
Evolutionary Dynamics and Policy Coordination in the Vehicle–Grid Interaction Market: A Tripartite Evolutionary Game Analysis


Abstract
1. Introduction
2. Methodology
2.1. Basic Conceptions in EGT
2.2. Theoretical Framework of VGI
2.3. Model Construction
3. Results
3.1. Equilibrium Points of the Tripartite Evolutionary Game Model
3.2. The Stability of the Equilibrium Points
4. Discussion
4.1. The Initial Phase: V0G Mode
4.2. The Growth Phase: V1G Mode
4.3. The Maturity Phase: V2G Mode
5. Numerical Simulation of Tripartite Evolutionary Game Model
5.1. The Initial Phase: V0G Mode
5.1.1. Impact of Peak–Valley Price Difference on System Evolution
5.1.2. Impact of Loss Aversion Costs on System Evolution
5.2. The Growth Phase: V1G Mode
5.2.1. Impact of Peak-Shaving Benefits and Regulatory Costs on System Evolution
5.2.2. Impact of Subsidy Levels on System Evolution
5.2.3. Impact of Subsidy-Sharing Ratio on System Evolution
5.3. The Maturity Phase: V2G Mode
5.3.1. Impact of Subsidy on System Evolution
5.3.2. Impact of Subsidy-Sharing Ratio on System Evolution
5.3.3. Impact of Upgrade Costs on System Evolution
5.3.4. Impact of Subsidy Levels on System Evolution
6. Conclusions and Recommendations
6.1. Main Conclusion
- (1)
- The quadrilateral game involving EV aggregators, local governments, and EV users lacks a stable equilibrium point, instead exhibiting five saddle points: , , , , and . Stable, sustainable cooperation among the three parties requires specific conditions.
- (2)
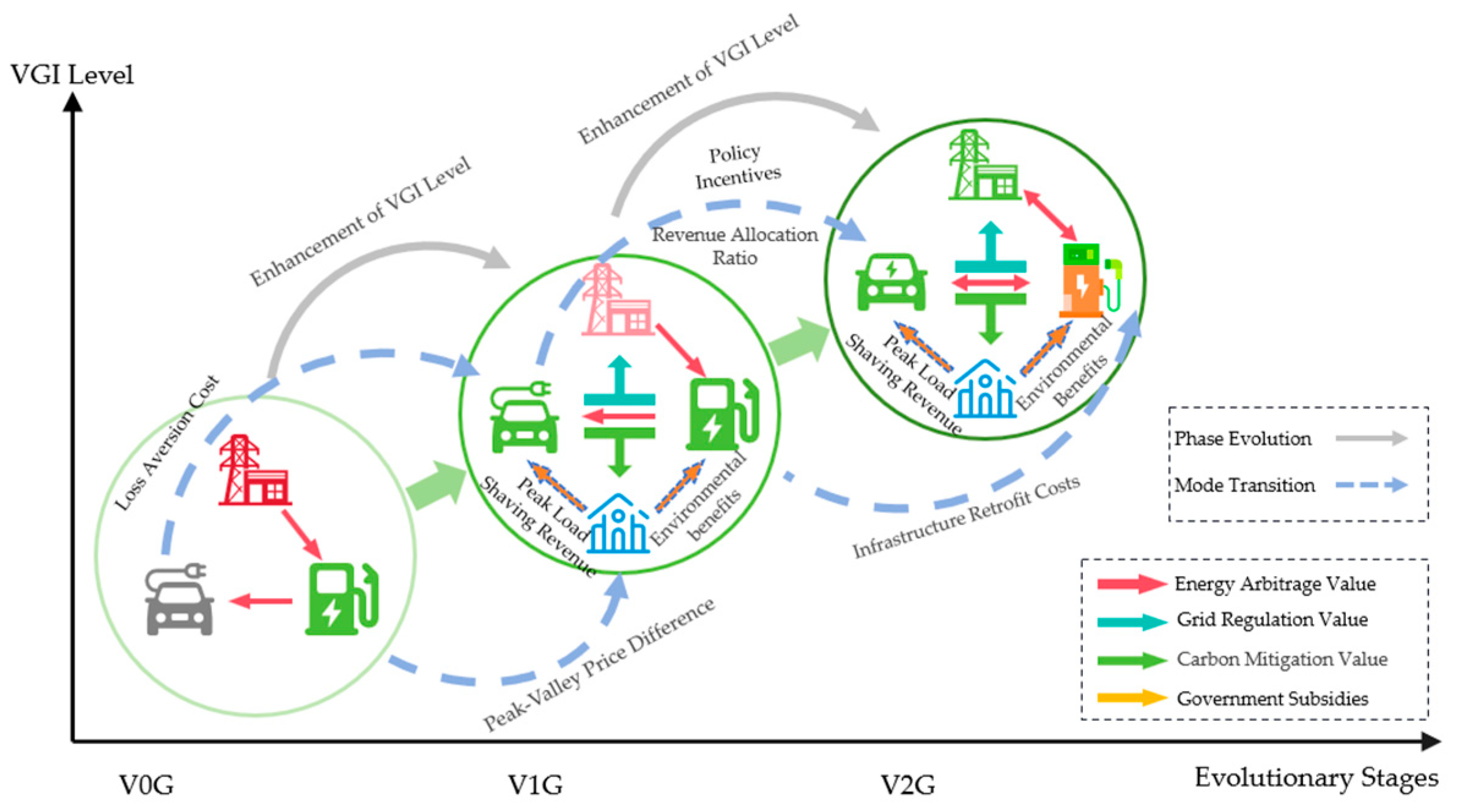
- The VGI market exhibits three distinct evolutionary phases: initial phase (V0G), growth phase (V1G), and maturity phase (V2G). Initially, EV users exhibit low willingness to participate in VGI. However, as social awareness improves, technology matures, and incentive mechanisms are refined, and the VGI market gradually evolves toward a more mature stage.
- (3)
