1. Introduction
Many practical dynamical systems are described by sets of nonlinear equations. Nonlinear systems commonly arise in applications such as robotics, mechatronics, biology, and electrical engineering. The analysis and control of nonlinear systems are generally more complex than those of linear systems.
Various methods have been developed to control nonlinear systems under external disturbances, including robust adaptive control, feedback control, backstepping control, and sliding mode control, among others [
1,
2,
3,
4]. For instance, there exist many algorithms based on high-gain feedback control [
5,
6]. However, methods utilizing high-gain feedback may result in the amplification of undesirable measurement noise. Furthermore, the question remains open regarding the impact of time delays on systems with strong feedback, and the preservation of closed-loop system stability under high-gain conditions.
Disturbance compensation can also be achieved through methods based on sliding mode control [
7,
8,
9,
10]. When a sliding mode occurs, the system acquires invariance properties with respect to parametric disturbances. However, the presence of sliding modes introduces oscillations and high-frequency switching in the control channel, which constitutes a major drawback of this control strategy.
The presence of delays in the control channel has a significant impact on the stability and performance of the system [
11]. Therefore, the control of nonlinear systems with delays in the control channel remains an active area of research. In recent years, the method of direct adaptive control with an internal model has been applied to disturbed systems with input delay [
12,
13]. In this approach, the external disturbance is treated as the output of an autonomous dynamic model (disturbance generator), the structure of which must be replicated within the control algorithm. The parameters of the control algorithm are tuned to achieve the desired closed-loop performance without identifying the disturbance parameters. However, a limitation of this method is that the disturbance must be representable as the output of an autonomous dynamic model, and the number of harmonics in the signal must be known in advance.
A common approach for the design of control with input delay is to develop a block known as a predictor, which aims to forecast the future state of the system. This method gained popularity after O. Smith published his work [
14], in which he proposed a compensator based on a predictor for stable linear systems with known delays. Many modifications of Smith’s predictor and its applications have been discussed in references such as [
15]. A. Manitius and A. Olbrot introduced a proportional–integral predictor for unstable systems in [
16], constructed by solving the system equations. However, subsequent studies referenced in [
17,
18,
19] indicated that the numerical implementation of the predictor proposed in [
16] could only stabilize a specific class of unstable systems with delays.
In [
20], a new predictor is introduced to design of a control law for unstable systems. Unlike the predictor in [
16], the predictor proposed in [
20] does not contain an integral component, simplifying both the implementation process and the calculation of parameters. Furthermore, in [
21], a sub-predictor for the control variable is developed on the predictor from [
20]. This sub-predictor consists of several interconnected predictors. The sub-predictor enables more effective control predictions for systems with larger delays compared to the predictor method in [
20]. The applications of the predictor and the sub-predictor from [
20,
21] for systems with unknown external disturbances were further explored in [
22,
23]. However, the results presented in [
20,
21,
22,
23] are limited to linear systems.
The goal of this paper is to extend the results from [
22,
23] by designing a control law for reference model tracking (or system state stabilization) in nonlinear systems with input delay, subject to unknown external disturbances. This paper is organized as follows.
Section 2 formulates the control problem.
Section 3 presents the design methodology for the state and disturbance sub-predictors and provides sufficient conditions for the stability of the closed-loop system in the form of linear matrix inequalities (LMIs).
Section 4 presents the numerical results and simulation studies for a real-world application with given parameters.
Notation. is the n-dimensional Euclidean space with the vector norm ; represents the set of all real matrices of size ; denotes a column vector; I, 0, and denote the identity matrix, zero matrix, and diagonal matrix (of the corresponding dimension), respectively; denotes the block diagonal matrix of matrices ; represents the pseudo-inverse matrix of A; denotes the differential operator; denotes the r-th derivative of the signal ; ; means that ; and finally, symmetric elements of a symmetric matrix are denoted by ★.
2. Problem Statement
Consider a nonlinear system with a delay in the input
and a reference model
where
is a measured state vector,
is the control signal,
is the external bounded disturbance,
is the known time delay,
is the known nonlinearity function,
is the state vector of the reference model,
is the unknown bounded reference signal, and
and
are the initial conditions. The matrices
A,
B,
G, and
are known while the matrix
F is unknown, with corresponding dimensions.
For systems (
1) and (
2), we consider the following assumptions.
