
A Finite-Time Disturbance Observer-Based Control for Constrained Second-Order Dynamical Systems and Its Application to the Attitude Tracking of a UAV

 , ,
, ,
Abstract
1. Introduction
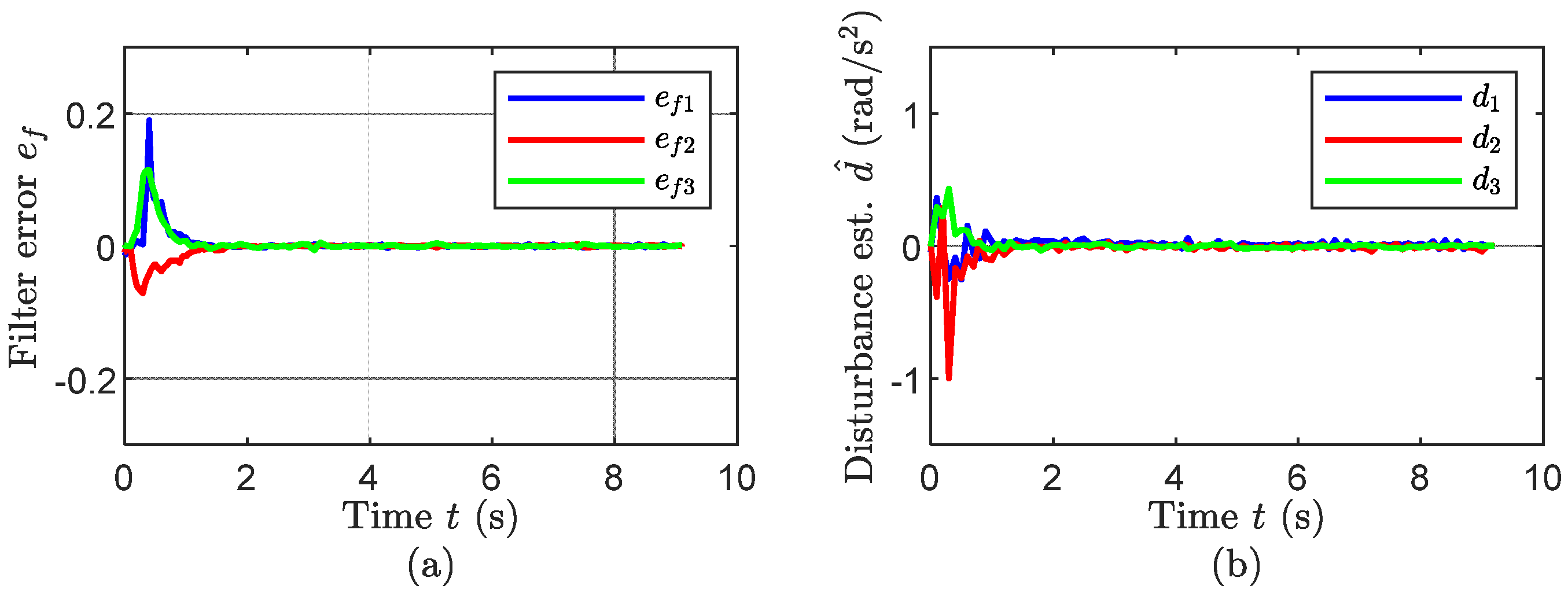
- The finite-time, unknown-input, nonlinear disturbance observer provides the controller with the external disturbance estimates, converging within a finite time. It enables the controller to rapidly and precisely compensate for the disturbances, enhancing the robustness of the whole system.
- The fast-converging finite-time filter not only helps to solve the “explosion of complexity” but also contributes to enhancing the rapid response and tracking performance of the system. Moreover, with the finite-time property, the filter guarantees the convergence of the entire control scheme.
- Explicit theoretical analyses are presented and discussed to clearly explain why the filter is fast-converging, how the controller successfully deals with the system’s state constraints, and why the whole scheme achieves finite-time convergence. These discussions clarify the merits of this work and help readers convey the nature of the proposed algorithm.
- The application of the proposed algorithm to a practical UAV illustrates how the main findings in this work can be utilized in real-world systems. Making use of the UAV’s dynamics, the finite-time convergence property is validated through several simulations with various initial conditions, including those are critically close to the constraints. Furthermore, experiments were conducted using an actual quadcopter UAV platform, and actual flight test data were collected and rigorously examined. As a result, the practical feasibility, applicability, and efficacy of the algorithm were clearly demonstrated.
