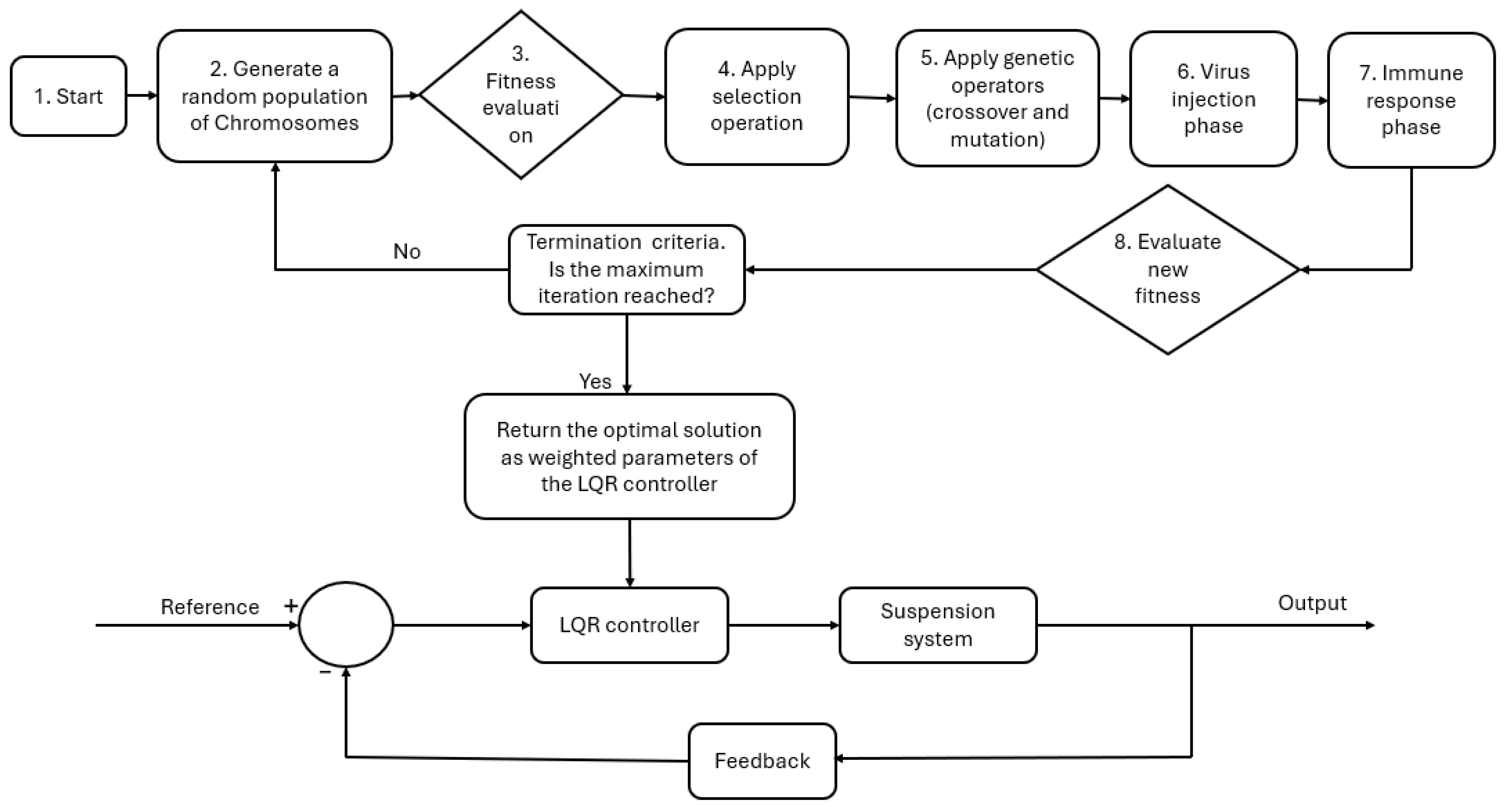
2.4. Virus Evolutionary Genetic Algorithm (VEGA)
2.5. Linear Quadratic Regulator (LQR)
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maaruf, M.; Hamanah, W.M.; Abido, M.A. Hybrid Backstepping Control of a Quadrotor Using a Radial Basis Function Neural Network. Mathematics 2023, 11, 991. [Google Scholar] [CrossRef]
- Gaya, M.S.; Bature, A.; Yusuf, L.A.; Madugu, I.S.; Abubakar, U.; Abubakar, S.A. Comparison of Control Strategies Applied to Nonlinear Quarterly Car Passive Suspension System. Int. Rev. Autom. Control 2015, 8, 203–208. [Google Scholar] [CrossRef]
- Jiregna, I.; Sirata, G. A review of the vehicle suspension system. J. Mech. Energy Eng. 2020, 4, 109–114. [Google Scholar] [CrossRef]
- Abdolvahab, A.; Shfiei, S.G.; Armin, B. Simulation and analysis of passive and active suspension system using quarter car model for different road profile. Int. J. Eng. Trends Technol. 2012, 3, 636–644. [Google Scholar]
- Li, W.; Liang, H.; Xia, D.; Fu, J.; Yu, M. Explicit model predictive control of magnetorheological suspension for all-terrain vehicles with road preview. Smart Mater. Struct. 2024, 33, 035037. [Google Scholar] [CrossRef]
- Ro, P.L.; Kim, C.; Kim, H. An Active Suspension System using Fuzzy Logic Control. In Proceedings of the American Control Conference, San Francisco, CA, USA, 2–4 June 1993; pp. 2252–2253. [Google Scholar]
- Katal, N.; Singh, S.K. Optimization of PID controller for quarter-car suspension system using genetic algorithm. Int. J. Adv. Res. Comput. Eng. Technol. 2012, 1, 30–32. [Google Scholar]
- Amit, B.P.; Jagrut, G.J.; Nikunj, V.; Nirav, G.M. Development of active suspension system for car using fuzzy logic controller, PID and genetically optimize PID controller. J. Inf. Knowl. Res. Electr. Eng. 2013, 2, 347–351. [Google Scholar]
