1. Introduction
With the rapid spread of the Internet, e-health is becoming more widespread and accessible. This approach, also known as e-healthcare, uses digital and telecommunications technologies—such as computers, mobile devices and online networks—to improve medical services. E-healthcare is often integrated with traditional healthcare to provide patients and healthcare consumers with direct access to medical information [
1,
2,
3]. However, when confidential images are subjected to cryptanalysis, sensitive data may be exposed, which could jeopardize individual privacy. Therefore, ensuring the security of medical image data has become an important priority [
4,
5,
6].
To safeguard sensitive medical data, patient images must undergo anonymization through encryption. Accessing the original image requires the use of a precise decryption key [
7,
8,
9]. Medical images possess unique characteristics, including strong pixel correlation, large data size, and significant redundancy [
10,
11,
12]. Encryption techniques such as tent maps and bit-plane manipulation can be employed to secure these images. Consequently, ensuring robust security measures for both the transmission and storage of digital medical images is essential.
In recent years, researchers have extensively explored the synchronization of chaotic trajectories, a topic that has garnered significant scientific attention. Chaotic synchronization refers to the phenomenon where initially uncoordinated chaotic systems evolve into a state of organized behavior over time, offering valuable insights into the dynamics of complex systems. Several studies have examined the application of the 3D Lorenz chaotic system for secure data transmission [
13,
14] and investigated methods to synchronize chaotic systems for enhancing secure communication [
15,
16].
The interest in chaotic synchronization stems from the intricate and partially unexplored characteristics of chaotic behavior. This field holds critical relevance across various domains, including secure communications, control engineering, robotics, neuroscience, information processing, and biomedical applications. Despite its promising potential, chaotic systems present significant challenges due to their inherent unpredictability and highly nonlinear properties, making their control and synchronization a complex endeavor.
In modern times, model-free approaches have become increasingly popular for describing systems with unpredictable and random properties in both structure and parameters. A growing challenge in control theory is the need for precise management of complex systems. While traditional control techniques are effective in well-defined, stable, and linear environments, they struggle to cope with the complexity and uncertainty inherent in nonlinear chaotic systems [
17,
18]. Although adaptive controllers offer partial solutions, they remain difficult to implement in high-dimensional datasets or unstructured environments [
19,
20].
To address these challenges, extensive research has focused on fuzzy mathematical models, which emulate human-like reasoning [
21,
22,
23,
24]. Fuzzy systems are broadly categorized into two types: the Takagi–Sugeno–Kang (TSK) fuzzy systems and the Mamdani–Larsen fuzzy systems. The Mamdani–Larsen approach is known for its linguistic clarity, robustness, and rule-based structure, making it suitable for interpretability and smooth decision-making. On the other hand, TSK fuzzy systems excel in function approximation, offering simpler rule bases, superior nonlinear modeling, fast learning, flexibility, and effective parameterization for optimization techniques. These properties make TSK fuzzy models particularly suitable for handling intricate nonlinear relationships between input and output variables and for efficient training using data. A deep TSK fuzzy classifier with a hierarchical architecture and interpretable linguistic rules has been developed and tested through computational experiments and real-world applications [