2. Problem Statement and Preliminaries
2.1. Second-Order System Dynamics
2.2. Control Objective
2.3. Preliminaries
3. Methodology
3.1. Finite-Time, Unknown-Input, Nonlinear Observer
3.2. Fast-Converging Filter-Based Backstepping Tracking Controller
4. Illustrative Case Study: Application to UAV Attitude Tracking Control
4.1. Quadrotor UAV’s Attitude Dynamics
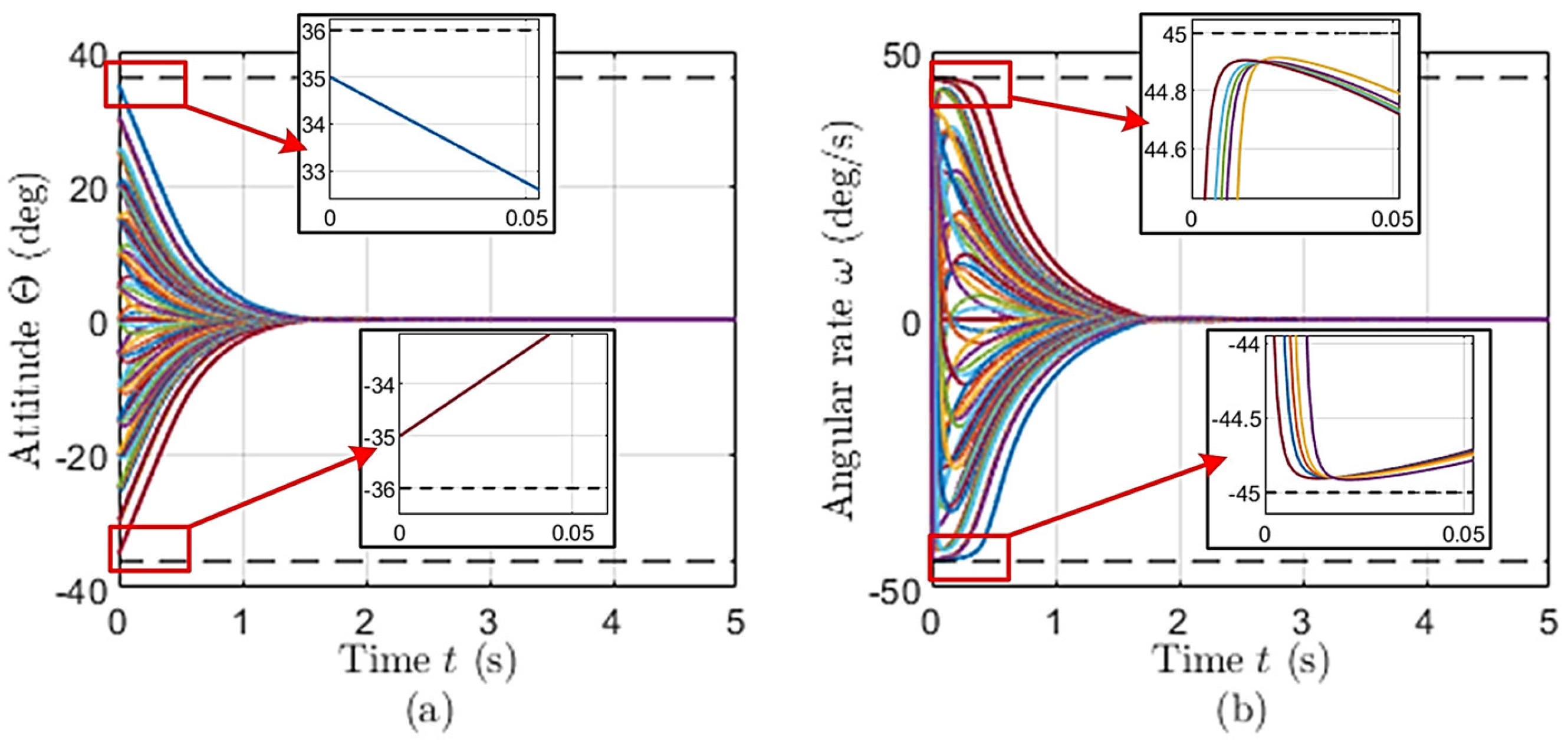
4.2. Finite-Time Convergence Validation
4.3. Experimental Feasibility Validation
4.3.1. Experimental Setup
4.3.2. Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Clark, R.N. Control System Dynamics; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Xuan-Mung, N.; Nguyen, N.P.; Pham, D.B.; Dao, N.-N.; Nguyen, H.T.; Ngoc, T.H.L.N.; Vu, M.T.; Hong, S.K. Novel gain-tuning for sliding mode control of second-order mechanical systems: Theory and experiments. Sci. Rep. 2023, 13, 10541. [Google Scholar] [CrossRef] [PubMed]
- Khalil, H. Nonlinear Systems; Prentice Hall: Saddle River, NJ, USA, 2002. [Google Scholar]
- Guo, K.; Zhang, H.; Wei, C. Novel sliding mode control of the manipulator based on a nonlinear disturbance observer. Sci. Rep. 2024, 14, 30656. [Google Scholar] [CrossRef] [PubMed]
- Xuan-Mung, N.; Golestani, M. Energy-Efficient Disturbance Observer-Based Attitude Tracking Control With Fixed-Time Convergence for Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 3659–3668. [Google Scholar] [CrossRef]
- Nguyen, N.; Park, D.; Ngoc, D.; Xuan-Mung, N.; Huynh, T.; Nguyen, T.; Hong, S. Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results. Drones 2022, 6, 172. [Google Scholar] [CrossRef]
- Wang, D.; Pan, Q.; Shi, Y.; Hu, J.; Zhao, C. Efficient Nonlinear Model Predictive Control for Quadrotor Trajectory Tracking: Algorithms and Experiment. IEEE Trans. Cybern. 2021, 51, 5057–5068. [Google Scholar] [CrossRef]
- Zheng, K.; Zhang, Q.; Hu, Y.; Wu, B. Design of fuzzy system-fuzzy neural network-backstepping control for complex robot system. Inf. Sci. 2021, 546, 1230–1255. [Google Scholar] [CrossRef]
- Cordeiro, R.A.; Azinheira, J.R.; Moutinho, A. Robustness of Incremental Backstepping Flight Controllers: The Boeing 747 Case Study. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3492–3505. [Google Scholar] [CrossRef]
- Liu, Y.; Duan, C.; Liu, L.; Cao, L. Discrete-Time Incremental Backstepping Control with Extended Kalman Filter for UAVs. Electronics 2023, 12, 3079. [Google Scholar] [CrossRef]
- Humaidi, A.; Hameed, M. Development of a New Adaptive Backstepping Control Design for a Non-Strict and Under-Actuated System Based on a PSO Tuner. Information 2019, 10, 38. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Golestani, M. Smooth, singularity-free, finite-time tracking control for Euler–Lagrange systems. Mathematics 2022, 10, 3850. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer. Appl. Sci. 2019, 9, 5184. [Google Scholar] [CrossRef]