Assumption 1. The function is globally Lipschitz, that is, there exists a coefficient such that for any , the following condition is satisfied [4]: Assumption 2. The pair is controllable and the input matrix B has full collum rank.
Assumption 3. The disturbance and the reference signal are unknown with bounded derivatives, where is a parameter used in the control law design. Moreover, the disturbance and reference signal satisfy the conditions and , respectively.
Assumption 4. There exist some matrices and such that the following matching conditions hold [24]: Remark 1. By Assumption 1, if the function is globally Lipschitz, it also satisfies the sector constraint, i.e., ,. Assumption 2 guarantees the existence of the pseudo-inverse matrix of the matrix B, which is required for estimating the unknown disturbance, as discussed in [22,23]. The boundedness of the derivatives of and in Assumption 3 is necessary for the design of the disturbance sub-predictor proposed in [22,23]. Assumption 4 represents a standard condition commonly used in control problems. The matching condition (4) is needed for the above state matching. Such state matching or tracking, stronger than output matching or tracking, is possible only under certain plant–model structure matching, which is characterized by the condition (4) [25]. Let
be the tracking error. From (
1), (
2), and (
4) we obtain the dynamic error as follows:
where
is the new disturbance with bounded
derivatives, and
is the initial condition of the error model.
The goal is to design a control law to ensure the following condition:
where
, with
as the order of the disturbance sub-predictor that is defined below.
3. Main Results
Following [
23], we design a control law consisting of
to stabilize the error model (
5) by considering
and
to compensate for the disturbances
when
. Thus, the control law can be represented as follows:
To stabilize the tracking error
, the control signal
requires the use of the value
. However, this cannot be implemented in practice since future values are not accessible. Therefore, in
Section 3.1, we propose a state sub-predictor to predict the value of
and design the control signal
. The disturbance
is then estimated and approximated using a derivative estimation algorithm. We introduce the sub-predictor for predicting the disturbance estimation
, from which the compensation signal
is generated. In
Section 3.2, we provide sufficient conditions for the stability of the closed-loop system in the form of solvable LMIs, using the Lyapunov–Krasovskii method and the S-procedure [
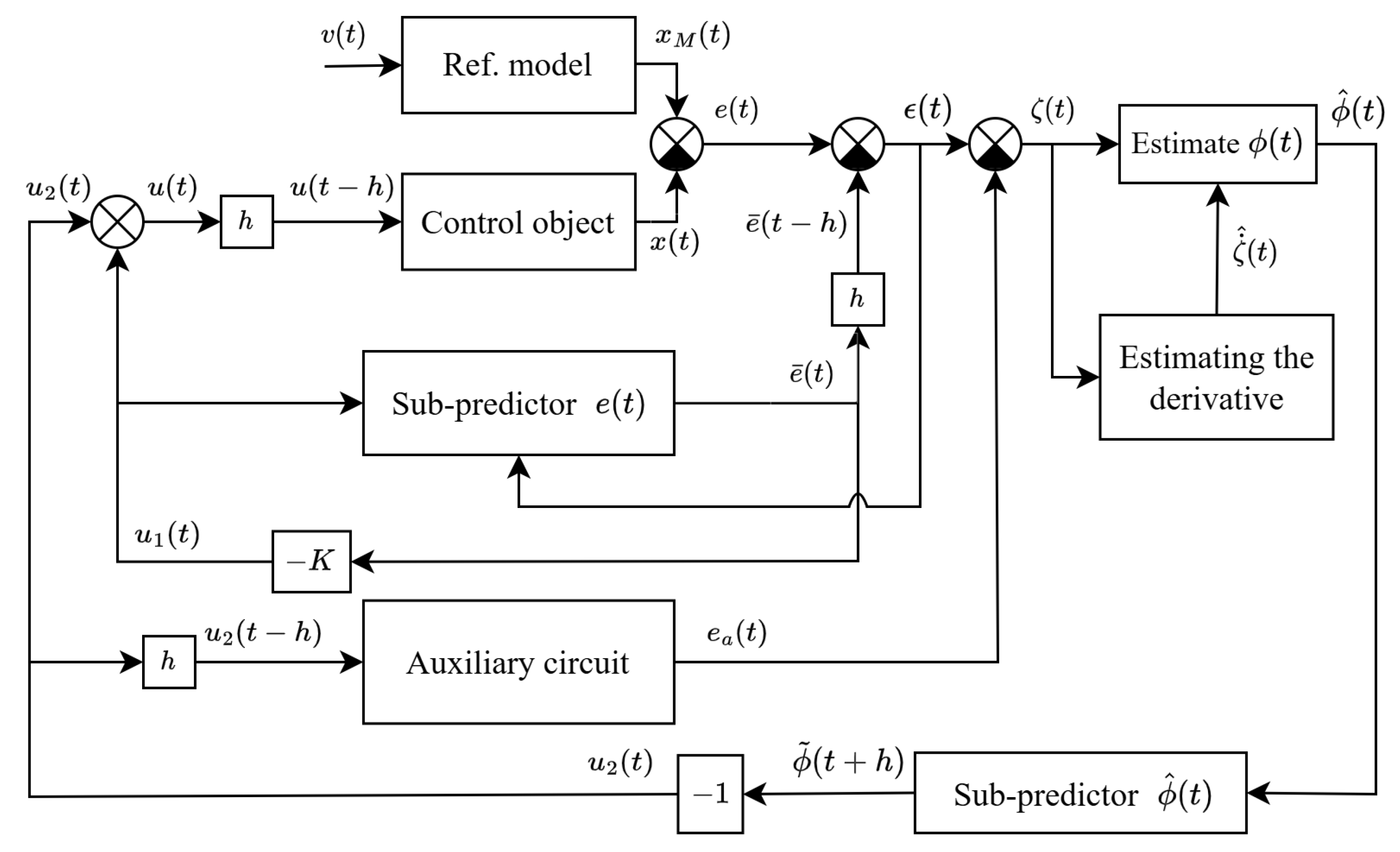
26]. The proposed control scheme is depicted in
Figure 1.
3.1. Design of the State Sub-Predictor and Disturbance Sub-Predictor
We introduce a state sub-predictor for the system (
5) as follows:
where
, and
. The integer