25]. Additionally, TSK fuzzy systems have been widely used in domains such as finance, medicine, and intelligent control systems [
26,
27].
Despite their advantages, fuzzy control in chaotic systems remains challenging due to issues such as inherent imprecision, the complexity of designing rule bases, difficulty in tuning membership functions, high implementation costs, and limited theoretical guarantees. Furthermore, fuzzy controllers may struggle to adapt to external disturbances and parameter uncertainties, leading to synchronization errors and increased system complexity.
In recent years, neural networks (NNs) have gained significant attention across multiple scientific and engineering disciplines for their capacity to handle complex nonlinear functions [
28,
29]. Neural networks are particularly powerful in modeling complex systems, function approximation, and integrating diverse data sources. Several biologically inspired neural architectures have been investigated, including the brain emotional learning controller (BELC) [
30], the cerebellar model articulation controller (CMAC) [
31,
32], RNN [
33,
34], radial basis function neural network (RBFNN) preprocessors combined with CMAC [
35,
36], and fuzzy neural networks (FNN) [
37,
38].
Neural networks possess several advantages, including the ability to process imprecise information, integrate human expertise, perform parallel computations, and exhibit high fault tolerance, making them well-suited for controlling complex systems. However, controlling chaotic systems remains highly challenging due to their sensitivity to initial conditions. The design and training of neural network controllers require careful selection of network architecture, data, and learning algorithms. Additionally, neural networks demand vast amounts of training data, involve computationally intensive architectures, and may face challenges in generalizability—controllers optimized for one system may not necessarily perform well for another.
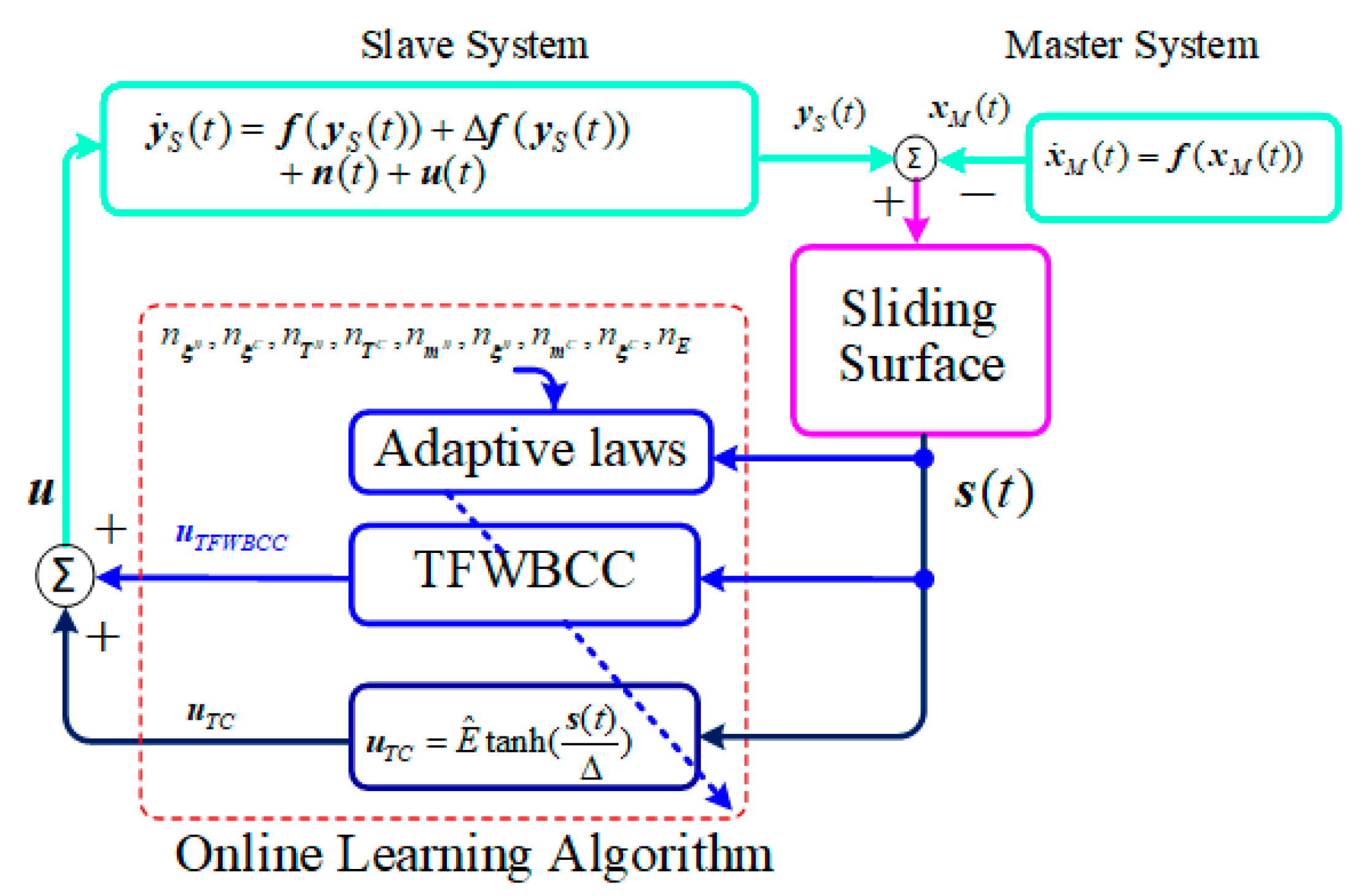
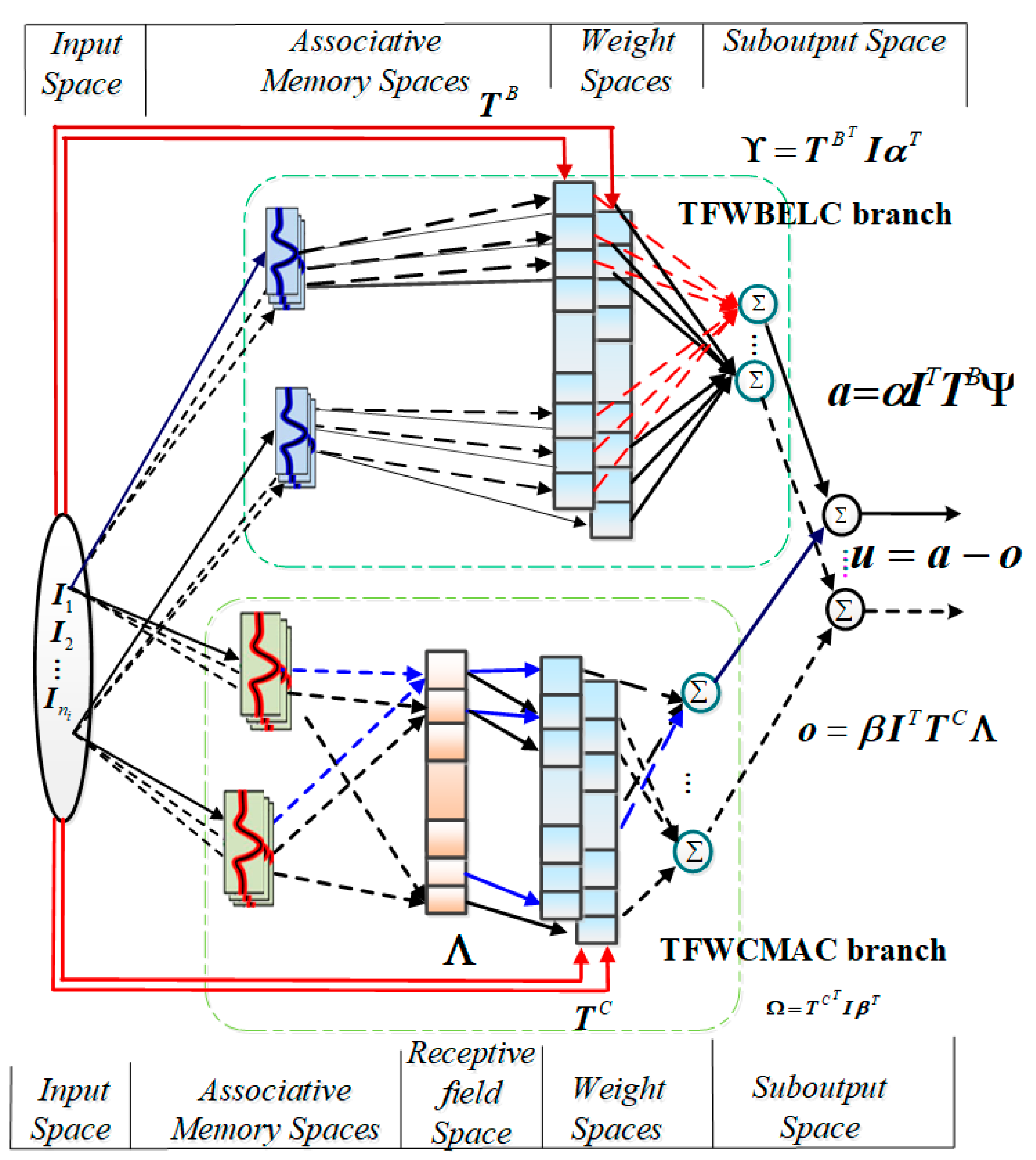
The proposed method integrates the strengths of wavelet features with Takagi–Sugeno–Kang fuzzy system (TSKFS) to create a TSK fuzzy wavelet brain cerebellar controller (TFWBCC). The effectiveness of the method is demonstrated by simulating 4D hyperchaotic synchronization. The main contributions of this work are as follows:
- (1)
A novel wavelet function is incorporated into the BELC and CMAC channels and improves their ability to account for uncertainty in the membership function. This approach utilizes TSKFS for dual-channel CMAC and BELC and enables more flexible parameter updates, improved mapping capabilities, and precise approximation performance.
- (2)
A TFWBCC is proposed to achieve synchronization in hyperchaotic systems.
- (3)
The stability of the proposed system is rigorously verified using Lyapunov stability theory.
This paper is structured as follows: The first section provides an overview of the problem being addressed. In the second section, the proposed TFWBCC approach for achieving chaotic system synchronization is detailed, along with an explanation of how the Lyapunov method is utilized to update the controller parameters,
Section 3 shows the proposed TFWBCC for 4D hyper master and slave chaotic synchronization and its application for medical secure image transmission.
Section 4 presents the numerical simulation results for the 4D hyperchaotic in MATLAB software.
Section 5 presents the medical image encryption using 4D hyper chaotic synchronization. Finally,
Section 6 presents the conclusion of the paper. To make it easier to understand the abbreviations, you can see the list of abbreviations used in this article in
Table 1.
The primary differences between the proposed control strategy and conventional methods are presented in
Table 2.
