
Composite Continuous High-Order Nonsingular Terminal Sliding Mode Control for Flying Wing UAVs with Disturbances and Actuator Faults


Abstract
1. Introduction
2. Model Description and Problem Formulation
2.1. Longitudinal Dynamics of Flying Wing UAVs
2.2. Problem Formulation
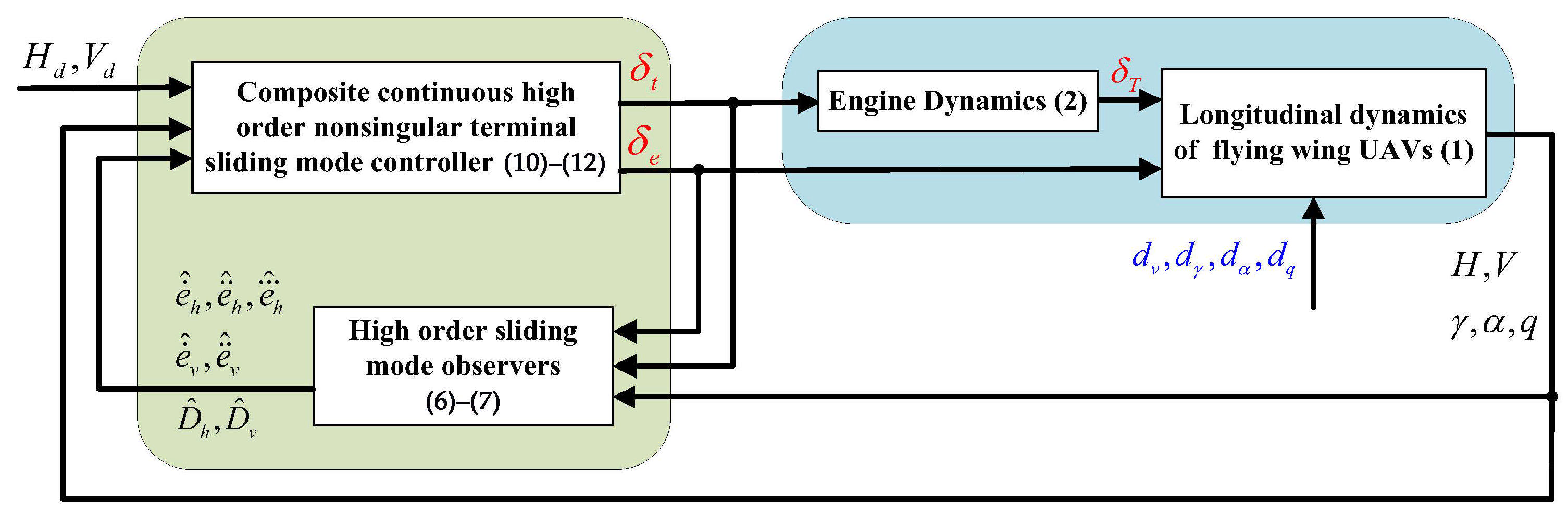
3. Controller Design
3.1. Design of HSMOs
3.2. Design of CNTSMC
4. Stability Analysis
- (1)
- Finite-time convergence of the sliding variable
- (2)
- Finite-time boundness of system states
- (3)
- Finite-time convergence of tracking error
5. Simulation Study
5.1. Simulation Scenario Setting
- (1)
- When s, the engine throttle begins to suffer 20% efficiency loss;
- (2)
- When s, the elevator begins to suffer 20% efficiency loss.
