
Integrated Carbon Flow Tracing and Topology Reconfiguration for Low-Carbon Optimal Dispatch in DG-Embedded Distribution Networks


Abstract
1. Introduction
- Integrated Carbon–Electricity Framework in DN: Bridges the “electricity” and “carbon” perspectives via CEF theory for low-carbon economic DG-integrated DN reconfiguration;
- Spatiotemporal Multi-Objective Optimization Model: Addressing the limitation of single-objective optimization in balancing competing requirements, a multi-objective model for DN topology reconfiguration was constructed which could enable collaborative low-carbon and economic dispatch for DG-integrated DN systems;
- Novel Q-Learning Enhanced MFO Algorithm (QMFO): Proposed Q-learning enhanced Moth Flame Optimization with adaptive exploration for efficient, accurate solution of the complex scheduling model.
2. Energy Flow in Distribution Network
2.1. Power Flow Calculation
2.1.1. General Forward/Backward Sweep Method
- Backward Sweep (Power Summation): Starting from the leaf nodes (end nodes) and moving backwards towards the root node, calculate the power flow in each branch. For each node j (starting from end nodes):where is the total complex power flow through node i; is the load power at node i; is the set of child nodes connected to i; is the current in branch ; is the voltage at child node j; is the branch impedance and its complex form.
- Forward Sweep (Voltage Update): Starting from the root node and moving forward towards the leaf nodes, update the voltage at each node using the branch currents/powers calculated in the backward sweep. For each node j (starting from the root):where ; is the updated voltage at the child node j; is the voltage at the parent node i.
- Convergence Check: Check if the change in node voltages between consecutive iterations is below a specified tolerance:where is the voltage magnitude at node i, iteration m; is the convergence tolerance.
- Loss Calculation (Post-Processing): For each branch :where is the active power loss in branch ; is the reactive power loss in branch .
2.1.2. Processing Method for Nodes with DGs
2.2. Carbon Emission Flow Theory
3. Topology Reconfiguration via Power Loss Minimization
4. Low-Carbon Optimal Dispatch Model
4.1. Objective Function
4.2. Constraints
5. Solution Method of Low-Carbon Dispatch Model
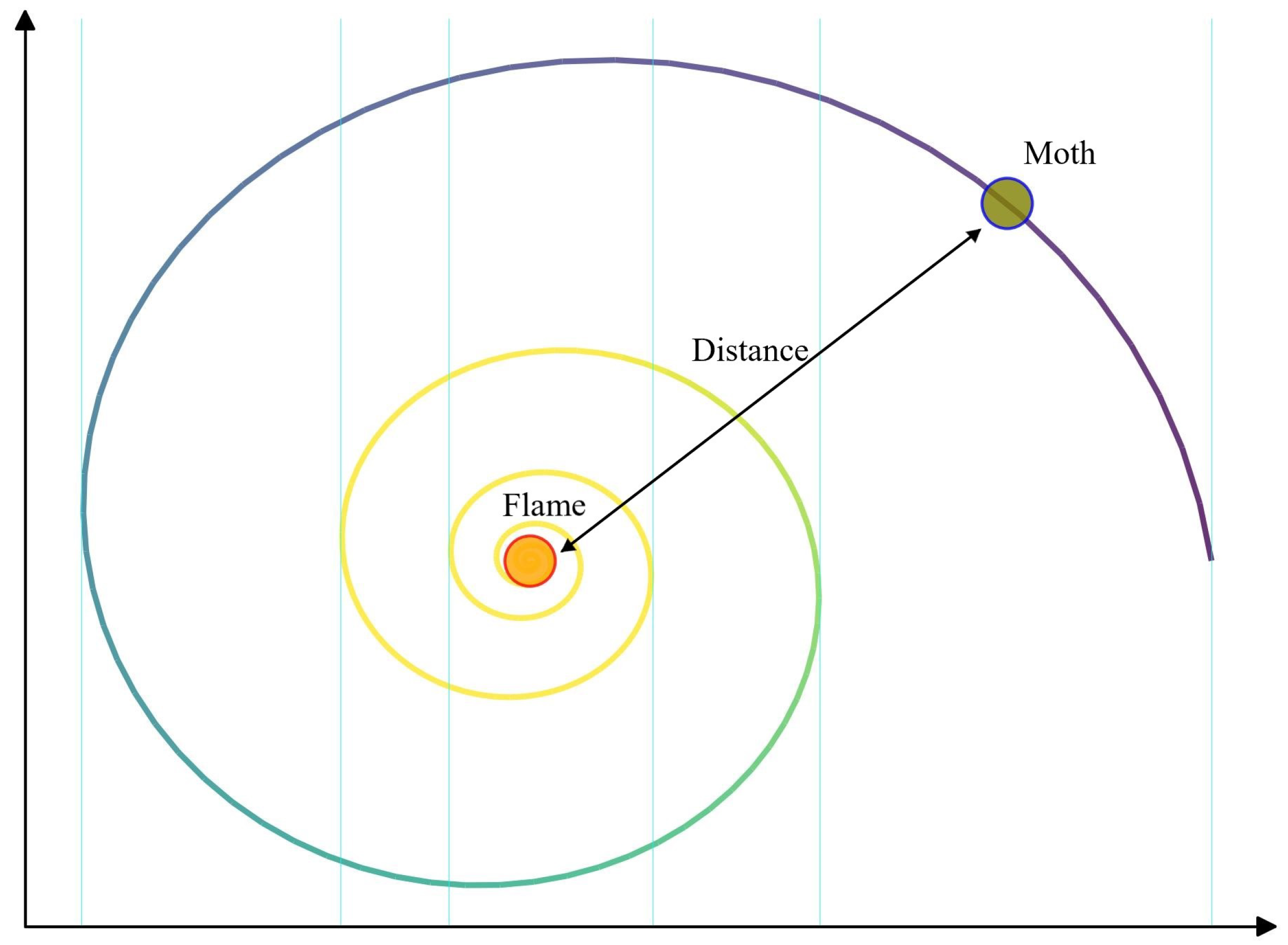
5.1. Moth Flame Optimization Algorithm
- Origin: Starts at the moth’s current position;
- Terminus: Converges at the flame position;
- Boundedness: Fluctuations constrained within the search space.
