
High-Precision Time Delay Estimation Algorithm Based on Generalized Quadratic Cross-Correlation


Abstract
1. Introduction
2. Algorithm Design
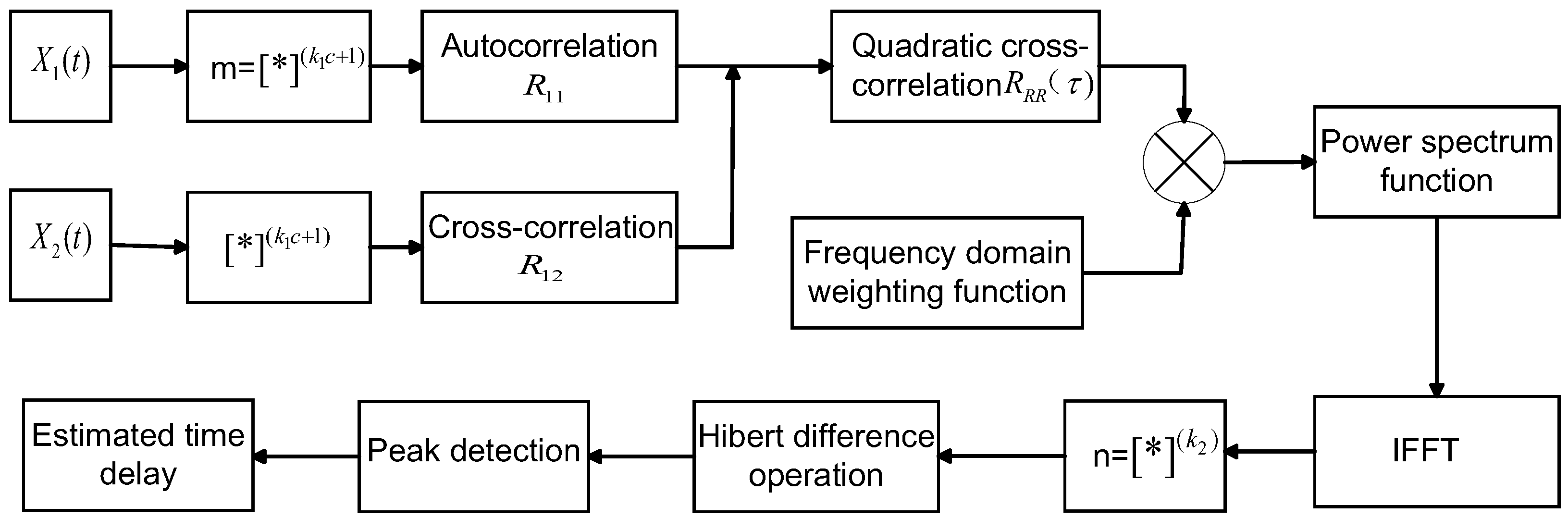
2.1. GQCC Time Delay Estimation Algorithm
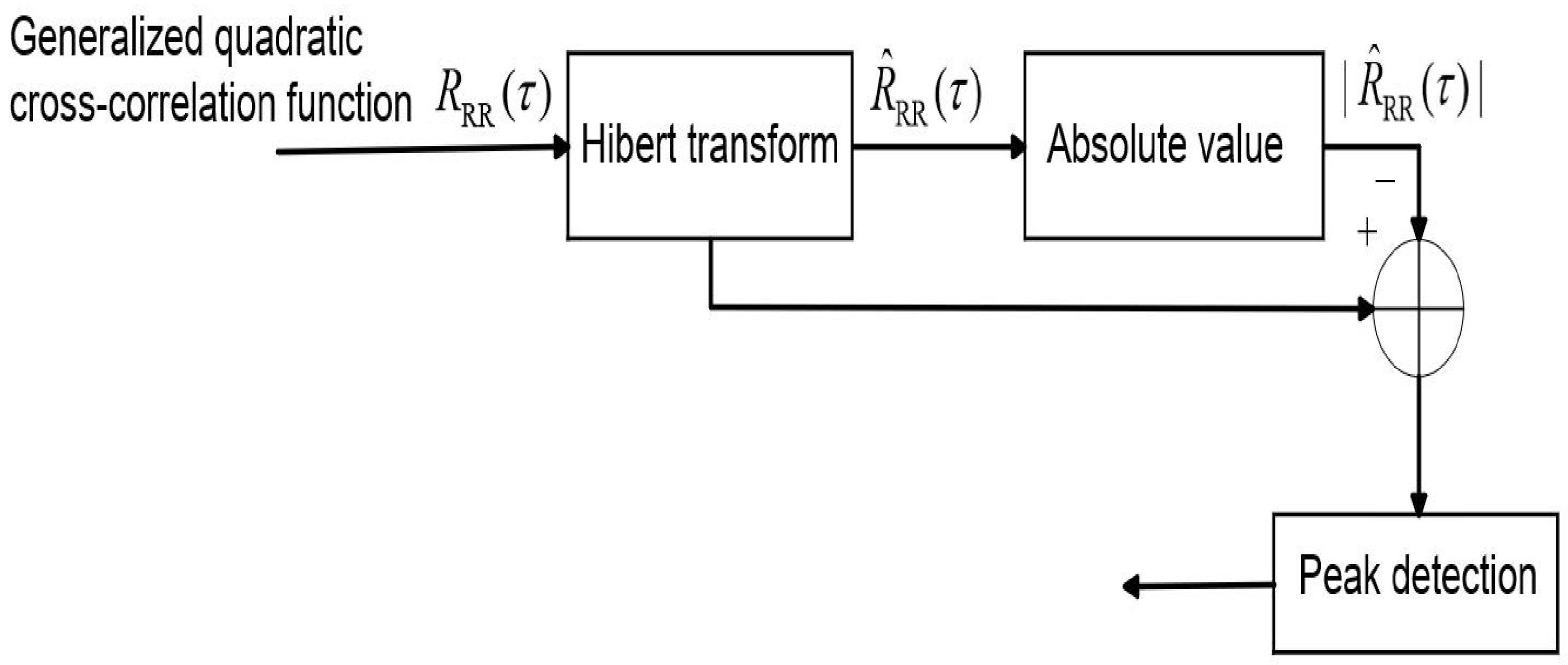
2.2. Improved GQCC Time Delay Estimation Algorithm
3. Experimental Simulation and Analysis
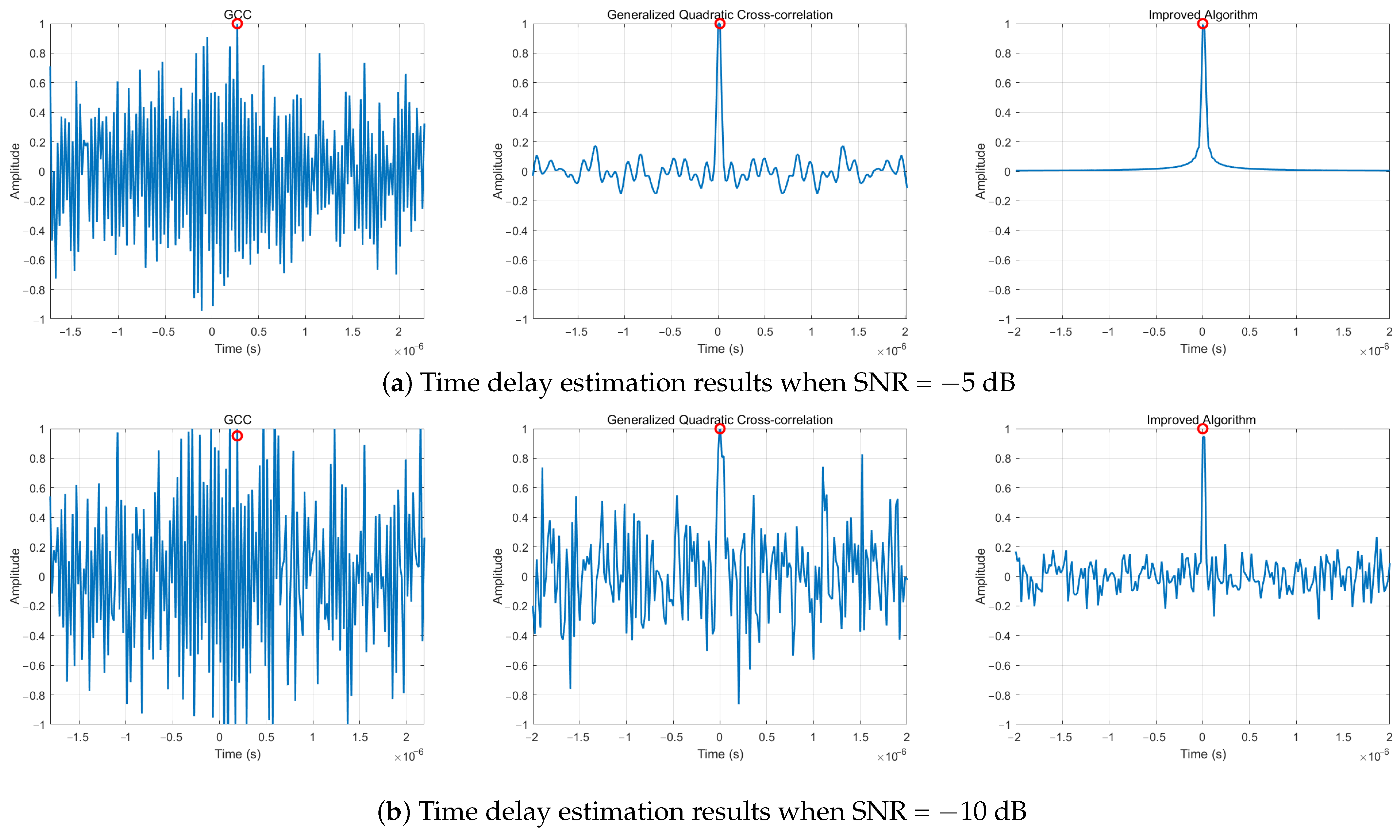
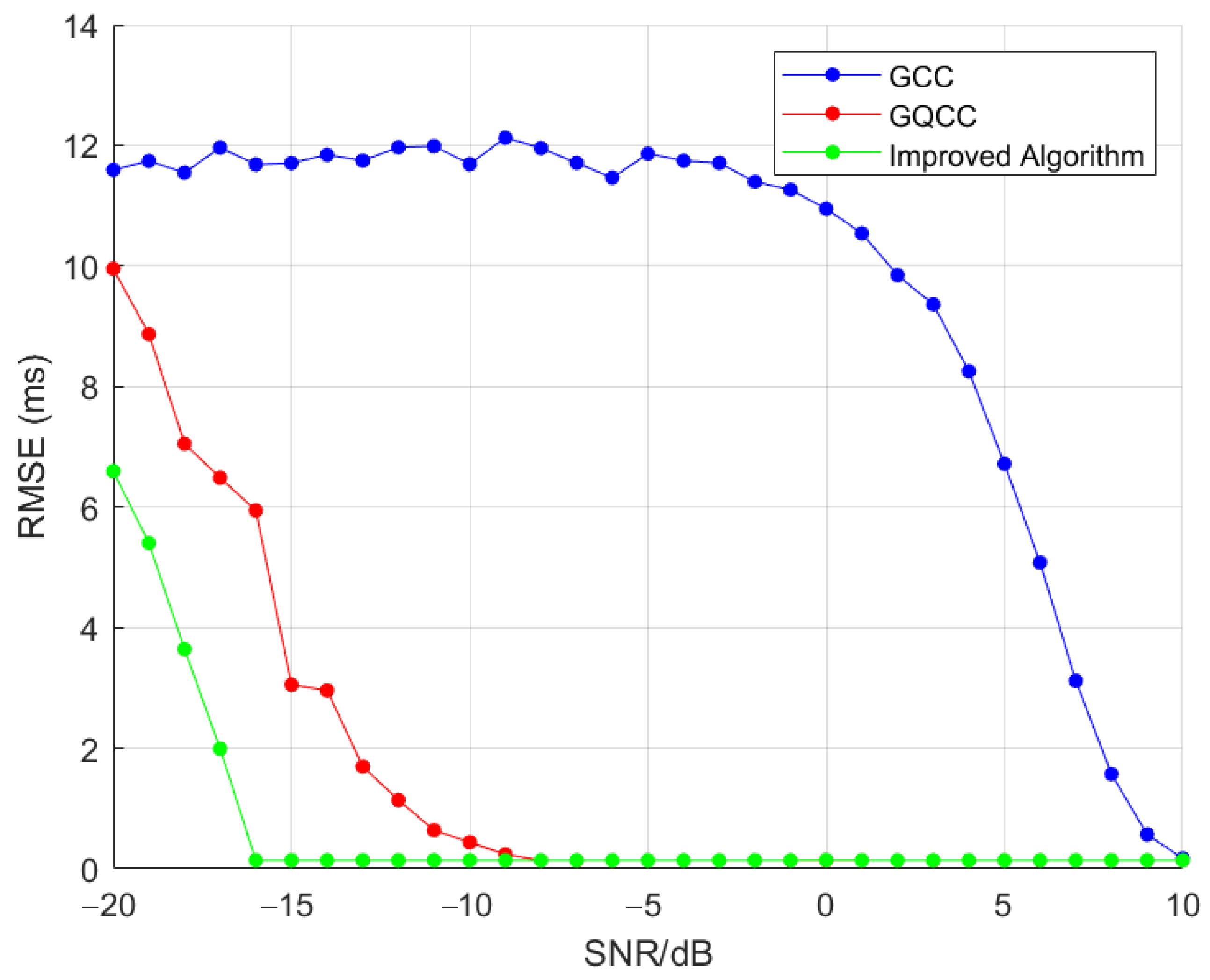
3.1. Simulation Analysis of Time Delay Estimation
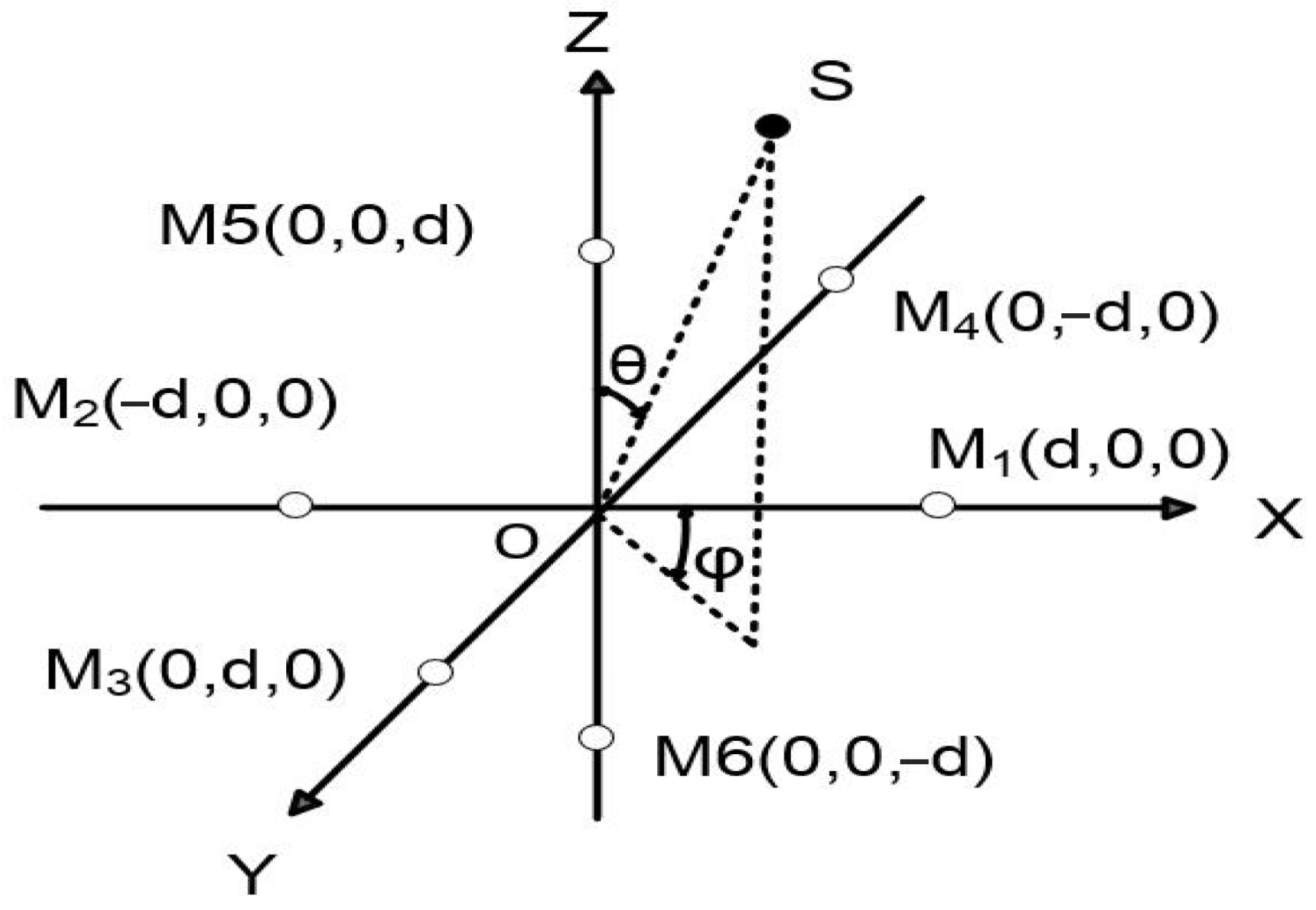
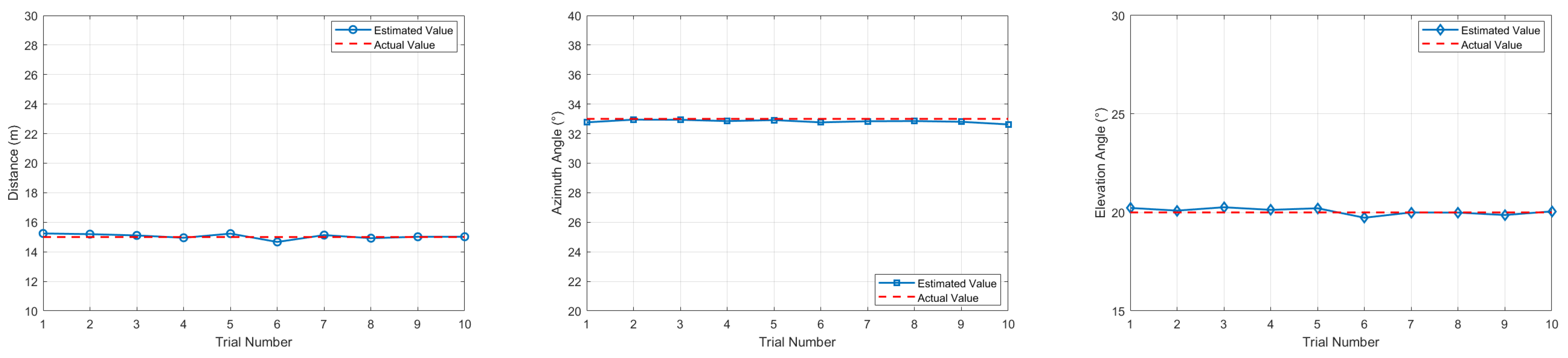
3.2. Simulation Analysis of Sound Source Localization
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, Z.; Xu, Q.; Sun, M.; Zhu, X.; Fan, S. Adaptive Kalman Filtering Localization Calibration Method Based on Dynamic Mutation Perception and Collaborative Correction. Entropy 2025, 27, 380. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Chen, P.; Chen, Z.; Xu, J. Fang-Based 3D TDOA Localization Method for Large-Scale UAV Cluster. IEEE Commun. Lett. 2024, 28, 58–62. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, G. A Multi-node Time Difference of Arrival-Positioning Method Based on Improved Time Delay Estimation. In Proceedings of the 2024 OES China Ocean Acoustics (COA), Harbin, China, 29–31 May 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Hero, A.; Schwartz, S. A new generalized cross correlator. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 38–45. [Google Scholar] [CrossRef]
- Reed, F.; Feintuch, P.; Bershad, N. Time delay estimation using the LMS adaptive filter–Static behavior. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 561–571. [Google Scholar] [CrossRef]
- Cui, X.; Gao, Y.; Ma, Y.; Liu, Y.; Jin, B. Variable Step Normalized LMS Adaptive Filter for Leak Localization in Water-Filled Plastic Pipes. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Yu, P.; Yang, C.; Wang, Z.W.; Hu, J. Generalized Secondary Correlation Delay Estimation Algorithm Based on Joint Weighting. Comput. Simul. 2023, 40, 400–404. [Google Scholar]
- Sun, C.; Li, L.; Chen, W. Quadratic Correlation Time Delay Estimation Algorithm Based on Kaiser Window and Hilbert Transform. In Proceedings of the 2016 Sixth International Conference on Instrumentation & Measurement, Computer, Communication and Control (IMCCC), Harbin, China, 21–23 July 2016; pp. 927–931. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, J.; Gao, W.; Wen, H.; Cai, G.; Jin, Y.; Wang, K. Time Delay Estimation for Acoustic Temperature Measurement of Loose Coal Based on Quadratic Correlation PHAT-β Algorithm. Fire 2024, 7, 228. [Google Scholar] [CrossRef]
- Jing, Z.; Zheng, Y.Z.; Meng, J.Y. Modified Algorithm Based on Quadratic Correlation Time Delay Estimation. Int. J. Comput. Appl. Technol. Res. 2022, 11, 82–87. [Google Scholar] [CrossRef]