2. Problem Formulation
Generic four-dimensional master systems, which can be represented as follows:
where
and
are, respectively, the states of the master system and nonlinear functions.
The typical structure of the slave system is outlined below:
where
,
,
, and
are, respectively, system states, unknown external disturbances, control inputs, and uncertainties of the system. If a proper control input
,
is structured to ensure that the slave’s states align with those of the master. It indicates that both systems operate in perfect harmony, thus,
. Take into account a particular instance of a four-dimensional hyperchaotic master system, as described in reference [
38]:
in which the exact values
can be determined, allowing the slave system to be represented as follows:
where
is the control input vector,
is the unknown external disturbance,
is the uncertainty of the system, and
is the slave state. The tracking error can be calculated as follows:
The measurement of the tracking discrepancy is determined as follows:
Rewriting Equation (6) to the vector form as follows:
where
,
,
.
Given the known values
, an optimal controller can be determined as follows:
where
represents the feedback gain matrix. Substituting Equation (8) into Equation (7) yields
when
is adjusted to satisfy the Hurwitz stability condition, then
. However, in real-world applications, the ideal controller described in Equation (8) cannot be fully realized due to the unknown nature of the lumped uncertainty,
. To address this challenge, this research introduces the TFWBCC model, aiming to ensure effective synchronization of four-dimensional hyperchaotic systems.
