

Exact Solutions for Strong Nonlinear Oscillators with Linear Damping


Abstract
1. Introduction
2. Preliminary
3. Exact Analytic Solution of a Linearly Damped Nonlinear Oscillator
3.1. Exact Solution
3.2. Amplitude of Vibration Under Damping
3.3. Exact Period of Vibration
3.4. First Integral for the Integrable Equation
3.5. Example 1: Oscillators of Order of Nonlinearity α = 1.1; 3; 7
4. Approximate Solution for Almost-Exact Strong Nonlinear Oscillator with Linear Damping
Example 2: Oscillators with Orders of Nonlinearity of α = 1.1; 3; and 7 and Various Damping Coefficients
5. Purely Nonlinear Damped Oscillators
Example 3: Pure Cubic Oscillator with Linear Damping
6. Discussion
7. Conclusions
- The strong nonlinear oscillator with linear damping has the exact solution for , where is the damping coefficient, is the coefficient of linear stiffness, and and are the orders of the equation’s nonlinearity (an integer or non-integer).
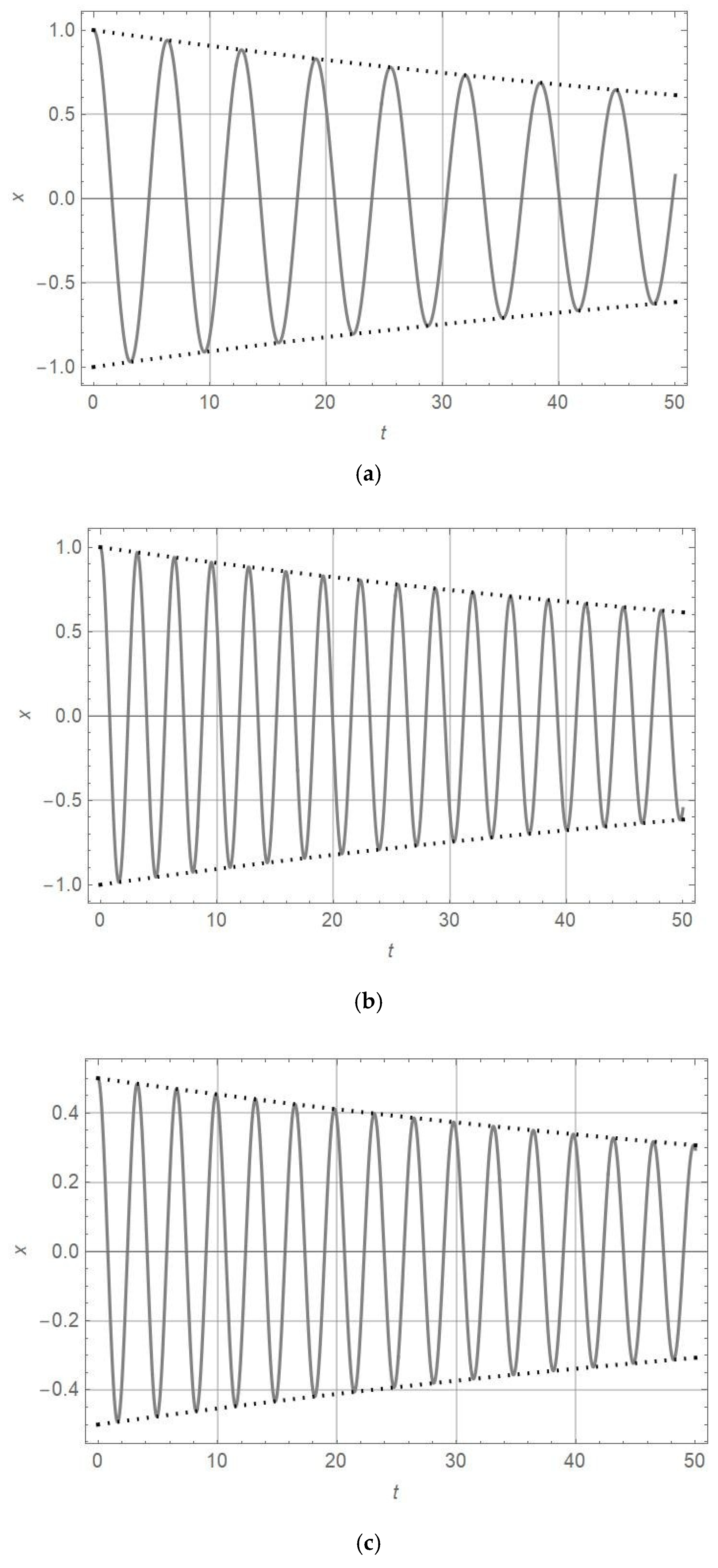
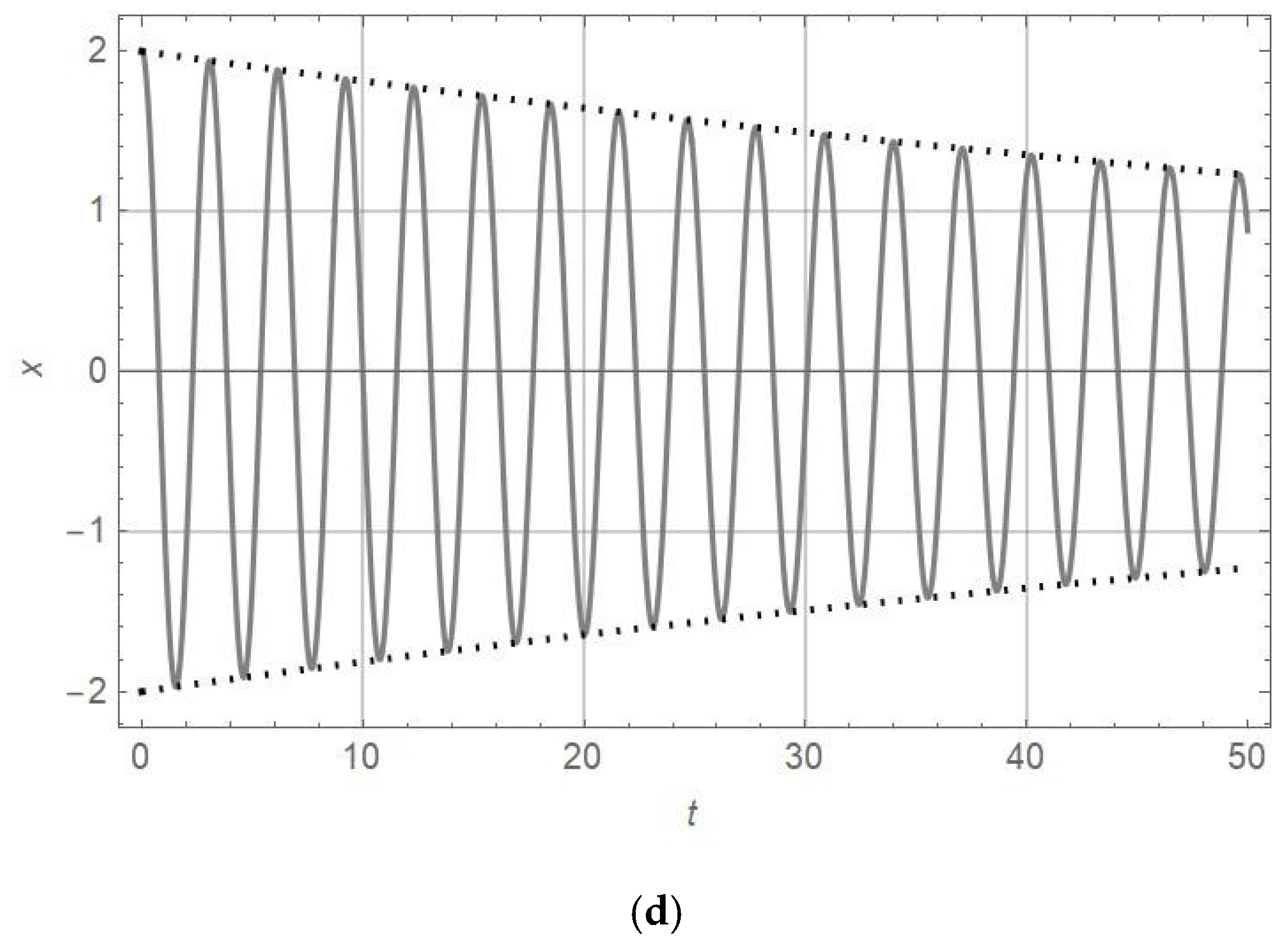
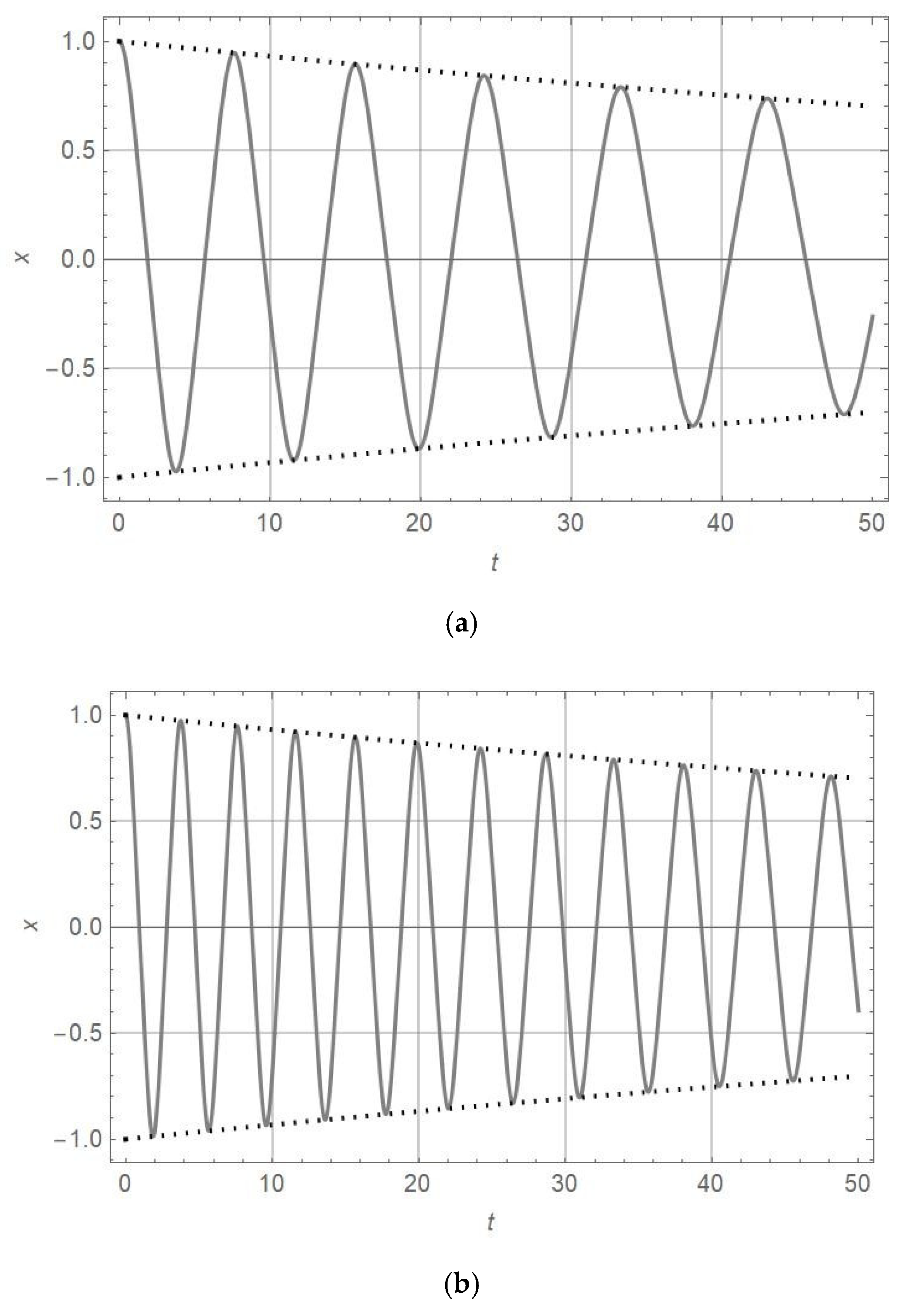
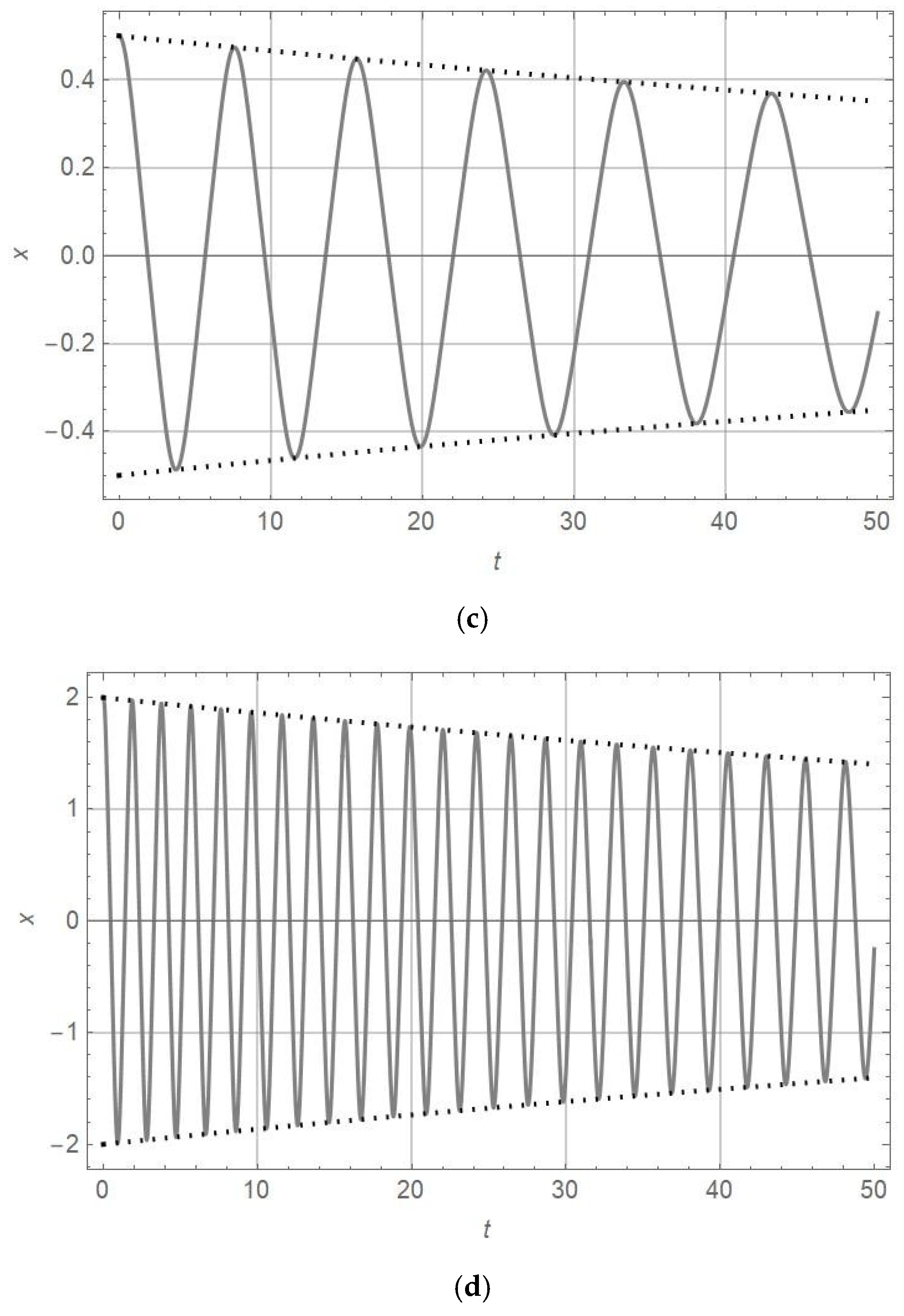