is selected by the designer, and the matrices
must be chosen such that the solutions of the following system are ultimately bounded:
where
. The conditions for selecting the matrices
in the form of an LMI are presented in Proposition 1.
Proposition 1. If, for given matrices , there exist positive definite matrices , such that the following LMI is feasible:then . Proof. The proof of Proposition 1 is provided in Section 3.6.2 [
26]. □
Remark 2. Finding the matrices that satisfy the condition of Proposition 1 can be challenging in practice, particularly when the matrix A has a large dimension. Instead of defining the matrices directly and verifying the feasibility of LMI (10), one can assume as known matrices, for example, , and then solve LMI (10) for . The resulting matrices can then be used in the sub-predictor (8). Remark 3. By incrementally increasing the value of and solving the LMI (10), one can determine the maximum value for which LMI (10) admits a feasible solution for . Based on this value, for a given input delay h, the required order q of the state sub-predictor can be determined as . We introduce the following prediction errors:
By differentiating (
11) with respect to the solutions obtained from Equations (
5) and (
8), we obtain
To design the control signal
, we assume that
and
. From Equation (
11), we observe that
.
Thus, if system (
12) is asymptotically stable, it follows that
. Therefore, the control signal
is defined to ensure the stability of the closed-loop system in the following form:
where the matrix
K is selected such that the matrix
is Hurwitz.
However, in the presence of disturbances, we have . Therefore, it is essential to design the control signal to reduce the influence of disturbances on the prediction errors , for .
To achieve this, we introduce an auxiliary loop as follows:
where
.
Let
. From Equations (
12) and (
14), we obtain
From Equation (
15), we derive the following equation for estimating the disturbance:
where the signal
is defined by the equation
Here,
and
are
i-th element of the vectors
and
, respectively. The parameter
is a small positive number.
To predict the disturbance
, we apply the method described in [
22,
23] as follows:
Here,
,
is an integer chosen by the designer and
represents the remaining part of the expansion. However, the value
alone is not sufficient to fully compensate for the disturbance. Therefore, we shift the argument of the function
in Equation (
16) to the right by
, successively,
M times. The resulting expression takes the following form:
From Equation (
19), the prediction time is given by
for disturbance, indicating that the prediction time in (
19) is reduced by a factor of
M compared to the system delay. The system (
19) is referred to as the disturbance sub-predictor, and
M is the order of the disturbance sub-predictor.