4. Synchronization of a 4D Hyper Chaotic System [38]
This part of the study evaluates the performance of the proposed control approach by conducting extensive computational experiments in MATLAB/Simulink R2022b. The specific parameter values for the four-dimensional hyperchaotic model can be found in
Table 3.
The function rand(.) generates a random value within the interval [0, 1]. For the TFWBCC control framework, the chosen parameter settings are specifically tailored to its operation. A detailed overview of these parameters is provided in
Table 4.
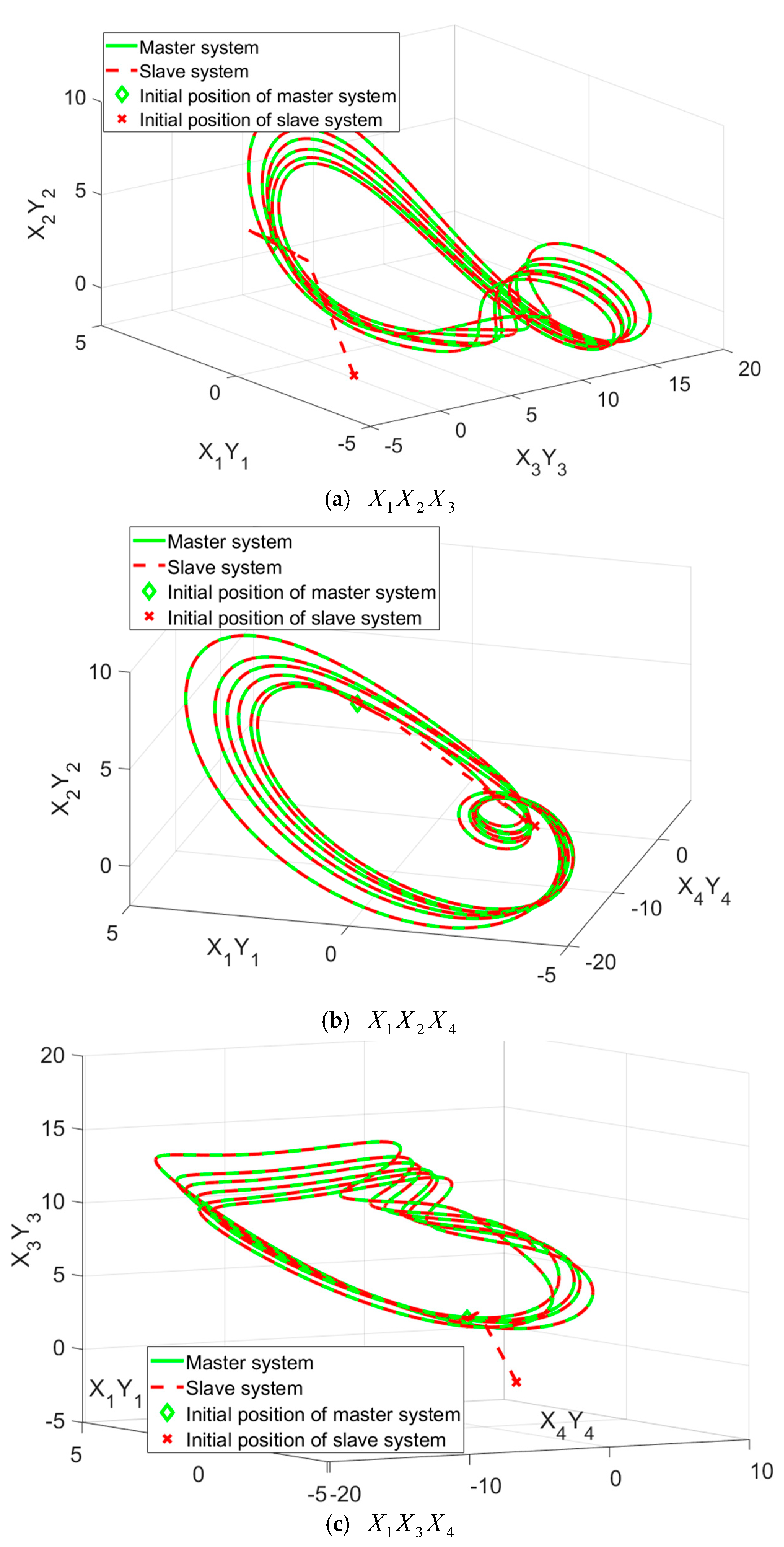
Figure 3 showcases the projection views of the synchronized states in the four-dimensional hyper-chaotic system using the TFWBCC approach. In
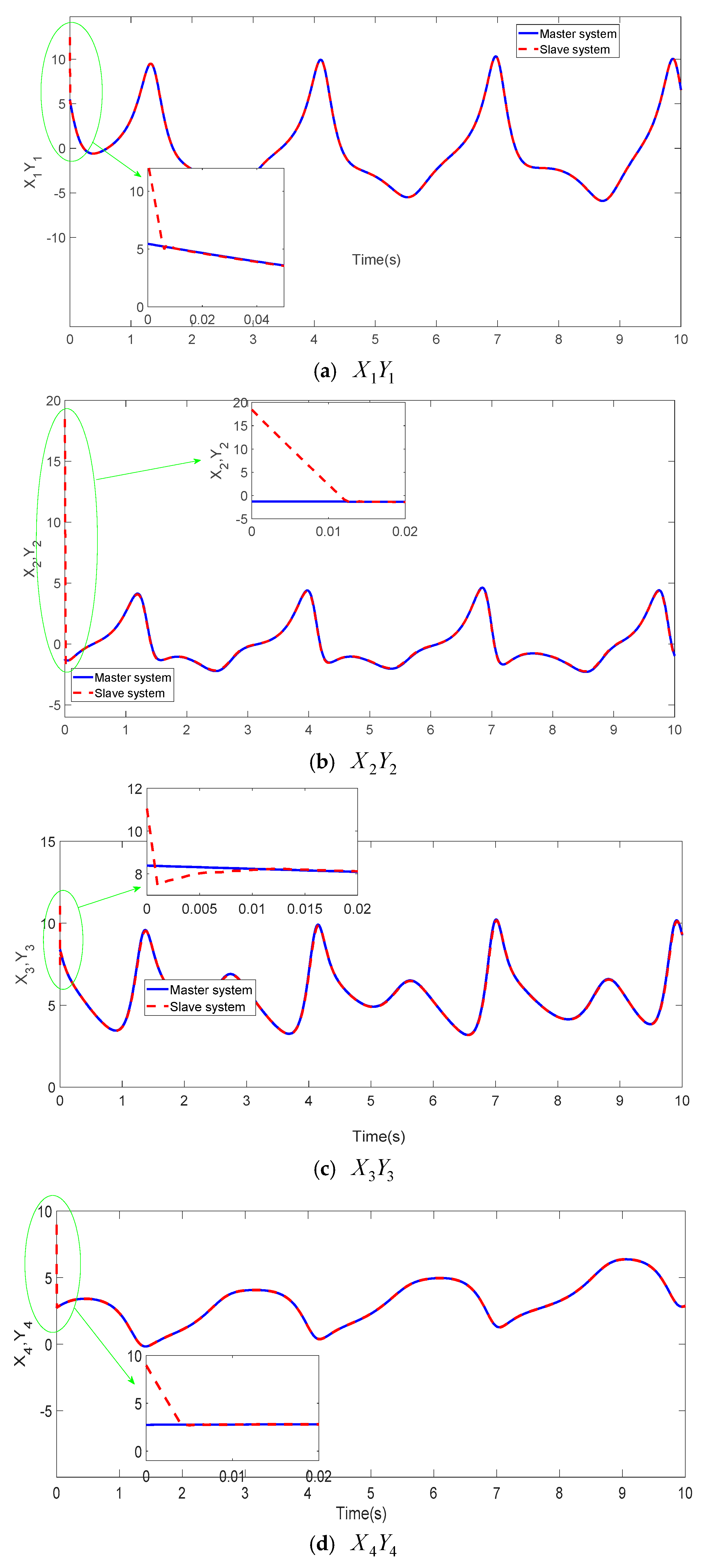
Figure 4, the comparative analysis of state trajectories between the master and slave systems under the proposed TFWBCC methodology is illustrated.
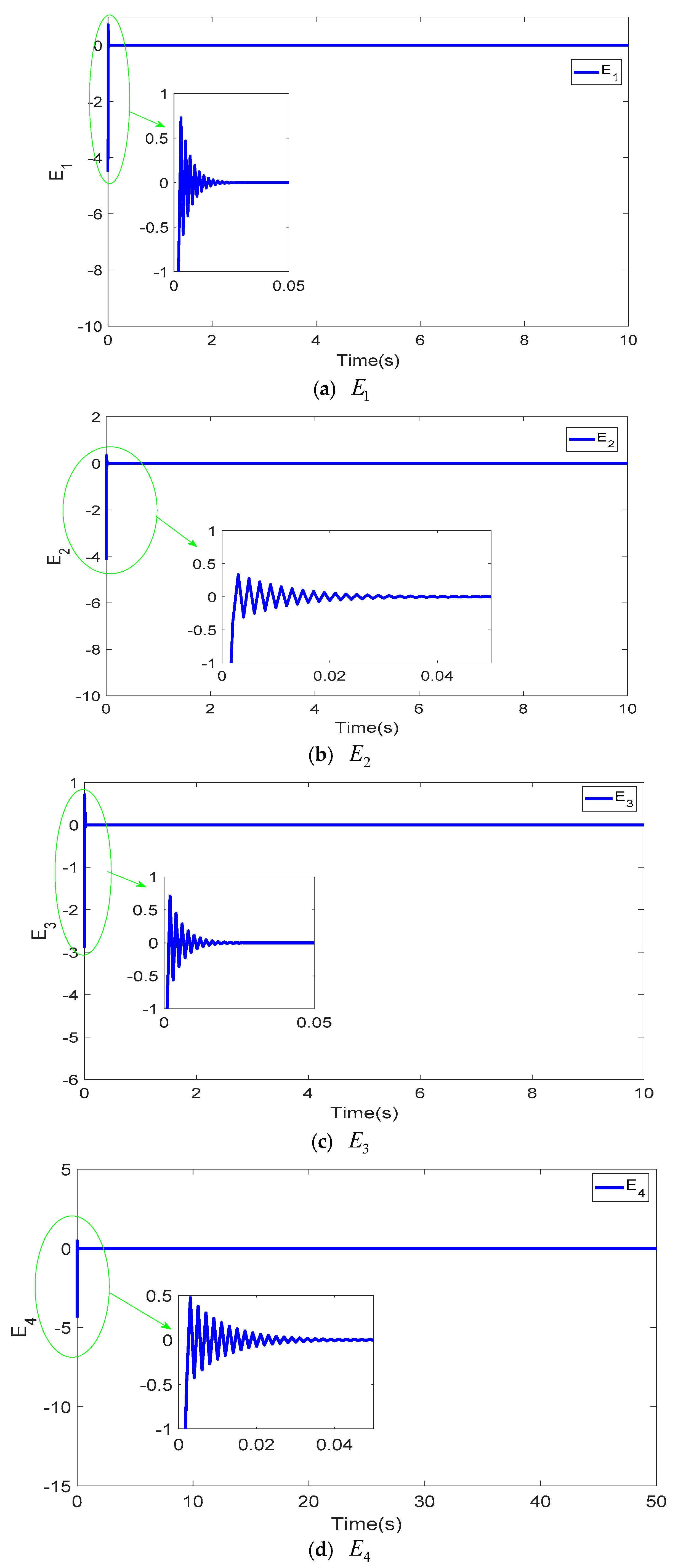
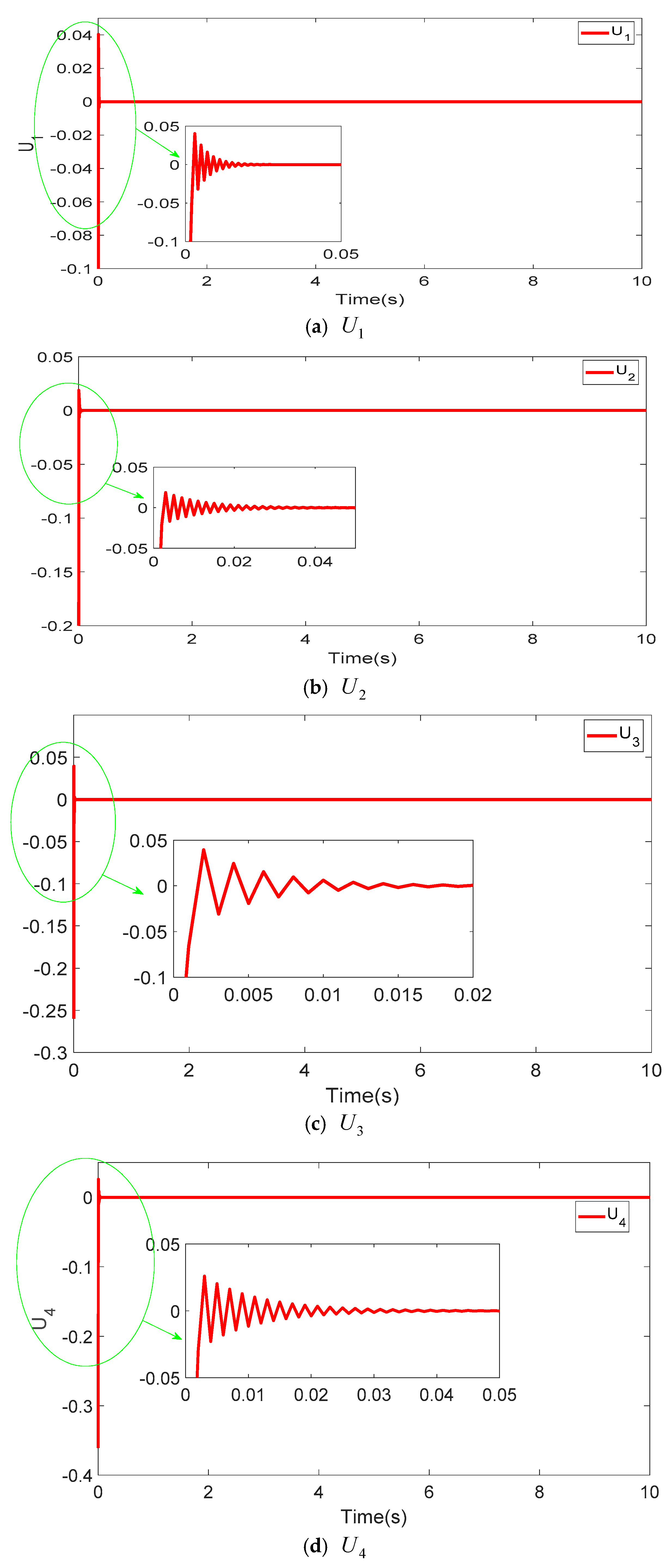
Figure 5 highlights the tracking error evolution, while
Figure 6 visualizes the applied control inputs. The simulation results confirm that the proposed strategy successfully achieves synchronization with minimal tracking deviations.
Notably, the TFWBCC method significantly reduces the average RMSE, attaining the lowest error value among all compared techniques (see
Table 5). However, due to its complex structure, the computational cost is higher. This trade-off is reasonable, as improved synchronization accuracy generally comes at the expense of increased processing demands. Specifically, the average RMSE of TFWBCC is reduced by a factor of 2.004 compared to the CMAC [