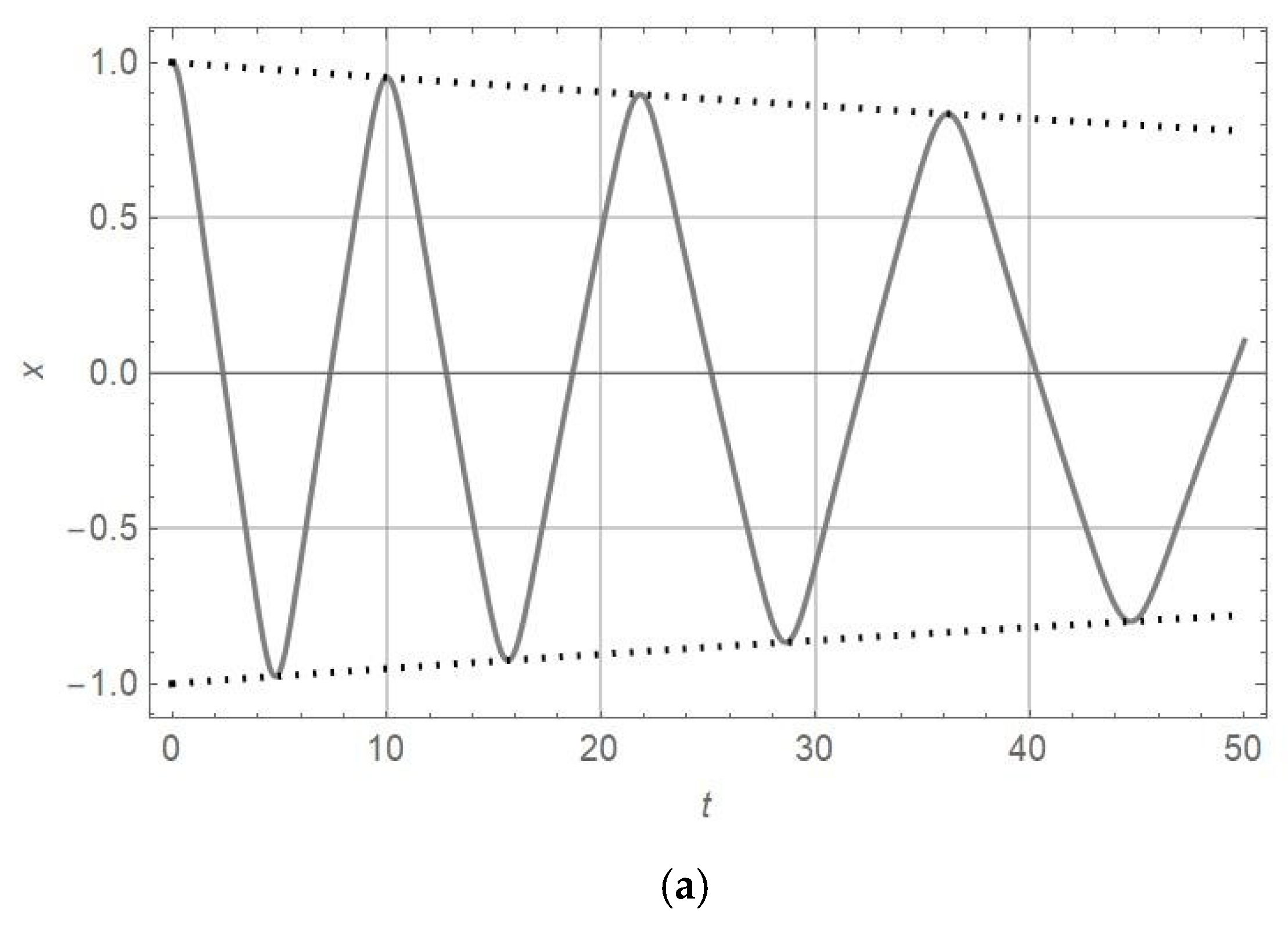
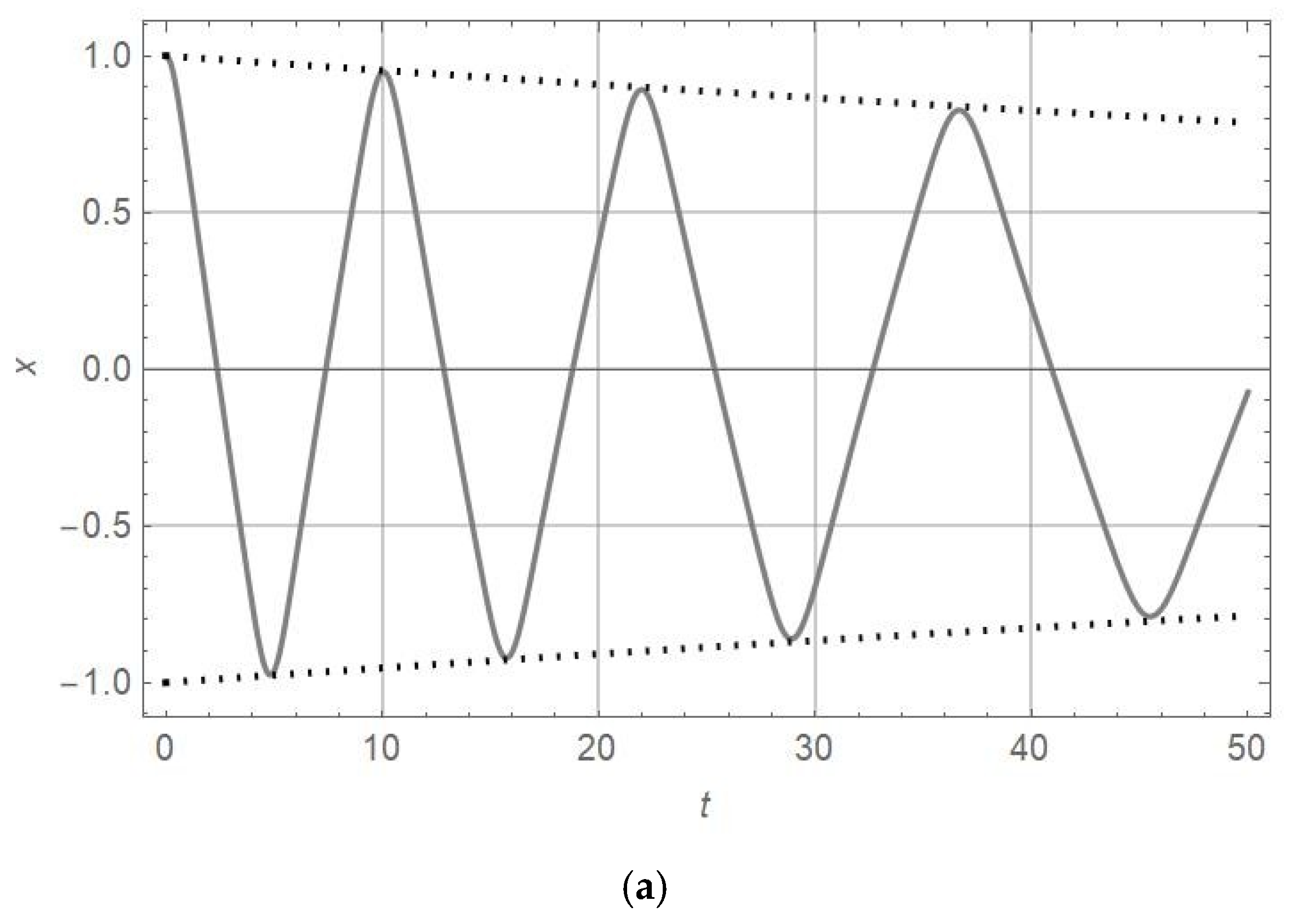
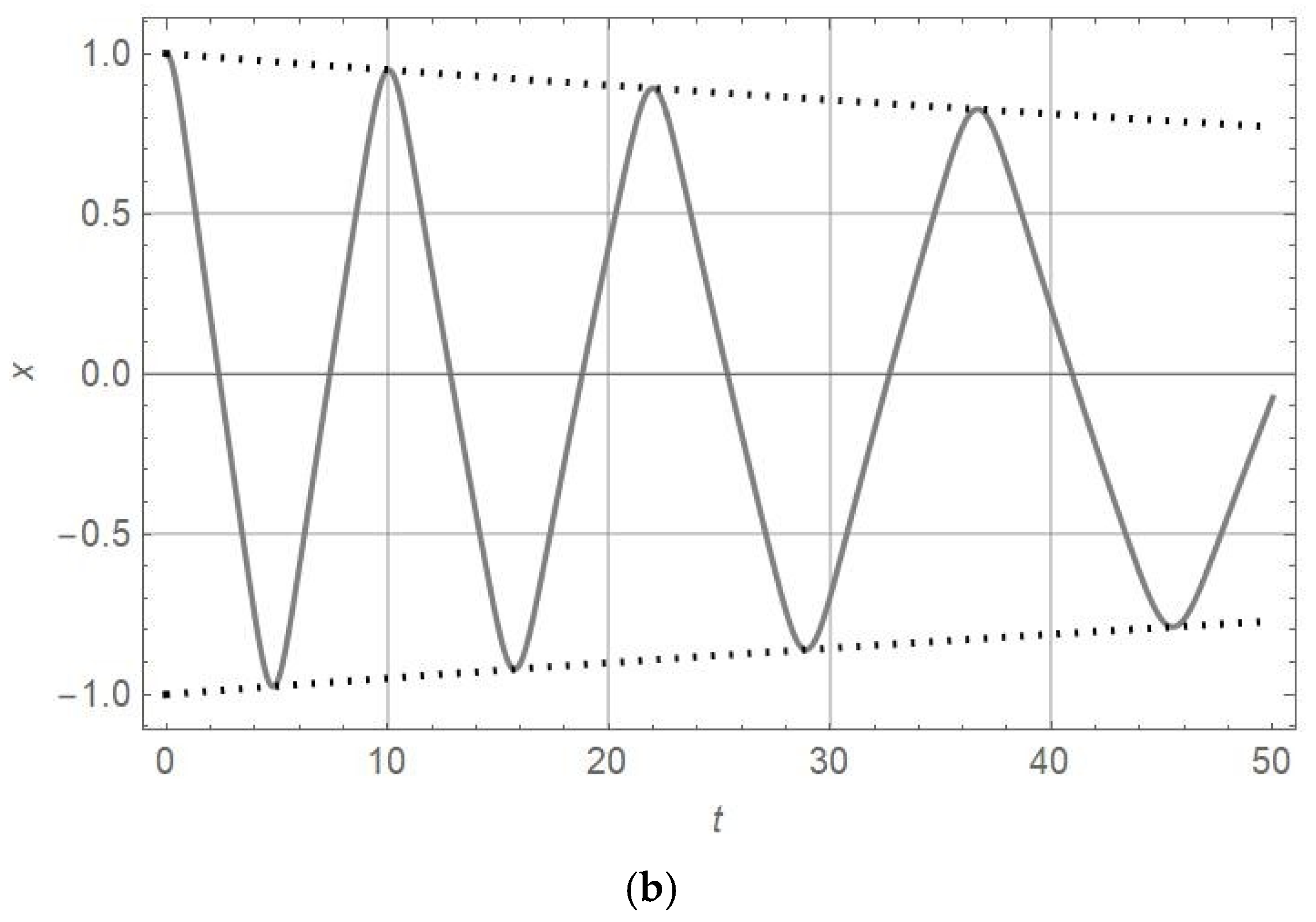
- The motion of the strong nonlinear oscillator with linear damping is influenced by time-decaying amplitudes and also by time-variable periods.
