
A CFD-Based Correction for Ship Mass and Longitudinal Center of Gravity to Improve Resistance Simulation

Abstract
1. Introduction
2. CFD Methods
2.1. Numerical Schemes
2.2. Governing Equations
2.3. Geometry and Test Conditions
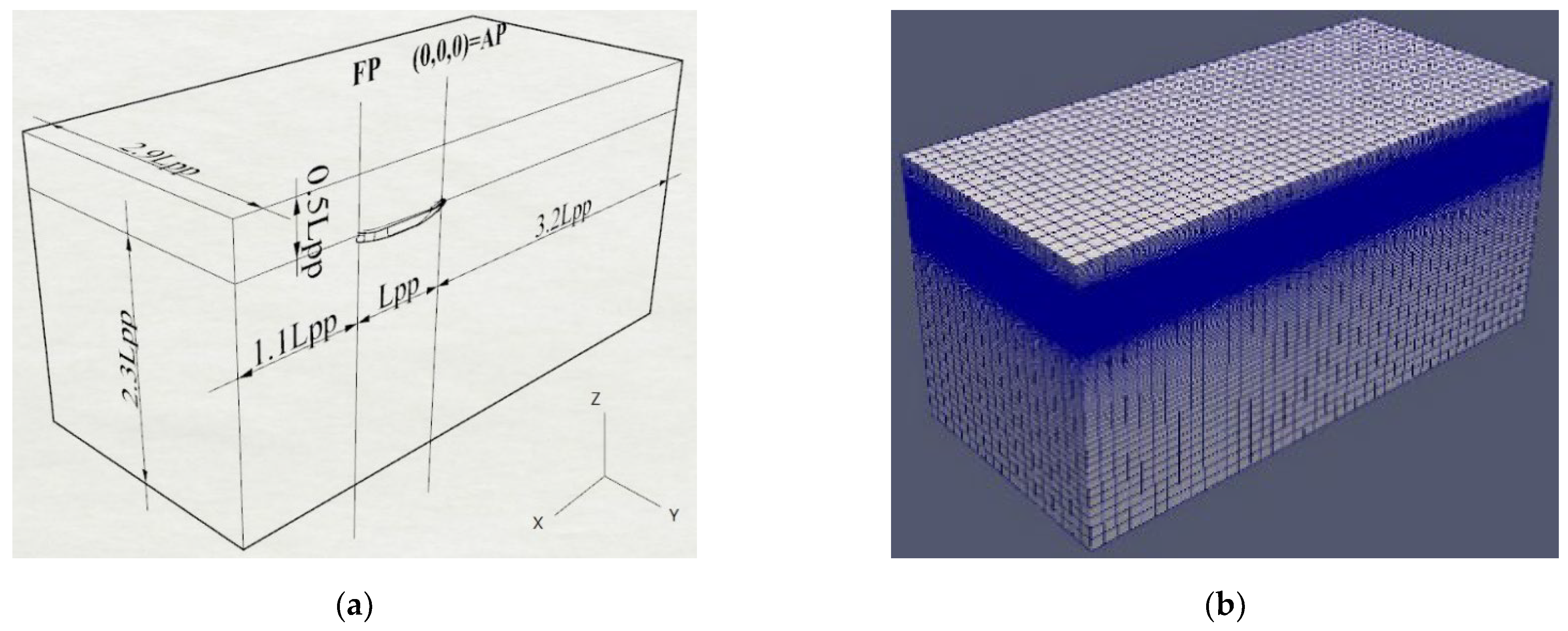
2.4. Domain Size and Grid Topology
2.5. Boundary Conditions
2.6. LCGM Correction
2.7. Verification and Validation (V & V)
3. Results
3.1. V & V for Static Mesh
3.2. LCGM Correction
3.3. Resistance Test for Dynamic Mesh
3.4. Flow Field Analysis
3.4.1. Ship-Making Wave Pattern
3.4.2. Boundary Layer and Wake Profile
3.5. Computational Time and Resources
4. Discussion
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| block coefficient | |
| moments of inertia in x, y, z direction | |
| non-dimensional turbulence kinetic energy | |
| total pressure | |
| non-dimensional normal distance to the wall | |
| turbulence viscosity | |
| AP | aft perpendicular |
| B | ship beam, maximum beam of waterline |
| BSRA | British Ship Research Association |
| CFD | Computational Fluid Dynamics |
| CT | ship total resistance coefficient |
| DES | Detached Eddy Simulation |
| DFBI | Dynamic Fluid Body Interaction |
| DTC | Duisburg Test Case |
| FP | forward perpendicular |
| Fr | Froude number |
| G2010 | the Workshop on CFD in Ship Hydrodynamics: Gothenburg 2010 |
| INEAN | Marine Technology Research Institute, Italy |
| ITTC | The International Towing Tank Conference |
| JBC | Japan Bulk Carrier |
| KCS | KRISO Container Ship |
| KRISO | Korea Research Institute of Ships and Ocean Engineering |
| KVLCC2 | KRISO Very Large Crude Carrier 2 |
| LCGM | Longitudinal Center of Gravity and Mass |
| LES | Large Eddy Simulation |
| LPP, L | length between perpendiculars |
| M | million |
| My | total pitch moment |
| NTNU | Norwegian University of Science and Technology |
| OU | Osaka University |
| OpenFOAM | Open Source Field and Manipulation |
| PANS | Partially Averaged Navier–Stokes |
| PIMPLE | PISO + SIMPLE |
| PISO | pressure implicit with splitting of operator |
| RANS | Reynolds Averaged Navier–Stokes |
| Re | Reynolds number |
| SIMMAN | the Workshop on Verification and Validation of Ship Manoeuvring Simulation Methods |
| SIMPLE | Semi-Implicit Method for Pressure Linked Equations |
| SST | Shear Stress Transport |
| T2015 | the Workshop on CFD in Ship Hydrodynamics: Tokyo 2015 |
| U | ship speed |
| V & V | Verification and Validation |
| VOF | Volume of Fluid |