32] method, 1.923 times compared to RCMAC [
35], 1.8829 times compared to TSKCMAC [
13], and 1.8153 times compared to BELC [
13]. Additionally, the computation time of the TFWBCC approach is 5.6923 times lower than that of CMAC [
32], 5.2857 times lower than RCMAC [
35], and 4.3529 times lower than BELC [
13].
5. The Application of 4D Master–Slave Chaotic Synchronization for Medical Image Encryption
The following outlines the image security algorithm:
Step 1: The original medical image undergoes a sorting process based on a dual-number scheme [
13,
41]
where
m and
n are the length size and width size of the original image, respectively.
Step 2: Synchronize the master and the slave system.
Step 3: After the synchronization, discrete the master system of the chaotic 4D system
where
j = 1, 2, …
p ×
q represents the index of the
j-th iteration within the chaotic system’s progression.
Step 4: The initial step involves thoroughly preprocessing the decimal value as follows:
where
round(x) approximates
x to the nearest whole number,
mod(x, y) computes the remainder when x is divided by y,
abs(x) determines the absolute magnitude of
x, and
floor(x) rounds
x down to the nearest integer that is less than or equal to
x.
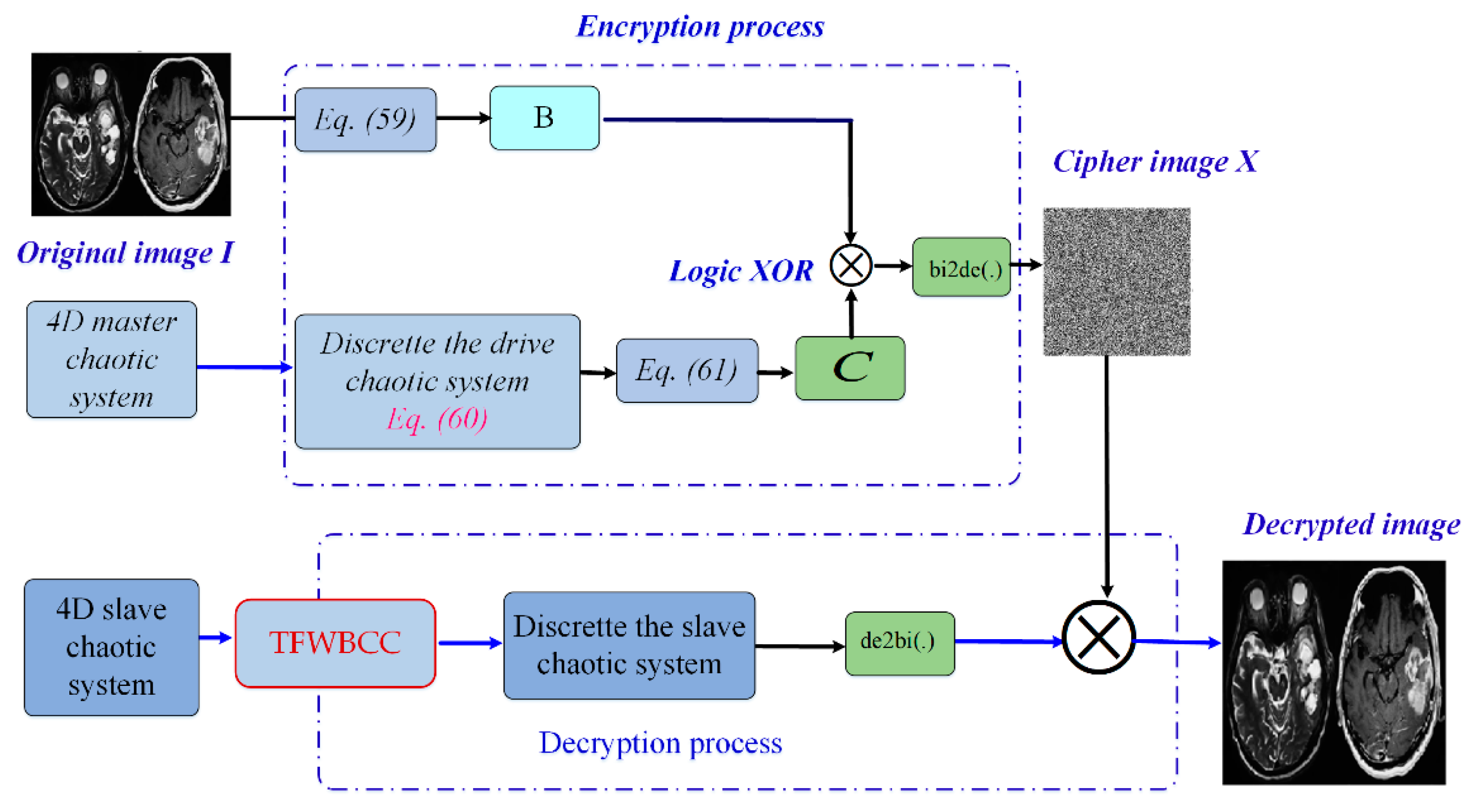
Step 5: The process of image encryption is integrated with the primary chaotic system through the application of the XOR logical operation, as described below
here,
de2bi(.) transforms a decimal number into its binary equivalent, while
⊕ represents the logical XOR operation.