After determining the predicted disturbance signal, we construct a control law for disturbance compensation in the following form:
Thus, we have developed a new control scheme that utilizes sub-predictors, including the control law (
7), the sub-predictor of the controlled variable (
8), the auxiliary feedback loop (
14), and the disturbance sub-predictor (
19). In the next subsection, we will analyze the closed-loop system to obtain the sufficient stability conditions.
3.2. Stability Analysis of the Closed-Loop System
Consider the estimation error
. Taking into account Equation (
17), we obtain the derivative of
as
Differentiating Equation (
15) twice and denoting
, we obtain
Since the signal
is bounded and the matrix
is chosen such that the solutions of Equation (
9) are ultimately bounded, the signal
is also ultimately bounded. The new variables
and
are then introduced. By differentiating the functions
and
times, we obtain
Since the signal
is bounded, the signal
is ultimately bounded as well. Let us rewrite Equation (
15) as
. Considering Equations (
16), (
18)–(
20), we derive the following relation:
Considering the structure of the disturbance sub-predictor in (
18) and (
19), the errors
can be defined in the following form:
Consequently, Equation (
24) can be reformulated as follows:
The system described in Equation (
12) can be rewritten in the following form:
Since is bounded as shown earlier, we now aim to demonstrate that the signal is also bounded. To achieve this, we first show that the prediction error is bounded.
Differentiating Equation (
15) yields
Since is bounded, it follows that is also bounded.
Next, Equation (
17) can be rewritten as
which, combined with the boundedness of
, implies that
is bounded.
Considering Equation (
16), and noting that both
and
are bounded, we conclude that
is also bounded. Furthermore, since
is bounded and Equation (
19) holds, it follows that
is bounded.
As a result, the prediction error is bounded, and consequently, the signal is also bounded.
We introduce a new variable
. From Equations (
1) and (
9), we obtain the derivative of
with respect to time as follows:
Since the solutions of Equations (
21)–(
23) are ultimately bounded, we now focus on studying the ISS of the closed-loop system by considering only Equations (
27), (
28), and (
2). To proceed, we define the following vectors and matrices:
Using the notations defined above, Equations (
2), (
27), and (
28) can be rewritten as follows:
By applying the Newton–Leibniz formula, (
29) can be rewritten as
Theorem 1. Consider the nonlinear system (1), the reference model (2), the sub-predictor for the controlled variable (8), the disturbance sub-predictor (19), and the control law (7). Suppose that for a given number and matrices K and , there exist coefficients and positive-definite matrices such that the following LMI is feasible:where Then, the solutions of the closed-loop system defined by (1), (2), (7), (8), (13), (14) and (16)–(20) are ultimately bounded. Moreover, the objective (6) holds with . Proof. Consider the Lyapunov–Krasovskii candidate function in the following form:
where
It is important to note that the component
enables us to derive the stability condition for the closed-loop system, which will explicitly depend on the delay (a delay-dependent condition, as outlined in [
26]. Based on Equation (
30), we proceed to derive the following expressions:
The first expression in (
33) is derived using the descriptor method from [
26]. By applying Jensen’s inequality [
26], we can estimate the last expression in (
33) as follows:
Considering the Lipschitz condition of function
, we obtain
By defining
and applying the S-procedure, we present the following expression for studying the ISS properties:
If the condition (
31) holds, then
, which implies that
for all
where the Lipschitz condition of function
is satisfied. Consequently,
is ultimately bounded.
Consider the control objective (
6). Based on Equations (
7) and (
24), we can rewrite Equation (
5) as
. If
, then according to (
36), we obtain the exponential stable closed-loop system. Denote
. Taking into account (
21) and (
26), we have
As a result, the proposed algorithm provides objective (
6) with the accuracy
.
We now show that
. Indeed, taking into account (
25) and (
18), we obtain
According to (
15)–(
17) and (
21)–(
23), the expression for
can be written as
Since
as
, we obtain
Theorem 1 is proved. □
Remark 4. We now demonstrate the boundedness of all signals in the closed-loop system. Since is bounded, it follows that , , and are also bounded. From Equation (11), it can be concluded that the state of the sub-predictor (8) is bounded as well. As a result, the control signal remains bounded. Moreover, because is bounded, is bounded as well. Therefore, all signals in the closed-loop system remain bounded. 4. Numerical Example
Let us consider the model of a single link robot with a flexible joint rotating in a vertical plane with the following parameters [
27]:
where
;
and
are the link displacement [m] and velocity [m/s], respectively;
and
are the rotor displacement [rad] and angular velocity [rad/s], respectively. The parameters
and
g are the link inertia, the rotor inertia, the elastic constant, the position of the center of mass, and the gravity acceleration, respectively. These parameters are given as
. The Lipschitz constant is assumed to be equal to 0.3691.