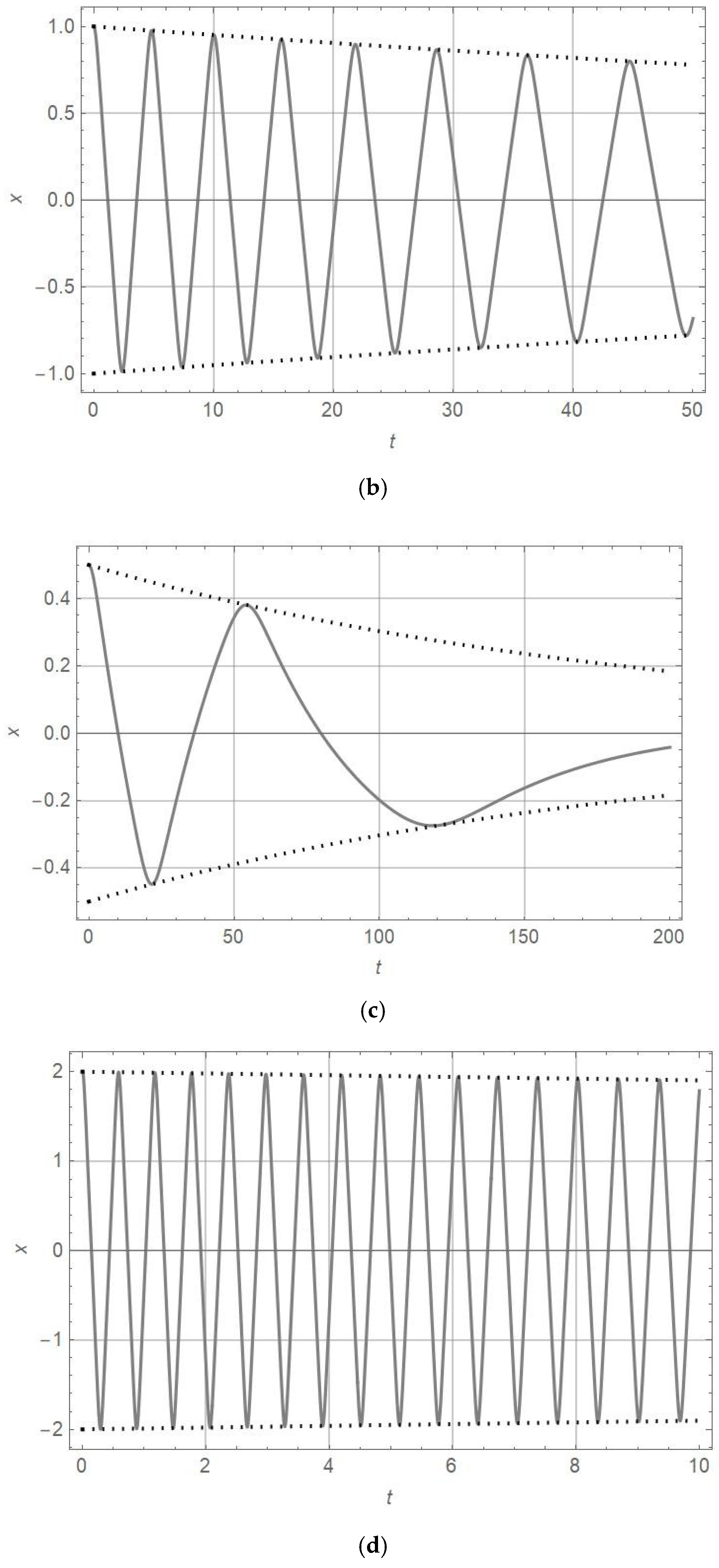
- The amplitude time decrease is the function of the initial amplitude, the damping coefficient, and the order of nonlinearity, but it is independent of the coefficient of stiffness. The amplitude damping is the fastest for the linear oscillator and is slower for oscillators with higher orders of nonlinearity. If the order of nonlinearity tends to infinity, then the amplitude tends to the constant initial amplitude. In addition, independently of the order of nonlinearity, the amplitude decay is faster for higher damping coefficients and smaller initial amplitudes.
- The vibration varies with increasing time periods. The period increase is faster for oscillators with a higher order of nonlinearity and is zero for the linear damped oscillator. When comparing the first periods of vibration for damped oscillators with various orders of nonlinearity, it is obtained that the period of vibration is longer for higher orders of nonlinearity than for lower ones.
- The first integral for the nonlinear oscillator with linear damping and certain parameter values is determined. The first integral is available for the derivation of the exact solution. Using the integral, the initial amplitude and phase shift for the initial deflection and velocity are obtained.
- The approximate solution, which is the perturbed version of the exact solution, is the appropriate one for oscillators with damping coefficient variations up to 20%.
- The damped pure nonlinear oscillator has no exact solution even in the form of the Ateb function. The approximate solution, based on the exact solution of the undamped oscillator, is convenient for application.
- In the damped pure nonlinear oscillator with small initial amplitudes, the amplitude decay is faster, and the period of vibration is longer with a greater tendency to increase compared to the oscillator with a higher initial amplitude.