Step 6: Convert the binary representation of G into decimal form, then reorganize to generate the encrypted image.
Step 7: Decryption Procedure.
The decryption method reverses the encryption steps, with the key difference being that the master chaotic time series is substituted by the corresponding slave chaotic time series. The structure of the medical image encryption using master–slave chaotic synchronization is presented in
Figure 7.
Some statistical analyses are performed to validate the proposed algorithm, such as histogram analysis and entropy analysis and NIST-SP800-22 test.
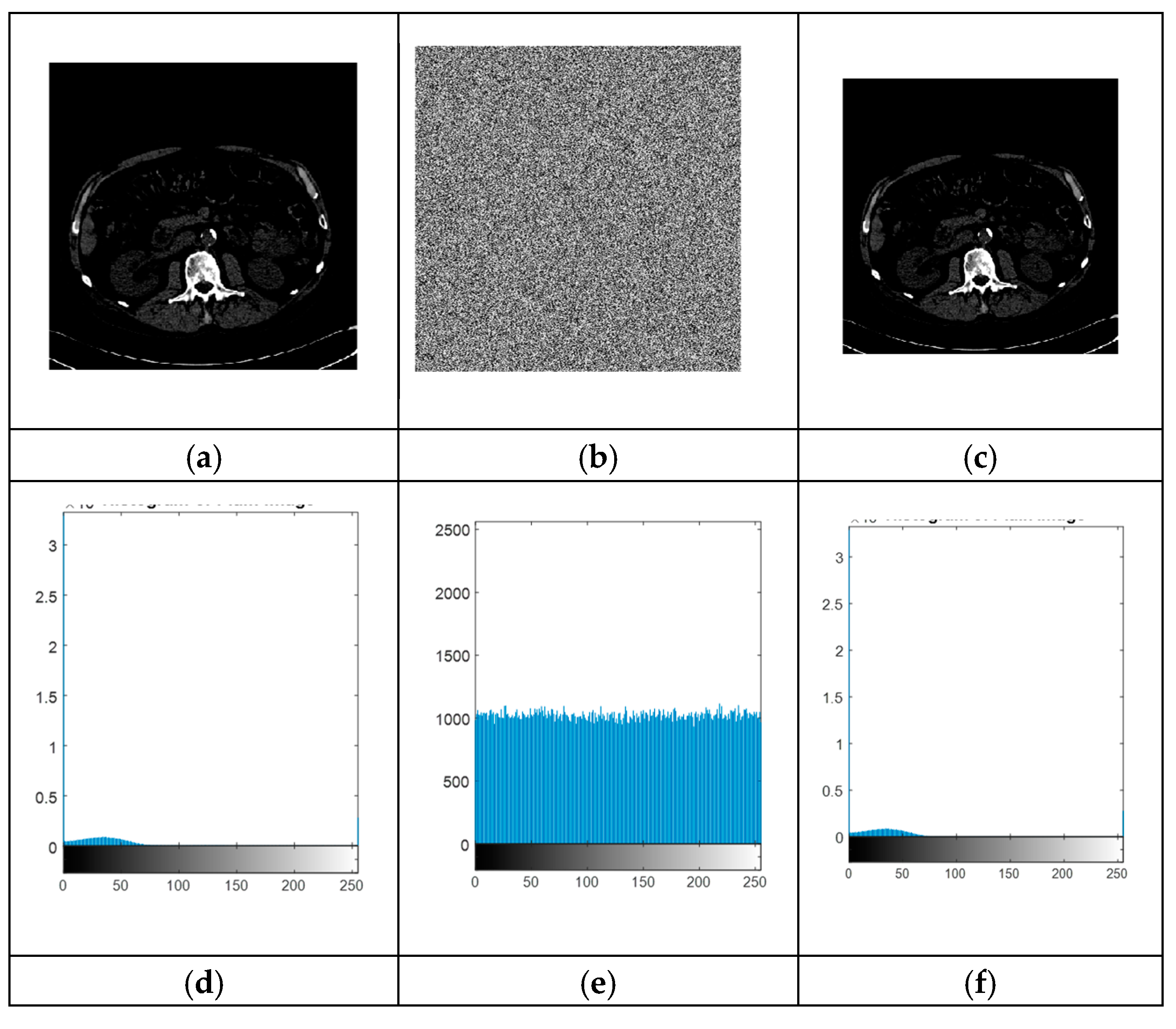
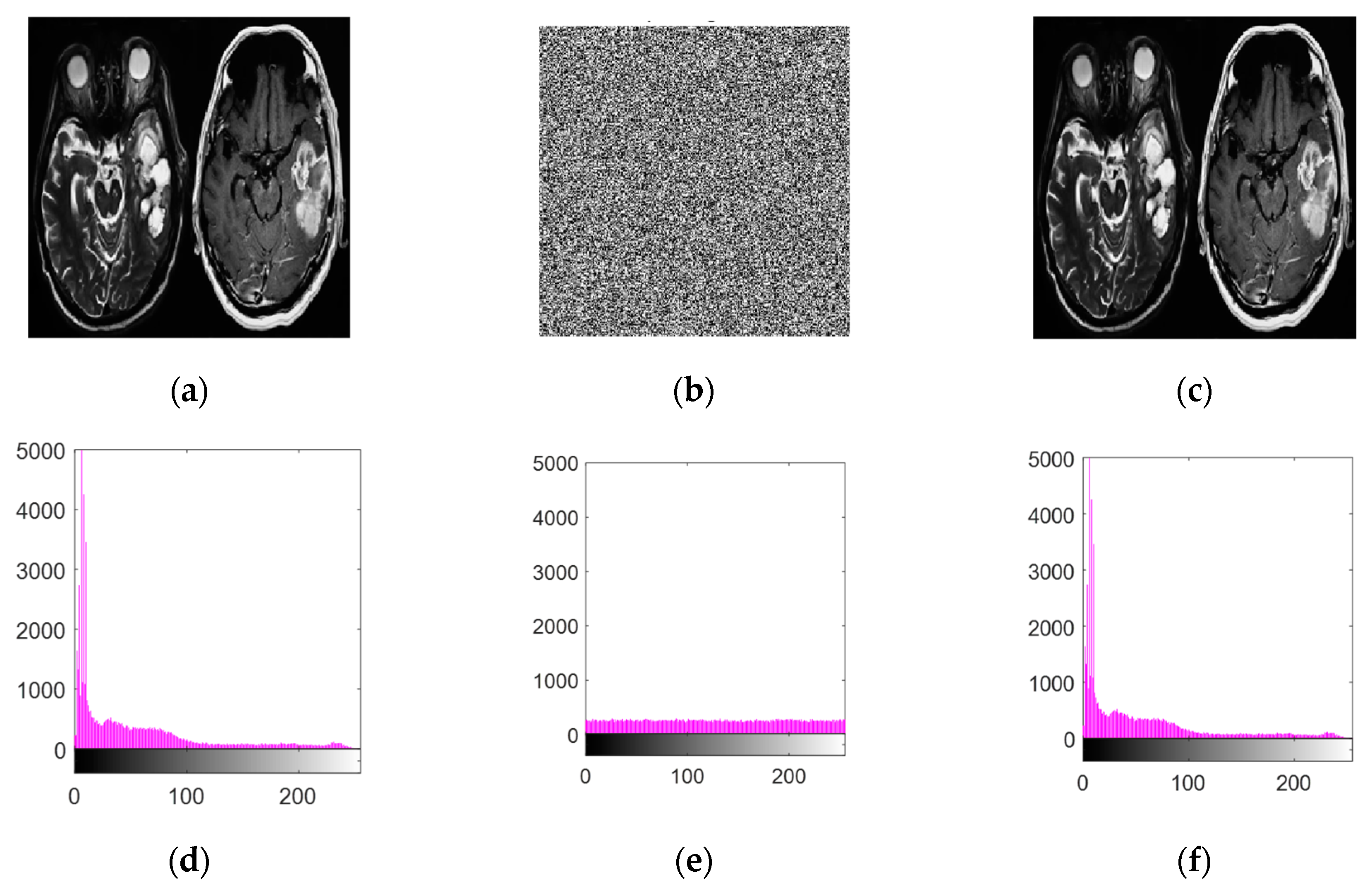
5.1. Histogram Examination
A histogram represents the pixel distribution within an image. To ensure security, the encrypted image must exhibit a distinct statistical distribution compared to the original plain image (refer to
Figure 8 and
Figure 9).
5.2. Entropy
Entropy quantifies the dispersion of grayscale values within an image. A uniform distribution results in a higher entropy value, reaching a theoretical maximum of 8. The entropy calculation is defined as follows:
where 2
N represents the total number of states in the information source, while
denotes the probability of occurrence for the symbol
. An ideally random image,
R, exhibits a uniform pixel intensity distribution within the range [0, 255], implying that the probability
is equal to 1/2561/2561/256 for every
j within [0, 255].