5.2. Q-Learning Algorithm for Power System Optimization
5.2.1. Markov Decision Process Components
5.2.2. Q-Value Learning Mechanism
5.2.3. Adaptive Exploration Strategy
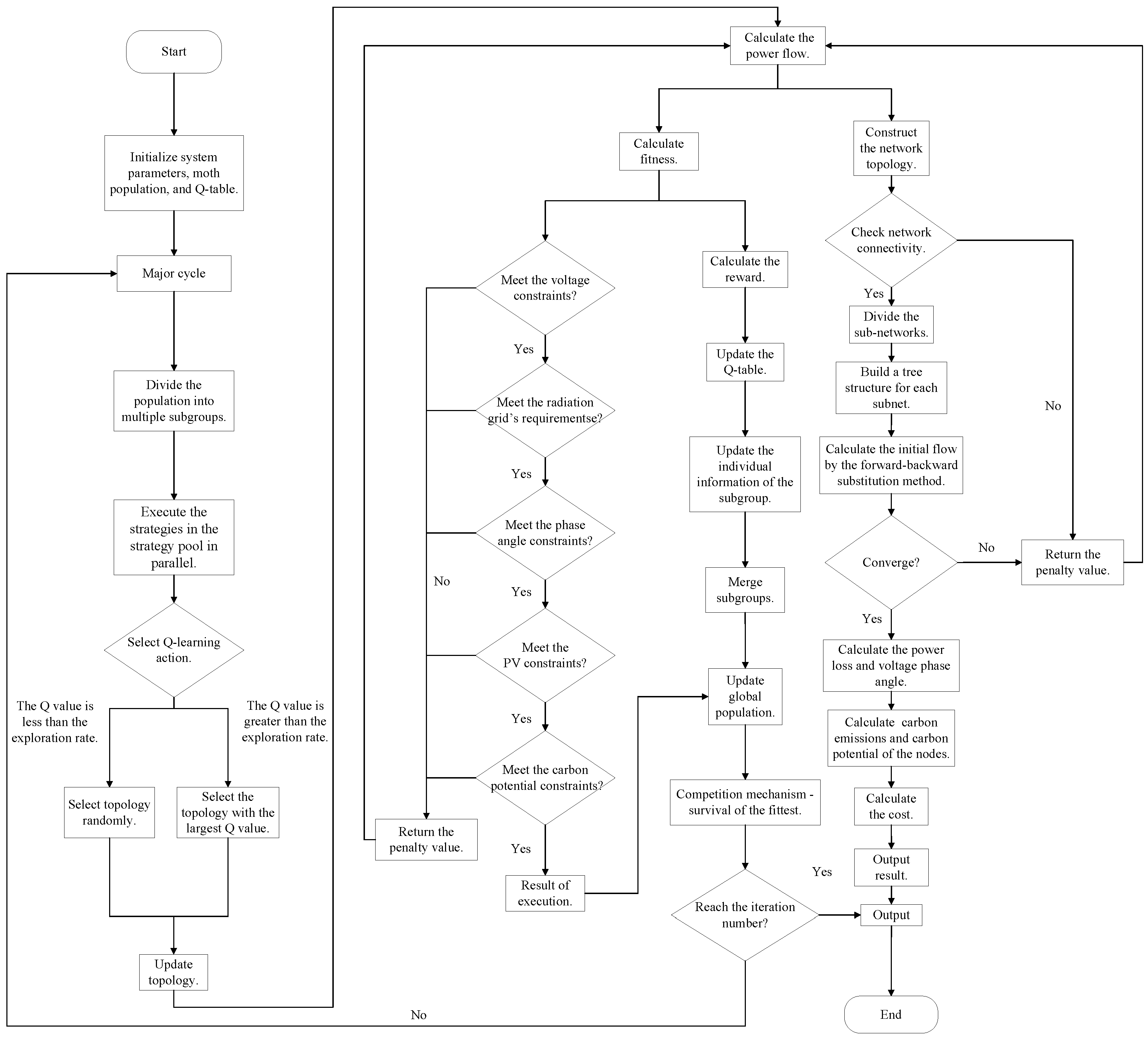
5.3. Q-Learning Enhanced Moth Flame Optimization
6. Case Study
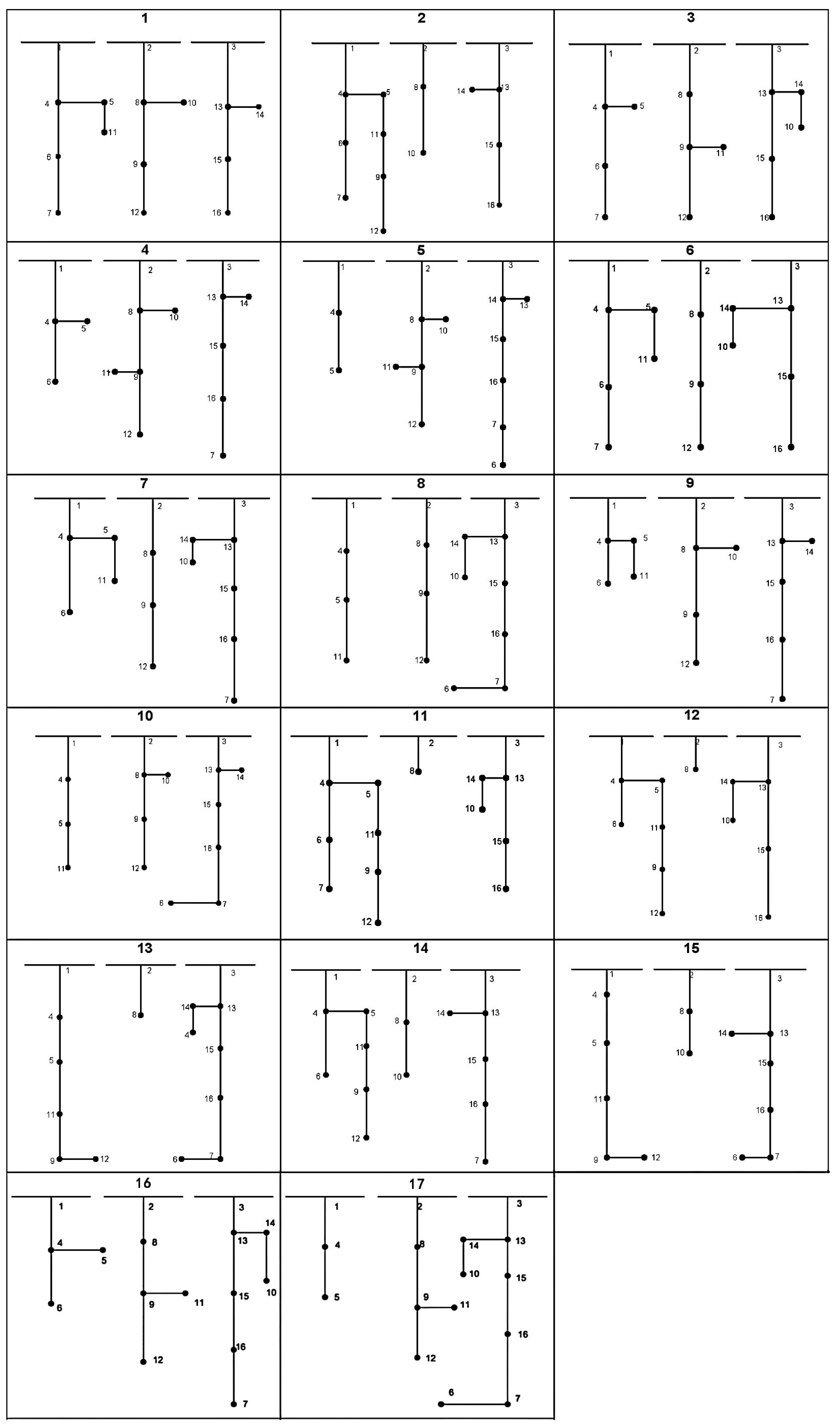
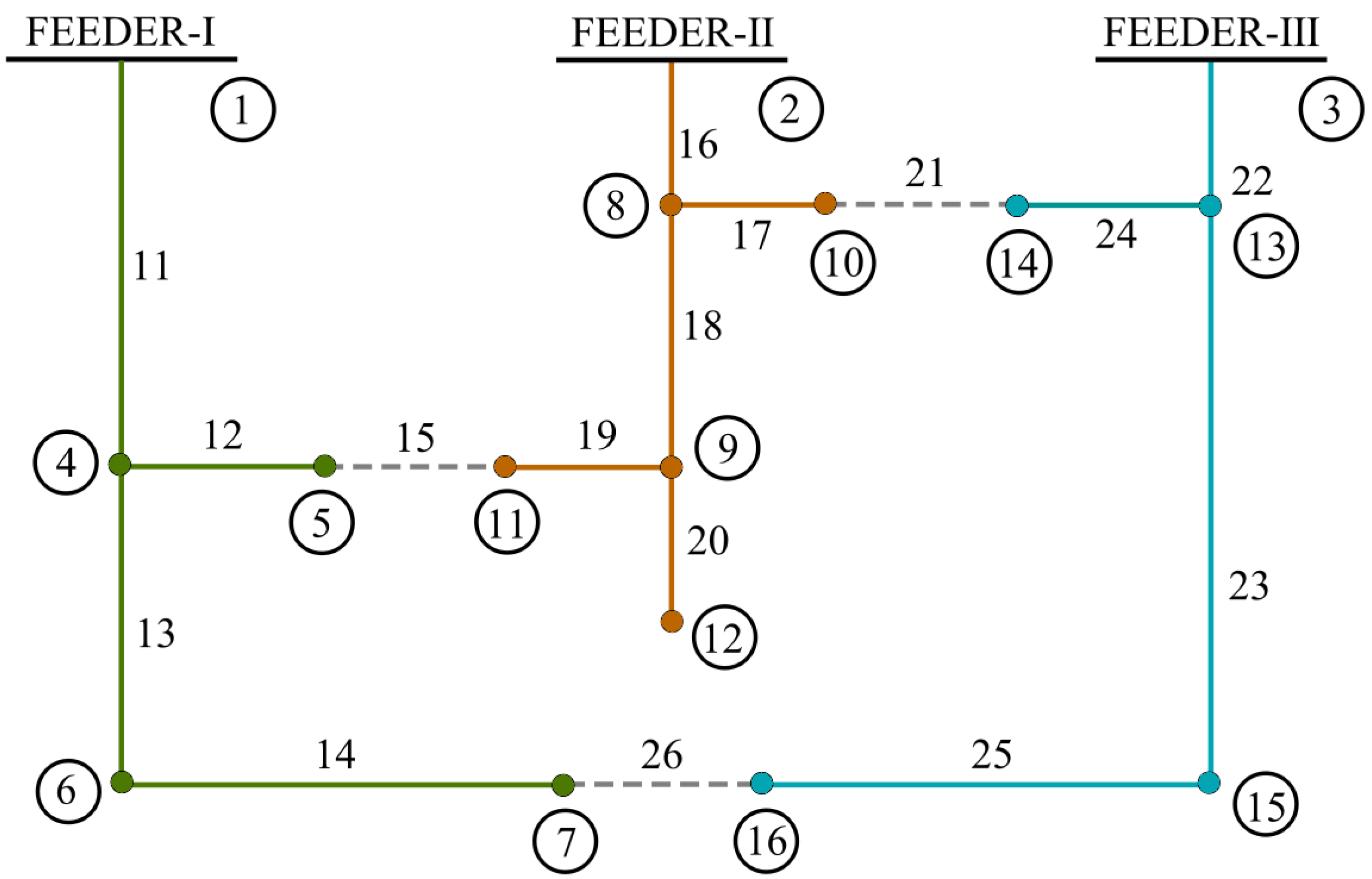
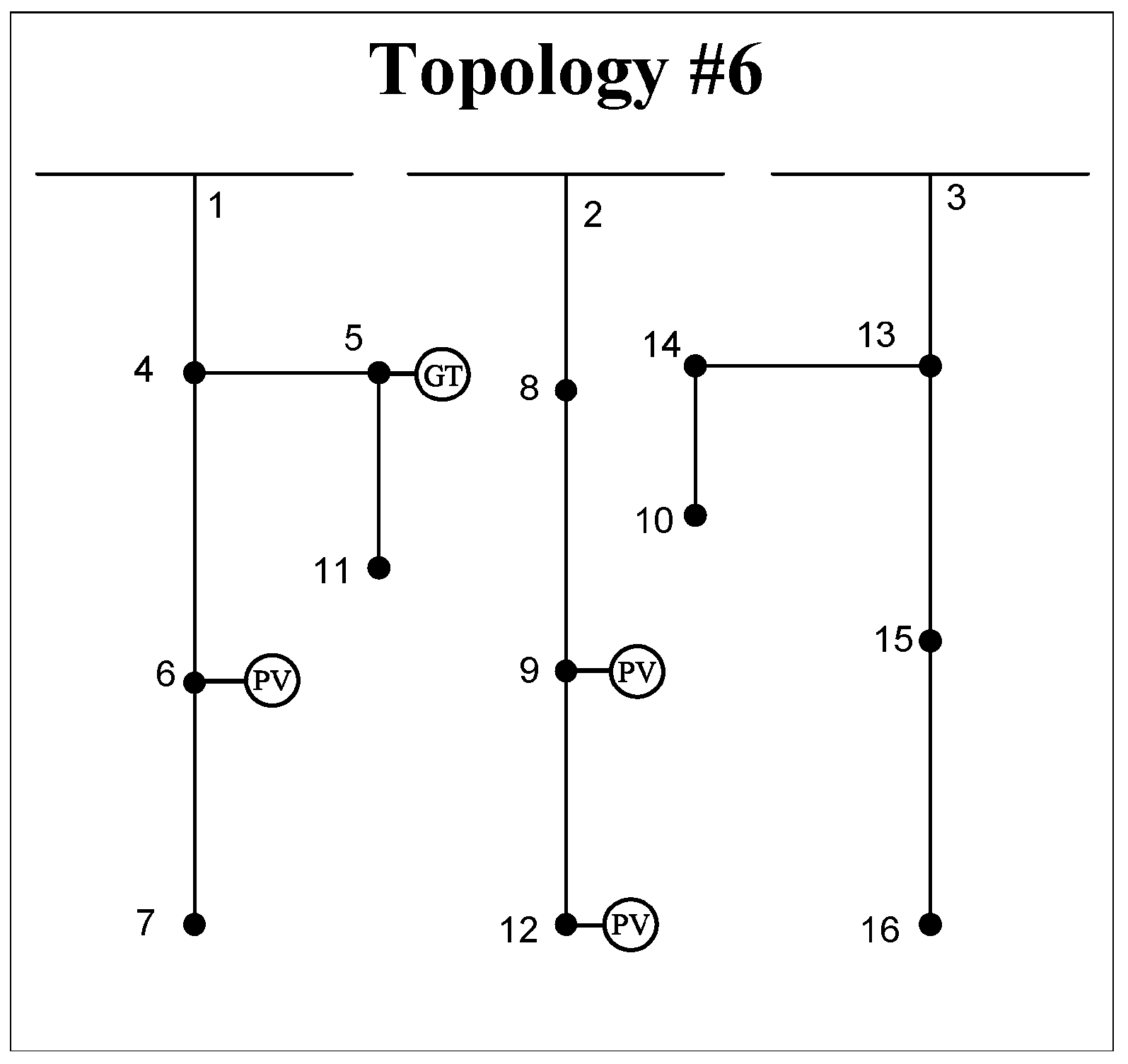
6.1. 16-Node Three-Feeder Model
- The electromotive force at Node 11 was greater than that at Node 5. In this case, the connecting switch that needed to be closed was 15. At this time, the alternative options that could conform to the were: opening the segmented Switch 16, 18 or 19, totaling three options;
- The electromotive force at Node 10 was greater than that at Node 14. In this case, the connecting switch that needed to be closed was 21. At this time, the alternative options that could conform to the were: opening the segmented switch 16 or 17, totaling two options;
- The electromotive force at Node 7 was greater than that at Node 16. In this case, the connecting switch that needed to be closed was 26. At this time, the alternative options that can conform to the were: opening the segmented Switch 11, 13 or 14, totaling three options.