- The transformation of the VGI market is mainly driven by (i) peak–valley price difference, (ii) peak-shaving benefits, (iii) local government subsidies, (iv) regulatory costs, (v) upgrade costs, (vi) subsidy levels, and (vii) loss aversion coefficients. The peak–valley price difference is the primary driver for the transition from V0G mode to V1G mode. EV aggregators may be reluctant to adopt the bidirectional interaction strategy due to high upgrade costs. Additionally, peak-shaving benefits and regulatory costs influence whether the local government implements subsidy policies. Furthermore, appropriately increasing subsidy levels can enhance the willingness of both EV users and EV aggregators to participate.
6.2. Policy Implications
- (1)
- For local governments, implementing differentiated policy designs and dynamic regulatory mechanisms is critical to facilitate orderly development of the vehicle–grid integration (VGI) market. Specific measures include (i) adopting time-of-use electricity pricing schemes that account for regional economic conditions and energy structures; (ii) developing multi-dimensional subsidy programs with appropriate caps to encourage electric vehicle (EV) user participation, while avoiding policy dependency; (iii) optimizing regulatory frameworks to improve EV aggregators’ operational efficiency; (iv) supporting digital platform development to streamline policy implementation; and (v) conducting public awareness campaigns to promote VGI participation and social responsibility.
- (2)
- For EV aggregators, establishing sustainable user engagement mechanisms that combine economic incentives with service quality assurance is paramount. During the V1G phase, aggregators should enhance user benefits through equitable revenue-sharing models and reliable service offerings. When transitioning to V2G mode, firms must strategically evaluate upgrade costs against potential subsidy benefits, utilizing government support to overcome technological barriers. From a regional perspective, EV aggregators should focus operations on areas exhibiting substantial peak–valley electricity price differentials and more liberalized energy markets, to maximize profitability.