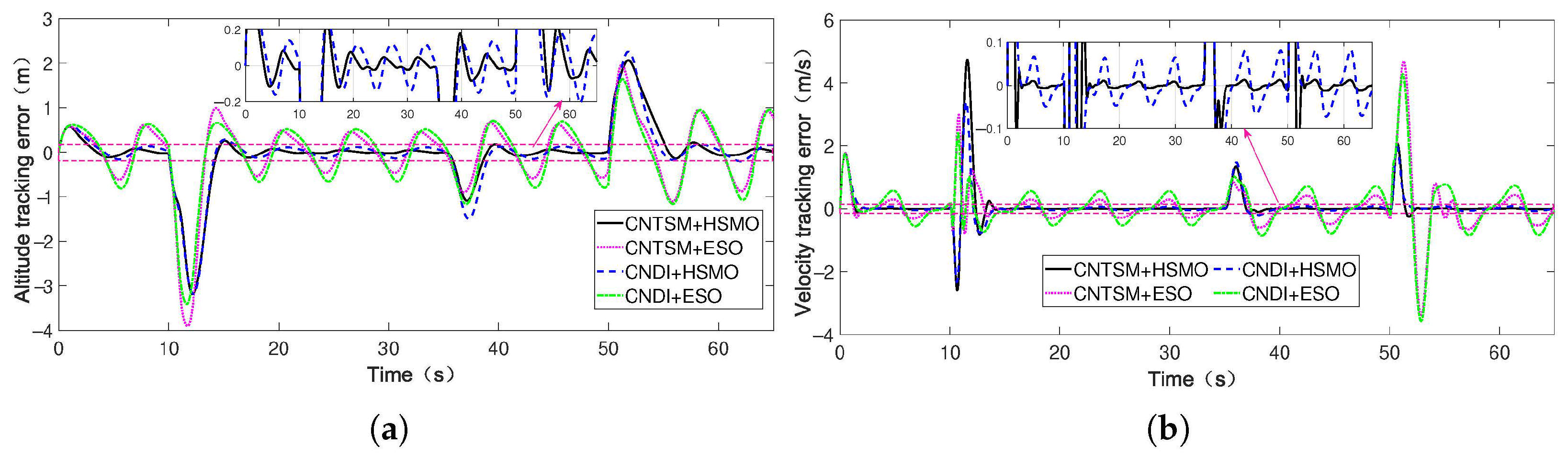
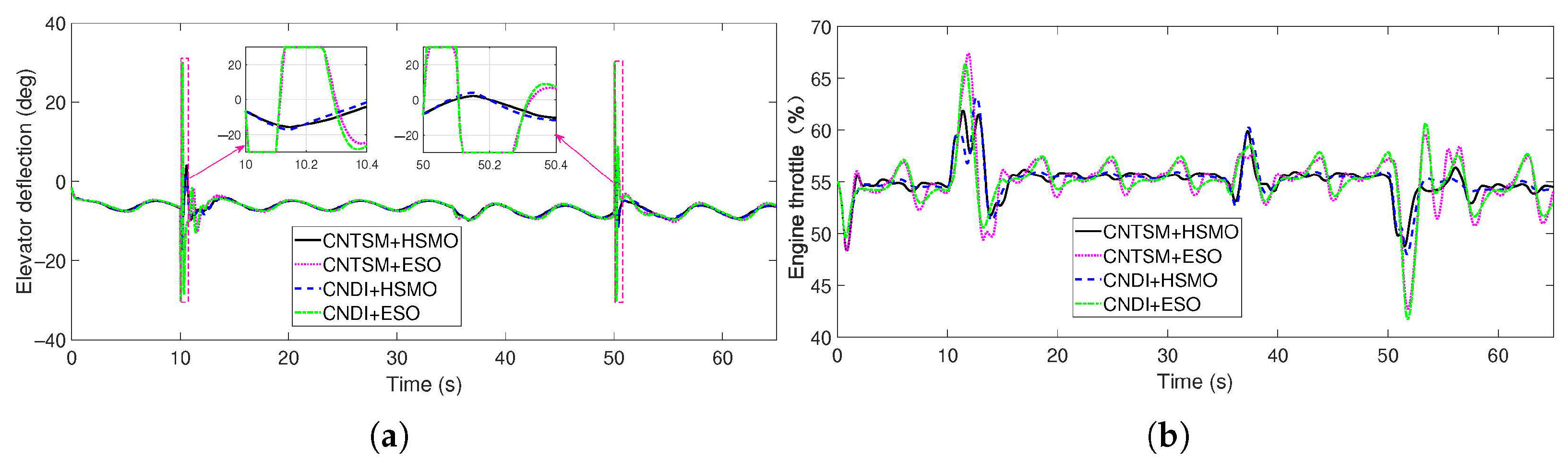
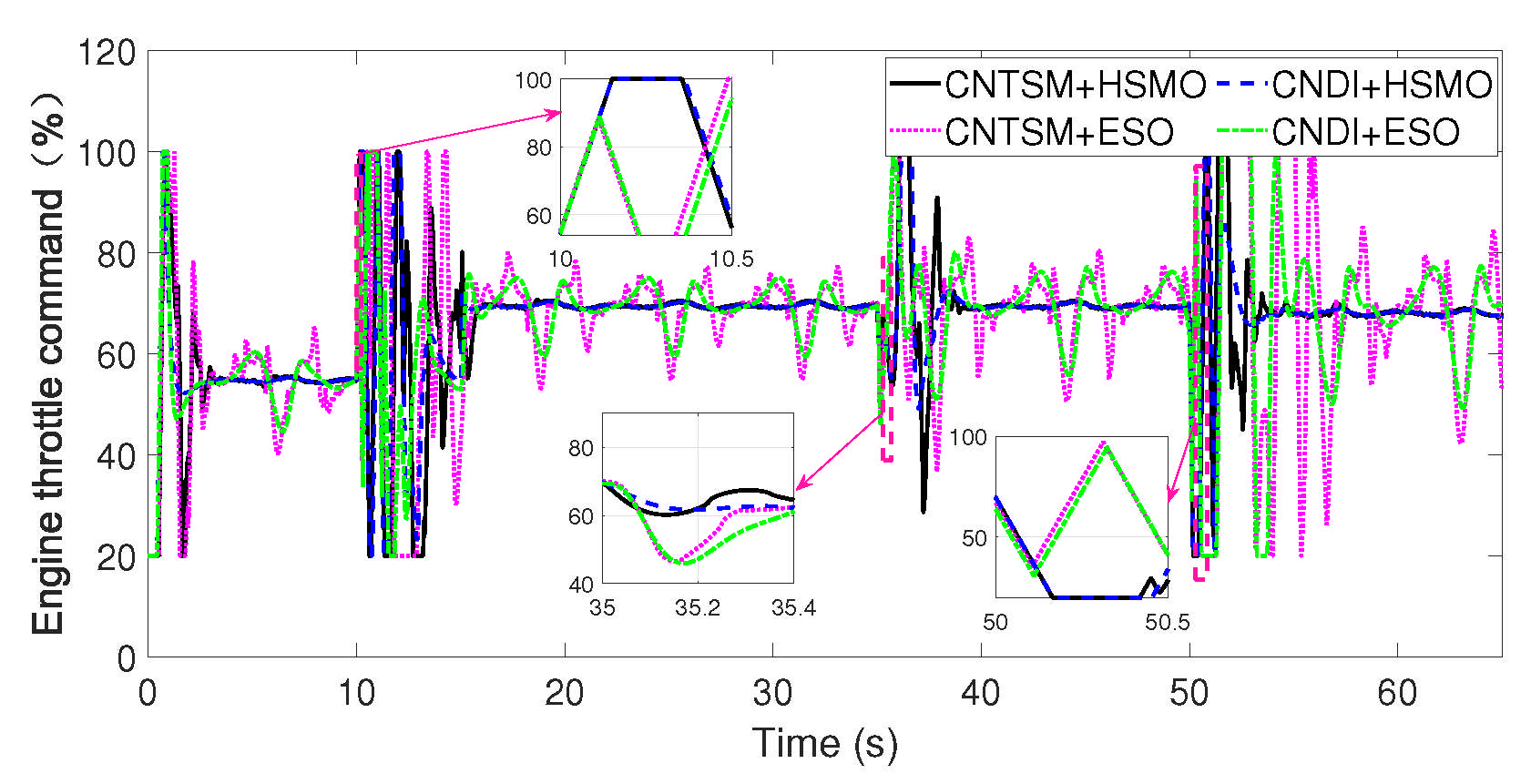
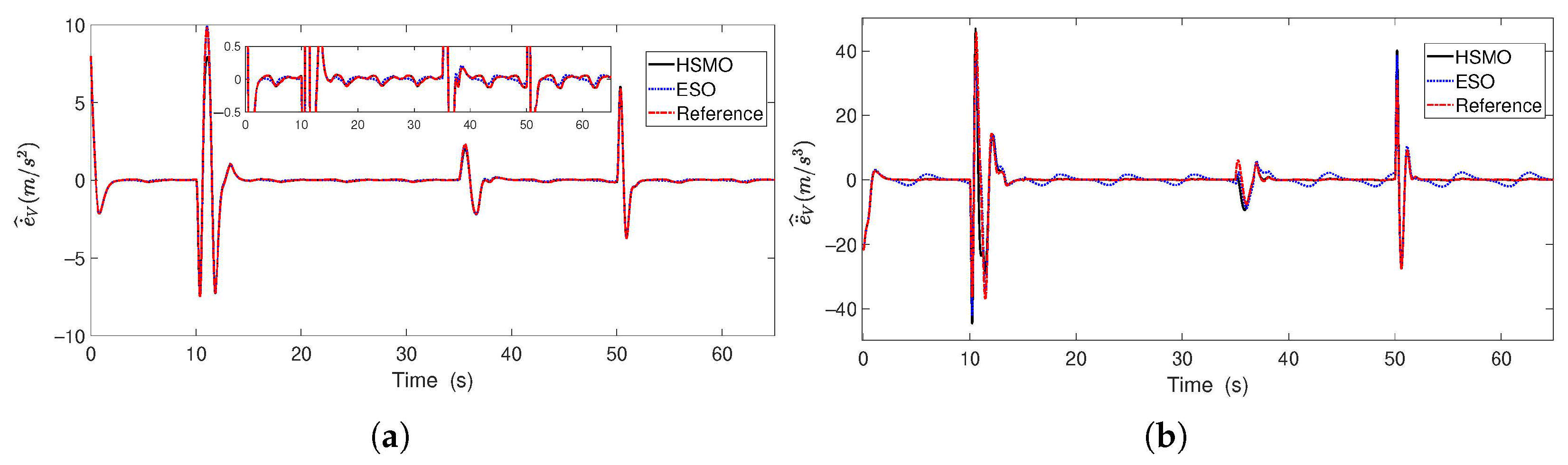
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Xu, X.; Zhou, Z. Study on longitudinal stability improvement of flying wing aircraft based on synthetic jet flow control. Aerosp. Sci. Technol. 2015, 46, 287–298. [Google Scholar] [CrossRef]
- Wu, W.; Wang, Y.; Gong, C.; Ma, D. Path following control for miniature fixed-wing unmanned aerial vehicles under uncertainties and disturbances a two-layered framework. Nonlinear Dyn. 2022, 108, 3761–3781. [Google Scholar] [CrossRef]
- Zhao, Z.; Cao, D.; Yang, J.; Wang, H. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics. Nonlinear Dyn. 2020, 102, 2583–2596. [Google Scholar] [CrossRef]
- Qu, X.; Zhang, W.; Shi, J.; Lyu, Y. A novel yaw control method for flying wing aircraft in low velocity regime. Aerosp. Sci. Technol. 2017, 69, 636–649. [Google Scholar] [CrossRef]
- Zhang, S.; Meng, Q. An anti-windup INDI fault-tolerant control scheme for flying wing aircraft with actuator faults. ISA Trans. 2019, 93, 172–179. [Google Scholar] [CrossRef]
- Li, J.-G.; Chen, X.; Li, Y.-J.; Zhang, R. Control system design of flying wing UAV based on nonlinear methodology. Def. Technol. 2017, 13, 397–405. [Google Scholar] [CrossRef]
- Wang, X.; Sun, S.; Tao, C.; Xu, B. Neural sliding mode control of low-altitude flying UAV considering wave effect. Comput. Electr. Eng. 2017, 96, 107505. [Google Scholar] [CrossRef]
- Mei, K.; Ding, S.; Yu, X. A generalized supertwisting algorithm. IEEE Trans. Syst. Man Cybern Cybern. 2022, 53, 3951–3960. [Google Scholar] [CrossRef]