The entropy of the original image and the scrambled image is described in
Table 6. The different values between the original and the brain show that our method works well.
Table 6 shows the entropy of the scrambled images of our method compared to other methods. It can be seen that our method achieves a value close to 8, namely 7.9988 for the scrambled image lung and 7.9967 for the scrambled image ruptured brain. Our method gives the highest value among all methods. This shows that the content of the image is secure when there is an attack on the image information.
5.3. NIST SP800-22 Test
Referring to [
42], the randomness of output sequences is evaluated using the National Institute of Standards and Technology (NIST) SP800-22 test suite. This standard includes 15 distinct subtests, each producing a
p-value. To be considered random, the resulting
p-value for each subtest must lie between 0.01 and 1.
Table 7 presents the assessment results for a 100-bit sample derived from 262,144 (512 × 512) bits of the encrypted “Brain Image”. The findings indicate that all
p-values from the 15 subtests fall within the permissible range of 0–1, demonstrating that the encrypted image’s binary sequences successfully meet the randomness criteria. Consequently, the encryption effectively ensures pixel-level randomness.
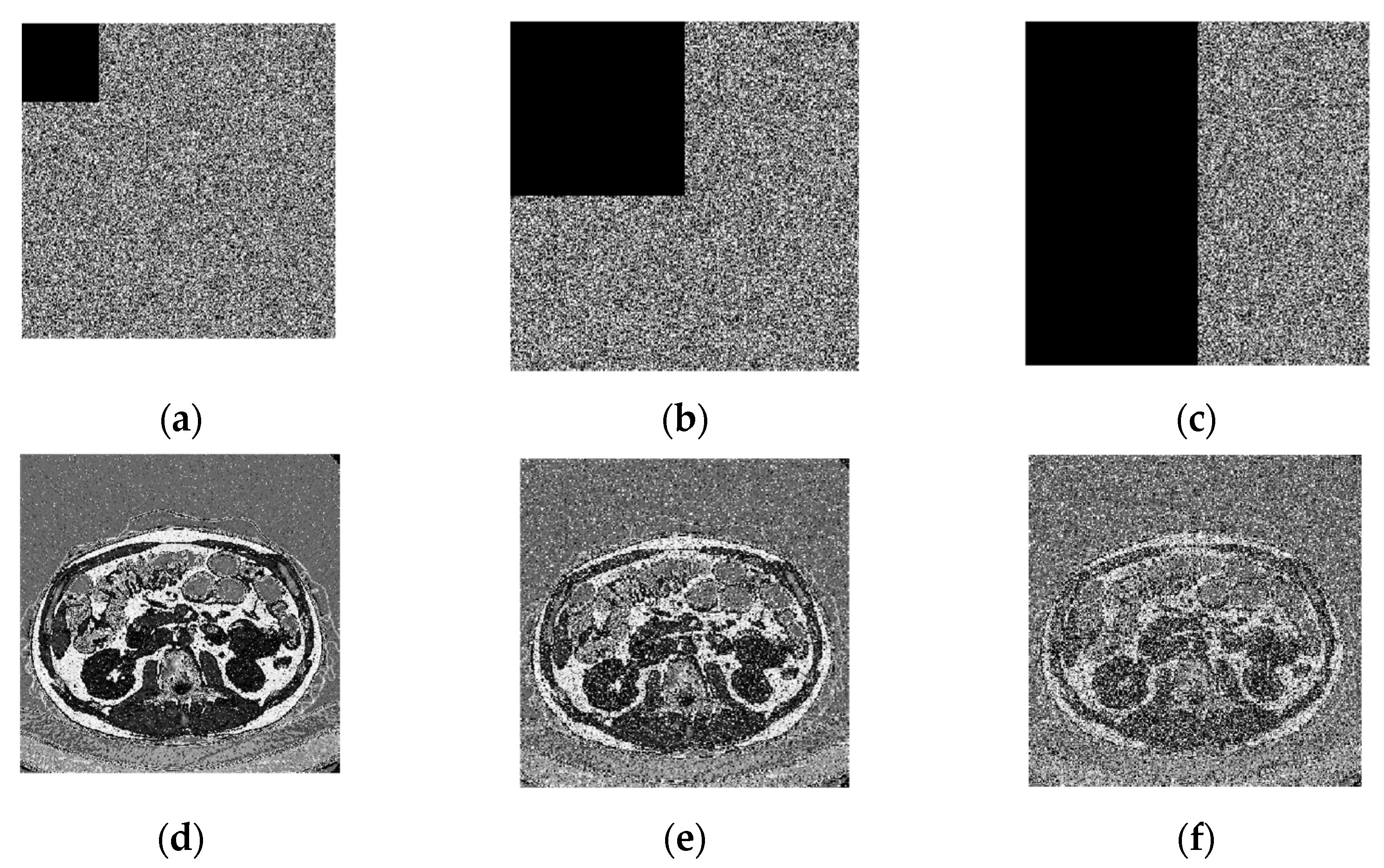
5.4. Cropping Attack Analysis
Our approach effectively handles data loss caused by cropping attacks.
