
General Construction Method and Proof for a Class of Quadratic Chaotic Mappings

Abstract
1. Introduction
- ➢
- By integrating the necessary conditions for single-peak mapping with robust chaos theorems, this paper proposes a general construction methodology for quadratic chaotic maps and provides rigorous proof of its validity.
- ➢
- Based on the proposed methodology, two quadratic chaotic maps under distinct conditions are constructed. Their chaotic characteristics are confirmed through analysis of ergodic properties in phase space, bifurcation diagrams, and Lyapunov exponent spectra. Subsequently, comparative 0–1 testing and SE complexity analysis against the conventional logistic map demonstrate the enhanced chaotic properties of the quadratic chaotic systems.
2. Robust Chaos for General Quadratic Mapping
3. Example Verification
3.1. The Quadratic Discrete Mapping
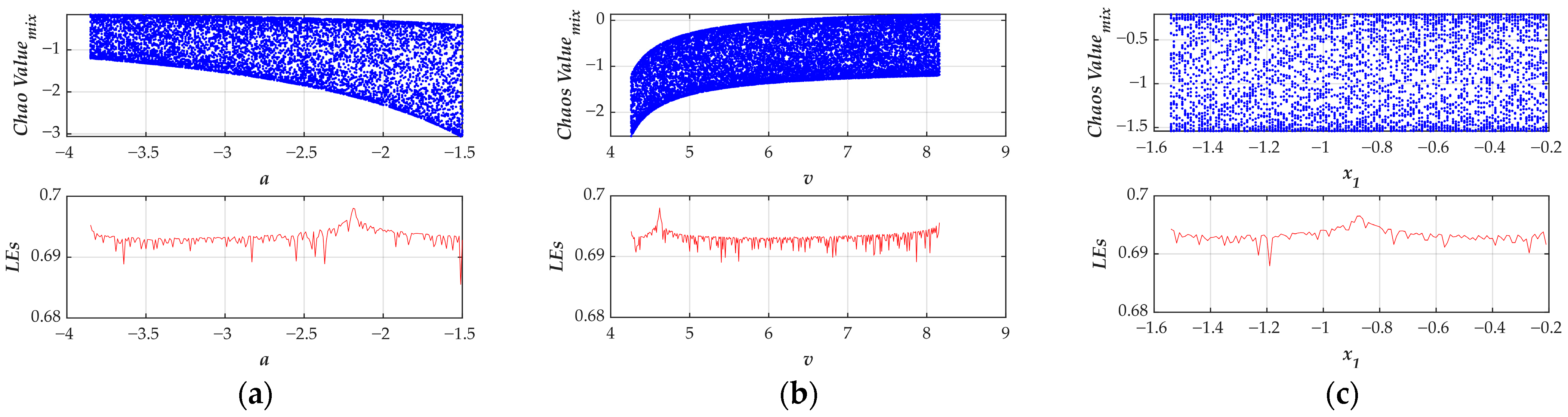
3.2. Bifurcation Diagrams and Lyapunov Exponent Spectra
3.3. Chaos Detection: 0–1 Test and SE Complexity Metrics
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- May, R.M. Simple mathematical models with very complicated dynamics. Nature 1976, 261, 459–467. [Google Scholar] [CrossRef]
- Liao, G.; Wang, L. Almost periodicity, chain recurrence and chaos. Isr. J. Math. 1996, 93, 145–156. [Google Scholar] [CrossRef]
- Hoppe, V. Specification of geometrical parameters for elements with cubic mapping functions. Int. J. Numer. Methods Eng. 1973, 7, 94–98. [Google Scholar] [CrossRef]
- Zhao, H.; Xie, S.; Zhang, J.; Wu, T. A Dynamic Block Image Encryption Using Variable-Length Secret Key and Modified Henon. Map. Opt. 2021, 230, 166307. [Google Scholar] [CrossRef]
- Feng, W.; Zhang, J.; Chen, Y.; Qin, Z.; Zhang, Y.; Ahmad, M.; Woźniak, M. Exploiting robust quadratic polynomial hyperchaotic map and pixel fusion strategy for efficient image encryption. Expert Syst. Appl. 2024, 246, 123190. [Google Scholar] [CrossRef]
- Gu, Y.; Li, G.; Xu, X.; Song, X.; Zhong, H. Solution of a new high-performance fractional-order Lorenz system and its dynamics analysis. Nonlinear Dyn. 2023, 111, 1–25. [Google Scholar] [CrossRef]
- Ye, C.; Tan, S.; Wang, J.; Shi, L.; Zuo, Q.; Feng, W. Social Image Security with Encryption and Watermarking in Hybrid Domains. Entropy 2025, 27, 276. [Google Scholar] [CrossRef]
- Feng, W.; Yang, J.; Zhao, X.; Qin, Z.; Zhang, J.; Zhu, Z.; Wen, H.; Qian, K. A Novel Multi-Channel Image Encryption Algorithm Leveraging Pixel Reorganization and Hyperchaotic Maps. Mathematics 2024, 12, 3917. [Google Scholar] [CrossRef]
- Feng, W.; Wang, Q.; Liu, H.; Ren, Y.; Zhang, J.; Zhang, S.; Qian, K.; Wen, H. Exploiting Newly Designed Fractional-Order 3D Lorenz Chaotic System and 2D Discrete Polynomial Hyper-Chaotic Map for High-Performance Multi-Image Encryption. Fractal Fract. 2023, 7, 887. [Google Scholar] [CrossRef]
- Kocarev, L.; Jakimoski, G. Logistic map as a block encryption algorithm. Phys. Lett. A 2001, 289, 199–206. [Google Scholar] [CrossRef]
- Li, X.; Mou, J.; Banerjee, S.; Wang, Z.; Cao, Y. Design and DSP implementation of a fractional-order detuned laser hyperchaotic circuit with applications in image encryption. Chaos Solitons Fractals 2022, 159, 112133. [Google Scholar] [CrossRef]