- Ding, S.; Zhang, B.; Mei, K.; Park, J.H. Adaptive fuzzy SOSM controller design with output constraints. IEEE Trans. Fuzzy Syst. 2022, 30, 2300–2311. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.H.; Man, Z.H. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Zhao, Z.; Yang, J.; Li, S.; Yu, X.; Wang, Z. Continuous output feedback TSM control for uncertain systems with a DC-AC inverter example. IEEE Trans. Circuits-II 2017, 65, 71–75. [Google Scholar] [CrossRef]
- Lian, S.; Meng, W.; Lin, Z.; Shao, K.; Zheng, J.; Li, H.; Lu, R. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode. IEEE Trans. Ind. Electron. 2022, 69, 1597–1607. [Google Scholar] [CrossRef]
- Dong, R.Q.; Wu, A.G.; Zhang, Y. Anti-unwinding sliding mode attitude maneuver control for rigid spacecraft. IEEE Trans. Autom. Control 2022, 67, 978–985. [Google Scholar] [CrossRef]
- Man, Z.H.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control 1994, 39, 2464–2469. [Google Scholar]
- Yang, J.; Li, S.H.; Su, J.; Yu, X. Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances. Automatica 2013, 49, 2287–2291. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wang, Z.J.; Wang, T. Based on robust sliding mode and linear active disturbance rejection control for attitude of quadrotor load UAV. Nonlinear Dyn. 2022, 108, 3485–3503. [Google Scholar] [CrossRef]
- Wang, R.; Zhou, Z.; Zhu, X.P.; Wang, Z. Responses and suppression of Joined-Wing UAV in wind field based on distributed model and active disturbance rejection control. Aerosp. Sci. Technol. 2021, 115, 106803. [Google Scholar] [CrossRef]
- Yu, X.; Yang, J.; Li, S.H. Disturbance observer-based autonomous landing control of unmanned helicopters on moving shipboard. Nonlinear Dyn. 2020, 102, 131–150. [Google Scholar] [CrossRef]