Consider the disturbance
in the following form:
where
is the saturation function,
is the signal modeled in the Matlab Simulink environment (latest v. R2025a) using the “Band-Limited White Noise” block with a noise power of
and a sample time of
.
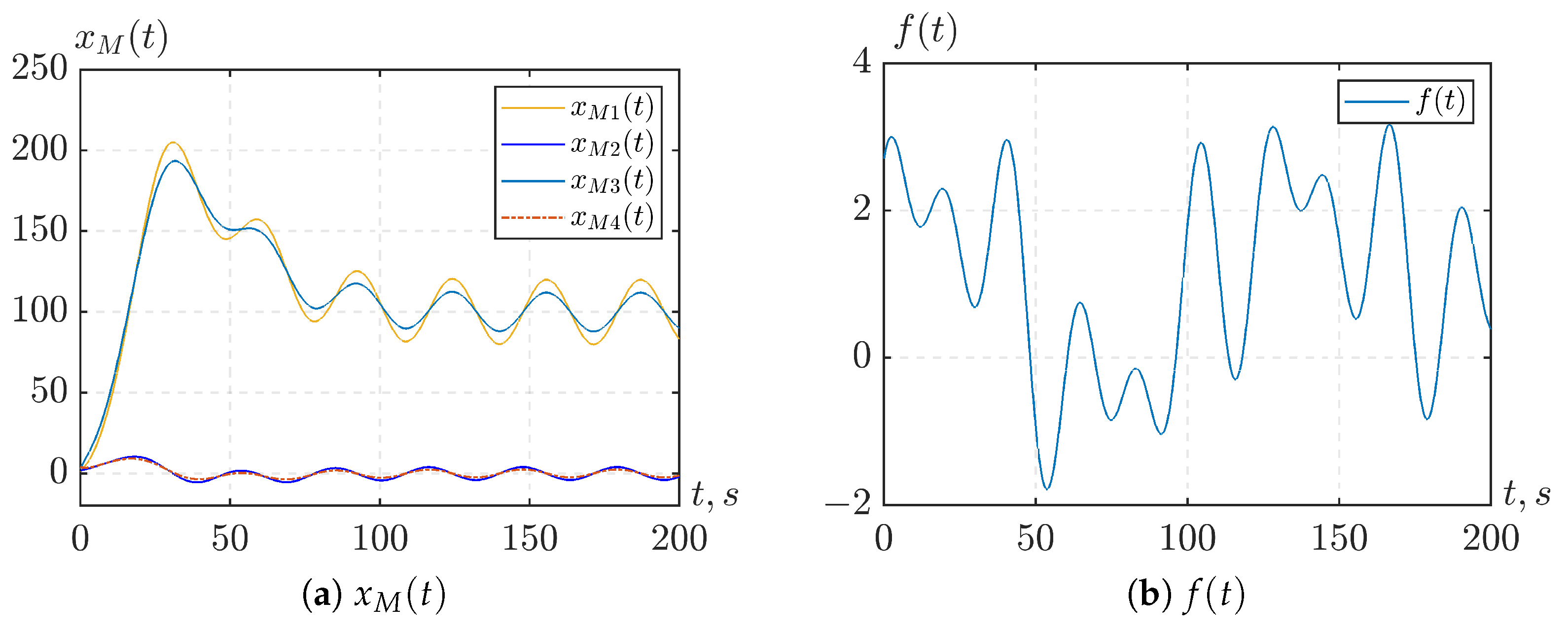
The matrix
of the reference model is given by
, where
is computed using the MATLAB command
. The reference signal is given by
. The graphs of the state of the reference model
and the disturbance
are illustrated in
Figure 2.