- Xu, K.; Huang, A.; Wang, J.; Tao, L.; Bai, Y. Research on High-Precision Acoustic Positioning Algorithm for Small-Scale Confined Underwater Space. In Proceedings of the 2024 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Bali, Indonesia, 19–22 August 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Ashtekar, S.; Kumar, P.; P, B.K.; M, R.K. Study of Generalized Cross Correlation Techniques for Direction Finding of Wideband Signals. In Proceedings of the 2021 5th International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 8–10 April 2021; pp. 707–714. [Google Scholar] [CrossRef]
- Wang, C.; Liu, H.; Wang, Q. Time delay estimation of furnace tube leakage acoustic signal based on generalized cross correlation. In Proceedings of the 2023 42nd Chinese Control Conference (CCC), Tianjin, China, 24–26 July 2023; pp. 3460–3464. [Google Scholar] [CrossRef]
- Kai, G. Cross-Correlation Time Delay Estimation Algorithm Based on Hilbert Transform Phase Difference. In Proceedings of the 2025 5th International Conference on Sensors and Information Technology, Nanjing, China, 21–23 March 2025; pp. 106–109. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sound Source Position | Improved Algorithm | GCC Algorithm | GQCC Algorithm |
|---|---|---|---|
| (20, 30, 25) | (20.36, 29.58°, 26.50°) | (19.82, 31.25°, 24.30°) | (20.25, 30.34°, 25.83°) |
| (25, 35, 30) | (25.05, 34.98°, 30.69°) | (24.51, 36.53°, 29.14°) | (24.65, 35.57°, 30.96°) |
| (30, 28, 36) | (30.24, 27.64°, 35.24°) | (29.51, 29.20°, 33.57°) | (29.72, 28.41°, 34.54°) |
| (40, 32, 28) | (40.27, 31.97°, 27.40°) | (39.23, 33.58°, 26.09°) | (39.79, 32.52°, 27.21°) |
| (50, 40, 38) | (49.68, 39.43°, 38.08°) | (48.50, 41.22°, 36.54°) | (49.12, 40.20°, 37.23°) |
| Average Error |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Niu, Z.; Zhu, X.; Huang, Z. High-Precision Time Delay Estimation Algorithm Based on Generalized Quadratic Cross-Correlation. Mathematics 2025, 13, 2397. https://doi.org/10.3390/math13152397
Sun M, Niu Z, Zhu X, Huang Z. High-Precision Time Delay Estimation Algorithm Based on Generalized Quadratic Cross-Correlation. Mathematics. 2025; 13(15):2397. https://doi.org/10.3390/math13152397
Chicago/Turabian StyleSun, Menghao, Ziang Niu, Xuzhen Zhu, and Zijia Huang. 2025. "High-Precision Time Delay Estimation Algorithm Based on Generalized Quadratic Cross-Correlation" Mathematics 13, no. 15: 2397. https://doi.org/10.3390/math13152397
APA StyleSun, M., Niu, Z., Zhu, X., & Huang, Z. (2025). High-Precision Time Delay Estimation Algorithm Based on Generalized Quadratic Cross-Correlation. Mathematics, 13(15), 2397. https://doi.org/10.3390/math13152397