6.3. Future Research Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Data Sources
References
- Wei, Y.F.; Han, X.B.; Lu, L.G.; Wang, H.W.; Li, J.Q.; Ouyang, M.G. Technology Prospects of Carbon Neutrality-oriented New-energy Vehicles and Vehicle-grid Interaction. Automot. Eng. 2022, 44, 444, 449–464. [Google Scholar] [CrossRef]
- Zhong, H.W.; Zhang, N.; Du, E.S.; Guo, H.Y.; Cai, Y.J.; Wang, P.; Gao, H.C.; Li, Y.W.; Liu, X.; Kang, C.Q.; et al. Planning, Operation and Market of New Power System: Research Progress and Practice. Proc. CSEE 2024, 44, 7084–7104. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.Q.; Zhang, Z.W.; Chang, G.; Lyu, J.F.; Yue, G.X.; Li, L.C.; Ni, W.D. Development Strategy of Flexible Resources in China’s Power System under the Carbon Peaking and Carbon Neutrality Goals. Strateg. Study CAE 2024, 26, 108–120. [Google Scholar] [CrossRef]
- Li, Y.L.; Ouyang, M.G.; Zhao, Z.M. Charging Mechanism, System Configuration and Promotion Pathway of Vehicle to Grid for Electric Vehicles. Proc. CSEE 2024, 44, 6920–6940. [Google Scholar] [CrossRef]
- Wang, H.X.; Yuan, J.H.; Chen, Z.; Ma, Y.M.; Dong, H.N.; Yuan, S.; Yang, J.Y. Review and Prospect of Key Techniques for Vehicle-Station-Network Integrated Operation in Smart City. Trans. China Electrotech. Soc. 2022, 37, 112–132. [Google Scholar] [CrossRef]
- Jazaeri, J. Demand Side Management in China: Market, Policies, and Future Trends. In Proceedings of the 2022 IEEE Sustainable Power and Energy Conference (iSPEC), Perth, Australia, 4–7 December 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Kang, M.; Lee, B.; Lee, Y. A Robust Optimization Approach for E-Bus Charging and Discharging Scheduling with Vehicle-to-Grid Integration. Mathematics 2025, 13, 1380. [Google Scholar] [CrossRef]
- Shen, X.; Tang, J.; Zhang, Y.; Qian, B.; Li, J.; Zhou, M.; Zhao, Y.; Yin, Y. Dynamic Evolution Game Strategy of Government, Power Grid, and Users in Electricity Market Demand-Side Management. Mathematics 2024, 12, 3249. [Google Scholar] [CrossRef]
- Mas’ud, A.A.; Wirba, A.V.; Mohammad-Sukki, F.; Sha’aban, Y.A. An Overview of Electrical Vehicle and Smart Grid Technology. In Key Themes in Energy Management: A Compilation of Current Practices, Research Advances, and Future Opportunities; Yunusa-Kaltungo, A., Ed.; Springer Nature Switzerland: Cham, Switzerland, 2024; pp. 71–90. [Google Scholar] [CrossRef]
- Hadian, E.; Akbari, H.; Farzinfar, M.; Saeed, S. Optimal Allocation of Electric Vehicle Charging Stations with Adopted Smart Charging/Discharging Schedule. IEEE Access 2020, 8, 196908–196919. [Google Scholar] [CrossRef]
- Ahmadi, S.E.; Kazemi-Razi, S.M.; Marzband, M.; Ikpehai, A.; Abusorrah, A. Multi-Objective Stochastic Techno-Economic-Environmental Optimization of Distribution Networks with G2V and V2G Systems. Electr. Power Syst. Res. 2023, 218, 109195. [Google Scholar] [CrossRef]
- Hakam, Y.; Gaga, A.; Tabaa, M.; El Hadadi, B. Enhancing Electric Vehicle Charger Performance with Synchronous Boost and Model Predictive Control for Vehicle-to-Grid Integration. Energies 2024, 17, 1787. [Google Scholar] [CrossRef]
- Lee, H.-G.; Choi, J.-W.; Ryu, S.-T.; Lee, K.-J. Life Degradation of Lithium-Ion Batteries under Vehicle-to-Grid Operations Based on a Multi-Physics Model. Int. J. Automot. Technol. 2025, 26, 315–326. [Google Scholar] [CrossRef]
- Sovacool, B.K.; Kester, J.; Noel, L.; Zarazua de Rubens, G. Actors, Business Models, and Innovation Activity Systems for Vehicle-to-Grid (V2G) Technology: A Comprehensive Review. Renew. Sustain. Energy Rev. 2020, 131, 109963. [Google Scholar] [CrossRef]