- Abroon, J.Q.; Umar, A.F.; Afzal, K.; Tahir, M.K.; Farrukh, M.; Ali, F. Optimization of semi-active suspension system using particle swarm optimization algorithm. AASRI Conf. Intell. Syst. Control 2013, 4, 160–166. [Google Scholar]
- Ahmed, S.A.; Ali, A.S.; Ghazaly, N.M.; Abdel-Jaber, G. PID controller of active suspension system for a quarter car model. Int. J. Adv. Eng. Technol. 2015, 8, 890–909. [Google Scholar]
- Du, H.; Zhang, N. Fuzzy Control for Nonlinear Uncertain Electrohydraulic Active Suspensions With Input Constraint. IEEE Trans. Fuzzy Syst. 2009, 17, 343–356. [Google Scholar]
- Rashid, M.M.; Rahim, N.A.; Hussain, M.A.; Mohamed, F. Development and Testing of Hybrid Fuzzy Logic Controller for Car Suspension System Using Magneto-Rheological Damper. In Proceedings of the Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar]
- Biglarbegian, M.; Melek, W.; Golnaraghi, F. Intelligent Control of Vehicle Semi-Active Suspension Systems for improved Ride Comfort and Road Handling. In Proceedings of the Fuzzy Information on the North American Annual Meeting, Montreal, QC, Canada, 3–6 June 2006; pp. 19–24. [Google Scholar]
- Diao, S.; Zhao, X.; Zhao, D.; Dong, Z.; Qin, Y. Active suspension hierarchical control with parameter uncertainty and external disturbance of electro-hydraulic actuators. Appl. Math. Model. 2024, 134, 50–70. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, T.; Zhang, J.; Wang, X.; Guo, X. Adaptive finite-time fuzzy prescribed performance fault-tolerant control for uncertain active suspensions with actuator nonlinear characteristics. J. Sound Vib. 2025, 618, 119232. [Google Scholar] [CrossRef]