6.2. Cases and Algorithms Comparison
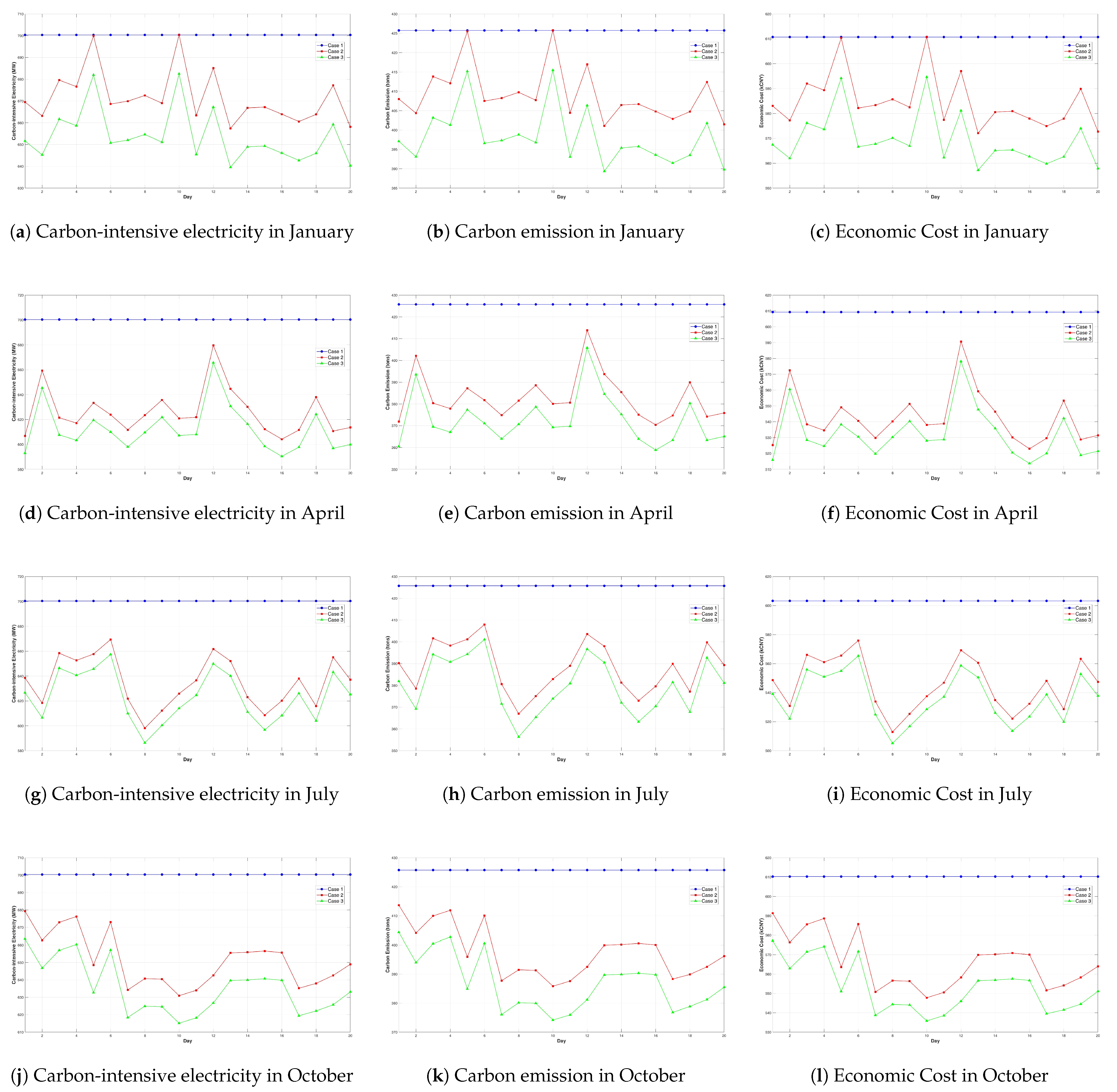
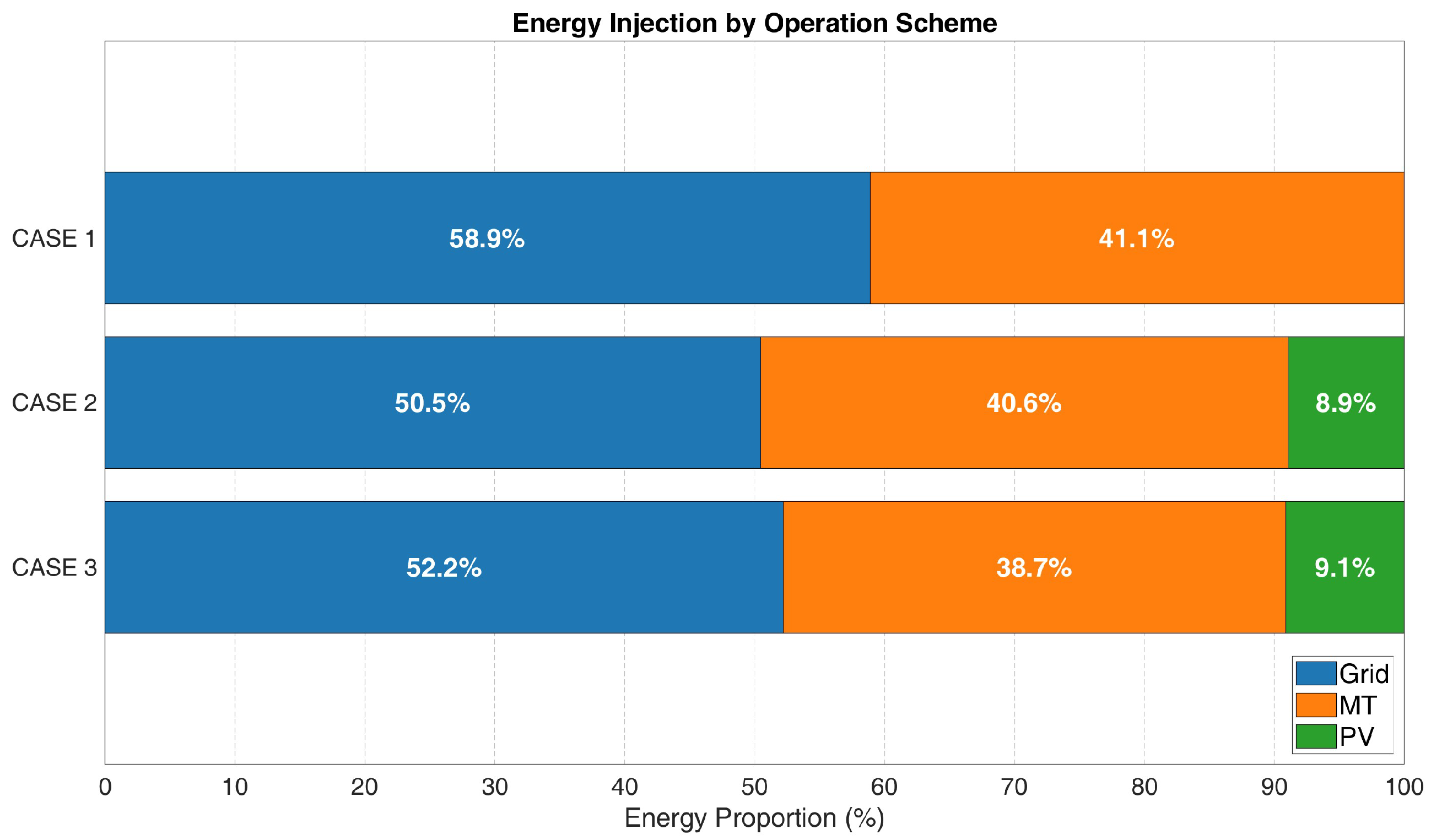
6.2.1. Cases Comparison
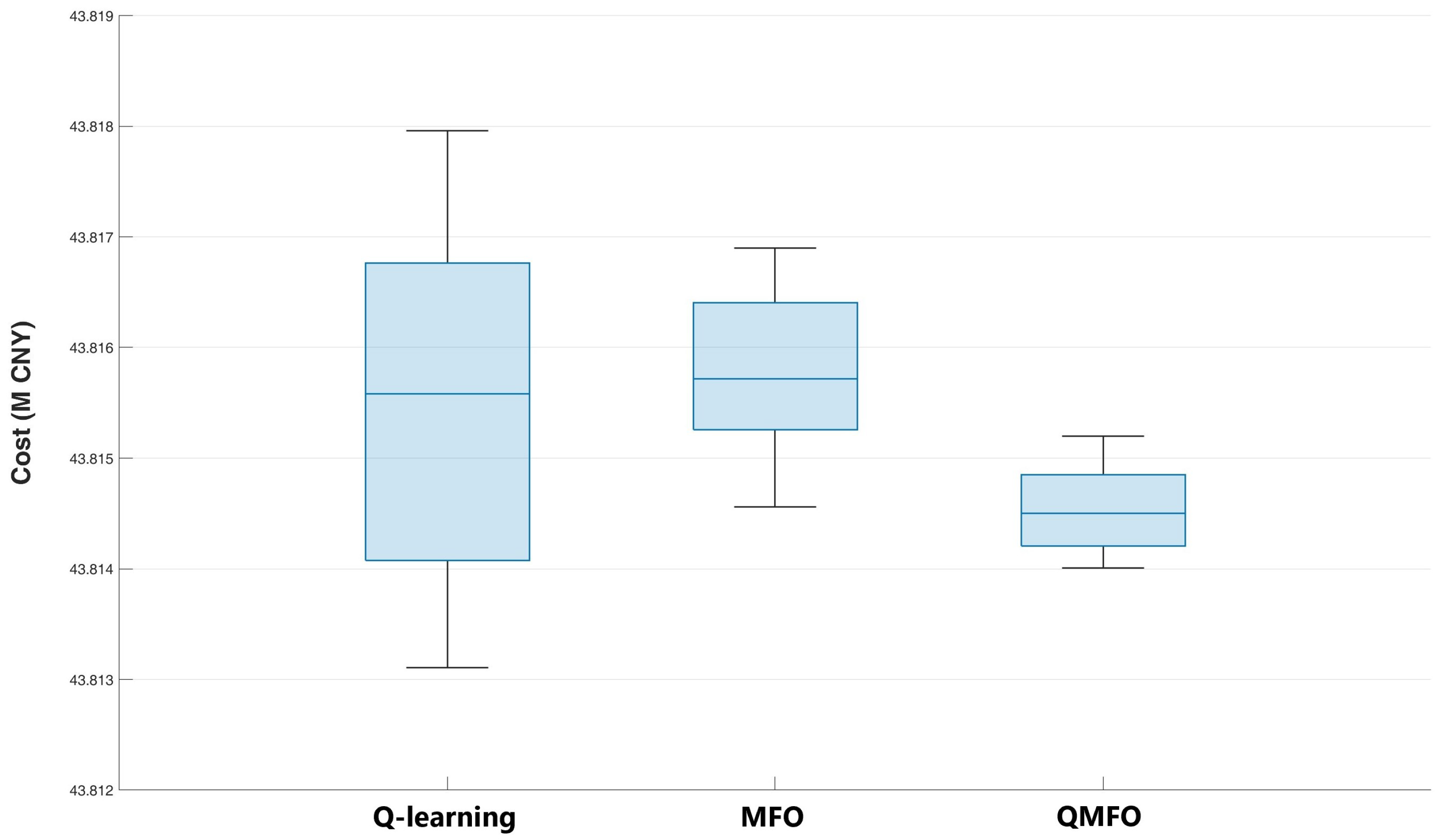
6.2.2. Algorithms Comparison
- CPU: Intel(R) Core(TM) Ultra 7 155H @3.80 GHz;
- RAM: 32 GB;
- Simulation Tool: MATLAB/Simulink R2023b;
- Power Flow Solver: Forward/Backward Sweep (FBS).
7. Conclusions
- By introducing the carbon flow theory and integrating the electricity-oriented and carbon-oriented perspectives, low carbon dispatching of the distribution network system was effectively achieved. Coupled with the distribution network reconfiguration method, low carbon operation of the distribution network was realized.
- A multi-objective DN topology reconfiguration model was constructed, which took into account both the economic efficiency and low carbon characteristics of distribution network dispatching.