- Jaworski, J.; Zheng, N.; Preindl, M.; Xu, B. Vehicle-to-Grid Fleet Service Provision Considering Nonlinear Battery Behaviors. IEEE Trans. Transp. Electrif. 2024, 10, 2945–2955. [Google Scholar] [CrossRef]
- Wu, J.; Li, L.; Zhang, J.; Xiao, B. Flexibility Estimation of Electric Vehicles and Its Impact on the Future Power Grid. Int. J. Electr. Power Energy Syst. 2025, 164, 110435. [Google Scholar] [CrossRef]
- Zagrajek, K.; Paska, J.; Sosnowski, Ł.; Gobosz, K.; Wróblewski, K. Framework for the Introduction of Vehicle-to-Grid Technology into the Polish Electricity Market. Energies 2021, 14, 3673. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Y.X.; Li, B.; Diao, X.H.; Li, T.Y.; Jiang, L.R.; Zhang, J. Effect Analysis and Development Suggestion of Domestic and Foreign Vehicle-Grid Integration Pilots. Electr. Power Autom. Equip. 2022, 42, 280–292. [Google Scholar] [CrossRef]
- Cheng, P.; Wang, T. Optimizing the Emission Control Policies and Trade-in Program Effects: A Carbon-Constrained Closed-Loop Supply Chain Network Model. Transp. Res. Part E Logist. Transp. Rev. 2023, 179, 103311. [Google Scholar] [CrossRef]
- Mediwaththe, C.P.; Smith, D.B. Game-Theoretic Electric Vehicle Charging Management Resilient to Non-Ideal User Behavior. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3486–3495. [Google Scholar] [CrossRef]
- Brandt, T.; Wagner, S.; Neumann, D. Evaluating a Business Model for Vehicle-Grid Integration: Evidence from Germany. Transp. Res. Part D Transp. Environ. 2017, 50, 488–504. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Liu, Z.; Wang, W.; Sun, Q.; Pan, A.; Dou, J. A Stackelberg Game-Based Incentive Mechanism and Discharge Guidance Strategy for Private Electric Vehicles for Distribution Systems Load Restoration. Int. J. Electr. Power Energy Syst. 2024, 159, 110023. [Google Scholar] [CrossRef]
- Nagy, A.; Salama, M.M.; Abdelhadi, H.A.; Lotfy, M.E.; Abdelfattah, W. Optimizing DOCRs Coordination When Synergizing Energy Management with V2G Using Innovative Optimization Algorithms. Results Eng. 2024, 22, 102196. [Google Scholar] [CrossRef]
- Liu, D.; Wang, W.; Wang, L.; Jia, H.; Shi, M. Dynamic Pricing Strategy of Electric Vehicle Aggregators Based on DDPG Reinforcement Learning Algorithm. IEEE Access 2021, 9, 21556–21566. [Google Scholar] [CrossRef]
- Li, D.D.; Lin, W.Y.; Gao, W.W.; Shang, C.X. Optimal Investment Mode of New Energy Vehicle Charging Infrastructure under Public-Private-Partnership. Chin. J. Manag. Sci. 2024, 1–14. [Google Scholar] [CrossRef]
- Li, Y.; Su, H.; Chen, X.; Liu, J.; Shi, R. A V2G Scheduling Strategy Based on Electric Vehicle Users’ Willingness Model. In Proceedings of the 2021 IEEE 5th Conference on Energy Internet and Energy System Integration (EI2), Taiyuan, China, 22–25 October 2021; pp. 237–243. [Google Scholar] [CrossRef]
- Shi, L.F.; Lyu, S.N.; Lyu, T. Transaction Incentive Mechanism Design in V2G Market Considering Dynamic Loss Aversion. J. Ind. Eng. Eng. Manag. 2021, 35, 233–242. [Google Scholar] [CrossRef]
- Qi, J.; Li, L.; Hossain, J.; Lei, G. Optimizing Electric Vehicle Parking Lot Profitability through Vehicle-to-Grid Incentive Decision-Making in Multiple Energy Markets. Sustain. Energy Grids Netw. 2025, 41, 101595. [Google Scholar] [CrossRef]
- Cheng, Y.W. Energy Storage and Incentive Mechanism for New Energy Vehicles. Syst. Eng. Theory Pract. 2025, 45, 1621–1631. [Google Scholar]
- Smith, J.M.; Price, G.R. The Logic of Animal Conflict. Nature 1973, 246, 15–18. [Google Scholar] [CrossRef]