- Shen, Y.; Li, J.; Huang, R.; Yang, X.; Chen, J.; Chen, L.; Li, M. Vibration control of vehicle ISD suspension based on the fractional-order SH-GH stragety. Mech. Syst. Signal Process. 2025, 234, 112880. [Google Scholar] [CrossRef]
- Wang, G.; Deng, J.; Duan, D.; Zhou, T.; Liu, S. Constrained H∞ optimal control for nonlinear active suspensions via data-driven reinforcement learning algorithm. J. Comput. Nonlinear Dyn. 2025, 20, 071007. [Google Scholar] [CrossRef]
- Botzheim, J.; Toda, Y.; Kubota, N. Bacterial memetic algorithm for offline path planning. Memetic Comp. 2012, 4, 73–86. [Google Scholar] [CrossRef]
- Zhou, D.; Fang, Y.; Botzheim, J.; Kubota, N.; Liu, H. Bacterial memetic algorithm based feature selection for surface EMG based hand motion recognition in long-term use. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016. [Google Scholar]
- Horváth, C.M.; Botzheim, J.; Thomessen, T.; Korondi, P. Bacterial memetic algorithm trained fuzzy system-based model of single weld bead geometry. IEEE Access 2020, 8, 164864–164881. [Google Scholar] [CrossRef]
- Kovács, S.; Budai, C.; Botzheim, J. Colonial bacterial memetic algorithm and its application on a darts playing robot. Sci. Rep. 2025, 15, 10757. [Google Scholar] [CrossRef] [PubMed]
- Holló-Szabó, Á.; Botzheim, J. Bacterial memetic algorithm for asymmetric capacitated vehicle-routing problem. Electronics 2022, 11, 3758. [Google Scholar] [CrossRef]
- Botzheim, J.; Cabrita, C.; Kóczy, L.T.; Ruano, A.E. Fuzzy rule extraction by bacterial memetic algorithms. Int. J. Intell. Syst. 2009, 24, 312–339. [Google Scholar] [CrossRef]