Let us select
for the state sub-predictor. Let
; it is shown that the LMI in Equation (
10) is solvable for the variables
,
,
P,
R, and
S when
s. For
s, we obtain
Since the LMI (
10) is convex with respect to
, the system (
1) remains stable for
, which means
when using the found matrix
[
26]. Using the command
acker in MATLAB to calculate the gain
K such that the eigenvalues of the closed-loop system are
, we obtain
. Checking the feasibility of the LMI (
31), we find that (
31) is feasible for
s.
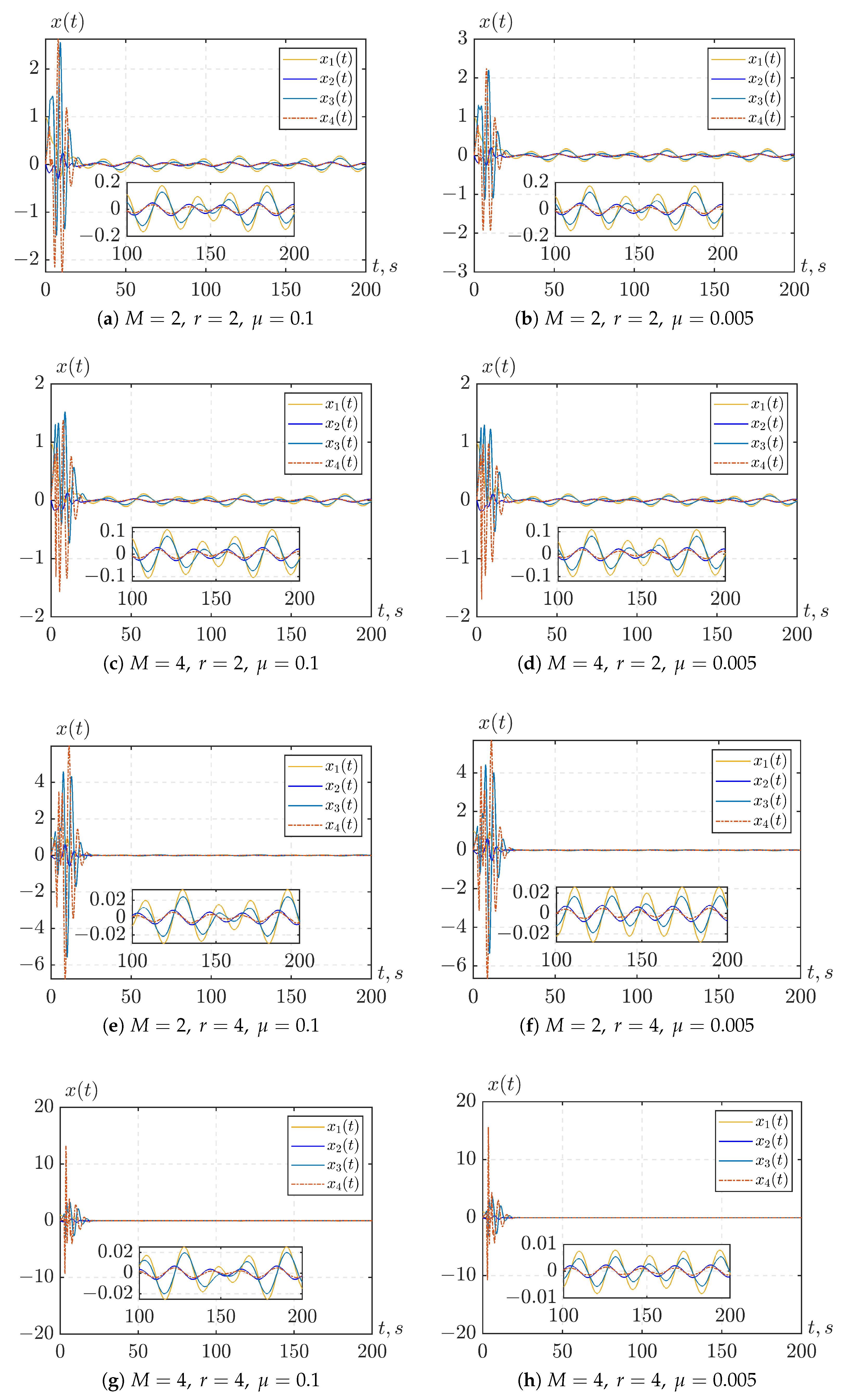
To illustrate the control performance, we consider the simulation results where the parameters M, r, and are selected from the set .