- The QMFO algorithm was proposed, enabling effective solution of the proposed model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Rajaram, R.; Kumar, K.S.; Rajasekar, N. Power system reconfiguration in a radial distribution network for reducing losses and to improve voltage profile using modified plant growth simulation algorithm with Distributed Generation (DG). Energy Rep. 2015, 1, 116–122. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, L.; Lee, W.J. Robustness analysis of dynamic equivalent model of DFIG wind farm for stability study. IEEE Trans. Ind. Appl. 2018, 54, 5682–5690. [Google Scholar] [CrossRef]
- Arif, A.; Wang, Z.; Wang, J.; Mather, B.; Bashualdo, H.; Zhao, D. Load modeling—A review. IEEE Trans. Smart Grid 2017, 9, 5986–5999. [Google Scholar] [CrossRef]
- Chaspierre, G.; Denis, G.; Panciatici, P.; Van Cutsem, T. An active distribution network equivalent derived from large-disturbance simulations with uncertainty. IEEE Trans. Smart Grid 2020, 11, 4749–4759. [Google Scholar] [CrossRef]
- Alhulayil, M.; López-Benítez, M.; Alammar, M.; Al Ayidh, A. Towards Fair Spectrum Sharing: An Enhanced Fixed Waiting Time Model for LAA and Wi-Fi Networks Coexistence. IEEE Access 2025, 13, 73735–73744. [Google Scholar] [CrossRef]
- Leghari, Z.H.; Kumar, M.; Shaikh, P.H.; Kumar, L.; Tran, Q.T. A critical review of optimization strategies for simultaneous integration of distributed generation and capacitor banks in power distribution networks. Energies 2022, 15, 8258. [Google Scholar] [CrossRef]
- Chen, S.; Sun, B.; He, Z.; Wu, Z. Calculation method of carbon emission flow in power system based on the theory of power flow calculation. In Proceedings of the 2015 6th International Conference on Manufacturing Science and Engineering, Guangzhou, China, 28–29 November 2015; Atlantis Press: Dordrecht, The Netherlands, 2015; pp. 443–450. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, J. Peer-to-peer Energy-carbon Management Method of Multiple Integrated Energy Systems Considering Multi-agent Interaction Strategy. J. Syst. Simul. 2024, 36, 2488–2502. [Google Scholar] [CrossRef]
- Kang, C.; Zhou, T.; Chen, Q.; Wang, J.; Sun, Y.; Xia, Q.; Yan, H. Carbon emission flow from generation to demand: A network-based model. IEEE Trans. Smart Grid 2015, 6, 2386–2394. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Z.; Wen, B.; Zhang, X.; Wen, M.; Huang, H.; Yu, Z.; Liu, Y. Modeling and analysis method for carbon emission flow in integrated energy systems considering energy quality. Energy Sci. Eng. 2024, 12, 2405–2425. [Google Scholar] [CrossRef]
- Peng, C.; Xu, L.; Gong, X.; Sun, H.; Pan, L. Molecular evolution based dynamic reconfiguration of distribution networks with DGs considering three-phase balance and switching times. IEEE Trans. Ind. Inform. 2018, 15, 1866–1876. [Google Scholar] [CrossRef]
- Wang, H.J.; Pan, J.S.; Nguyen, T.T.; Weng, S. Distribution network reconfiguration with distributed generation based on parallel slime mould algorithm. Energy 2022, 244, 123011. [Google Scholar] [CrossRef]
- Li, Z.; Wang, S.; Zhou, Y.; Liu, W.; Zheng, X. Optimal distribution systems operation in the presence of wind power by coordinating network reconfiguration and demand response. Int. J. Electr. Power Energy Syst. 2020, 119, 105911. [Google Scholar] [CrossRef]
- Wagle, R.; Sharma, P.; Sharma, C.; Amin, M.; Rueda, J.L.; Gonzalez-Longatt, F. Optimal power flow-based reactive power control in smart distribution network using real-time cyber-physical co-simulation framework. IET Gener. Transm. Distrib. 2023, 17, 4489–4502. [Google Scholar] [CrossRef]
- Liu, Z.; Xing, H.; Luo, Y.; Ye, Y.; Shi, Y. Low-carbon economic dispatch of an integrated energy system based on carbon emission flow theory. J. Electr. Eng. Technol. 2023, 18, 1613–1624. [Google Scholar] [CrossRef]
- Feng, J.; Nan, J.; Wang, C.; Sun, K.; Deng, X.; Zhou, H. Source-load coordinated low-carbon economic dispatch of electric-gas integrated energy system based on carbon emission flow theory. Energies 2022, 15, 3641. [Google Scholar] [CrossRef]
- Yu, F.; Chu, X.; Sun, D.; Liu, X. Low-carbon economic dispatch strategy for renewable integrated power system incorporating carbon capture and storage technology. Energy Rep. 2022, 8, 251–258. [Google Scholar] [CrossRef]
- Yang, C.; Sun, Y.; Zou, Y.; Zheng, F.; Liu, S.; Zhao, B.; Wu, M.; Cui, H. Optimal power flow in distribution network: A review on problem formulation and optimization methods. Energies 2023, 16, 5974. [Google Scholar] [CrossRef]
- Tahir, Y.; Khan, M.F.N.; Sajjad, I.A.; Martirano, L. Optimal control of active distribution network using deep reinforcement learning. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June–1 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Raul, V.; Jakson, P.; Raoni, F. Electric distribution network reconfiguration optimized for PV distributed generation and energy storage. Electr. Power Syst. Res. 2020, 184, 106319. [Google Scholar] [CrossRef]
- Yang, T.; Guo, Y.; Deng, L.; Sun, H.; Wu, W. A linear branch flow model for radial distribution networks and its application to reactive power optimization and network reconfiguration. IEEE Trans. Smart Grid 2020, 12, 2027–2036. [Google Scholar] [CrossRef]