- The amplitude–time function for the damped pure nonlinear oscillator and for the strong nonlinear oscillator is equal if both oscillators have the same order of nonlinearity, damping coefficient, and initial amplitudes of vibration.
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Averaging the Ateb Functions
References
- Cveticanin, L. Strong Nonlinear Oscillators—Analytical Solutions, 2nd ed.; Mathematical Engineering; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Panayotounakanos, D.E.; Panayotounakou, N.D.; Vakakis, A.V. On the solution of the unforced damped Duffing oscillator with no linear stiffness term. Nonlinear Dyn. 2002, 28, 1–16. [Google Scholar] [CrossRef]
- Bakhtiari-Nejad, F.; Nazari, M. Nonlinear vibration analysis of isotropic cantilever plate with viscoelastic laminate. Nonlinear Dyn. 2009, 56, 325–356. [Google Scholar] [CrossRef]
- Wang, Y.R.; Feng, C.K.; Chen, S.Y. Damping effects of linear and nonlinear tuned mass dampers on nonlinear hinged-hinged beam. J. Sound Vib. 2018, 430, 150–173. [Google Scholar] [CrossRef]
- Baumann, B.; Schwieger, J.; Wol, M.; Manders, F.; Suijker, J. Nonlinear behavior in high-intensity discharge lamps. J. Phys. D Appl. Phys. 2015, 49, 255201. [Google Scholar] [CrossRef]
- Salas, A.H.; El-Tantawy, S.A. On the approximate solutions to a damped harmonic oscillator with higher-order nonlinearities and its application to plasma physics: Semi-analytical solution and moving boundary method. Eur. Phys. J. Plus 2020, 135, 833–917. [Google Scholar] [CrossRef]
- Hammad, A.M.; Salas, A.H.; El-Tantawy, S.A. New method for solving strong conservative odd parity nonlinear oscillators: Applications to plasma physics and rigid rotator. AIP Adv. 2020, 10, 085001. [Google Scholar] [CrossRef]
- Younesian, D.; Askari, H.; Saadatania, Z.; Yazdi, M.K. Periodic solutions for nonlinear oscillation of a centrifugal governor system using the He’s frequency–amplitude formulation and He’s energy balance method. Nonlinear Sci. Lett. A 2011, 2, 143–148. [Google Scholar]
- Salas, A.H.; El-Tantawy, S.A. Analytical solutions of some strong nonlinear oscillators. In Engineering Problems—Uncertainties, Constraints and Optimization Techniques; Tsuzuki, M.S.G., Takimoto, R.Y., Sato, A.K., Saka, T., Barari, A., Rahman, R.O.A., Hung, Y.-T., Eds.; IntechOpen: London, UK, 2019; 25p. [Google Scholar] [CrossRef]
- Kontomaris, S.V.; Mazi, I.; Chiliveros, G.; Malamou, A. Generic numerical and analytical methods for solving nonlinear oscillators. Phys. Scr. 2024, 99, 02523. [Google Scholar] [CrossRef]
- El-Shahed, M. Application of differential transform method to non-linear oscillatory systems. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 1714–1720. [Google Scholar] [CrossRef]
- Nourazar, S.; Mirzabeigy, A. Approximate solution for nonlinear Duffing oscillator with damping effect using the modified differential transform method. Sci. Iran. B 2013, 20, 364–368. [Google Scholar]
- Abdeljhafez, H.M. Solution of excited non-linear oscillators under damping effects using the modified differential transform method. Mathematics 2016, 4, 11. [Google Scholar] [CrossRef]
- Wu, B.S.; Sun, W.P. Construction of approximate analytical solutions to strongly nonlinear damped oscillators. Arch. Appl. Mech. 2011, 81, 1017–1030. [Google Scholar] [CrossRef]
- Razzak, M.A. An analytical approximate technique for solving cubic–quintic Duffing oscillator. Alex. Eng. J. 2016, 55, 2959–2965. [Google Scholar] [CrossRef]
- Mandal, S. Classical damped quartic anharmonic oscillator a simple analytical approach. Int. J. Non-Linear Mech. 2003, 38, 1095–1101. [Google Scholar] [CrossRef]
- Turkyilmazoglu, M. An effective approach for approximate analytical solutions of the damped Duffing equation. Phys. Scr. 2012, 86, 015301. [Google Scholar] [CrossRef]
- Cveticanin, L. Homotopy-perturbation method for pure non-linear differential equation. Chaos Solitons Fractals 2006, 30, 1221–1230. [Google Scholar] [CrossRef]
- Cveticanin, L. Oscillators with nonlinear elastic and damping forces. Comp. Math. Appl. 2011, 62, 1745–1757. [Google Scholar] [CrossRef]
- Jojannessen, K. The Duffing oscillator with damping. Eur. J. Phys. 2015, 36, 065020. [Google Scholar] [CrossRef]