- Zuo, Z.; Liu, C.; Han, Q.-L.; Song, J. Unmanned Aerial Vehicles: Control Methods and Future Challenges. IEEE/CAA J. Autom. Sin. 2022, 9, 601–614. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y.; Chen, X.; Qiu, J. Direct Adaptive Preassigned Finite-Time Control With Time-Delay and Quantized Input Using Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1222–1231. [Google Scholar] [CrossRef]
- Guo, W.; Liu, D. Adaptive second-order backstepping control for a class of 2DoF underactuated systems with input saturation and uncertain disturbances. Sci. Rep. 2024, 14, 601–614. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.; Lu, R.; Zuo, Z.; Li, X. An Overview of Finite/Fixed-Time Control and Its Application in Engineering Systems. IEEE/CAA J. Autom. Sin. 2022, 9, 2106–2120. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Robust adaptive formation control of quadcopters based on a leader–follower approach. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419862733. [Google Scholar] [CrossRef]
- Nguyen, V.C.; Kim, S.H. A novel fixed-time prescribed performance sliding mode control for uncertain wheeled mobile robots. Sci. Rep. 2021, 11, 5340. [Google Scholar] [CrossRef]
- Wang, C.; Li, S.; Ge, S.S. Finite-time sliding mode disturbance observer-based control for uncertain systems. Nonlinear Dyn. 2023, 111, 2191–2206. [Google Scholar]
- Ho, C.M.; Tran, D.T.; Nguyen, C.H.; Ahn, K.K. Adaptive Neural Command Filtered Control for Pneumatic Active Suspension with Prescribed Performance and Input Saturation. IEEE Access 2021, 9, 56855–56868. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, C.; Zhang, H. Finite-time adaptive fuzzy backstepping control with command filter and dynamic surface technique. ISA Trans. 2020, 99, 406–416. [Google Scholar]
- Yu, J.; Shi, P.; Chen, X.; Cui, G. Finite-time command filtered adaptive control for uncertain nonlinear systems with actuator faults. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4098–4109. [Google Scholar]
- Hajnorouzali, Y.; Malekzadeh, M.; Ataei, M. Finite-time disturbance observer based-control of flexible spacecraft. J. Vib. Control 2021, 29, 346–361. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, C.; Hu, J. Adaptive finite-time disturbance observer-based control for robotic systems with unknown dynamics. IEEE Trans. Control Syst. Technol. 2023, 31, 1581–1592. [Google Scholar]