- Yang, F.; Mou, J.; Ma, C.; Cao, Y. Dynamic analysis of an improper fractional-order laser chaotic system and its image encryption application. Opt. Lasers Eng. 2020, 129, 106031. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef]
- Zhang, J.; Xiao, X. Predicting chaotic time series using recurrent neural networks. Chinese Phys. Lett. 2000, 17, 88. [Google Scholar] [CrossRef]
- Tao, C.; Zhang, Y.; Jiang, J.J. Estimating system parameters from chaotic time series with synchronization optimized by a genetic algorithm. Phys. Rev. E 2007, 76, 016209. [Google Scholar] [CrossRef]
- Xu, X.L.; Li, G.D.; Dai, W.Y.; Song, X.M. Multi-direction chain and grid chaotic system based on julia fractal. Fractals 2021, 29, 2150264. [Google Scholar] [CrossRef]
- Abedini, M.; Vatankhah, R.; Assadian, N. Stabilizing chaotic system on periodic orbits using multi-interval and modern optimal control strategies. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3832–3842. [Google Scholar] [CrossRef]
- Mohammadi, S.; Hejazi, S.R. Using particle swarm optimization and genetic algorithms for optimal control of non-linear fractional-order chaotic system of cancer cells. Math. Comput. Simul. 2023, 206, 538–560. [Google Scholar] [CrossRef]
- Li, C.; Li, H. Robust control for a class of chaotic and hyperchaotic systems via linear state feedback. Phys. Scr. 2012, 85, 25007. [Google Scholar] [CrossRef]
- Zhou, H.L.; Song, E.B. 3-periodic point determination for quadratic polynomial mapping. J. Sichuan Univ. Nat. Sci. Ed. 2009, 46, 561–564. [Google Scholar]
- Andrecut, M.; Ali, M.K. Robust chaos in smooth unimodal maps. Phys. Rev. E 2001, 64, 025203. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters and Function Equations | Condition (i) | Condition (ii) | ||
|---|---|---|---|---|
| ν = 5.2 | ν = −5.2 | ν = 5.2 | ν = −5.2 | |
| 7.2450 | 3.2554 | −5.2450 | −1.2554 | |
| −2.5000 | 0.3261 | −2.5000 | 0.3261 | |
| 0.5408 | −0.1241 | −1.5408 | −0.8759 | |
| 1.8742 | 1.2092 | −0.2075 | 0.4574 | |
| Lyapunov exponent values | 0.7182 | 0.6930 | 0.6962 | 0.6932 |
| Indexes | Condition (i) | Condition (ii) | Logistic Map |
|---|---|---|---|
| SE | 0.9490 | 0.9501 | 0.9258 |
| Kc | 0.7568 | 0.7626 | 0.7131 |
| Kcreg | 0.7557 | 0.7622 | 0.7131 |
| KcCorr | 0.9995 | 0.9973 | 0.9991 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Chen, X.; Zhou, Z.; Li, G.; Song, X. General Construction Method and Proof for a Class of Quadratic Chaotic Mappings. Mathematics 2025, 13, 2409. https://doi.org/10.3390/math13152409
Xu W, Chen X, Zhou Z, Li G, Song X. General Construction Method and Proof for a Class of Quadratic Chaotic Mappings. Mathematics. 2025; 13(15):2409. https://doi.org/10.3390/math13152409
Chicago/Turabian StyleXu, Wenxia, Xiangkun Chen, Ziwei Zhou, Guodong Li, and Xiaoming Song. 2025. "General Construction Method and Proof for a Class of Quadratic Chaotic Mappings" Mathematics 13, no. 15: 2409. https://doi.org/10.3390/math13152409
APA StyleXu, W., Chen, X., Zhou, Z., Li, G., & Song, X. (2025). General Construction Method and Proof for a Class of Quadratic Chaotic Mappings. Mathematics, 13(15), 2409. https://doi.org/10.3390/math13152409