- Luan, W.P.; Wang, G.; Xu, D.Q. Advanced Metering Infrastructure Architecture Supporting Integration of Multiple Services and Applications. Proc. CSEE 2014, 34, 5088–5095. [Google Scholar] [CrossRef]
- Liu, X.F.; Gao, B.T.; Li, Y. Review of Game Theory Applications in Power Demand Side Management. Power Syst. Technol. 2018, 42, 2704–2711. [Google Scholar] [CrossRef]
- Karaki, A.; Al-Fagih, L. Evolutionary Game Theory as a Catalyst in Smart Grids: From Theoretical Insights to Practical Strategies. IEEE Access 2024, 12, 186926–186940. [Google Scholar] [CrossRef]
- Zhang, J.J.; Zhang, H.; Liu, Y. Evolutionary Game Analysis of Carbon Asset Pledge Financing Under Heterogeneous Emission Reduction Policies. Chin. J. Environ. Manag. 2021, 13, 70–80. [Google Scholar] [CrossRef]
- Fang, G.C.; He, Y.; Tian, L.X. Evolutionary Game Analysis of Government-Enterprise Carbon Emission Reduction Driven by Carbon Trading. Chin. J. Manag. Sci. 2024, 32, 196–206. [Google Scholar] [CrossRef]
- Chen, N.; Zhao, Y.; He, H.; Ma, X.; Xu, X.; Li, L.; Gang, S.; Xue, B. Stability Analysis of Carbon Emission Trading Mechanism in China Based on a Tripartite Evolutionary Game. Sci. Rep. 2025, 15, 7304. [Google Scholar] [CrossRef] [PubMed]
- Jiao, J.L.; Chen, J.; Li, L.L.; Li, F.Y. Evolutionary Game Analysis of Local Government and Enterprise Behavior Under Carbon Emission Reduction Reward-Punishment Mechanism. Chin. J. Manag. Sci. 2017, 25, 140–150. [Google Scholar] [CrossRef]
- Kang, K.; Zhao, Y.; Zhang, J.; Qiang, C. Evolutionary Game Theoretic Analysis on Low-Carbon Strategy for Supply Chain Enterprises. J. Clean. Prod. 2019, 230, 981–994. [Google Scholar] [CrossRef]
- Liu, K.D.; Yang, D.G.; Wang, G.H.; Zhou, Z.T. Policy Simulation and Modeling of Ecological Civilization Construction Based on System Dynamics. Chin. J. Manag. Sci. 2020, 28, 209–220. [Google Scholar] [CrossRef]
- Cheng, L.; Huang, P.; Zou, T.; Zhang, M.; Peng, P.; Lu, W. Evolutionary Game-Theoretical Approaches for Long-Term Strategic Bidding among Diverse Stakeholders in Large-Scale and Local Power Markets: Basic Concept, Modelling Review, and Future Vision. Int. J. Electr. Power Energy Syst. 2025, 166, 110589. [Google Scholar] [CrossRef]
- Liu, C.; Song, Y.; Wang, W.; Shi, X. The Governance of Manufacturers’ Greenwashing Behaviors: A Tripartite Evolutionary Game Analysis of Electric Vehicles. Appl. Energy 2023, 333, 120498. [Google Scholar] [CrossRef]
- Yuan, B.; Zhu, J.; Chen, Z.; Xu, C. How Can Stakeholders Collaborate to Promote the Interconnection of Charging Infrastructure? A Tripartite Evolutionary Game Analysis. Expert Syst. Appl. 2024, 255, 124798. [Google Scholar] [CrossRef]
- Wang, Y.; Fan, R.; Du, K.; Lin, J.; Wang, D.; Wang, Y. Private Charger Installation Game and Its Incentive Mechanism Considering Prospect Theory. Transp. Res. Part D Transp. Environ. 2022, 113, 103508. [Google Scholar] [CrossRef]
- Wei, Y.; Zhu, Y.; Qin, Y.; Li, Y.; Wang, H.; Han, X.; Lu, L.; Ouyang, M. A Hierarchical Framework for Vehicle-to-Grid (V2G) Distributed Control Combining Peer-to-Peer Blockchain with Systemic Scheduling. In Proceedings of the 2023 13th International Conference on Power and Energy Systems (ICPES), Chengdu, China, 8–10 December 2023; pp. 436–441. [Google Scholar] [CrossRef]
- Deng, R.; Shen, N.; Zhao, Y. Diffusion Model to Analyse the Performance of Electric Vehicle Policies: An Evolutionary Game Simulation. Transp. Res. Part D Transp. Environ. 2024, 127, 104037. [Google Scholar] [CrossRef]
- Zheng, P.; Pei, W.; Pan, W. Impact of Different Carbon Tax Conditions on the Behavioral Strategies of New Energy Vehicle Manufacturers and Governments—A Dynamic Analysis and Simulation Based on Prospect Theory. J. Clean. Prod. 2023, 407, 137132. [Google Scholar] [CrossRef]