- Zhang, H.; Chen, X.; Xie, L. Finite-time adaptive tracking control of nonlinear systems with bounded disturbances and unmodeled dynamics. IEEE Trans. Ind. Electron. 2021, 68, 1418–1428. [Google Scholar]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Hu, Q.; Jiang, B.; Zhang, Y. Observer-Based Output Feedback Attitude Stabilization for Spacecraft with Finite-Time Convergence. IEEE Trans. Cont. Syst. Tech. 2019, 27, 781–789. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Tian, B.; Zuo, Z.; Yan, X.; Wang, H. A fixed-time output feedback control scheme for double integrator systems. Automatica 2017, 80, 17–24. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S. Quadcopter Precision Landing on Moving Targets via Disturbance Observer-Based Controller and Autonomous Landing Planner. IEEE Access 2022, 10, 83580–83590. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, L. Command Filtered Backstepping Based Finite-Time Adaptive Fuzzy Event-Triggered Control for Unmanned Aerial Vehicle with Full-State Constraints. IEEE Trans. Veh. Technol. 2025, 1–13. [Google Scholar] [CrossRef]
- Xiuyu, Z.; Li, H.; Zhu, G.; Zhang, Y.; Wang, C.; Wang, Y.; Su, C.-Y. Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform. Drones 2024, 8, 264. [Google Scholar] [CrossRef]
- DJI. E305. Available online: http://www.dji.com/product/e305 (accessed on 30 April 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| diag() | kg·m2 | |
| m | ||
| N·s2 | ||
| - |
| Parameter | Value |
|---|---|
| rad | |
| rad/s | |
| rad | |
| 0 rad/s | |
| 0.7 | |
| Criteria | Convergence Time [s] | Overshoot [deg] | Steady-State Error [deg] |
|---|---|---|---|
| [32] (simulation) | 2.0 | 5.7 | 0 |
| [33] (experiment) | 3.5 | 2.9 | 1.2 |
| Proposed (simulation) | 1.7 | 0 | 0 |
| Proposed (experiment) | 1.2 | 0 | 0.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan Mung, N.; Tiep, N.H.; Au, L.T.K.; Anh, N.N.; Nguyen, X.; Phi, N. A Finite-Time Disturbance Observer-Based Control for Constrained Second-Order Dynamical Systems and Its Application to the Attitude Tracking of a UAV. Mathematics 2025, 13, 1810. https://doi.org/10.3390/math13111810
Xuan Mung N, Tiep NH, Au LTK, Anh NN, Nguyen X, Phi N. A Finite-Time Disturbance Observer-Based Control for Constrained Second-Order Dynamical Systems and Its Application to the Attitude Tracking of a UAV. Mathematics. 2025; 13(11):1810. https://doi.org/10.3390/math13111810
Chicago/Turabian StyleXuan Mung, Nguyen, Nguyen Huu Tiep, Loan Thi Kim Au, Nguyen Ngoc Anh, Xuan Nguyen, and Nguyen Phi. 2025. "A Finite-Time Disturbance Observer-Based Control for Constrained Second-Order Dynamical Systems and Its Application to the Attitude Tracking of a UAV" Mathematics 13, no. 11: 1810. https://doi.org/10.3390/math13111810
APA StyleXuan Mung, N., Tiep, N. H., Au, L. T. K., Anh, N. N., Nguyen, X., & Phi, N. (2025). A Finite-Time Disturbance Observer-Based Control for Constrained Second-Order Dynamical Systems and Its Application to the Attitude Tracking of a UAV. Mathematics, 13(11), 1810. https://doi.org/10.3390/math13111810