- Hao, W.; Xian, B.; Xie, T. Fault-tolerant position tracking control design for a tilt tri-rotor unmanned aerial vehicle. IEEE Trans. Ind. Electron. 2022, 69, 604–612. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Muse, J. Nonlinear adaptive fault-tolerant quadrotor altitude and attitude tracking with multiple actuator faults. IEEE Trans. Control Syst. Technol. 2018, 26, 701–707. [Google Scholar] [CrossRef]
- Zhang, S.; Shuang, W.; Meng, Q. Control surface faults neural adaptive compensation control for tailless flying wing aircraft with uncertainties. Int. J. Control Autom. Syst. 2018, 16, 1660–1669. [Google Scholar] [CrossRef]
- Yan, K.; Chen, M.; Wu, Q.; Jiang, B. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts. IET Control Theory A 2019, 13, 1500–1513. [Google Scholar] [CrossRef]
- Mulgund, S.S.; Stengel, R.F. Optimal nonlinear estimation for aircraft flight control in wind shea. Automatica 1996, 32, 3–13. [Google Scholar] [CrossRef]
- Liu, C.J.; Chen, W.H. Disturbance rejection flight control for small fixed-wing unmanned aerial vehicles. J. Guid. Control Dyn. 2016, 39, 2804–2813. [Google Scholar] [CrossRef]
- Wang, Q.; Stengel, R.F. Robust nonlinear control of a hypersonic aircraft. J. Guid. Control Dyn. 2000, 23, 577–585. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Geometric homogeneity with applications to finite-time stability. Math. Control Signals Syst. 2005, 17, 101–127. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Z.; Ding, S.; Su, J. Composite controller design for quadrotor UAVs with uncertainties and noises based on combined Kalman filter and GPIO. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 882–892. [Google Scholar] [CrossRef]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, Y.; Ding, J.; Xie, X.; Zhang, W. Multiasynchronous extended dissipative sliding mode control of LC circuits in grid-connected system under actuator attacks. IEEE Trans. Circuits Syst. I 2025, 72, 1609–1620. [Google Scholar] [CrossRef]