- Gao, J.; Mao, M.; Yang, C.; Zhu, M.; Wang, Y.; Shi, Y.; Hatziargyriou, N. V2G Dynamic Tariff Strategy Based on Multiple Games. In Proceedings of the 2023 IEEE 6th International Electrical and Energy Conference (CIEEC), Hefei, China, 12–14 May 2023; pp. 4024–4029. [Google Scholar] [CrossRef]
- Zhu, Z.; Cheng, L.; Shen, T. Spontaneous Formation of Evolutionary Game Strategies for Long-Term Carbon Emission Reduction Based on Low-Carbon Trading Mechanism. Mathematics 2024, 12, 3109. [Google Scholar] [CrossRef]
- Cheng, L.; Zhang, J.; Yin, L.; Chen, Y.; Wang, J.; Liu, G.; Wang, X.; Zhang, D. General Three-Population Multi-Strategy Evolutionary Games for Long-Term on-Grid Bidding of Generation-Side Electricity Market. IEEE Access 2021, 9, 5177–5198. [Google Scholar] [CrossRef]
- Taylor, P.D.; Jonker, L.B. Evolutionary Stable Strategies and Game Dynamics. Math. Biosci. 1978, 40, 145–156. [Google Scholar] [CrossRef]
- Holmes, S.; Hofbauer, J.; Sigmund, K. Evolutionary Games and Population Dynamics. J. Am. Stat. Assoc. 2000, 95, 688. [Google Scholar] [CrossRef]
- Ritzberger, K.; Weibull, J.W. Evolutionary Selection in Normal-Form Games. Econometrica 1995, 63, 1371–1399. [Google Scholar] [CrossRef]
- Shi, Y.; Pan, M.; Peng, D. Replicator Dynamics and Evolutionary Game of Social Tolerance: The Role of Neutral Agents. Econom. Lett. 2017, 159, 10–14. [Google Scholar] [CrossRef]
- Cheng, L.; Huang, P.; Zhang, M.; Yang, R.; Wang, Y. Optimizing Electricity Markets through Game-Theoretical Methods: Strategic and Policy Implications for Power Purchasing and Generation Enterprises. Mathematics 2025, 13, 373. [Google Scholar] [CrossRef]
- Friedman, D. Evolutionary Games in Economics. Econometrica 1991, 59, 637–666. [Google Scholar] [CrossRef]
- Yuan, K.; Ma, L.; Wang, R. Research on Collaborative Governance Mechanism of Air Pollutant Emissions in Ports: A Tripartite Evolutionary Game Analysis with Evidence from Ningbo-Zhoushan Port. Mathematics 2025, 13, 2025. [Google Scholar] [CrossRef]
- Cheng, L.; Peng, P.; Huang, P.; Zhang, M.; Meng, X.; Lu, W. Leveraging Evolutionary Game Theory for Cleaner Production: Strategic Insights for Sustainable Energy Markets, Electric Vehicles, and Carbon Trading. J. Clean. Prod. 2025, 512, 145682. [Google Scholar] [CrossRef]
- Zhao, K.; Shi, K.F.; Zhang, X.; Ye, S.; Zhang, W.J.; Fu, Y.T. User Profiling for Vehicle-Grid Interaction Based on Big Data of Electric Vehicle Operation. Electr. Age 2025, 5, 20–25. Available online: https://link.cnki.net/doi/10.16081/j.epae.202208017 (accessed on 21 July 2025).
- Zhang, Z.Y.; Wu, Y.J.; Li, X.Q.; Zhang, L.; Nie, Z.C.; Ma, J. Islanded Microgrid Operation Strategy Supported by Aggregated EV Charging/Discharging. Mod. Electr. Power 2025, 1–12. [Google Scholar] [CrossRef]
- Hu, J.J.; Lu, J.Y.; Ma, W.S.; Li, G.Y.; Wang, W.; Yang, Y. Multi-Level Real-Time Control Strategy for EV Aggregators in Grid Peak Shaving. Autom. Electr. Power Syst. 2024, 48, 84–95. Available online: https://link.cnki.net/urlid/32.1180.TP.20240620.2013.005 (accessed on 21 July 2025).
- Xu, J.J.; Cheng, Y.L.; Zhang, T.F.; Liu, H.J.; Zhu, S.L.; Wu, Z.J. Optimal Dispatch of EV Clusters Considering Charging Behavior Characteristics and Adjustability. Autom. Electr. Power Syst. 2023, 47, 23–32. [Google Scholar] [CrossRef]
- Mobile Power Banks on Wheels Are Coming. Xinhua Net. Available online: https://www.xinhuanet.com/fortune/20250424/23447566ca794dcba53c0bd6c23e3436/c.html (accessed on 15 July 2025).