| W2025 | the Workshop on CFD in Ship Hydrodynamics: Wageningen 2025 |
| WAT | Wake Analysis Tool |
| XCG | center of gravity in x direction |
| YCG | center of gravity in y direction |
| ZCG | center of gravity in z direction |
| k | turbulence kinetic energy |
| K | radius of gyration |
| m | ship mass |
| t | design draft |
| α | volume fraction |
| σ | sinkage |
| τ | trim |
| ω | specific turbulence dissipation rate |
References
- Kim, W.J.; Van, S.H.; Kim, D.H. Measurement of flows around modern commercial ship models. Exp. Fluids 2001, 31, 567–578. [Google Scholar] [CrossRef]
- Jasak, H.; Vukcevic, V.; Christ, D. Rapid free surface simulation for steady-state hull resistance with FVM using OpenFOAM. In Proceedings of the 30th Symposium on Naval Hydrodynamics, Hobart, Australia, 2–7 November 2014; pp. 548–554. [Google Scholar]
- Jasak, H. Naval Hydro Pack: Overview of Numerics and Capability. In Proceedings of the OceanFOAM Conference, Valparaiso, Chile, 5–6 October 2015; Danish Technical University: Copenhagen, Denmark, 2015; Volume 20. [Google Scholar]
- Gatin, I.; Jasak, H.; Vukcevic, V. Validation and verification of steady resistance KCS simulations with sinkage and trim using embedded free surface method. In Proceedings of the Tokyo 2015: A Workshop on CFD in Ship Hydrodynamics, Tokyo, Japan, 2–4 December 2015; pp. 431–436. [Google Scholar]
- Sadat-Hosseini, H.; Wu, P.-C.; Carrica, P.M.; Kim, H.; Toda, Y.; Stern, F. CFD verification and validation of added resistance and motions of KVLCC2 with fixed and free surge in short and long head waves. Ocean Eng. 2013, 59, 240–273. [Google Scholar] [CrossRef]
- Wu, P.-C.; Sadat-Hosseini, H.; Stern, F.; Toda, Y. Nominal wake fluctuation due to waves—Volume mean and distribution based on CFD. J. Jpn. Soc. Nav. Archit. Ocean Eng. 2017, 24, 13–19. [Google Scholar]
- Islam, H.; Akimoto, H. Prediction of ship resistance in Head Waves Using RaNS based solver. AIP Conf. Proc. 2016, 1754, 040011. [Google Scholar]
- Fureby, C.; Toxopeus, S.L.; Johansson, M.; Tormalm, M.; Petterson, K. A computational study of the flow around the KVLCC2 model hull at straight ahead conditions and at drift. Ocean Eng. 2016, 118, 1–16. [Google Scholar] [CrossRef]
- Hino, T.; Stern, F.; Larsson, L.; Visonneau, M.; Hirata, N.; Kim, J. (Eds.) Numerical Ship Hydrodynamics: An Assessment of the Tokyo 2015 Workshop; Springer Nature: Cham, Switzerland, 2021. [Google Scholar]