- Shi, H.; Gao, W.; Jiang, X.; Su, C.; Li, P. Two-dimensional model-free Q-learning-based output feedback fault-tolerant control for batch processes. Comput. Chem. Eng. 2024, 182, 108583. [Google Scholar] [CrossRef]
- Liang, X.; Yan, Y.; Wang, W.; Su, T.; He, G.; Li, G.; Hou, Z.-G. Adaptive human–robot interaction torque estimation with high accuracy and strong tracking ability for a lower limb rehabilitation robot. IEEE-ASME Trans. Mechatron. 2024, 29, 4814–4825. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | S | c | m | ||
|---|---|---|---|---|---|
| Value | 1.135 | 0.55 | 0.19 | 0.20 | 13.5 |
| Units | kg·m2 | m2 | m | m2 | kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhao, Z. Composite Continuous High-Order Nonsingular Terminal Sliding Mode Control for Flying Wing UAVs with Disturbances and Actuator Faults. Mathematics 2025, 13, 2375. https://doi.org/10.3390/math13152375
Wang H, Zhao Z. Composite Continuous High-Order Nonsingular Terminal Sliding Mode Control for Flying Wing UAVs with Disturbances and Actuator Faults. Mathematics. 2025; 13(15):2375. https://doi.org/10.3390/math13152375
Chicago/Turabian StyleWang, Hao, and Zhenhua Zhao. 2025. "Composite Continuous High-Order Nonsingular Terminal Sliding Mode Control for Flying Wing UAVs with Disturbances and Actuator Faults" Mathematics 13, no. 15: 2375. https://doi.org/10.3390/math13152375
APA StyleWang, H., & Zhao, Z. (2025). Composite Continuous High-Order Nonsingular Terminal Sliding Mode Control for Flying Wing UAVs with Disturbances and Actuator Faults. Mathematics, 13(15), 2375. https://doi.org/10.3390/math13152375