Figure 10 a,c,e displays scrambled images with varying levels of data removal—specifically, 1/16, 1/4, and 1/2 of the original content. Correspondingly,
Figure 10b,d,f showcase the reconstructed images after decryption. The results indicate that our technique successfully recovers missing data. A comparative analysis in
Table 8 demonstrates that our method achieves a higher PSNR value, validating its superior ability to reconstruct images even in the presence of data loss.
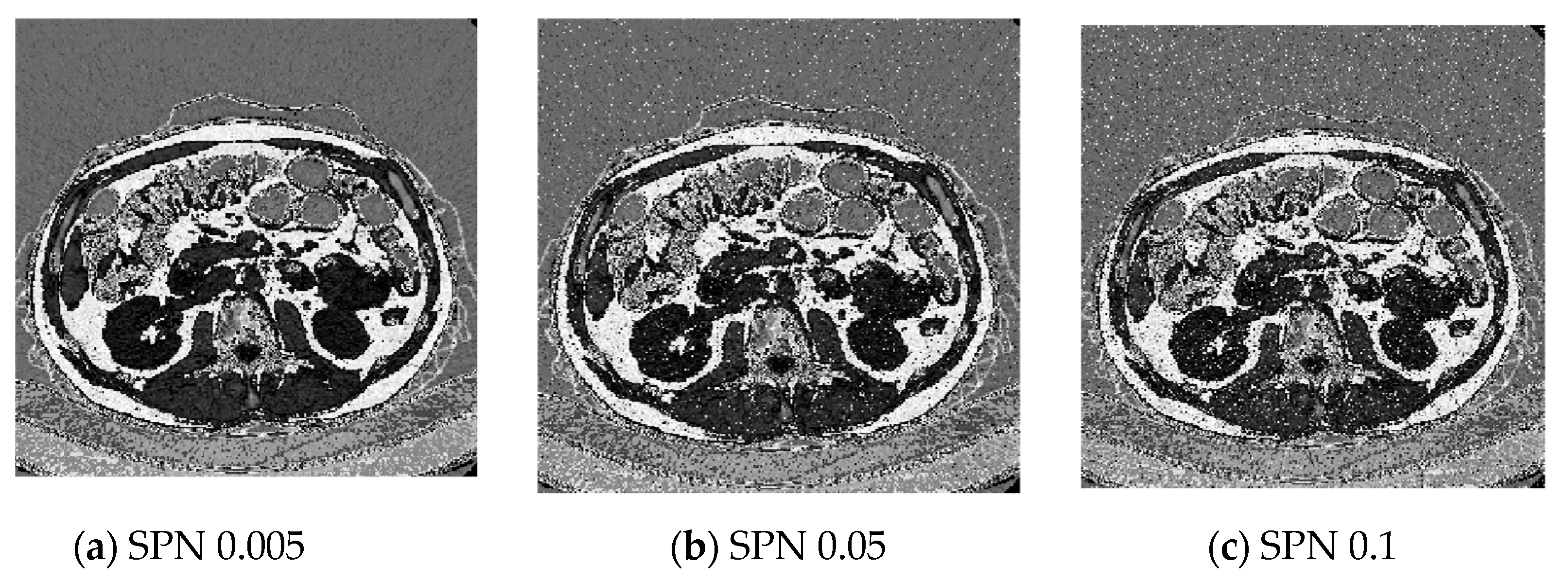
5.5. Image with Noise Analysis
To evaluate the effectiveness of the suggested approach, an image with adjustable noise parameters—both mean and variance—is utilized. This allows for an assessment of how varying levels of degradation impact on the method’s ability to encode the image while minimizing data loss. In this analysis, a lung image serves as the benchmark for testing the proposed technique.
Figure 11 presents the encoded image subjected to Salt and Pepper Noise (SPN) with noise variances of 0.005, 0.05, and 0.1. The corresponding PSNR values, which are detailed in
Table 9, indicate that (1) our encoding algorithm demonstrates significant robustness against SPN, maintaining PSNR values above 5.8 dB, and (2) the reconstructed images retain superior visual quality. These results confirm the method’s strong resistance to noise-induced distortions.
6. Conclusions
This research introduces a novel synchronization strategy for a four-dimensional hyper-jerk hyper-chaotic system. To accomplish this, adaptive parameter laws are formulated using a hybrid neural framework that combines TFWBC and TFWCC. The Lyapunov stability theorem is employed to establish online learning rules, ensuring both stability and system convergence. The proposed control mechanism effectively synchronizes the 4D master–slave hyper-jerk hyper-chaotic system with high precision. Additionally, the innovative TFWBCC approach is utilized to achieve synchronization of the chaotic states within the 4D Lorenz system. Furthermore, it is highlighted that this method can be applied to enhance the secure transmission of medical images. Simulation outcomes confirm the robustness and efficiency of the proposed control and encryption/decryption techniques. Statistical analyses further validate that the encryption/decryption approach ensures a high level of security.
Future advancements will first focus on adapting the proposed approach for hardware implementation, along with the development of a novel optimization algorithm, specifically an improved sparrow swarm optimization, will be implemented to improve the performance of the TFWBCC. In this study, we proposed a novel method for medical image encryption, demonstrating its effectiveness in ensuring data security and privacy. While the primary focus has been on medical imaging, the proposed approach holds significant potential for broader applications. Future studies could also explore its adaptation to other domains, such as secure communication systems, IoT device data encryption, and financial data protection. Investigating these avenues would further validate the versatility and scalability of the method, addressing critical security challenges across diverse fields. We believe these explorations will open new research directions and enhance the practical impact of the proposed framework.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}