Figure 3 illustrates the case of stabilization of the system state vector
when the input to the reference model is identically zero, i.e.,
, and the time delay is set to
s. From the graphs, we can make the following observations:
All controlled signals are ultimately bounded with some bound .
The bound decreases as either M or r increases, or as both increase simultaneously. This is consistent with the conclusion above that the magnitude of depends on .
For example, in the case of a given disturbance
whose higher-order derivatives decrease in magnitude (see Assumption 3), increasing
M from 2 to 4 (with fixed
r) reduces
by approximately a factor of 2, except for the case with
and
(see
Figure 3e,g), which will be discussed below. On the other hand, when
M is fixed and
r is increased from 2 to 4,
decreases by approximately a factor of 10. In the case with
, the reduction is less significant, with
decreasing by approximately a factor of 5 (see
Figure 3c,g).
However, increasing
M or
r to reduce
may lead to a larger overshoot in the controlled signals, especially when increasing
M with a large
r (see
Figure 3e–h). This behavior can be explained by the structure of the disturbance sub-predictor, which contains coefficients dependent on
M and
r. When both
M and
r are large, the disturbance sub-predictor may produce large transient prediction errors, which in turn cause significant overshoots in the controlled signals.
A smaller value of
(e.g.,
) provides better control performance compared to a larger value (e.g.,
). This explains why, for
, increasing
M does not reduce
when
is selected (see
Figure 3e,g). A similar pattern is observed in
Figure 3c,g, where increasing
r results in a smaller reduction in
compared to the case with a smaller
.
When
is used, increasing either
M or
r leads to a significant reduction in
. This is because the “dirty derivative” filters in (
17) yield a more accurate derivative estimation when
is smaller.
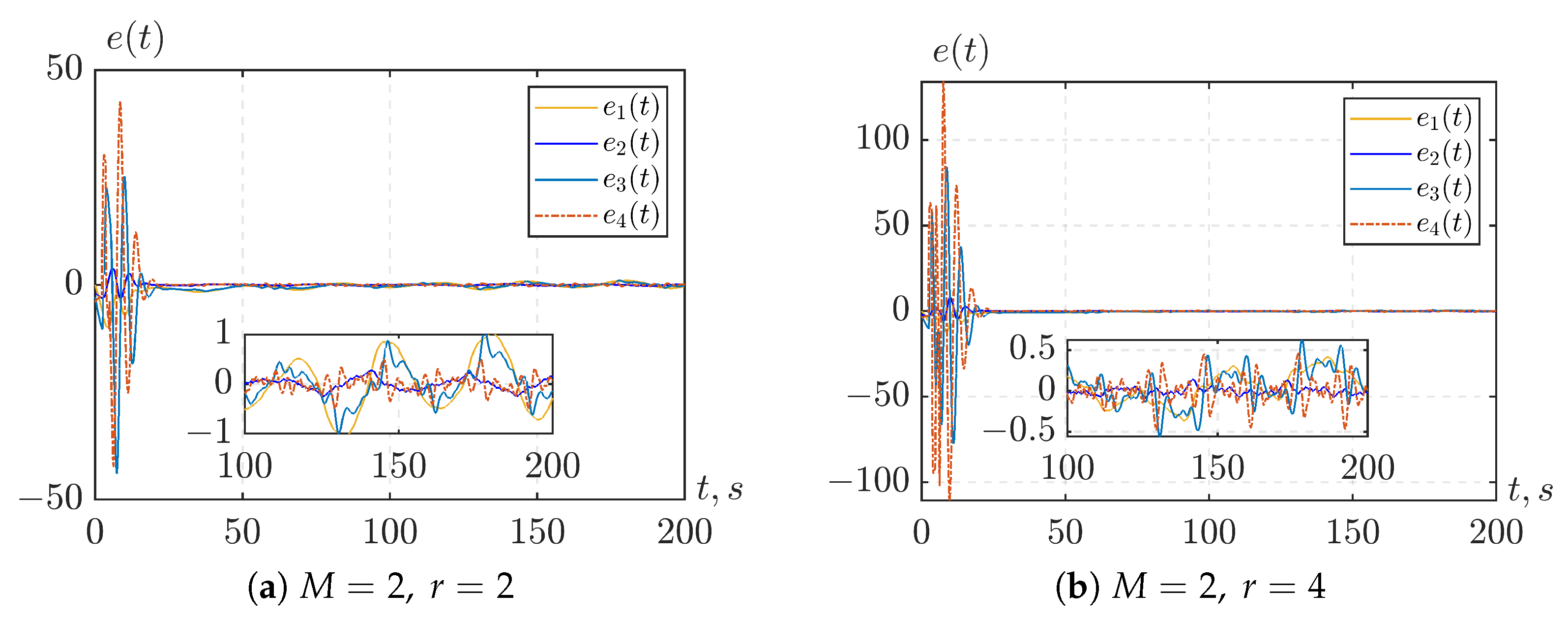
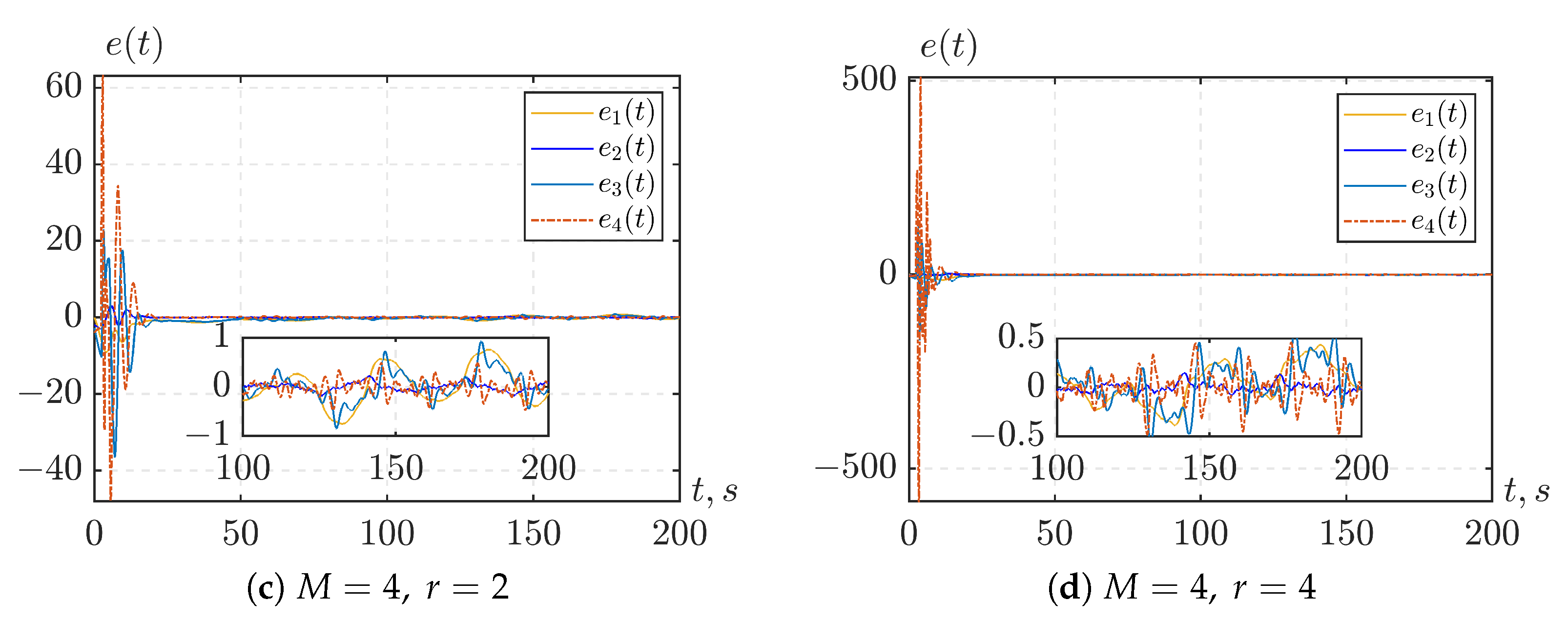
Figure 4 illustrates the case of stabilization of the tracking error
when the time delay is set to
s and
. From the graphs, we observe that increasing the value of
M can reduce
; however, the effect is not as significant as when increasing the value of
r. This can be explained by the fact that the bound
depends on the magnitude of the disturbance
, which is a function of
,
, and
, and these terms can attain large values. However, increasing both
r and
M leads to large peak values during the transient regime, as previously observed in the case of system state stabilization.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}