- Pang, S.L.; Zhao, Y.N.; Bi, K.F.; Yue, H.Z.; Zhang, Q. Pricing Strategy and Benefit Allocation for EV Aggregators in Demand Response. Adv. Technol. Electr. Eng. Energy 2024, 43, 41–50. Available online: https://ateee.iee.ac.cn/CN/10.12067/ATEEE2307016 (accessed on 21 July 2025).
- Yuan, J.H.; Wang, Z.H.; Xu, K.X.; Tan, Z.X.; Zhang, J.N. Dynamic User Preference-Driven Multi-Objective Cooperative Scheduling Strategy for EVs. Proc. CSU-EPSA 2025, 1–12. [Google Scholar] [CrossRef]
- Meng, C.Z.; Liu, M.; Chen, X.R.; Wang, K.; Pan, B.Y. Revenue Models and Benefit Analysis of User-Side Energy Storage in Guizhou Province. Distrib. Energy 2023, 8, 11–19. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, M.S.; Miao, H.Y.; Yuan, X.D.; Han, H.C. Evolutionary Analysis of Incentive Mechanisms for Vehicle-Grid Interaction Technology. J. Shanghai Jiao Tong Univ. 2024, 1–20. [Google Scholar] [CrossRef]
- Li, Q.; Yu, B.; Zu, J.C.; Shangguan, X.G. Optimizing Natural Gas Power Pricing Mechanism: Shanghai’s Practice. Price Theory Pract. 2020, 40–43. [Google Scholar] [CrossRef]
- Huan, J.J.; Luo, S.X.; Liu, Z.C.; He, C.G.; Han, X.Y. Two-Part Tariff Mechanism for Natural Gas Power in Guangdong: Cost Analysis and Price Estimation Based on LCOE Model. Price Theory Pract. 2024, 111–116, 223. Available online: https://link.cnki.net/doi/10.19851/j.cnki.CN11-1010/F.2024.05.135 (accessed on 21 July 2025).
- Su, W. Determining a Reasonable Pricing Range is Imperative. China Electric Power News 2023, 2. Available online: https://link.cnki.net/doi/10.28061/n.cnki.ncdlb.2023.001060 (accessed on 21 July 2025).
- Liu, N.X. Multi-Region Charging Pile Electricity Price Surge Exceeds 20%: Multi-Party Game Between Time-of-Use Pricing and Industry Competition. 21st Century Business Herald 2023, 5. Available online: https://link.cnki.net/doi/10.28723/n.cnki.nsjbd.2023.003064 (accessed on 21 July 2025).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Internal Equilibrium Points | Coordinate | Eigenvalue Symbol | Evolutionary Stability Results |
|---|---|---|---|
| Point 1 | (0, 0, 0) | ESS | |
| Point 2 | (1, 1, 1) | Unstable | |
| Point 3 | Saddle point |
| Party | Parameter | Definition |
|---|---|---|
| EV aggregators | The subsidy-sharing ratio for EV users in V2G mode. | |
| The subsidy-sharing ratio for EV users in V1G mode. | ||
| The service fee charged by the EV aggregators. | ||
| Management costs in the V1G strategy. | ||
| Upgrade costs for V2G charging infrastructure. | ||
| local government | The subsidy response coefficient in V1G mode. | |
| The subsidy standard in V1G mode. | ||
| The subsidy response coefficient in V2G mode. | ||
| The subsidy standard in V2G mode. | ||
| The regulatory cost for the subsidy strategy. | ||
| The peak-shaving benefit. | ||
| The environmental improvement benefits in the V1G mode without a subsidy. | ||
| The environmental improvement benefits in the V2G mode without a subsidy. | ||
| The incremental environmental improvement benefits in V1G mode with a subsidy. | ||
| The incremental environmental improvement benefits in V2G mode with a subsidy. | ||
| The environmental losses borne in V0G mode. | ||
| EV users | The perceived utility for users in V1G mode. | |
| The perceived utility for users in V2G mode. | ||
| The additional perceived utility with a subsidy. | ||
| The charging amount in V0G mode. | ||
| The peak-shaving amount in V1G mode without a subsidy. | ||
| The incremental peak-shaving amount in V0G mode with a subsidy. | ||
| The discharging amount in V2G mode without a subsidy. | ||