- Gál, L.; Kóczy, L.T.; Lovassy, R. Function Approximation Performance of Fuzzy Neural Networks Based on Frequently Used Fuzzy Operations and a Pair of New Trigonometric Norms. In Proceedings of the International Conference on Fuzzy Systems, Barcelona, Spain, 18–23 July 2010. [Google Scholar]
- Gál, L.; Kóczy, L.T.; Lovassy, R. Three Step Bacterial Memetic Algorithm. In Proceedings of the 14th International Conference on Intelligent Engineering Systems, Las Palmas of Gran Canaria, Spain, 5–7 May 2010. [Google Scholar]
- Ali, A.S.; Jaber, G.A.; Ghazaly, N.M. H∞ Control of Active Suspension System for a Quarter Car Model. Int. J. Veh. Struct. Syst. 2016, 8, 35–40. [Google Scholar] [CrossRef]
- Zhao, W.; Liang, G. Hybrid Particle Swarm Optimization Genetic LQR Controller for Active Suspension. Appl. Sci. 2023, 13, 8204. [Google Scholar] [CrossRef]
- Van der Sande, T.P.J.; Gysen, B.L.J.; Besselink, I.J.M.; Paulides, J.J.H.; Lomonova, E.A.; Nijmeijer, H. Robust control of an electromagnetic active suspension system: Simulations and Measurements. Mechatronics 2013, 23, 204–212. [Google Scholar] [CrossRef]
- Levenberg, K. A method for the solution of certain non-linear problems. Q. Appl. Math. 1994, 2, 164–168. [Google Scholar] [CrossRef]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Cabrita, C.; Botzheim, J.; Gedeon, T.D.; Ruano, A.E.; Koczy, L.T.; Fonseca, C. Bacterial Memetic Algorithm for Fuzzy Rule Base Optimization. In Proceedings of the 2006 World Automation Congress, Budapest, Hungary, 24–26 July 2006. [Google Scholar]
- Udvardy, K.; Görbe, P.; Bódis, T.; Botzheim, J. Conceptual Framework for Adaptive Bacterial Memetic Algorithm Parameterization in Storage Location Assignment Problem. Mathematics 2024, 12, 3688. [Google Scholar] [CrossRef]