- Bensow, R.E.; van den Boogaard, M. Using a PANS simulation approach for the transient flow around the Japan bulk carrier. J. Ship Res. 2019, 63, 123–129. [Google Scholar] [CrossRef]
- Maasch, M.; Mizzi, K.; Atlar, M.; Fitzsimmons, P.; Turan, O. A generic wake analysis tool and its application to the Japan bulk carrier test case. Ocean Eng. 2019, 171, 575–589. [Google Scholar] [CrossRef]
- Islam, H.; Soares, C.G. Uncertainty analysis in ship resistance prediction using OpenFOAM. Ocean Eng. 2019, 191, 105805. [Google Scholar] [CrossRef]
- Mofidi, A. Ship Maneuvers with Discretized Propeller and Coupled Propeller Model/CFD. Ph.D. Dissertation, Department of Mechanical Engineering, University of Iowa, Iowa, IA, USA, 2017. [Google Scholar]
- Quallen, S.; Xing, T.; Carrica, P.; Li, Y.; Xu, J.J. CFD simulation of a floating offshore wind turbine system using a quasi-static crowfoot mooring-line model. In Proceedings of the 23rd International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Ubbink, O.; Issa, R.I. Method for capturing sharp fluid interfaces on arbitrary meshes. J. Comput. Phys. 1999, 153, 26–50. [Google Scholar] [CrossRef]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College of London, London, UK, 2002. [Google Scholar]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. In Proceedings of the 4th International Symposium on Turbulence, Heat and Mass Transfer, Antalya, Turkey, 12–17 October 2003; pp. 625–632. [Google Scholar]
- Holzmann, T. The numerical algorithms: SIMPLE, PISO and PIMPLE. In Mathematics, Numerics, Derivations and OpenFOAM®; Holzmann CFD: Loeben, Germany, 2006; pp. 93–121. Available online: https://holzmann-cfd.com/community/publications/mathematics-numerics-derivations-and-openfoam-free (accessed on 22 May 2025).
- Issa, R. Solution of the implicitly discretized fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Bingjie, G.; Steen, S. Added resistance of a VLCC in short waves. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Shanghai, China; 2010; Volume 49118, pp. 609–617. [Google Scholar]
- Tokyo 2015 Workshop on CFD in Ship Hydrodynamics. Available online: https://t2015.nmri.go.jp/index.html (accessed on 4 December 2015).
- Uncertainty Analysis in CFD, Verification and Validation Methodology and Procedures, ITTC 7.5-03-01-01. Available online: https://ittc.info/media/4184/75-03-01-01.pdf (accessed on 20 September 2008).
- Workshop on Verification and Validation of Ship Manoeuvring Simulation Methods. SIMMAN 2014. Available online: https://simman2014.dk/ (accessed on 11 November 2022).