| The incremental discharging amount in V2G mode with a subsidy. | ||
| The peak electricity price. | ||
| The peak–valley price difference. | ||
| The reverse discharging price in V2G mode. | ||
| The charging cost in V0G mode. | ||
| The unit battery wear cost in V2G mode. | ||
| The loss aversion cost in V1G mode. | ||
| The incremental loss aversion cost in V1G mode. | ||
| The loss aversion cost in V2G mode. | ||
| The incremental energy loss aversion cost in V2G mode. |
| The Local Government | EV Users | ||
|---|---|---|---|
| Participate | Do Not Participate | ||
| EV aggregators | Subsidy strategy in V2G | , | , |
| , | , | ||
| No-subsidy strategy in V2G | , | , | |
| , | , | ||
| Subsidy strategy in V1G | , | , | |
| , | , | ||
| No-subsidy strategy in V1G | , | , | |
| , | , | ||
| Points | |||
|---|---|---|---|
| Point | ESS Condition | Saddle Point Condition | Unstable Point Condition |
|---|---|---|---|
| DNE | |||
| DNE | all conditions | DNE | |
| DNE | all conditions | DNE | |
| DNE | |||
| Point | Eigenvalues Symbol | Stability | Strategy |
|---|---|---|---|
| (-, -, N) | saddle | EV aggregators choose V1G strategy, the local government does not provide subsidies, and EV users do not participate in VGI | |
| (N, N, N) | saddle | EV aggregators choose V1G strategy, the local government does not provide subsidies, and EV users participate in V1G. | |
| (-, +, N) | unstable | EV aggregators choose V1G strategy, the local government provides subsidies, and EV users do not participate in VGI. | |
| (N, N, N) | saddle | EV aggregators choose V1G strategy, the local government provides subsidies, and EV users participate in V1G. | |
| (+, -, N) | unstable | EV aggregators choose V2G strategy, the local government does not provide subsidies, and EV users do not participate in VGI. | |
| (N, N, N) | saddle | EV aggregators choose V2G strategy, the local government does not provide subsidies, and EV users participate in V2G. | |
| (+, +, N) | unstable | EV aggregators choose V2G strategy, the local government provides subsidies, and EV users do not participate in VGI. | |
| (N, N, N) | saddle | EV aggregators choose V2G strategy, the local government provides subsidies, and EV users participate in V2G. |
| Scenario 1 | 0.4157 | 0.12 | 0.30 | 0.2 | 0.3 | 0.50 | 0.40 | 1000 | 5 |
| Scenario 2 | 0.9586 | 0.3886 | 0.40 | 0.3 | 0.50 | 0.4 | 0.20 | 1000 | 5 |
| Scenario 3 | 1.2288 | 0.6036 | 0.30 | 0.4 | 0.2 | 0.2 | 0.48 | 800 | 5 |
| Scenario 4 | 0.965 | 0.51 | 0.5 | 0.7 | 0.1 | 0.80 | 0.73 | 250 | 15 |
| Scenario 5 | 1.2623 | 0.7 | 0.4 | 0.7 | 0.1 | 0.9 | 1.50 | 250 | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, Q.; Lyu, Y.; Cao, J. Evolutionary Dynamics and Policy Coordination in the Vehicle–Grid Interaction Market: A Tripartite Evolutionary Game Analysis. Mathematics 2025, 13, 2356. https://doi.org/10.3390/math13152356
Shao Q, Lyu Y, Cao J. Evolutionary Dynamics and Policy Coordination in the Vehicle–Grid Interaction Market: A Tripartite Evolutionary Game Analysis. Mathematics. 2025; 13(15):2356. https://doi.org/10.3390/math13152356
Chicago/Turabian StyleShao, Qin, Ying Lyu, and Jian Cao. 2025. "Evolutionary Dynamics and Policy Coordination in the Vehicle–Grid Interaction Market: A Tripartite Evolutionary Game Analysis" Mathematics 13, no. 15: 2356. https://doi.org/10.3390/math13152356
APA StyleShao, Q., Lyu, Y., & Cao, J. (2025). Evolutionary Dynamics and Policy Coordination in the Vehicle–Grid Interaction Market: A Tripartite Evolutionary Game Analysis. Mathematics, 13(15), 2356. https://doi.org/10.3390/math13152356