- Wagle, R.; Sharma, P.; Sharma, C.; Amin, M. Optimal power flow based coordinated reactive and active power control to mitigate voltage violations in smart inverter enriched distribution network. Int. J. Green Energy 2024, 21, 359–375. [Google Scholar] [CrossRef]
- Zhao, J.; Fan, X.; Lin, C.; Wei, W. Distributed continuation power flow method for integrated transmission and active distribution network. J. Mod. Power Syst. Clean Energy 2015, 3, 573–582. [Google Scholar] [CrossRef]
- Valinejad, J.; Marzband, M.; Korkali, M.; Xu, Y.; Al-Sumaiti, A.S. Coalition formation of microgrids with distributed energy resources and energy storage in energy market. J. Mod. Power Syst. Clean Energy 2020, 8, 906–918. [Google Scholar] [CrossRef]
- Azizivahed, A.; Arefi, A.; Ghavidel, S.; Shafie-Khah, M.; Li, L.; Zhang, J.; Catalão, J.P. Energy management strategy in dynamic distribution network reconfiguration considering renewable energy resources and storage. IEEE Trans. Sustain. Energy 2019, 11, 662–673. [Google Scholar] [CrossRef]
- Chang, G.W.; Chu, S.Y.; Wang, H.L. A Simplified Forward and Backward Sweep Approach for Distribution System Load Flow Analysis. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Zhou, M.M.; Zhang, M.S.; Tao, J.; Wu, X.; Zhang, H.Y. Research on Power Flow Algorithm of Distribution Network with Distributed Generation. In Proceedings of the 17th Annual Conference of China Electrotechnical Society, Beijing, China, 17–18 September 2023; pp. 38–45. [Google Scholar] [CrossRef]
- Kang, C.; Zhou, T.; Chen, Q. Carbon Emission Flow in Networks. Sci. Rep. 2012, 2, 479. [Google Scholar] [CrossRef] [PubMed]
- Civanlar, S.; Grainger, J.; Yin, H.; Lee, S. Distribution feeder reconfiguration for loss reduction. IEEE Trans. Power Deliv. 1988, 3, 1217–1223. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Clifton, J.; Laber, E. Q-Learning: Theory and Applications. Annu. Rev. Stat. Its Appl. 2020, 7, 279–301. [Google Scholar] [CrossRef]
- Wang, C.; Lei, S.; Ju, P.; Chen, C.; Peng, C.; Hou, Y. MDP-Based Distribution Network Reconfiguration With Renewable Distributed Generation: Approximate Dynamic Programming Approach. IEEE Trans. Smart Grid 2020, 11, 3620–3631. [Google Scholar] [CrossRef]
- Hu, C.; Xu, M. Adaptive Exploration Strategy With Multi-Attribute Decision-Making for Reinforcement Learning. IEEE Access 2020, 8, 32353–32364. [Google Scholar] [CrossRef]
- Ting Li, Y.L. A Novel Path Planning Algorithm Based on Q-learning and Adaptive Exploration Strategy. In Proceedings of the 2019 Scientific Conference on Network, Power Systems and Computing, Guilin, China, 16–17 November 2019; pp. 105–108. [Google Scholar] [CrossRef]
- Singh, S.; Raju, G.; Rao, G.; Afsari, M. A heuristic method for feeder reconfiguration and service restoration in distribution networks. Int. J. Electr. Power Energy Syst. 2009, 31, 309–314. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gas Turbine | PV | Topology Reconfiguration | |
|---|---|---|---|
| Case 1 | Yes | No | No |
| Case 2 | Yes | Yes | No |
| Case 3 | Yes | Yes | Yes |
| Power Loss (MW) | Carbon Emission (Tons) CO2 | Cost (M CNY) | |
|---|---|---|---|
| Case 1 | 924.646 | 34,059.671 | 48.670 |
| Case 2 | 772.907 | 31,558.541 | 44.781 |
| Case 3 | 463.733 | 30,758.782 | 43.815 |
| Parameter | Q-Learning | MFO | QMFO |
|---|---|---|---|
| Population | - | 50 | 50 |
| Subpopulation | - | 3 | 3 |
| Penalty factor | 1 × 108 | 1 × 108 | 1 × 108 |
| Learning rate | 0.7 | - | 0.7 |
| 0.5 | - | 0.5 | |
| 0.1 | - | 0.1 | |
| Max iterations (per unit hour) | 20 | 20 | 20 |
| Algorithm | Avg. Time (s) (Per Unit Hour) | Avg. Convergence Iterations (Per Unit Hour) | Avg. Cost (M CNY) | Standard Deviation | Min Cost | Max Cost |
|---|---|---|---|---|---|---|
| Q-learning | 1.413 | 7.821 | 43.8155 | 1.5 × 10−3 | 43.8134 | 43.8180 |
| MFO | 1.71 | 2.741 | 43.8157 | 7.2 × 10−4 | 43.8146 | 43.8169 |
| QMFO | 1.165 | 1.535 | 43.8146 | 3.7 × 10−4 | 43.8138 | 43.8152 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, R.; Xia, G.; Hu, S.; Zhang, Y.; Li, H.; Shi, J. Integrated Carbon Flow Tracing and Topology Reconfiguration for Low-Carbon Optimal Dispatch in DG-Embedded Distribution Networks. Mathematics 2025, 13, 2395. https://doi.org/10.3390/math13152395
Fu R, Xia G, Hu S, Zhang Y, Li H, Shi J. Integrated Carbon Flow Tracing and Topology Reconfiguration for Low-Carbon Optimal Dispatch in DG-Embedded Distribution Networks. Mathematics. 2025; 13(15):2395. https://doi.org/10.3390/math13152395
Chicago/Turabian StyleFu, Rao, Guofeng Xia, Sining Hu, Yuhao Zhang, Handaoyuan Li, and Jiachuan Shi. 2025. "Integrated Carbon Flow Tracing and Topology Reconfiguration for Low-Carbon Optimal Dispatch in DG-Embedded Distribution Networks" Mathematics 13, no. 15: 2395. https://doi.org/10.3390/math13152395
APA StyleFu, R., Xia, G., Hu, S., Zhang, Y., Li, H., & Shi, J. (2025). Integrated Carbon Flow Tracing and Topology Reconfiguration for Low-Carbon Optimal Dispatch in DG-Embedded Distribution Networks. Mathematics, 13(15), 2395. https://doi.org/10.3390/math13152395