- Moscato, P. On evolution, search, optimization, genetic algorithms and martial arts: Towards memetic algorithms. Caltech Concurr. Comput. Program C3P Rep. 1989, 826, 37. [Google Scholar]
- Blickle, T.; Thiele, L. A comparison of selection schemes used in evolutionary algorithms. Evol. Comput. 1996, 4, 361–394. [Google Scholar] [CrossRef]
- Mathew, T.V. Genetic Algorithm; IIT Bombay: Mumbai, India, 2012. [Google Scholar]
- Arabali, A.; Ghofrani, M.; Etezadi-Amoli, M.; Fadali, M.S.; Baghzouz, Y. Genetic-algorithm-based optimization approach for energy management. IEEE Trans. Power Deliv. 2012, 28, 162–170. [Google Scholar] [CrossRef]
- West, C.; Montazeri, A.; Monk, S.D.; Taylor, C.J. A genetic algorithm approach for parameter optimization of a 7DOF robotic manipulator. IFAC-PapersOnLine 2016, 49, 1261–1266. [Google Scholar] [CrossRef]
- Sime, T.L.; Aluvada, P.; Habtamu, S.; Tolosa, Z. Modeling of genetic algorithm tuned adaptive fuzzy fractional order PID speed control of permanent magnet synchronous motor for electric vehicle. Discov. Appl. Sci. 2024, 6, 505. [Google Scholar] [CrossRef]
- Saito, S. A genetic algorithm by use of virus evolutionary theory for scheduling problem. In Proceedings of the Korea Society for Simulation Conference, Seoul, Republic of Korea, 24–26 October 2001. [Google Scholar]
- Kubota, N.; Fukuda, T.; Shimojima, K. Trajectory planning of cellular manipulator system using virus-evolutionary genetic algorithm. Robot. Auton. Syst. 1996, 19, 85–94. [Google Scholar] [CrossRef]





| Simulation Parameter | Value |
|---|---|
| Selection strategy | Random |
| Number of bacteria. | 150 |
| Number of generations | 50 |
| Number of variables | 5 |
| Lower limit (LL) | ] |
| Upper limit (UL) | ] |
| Simulation Parameter | Value |
|---|---|
| Selection strategy | Random |