- Larsson, L.; Stern, F.; Visonneau, M. (Eds.) Numerical Ship Hydrodynamics. An Assessment of the Gothenburg 2010 Workshop; Springer Science + Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KVLCC2 | KCS | JBC | |
|---|---|---|---|
| LPP (length between perpendiculars: m) | 5.5172 | 7.2786 | 7.0000 |
| Full scale LPP | 320.0 | 230.0 | 280 |
| Lwl (waterline length) | 5.6121 | 7.3577 | 7.1250 |
| Bwl (maximum waterline beam) | 1.0000 | 1.0190 | 1.1250 |
| D (depth: m) | 0.5172 | 0.6013 | 0.6250 |
| t (draft: m) | 0.3586 | 0.3418 | 0.4125 |
| Wetted area (m2) | 8.0838 without rudder | 9.4379 without rudder 0.1152 for the rudder | 12.2206 without rudder |
| CB (block coefficient) | 0.8098 | 0.6505 | 0.8580 |
| CM (Midship section coefficient) | 0.9980 | 0.9849 | 0.9981 |
| Fr (Froude number) | 0.142 | 0.26 | 0.142 |
| Full-scale speed (knots) | 15.5 | 24.0 | 14.5 |
| Hull Form | Grid Size | Total Grid Number Ntot. | Layers (Coverage) | Average y+ |
|---|---|---|---|---|
| KLVCC2 | Fine | 3,572,796 | 1 (96.9%) | 38.8 |
| Medium | 1,180,072 | 2 (95.2%) | 43.1 | |
| Coarse | 392,231 | 3 (97.5%) | 77.4 | |
| KCS | Fine | 1,640,158 | 3 (96.2%) | 99.8 |
| Medium | 572,221 | 3 (88.3%) | 113 | |
| Coarse | 208,055 | 3 (82.1%) | 155 | |
| JBC | Fine | 4,537,454 | 3 (99.2%) | 37.9 |
| Medium | 1,571,444 | 3 (99.7%) | 56.6 | |
| Coarse | 590,884 | 3 (94.5%) | 87.3 |
| U = (u, v, w) | p | ω | α | |||
|---|---|---|---|---|---|---|
| Solid surface | (0, 0, 0) | (11) | (12) | (13) | ||
| Inlet | (−U, 0, 0) | 0.00015 | 2 | for | ||
| Outlet | adjusted by α, U0 | or 0.00015 for −flux | or 2 for −flux | If α > 1, α = 1 If 0 < α < 1, If α < 0, α = 0 | ||
| Top | for −flux | = 0 or for −flux | Same as outlet | |||
| Bottom, Mid-plane | Symmetric condition: | |||||
| Parameters | D | S1 | S2 | S3 | rG | RG | ε12%S1 | pG/pG,th | UG%S1 | UD%D | Uv% | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CT × 103 | Value | 4.568 | 4.614 | 4.814 | 5.219 | 1.414 | 0.493 | −4.335 | 1.020 | 4.45 | 1.0 | 5.56 |
| E%D | −1.01 | −5.39 | −14.3 | Verified | Validated | |||||||
| Parameters | D | S1 | S2 | S3 | rG | RG | ε12%S1 | pG/pG,th | UG%S1 | UD%D | Uv% | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CT × 103 | Value | 3.711 | 3.527 | 3.555 | 3.755 | 1.414 | 0.142 | 0.807 | 2.813 | 0.96 | 1.0 | 1.39 |
| E%D | 4.97 | 4.20 | −1.19 | Verified | -- | |||||||
| Parameters | D | S1 | S2 | S3 | rG | RG | ε12%S1 | pG/pG,th | UG%S1 | UD%D | Uv% | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CT × 103 | Value | 4.289 | 4.400 | 4.577 | 5.961 | 1.414 | 0.128 | 4.023 | 2.967 | 5.03 | 1.0 | 5.26 |
| E%D | −2.59 | −6.72 | −39.0 | Verified | Validated | |||||||
| KVLCC2 (Fine Grid) | KCS (Fine Grid) | JBC (Medium Grid) | ||||
|---|---|---|---|---|---|---|
| Experimental Values | Corrected Values | Experimental Values | Corrected Values | Experimental Values | Corrected Values | |
| Mass (kg) | 1600.311 | 1586.416 | 1648.150 | 1650.811 | 2782.013 | 2779.125 |
| XCG (m) | 2.9506 | 2.9411 | 3.5316 | 3.5283 | 3.67833 | 3.67796 |
| YCG (m) | 0 | 0 | 0 | |||
| ZCG (m) | 0.31969 | 0.4359 | 0.3323 | |||
| (kgm2) | 256.046 | 253.823 | 273.822 | 274.264 | 563.358 | 562.773 |
| (kgm2) | 3044.54 | 3018.107 | 5457.232 | 5466.042 | 8519.915 | 8511.070 |
| (kgm2) | 3044.54 | 3018.107 | 5457.232 | 5466.042 | 8519.915 | 8511.070 |
| CT × 103 | S1 | S2 | S3 | rG | RG | ε12%S1 | pG/pG,th | UG%S1 | UD%D | Uv% | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Without correction | Value | 4.808 | 5.204 | 5.272 | 1.414 | 5.873 | |||||
| E%D | −5.26 | −13.93 | −15.40 | - | |||||||
| LCGM correction | Value | 4.677 | 4.981 | 5.493 | 1.414 | 0.593 | −6.497 | 0.753 | 9.48 | 1.0 | 12.18 |
| E%D | −2.38 | −9.02 | −20.24 | Verified | Validated | ||||||
| Case | Type | Sinkage | Trim | ||
|---|---|---|---|---|---|
| 100σ/L | E%D | τ° | E%D | ||
| Experimental values (D) | −0.116 | −0.13 | |||
| Fine grid (S1) | Without correction | −0.153 | −32.0 | −0.230 | −76.6 |
| LCGM correction | −0.094 | 18.6 | −0.127 | 2.49 | |
| Medium grid (S2) | Without correction | −0.104 | 10.5 | −0.337 | −159 |
| LCGM correction | −0.095 | 18.2 | −0.1296 | 0.26 | |
| Coarse grid (S3) | Without correction | −0.169 | −45.8 | −0.233 | −79 |
| LCGM correction | −0.11 | 4.99 | −0.131 | −0.86 | |
| CT × 103 | S1 | S2 | S3 | rG | RG | ε12%S1 | UG%S1 | UD%D | Uv% |
|---|---|---|---|---|---|---|---|---|---|
| Value | 3.697 | 3.691 | 4.056 | 1.414 | −0.019 | −0.18 | 4.93 | 1.0 | 5.03 |
| E%D | 0.36 | 0.55 | −9.30 | Verified | Validated |
| Parameters | EFD (D) | S1 (Without Correction) | S1 | S2 | S3 | |
|---|---|---|---|---|---|---|
| (LCGM Correction *) | ||||||
| CT × 103 | Value | 3.711 | 3.69383 | 3.69748 | 3.691 | 4.056 |
| E%D | 0.46% | 0.36% | 0.55% | −9.30% | ||
| σ × 102 (m) | Value | −1.394 | −1.364 | −1.40694 | −1.40688 | −1.343 |
| E%D | 2.14% | −0.93% | −0.92% | 3.64% | ||
| τ° | Value | −0.169 | −0.16617 | −0.16876 | −0.166 | −0.153 |
| E%D | 1.68% | 0.14% | 1.63% | 9.55% | ||
| CT × 103 | S1 | S2 | S3 | rG | RG | ε12%S1 | pG/pG,th | UG%S1 | UD%D | Uv% |
|---|---|---|---|---|---|---|---|---|---|---|
| Value | 4.505 | 4.712 | 4.974 | 1.414 | 0.79 | 4.59 | 0.340 | 21.62 | 1.0 | 22.73 |
| E%D | −5.04 | −9.86 | −15.97 | Verified | Validated |
| Parameters | D | S1 ††† | S2 (Without Correction) | S2 ††† | S3 ††† | |
|---|---|---|---|---|---|---|
| CT ×103 | Value | 4.289 | 4.505 | 4.719 | 4.712 | 4.974 |
| E%D | −5.04% | −10.03% | −9.86% | −15.97% | ||