| Population size | 150 |
| Number of generations | 50 |
| Count of variables | 5 |
| Lower limit (LL) | ] |
| Upper limit (UL) | ] |
| Simulation Parameter | Value |
|---|---|
| Selection strategy | Random |
| Population size | 150 |
| Number of generations | 50 |
| Count of variables | 5 |
| Lower limit (LL) | ] |
| Upper limit (UL) | ] |
| Mutation rate | 0.3 |
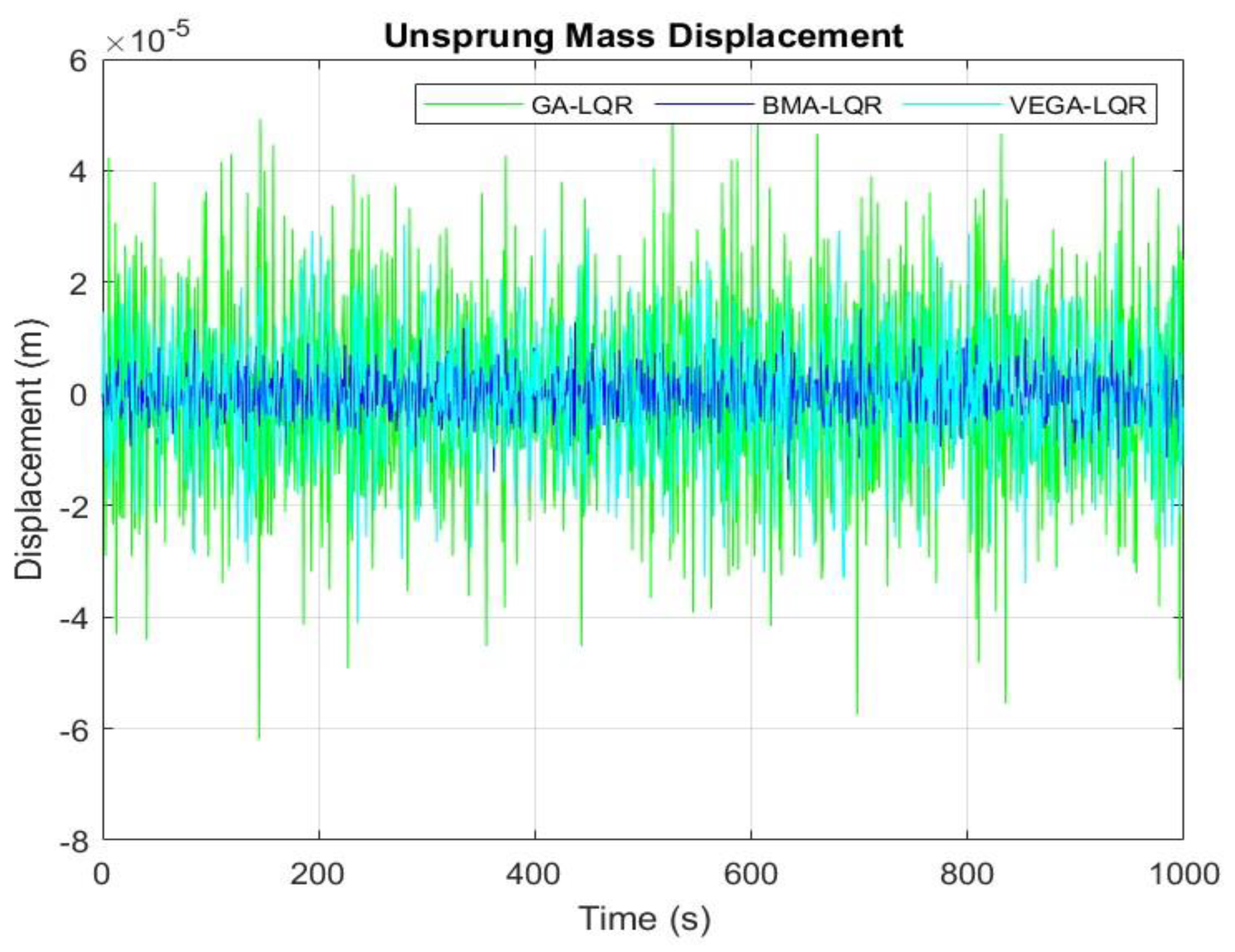
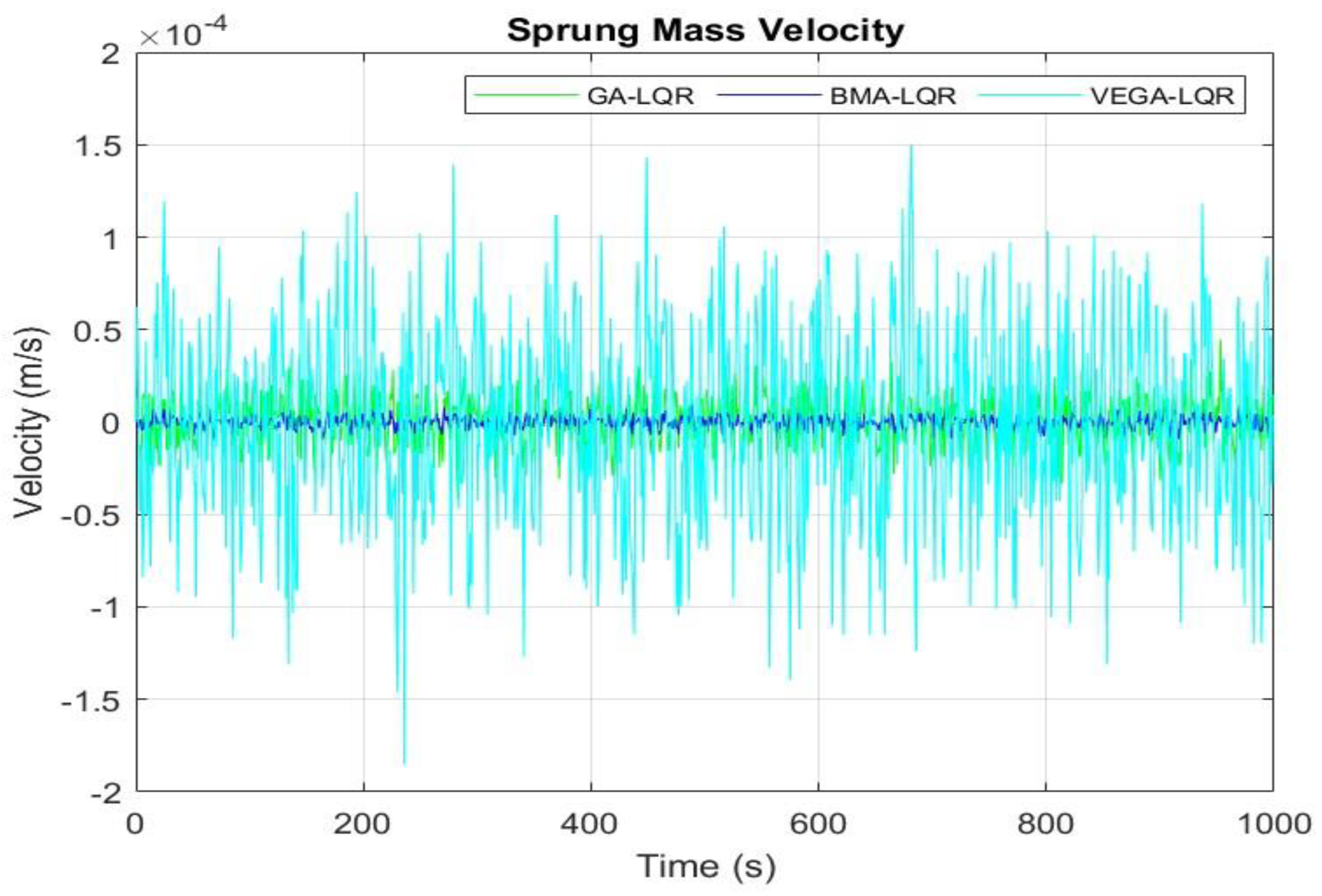
| Optimization Algorithm | Max. Sprung Mass Displacement (m) | Max. Unsprung Mass Displacement (m) | Max. Sprung Mass Velocity (m/s) | Max. Unsprung Velocity (m/s) |
|---|---|---|---|---|
| BMA | ||||
| GA | ||||
| VEGA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magaji, B.A.; Babangida, A.; Kunya, A.B.; Szemes, P.T. Optimal Design of Linear Quadratic Regulator for Vehicle Suspension System Based on Bacterial Memetic Algorithm. Mathematics 2025, 13, 2418. https://doi.org/10.3390/math13152418
Magaji BA, Babangida A, Kunya AB, Szemes PT. Optimal Design of Linear Quadratic Regulator for Vehicle Suspension System Based on Bacterial Memetic Algorithm. Mathematics. 2025; 13(15):2418. https://doi.org/10.3390/math13152418
Chicago/Turabian StyleMagaji, Bala Abdullahi, Aminu Babangida, Abdullahi Bala Kunya, and Péter Tamás Szemes. 2025. "Optimal Design of Linear Quadratic Regulator for Vehicle Suspension System Based on Bacterial Memetic Algorithm" Mathematics 13, no. 15: 2418. https://doi.org/10.3390/math13152418
APA StyleMagaji, B. A., Babangida, A., Kunya, A. B., & Szemes, P. T. (2025). Optimal Design of Linear Quadratic Regulator for Vehicle Suspension System Based on Bacterial Memetic Algorithm. Mathematics, 13(15), 2418. https://doi.org/10.3390/math13152418