| † CF ×103 | Value | 3.159 | 3.093 | 3.111 | 3.108 | 3.087 |
| E%D | 2.08% | 1.51% | 1.62% | 2.26% | ||
| †† CP ×103 | Value | 1.130 | 1.412 | 1.608 | 1.6048 | 1.886 |
| E%D | −24.92% | −42.29% | −41.99% | −66.88% | ||
| σ [%LPP] | Value | −0.086 | −0.0855 | −0.0912 | −0.0853 | −0.0781 |
| E%D | 0.56% | −6.10% | 0.78% | 9.19% | ||
| τ [%LPP] | Value | −0.180 | −0.188 | −0.197 | −0.1908 | −0.176 |
| E%D | −4.33% | −9.60% | −5.97% | 2.38% | ||
| Ship Model | Mesh Type | Execution Time | Total Iterations | Sec per Iteration | Used Processors | CPU | Threads | ||
|---|---|---|---|---|---|---|---|---|---|
| Case | Sec | Days | |||||||
| JBC | Static mesh | S1 | 213,727 | 2.47 | 8022 | 26.64 | 24 | E5-2678v3 | 24 × 2 |
| S2 | 66,137.8 | 0.77 | 11,307 | 5.85 | 6 | i5-8500 | 6 | ||
| S3 | 84,185 | 0.97 | 24,928 | 3.38 | 4 | i5-8500 | 6 | ||
| Dynamic mesh | S1 | 684,757 | 7.93 | 38,907 | 17.60 | 36 | E5-2699v4 | 44 × 2 | |
| S2 | 399,110 | 4.62 | 24,500 | 16.29 | 11 | E5-2699v4 | 44 × 2 | ||
| S3 | 329,842 | 3.82 | 198,393 | 1.66 | 28 | E5-2690v4 | 44 × 2 | ||
| KCS | Static mesh | S1 | 50,195.8 | 0.58 | 20,000 | 2.51 | 12 | E5-2678v3 | 24 × 2 |
| S2 | 27,471.3 | 0.32 | 40,000 | 0.69 | 12 | E5-2678v3 | 24 × 2 | ||
| S3 | 39,268.9 | 0.45 | 30,000 | 1.31 | 12 | E5-2678v3 | 24 × 2 | ||
| Dynamic mesh | S1 | 174,994 | 2.03 | 30,020 | 5.83 | 33 | 2696v3 | 36 × 2 | |
| S2 | 64,542.5 | 0.75 | 30,000 | 2.15 | 24 | 2696v3 | 36 × 2 | ||
| S3 | 46,372.2 | 0.54 | 30,000 | 1.55 | 9 | 2696v3 | 36 × 2 | ||
| KVLCC2 | Static mesh | S1 | 76,136.2 | 0.88 | 9460 | 8.05 | 12 | 3950x | 32 |
| S2 | 27,298 | 0.32 | 13,000 | 2.10 | 12 | 3950x | 32 | ||
| S3 | 15,373.1 | 0.18 | 13,000 | 1.18 | 12 | 3950x | 32 | ||
| Dynamic mesh | S1 | 540,493 | 6.26 | 38,000 | 14.22 | 12 | 3950x | 32 | |
| S2 | 196,267 | 2.27 | 48,541 | 4.04 | 12 | 3950x | 32 | ||
| S3 | 57,240.7 | 0.66 | 70,256 | 0.81 | 12 | 3950x | 32 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, P.-C. A CFD-Based Correction for Ship Mass and Longitudinal Center of Gravity to Improve Resistance Simulation. Mathematics 2025, 13, 1788. https://doi.org/10.3390/math13111788
Wu P-C. A CFD-Based Correction for Ship Mass and Longitudinal Center of Gravity to Improve Resistance Simulation. Mathematics. 2025; 13(11):1788. https://doi.org/10.3390/math13111788
Chicago/Turabian StyleWu, Ping-Chen. 2025. "A CFD-Based Correction for Ship Mass and Longitudinal Center of Gravity to Improve Resistance Simulation" Mathematics 13, no. 11: 1788. https://doi.org/10.3390/math13111788
APA StyleWu, P.-C. (2025). A CFD-Based Correction for Ship Mass and Longitudinal Center of Gravity to Improve Resistance Simulation. Mathematics, 13(11), 1788. https://doi.org/10.3390/math13111788