- Johannessen, K. The Duffing oscillator with damping for a softening potential. Int. J. Appl. Comput. Math. 2017, 3, 3805–3816. [Google Scholar] [CrossRef]
- Johannessen, K. The solution to the differential equation with linear damping describing a physical systems governed by a cubic energy potential. arXiv 2018. [Google Scholar] [CrossRef]
- Cveticanin, L. On the truly nonlinear oscillator with positive and negative damping. Appl. Math. Comput. 2014, 243, 433–445. [Google Scholar] [CrossRef]
- Cveticanin, L.; Herisanu, N.; Ismail, G.M.; Zukovic, M. Vibration of the Liénard oscillator with quadratic damping and constant excitation. Mathematics 2025, 13, 937. [Google Scholar] [CrossRef]
- Panayotounakos, D.E.; Theotokoglou, E.E.; Markakis, M.P. Exact analytic solutions for the damped Duffing nonlinear oscillator. Comptes Rendus Méc. 2006, 334, 311–316. [Google Scholar] [CrossRef]
- Elias-Zuniga, A. Analytical solution of the damped Helmholtz–Duffing equation. Appl. Math. Lett. 2012, 25, 2349–2353. [Google Scholar] [CrossRef]
- Salas, A.H.; El-Tantawy, S.A.; Castillo, J.H. Analytical solution to the damped cubic-quintic Duffing equation. Int. J. Math. Comput. Sci. 2022, 17, 425–430. [Google Scholar]
- Almendrai, J.A.; Sanjuan, M.A.F. Integrability and symmetries for the Helmholtz oscillator with friction. J. Phys. A Math. Gen. 2003, 36, 695–710. [Google Scholar] [CrossRef]
- Zhu, J.-W. A new exact solution of a damped quadratic nonlinear oscillator. Appl. Math. Model. 2014, 38, 5986–5993. [Google Scholar] [CrossRef]
- Salas, A.H.; El-Tantawy, S.A.; Aljahdaly, N.H. An exact solution to the quadratic damping strong nonlinearity Duffing oscillator. Math. Probl. Eng. 2021, 15, 8875589. [Google Scholar] [CrossRef]
- Cveticanin, L.; Vujkov, S.; Cveticanin, D. Application of Ateb and Generalized trigonometric functions for nonlinear oscillators. Arch. Appl. Mech. 2020, 90, 2579–2587. [Google Scholar] [CrossRef]
- Gradsein, I.S.; Rjizhik, I.M. Table of Integrals, Series and Products; Academic Press: Moscow, Russia, 1971. (In Russian) [Google Scholar]
- Euler, N.; Steeb, W.-H.; Cyryus, K. On exact solutions for damped anharmonic oscillators. J. Phys. A Math. Gen. 1989, 22, L195–L199. [Google Scholar] [CrossRef]
- Koscielniak, S.R. Weakly Damped Anharmonic Oscillator; TRIUMF Beam Note TRI-BN-24–21; TRIUMF: Vancouver, BC, Canada, 2015. [Google Scholar]
- Rosenberg, R.M. The Ateb(h)-functions and their properties. Q. Appl. Math. 1963, 21, 37–47. [Google Scholar] [CrossRef]
- Senik, P.M. Inversions of the incomplete beta function. Ukr. Math. J. 1969, 21, 271–278. [Google Scholar] [CrossRef]
- Cveticanin, L.; Zukovic, M.; Cveticanin, D. Approximate analytic frequency of strong nonlinear oscillator. Mathematics 2024, 12, 3040. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.1 | 2 | 3 | 5 | 7 | |
|---|---|---|---|---|---|
| 1.1 | 2 | 3 | 5 | 7 | |
|---|---|---|---|---|---|
| 1.5144 | 1.8606 | 2.3688 | |
| 3.0299 | 3.7464 | 4.8248 | |
| 4.5466 | 5.6576 | 7.3748 | |
| 6.0644 | 7.5951 | 10.026 | |
| 7.5833 | 9.5596 | 12.787 | |
| 9.1033 | 11.552 | 15.668 | |
| 9.6240 | 13.573 | 18.679 | |
| 12.147 | 15.623 | 21.832 | |
| 13.670 | 17.703 | 25.142 | |
| 15.195 | 19.815 | 28.624 | |
| 16.720 | 21.958 | 32.299 | |
| 18.247 | 24.135 | 38.188 | |
| 19.775 | 26.346 | 40.318 | |
| 21.304 | 28.592 | 44.721 | |
| 22.835 | 30.875 | 49.435 | |
| 24.366 | 33.195 | 54.508 | |
| 6.0644 | 7.5951 | 10.026 | |
| 6.0826 | 8.143 | 12.355 | |
| 6.1000 | 8.643 | 15.176 | |
| 6.1190 | 9.060 | 16.320 | |
| 0.300% | 5.772% | 18.59% | |
| 0.306% | 6.135% | 22.83% | |
| 0.311% | 6.825% | 27.54% |
| Model of the Oscillator | |||
|---|---|---|---|
| 1.1 | |||
| 3 | |||
| 7 | |||
| 0.000; 0.500 | 0.000; 1.000 | 0.000; 2.000 | 0.000; 1.000 | 0.000; 1.000 | |
| 3.971; 0.438 | 1.913; 0.938 | 0.942; 1.938 | 1.866; 0.987 | 1.340; 0.956 | |
| 8.519; 0.376 | 3.958; 0.876 | 1.914; 1.876 | 3.757; 0.974 | 2.748; 0.912 | |
| 13.90; 0.314 | 6.152; 0.814 | 2.918; 1.815 | 5.674; 0.961 | 4.216; 0.869 | |
| 20.46; 0.253 | 8.519; 0.753 | 3.958; 1.753 | 7.617; 0.947 | 5.764; 0.825 | |
| 28.872; 0.191 | 11.089; 0.691 | 5.035; 1.691 | 9.588; 0.934 | 7.396; 0.781 | |
| 40.601; 0.129 | 13.900; 0.629 | 6.152; 1.629 | 11.586; 0.921 | 9.122; 0.738 | |
| 60.126; 0.067 | 17.002; 0.567 | 7.312; 1.567 | 13.613; 0.908 | 10.054; 0.695 | |
| 134.85; 0.005 | 20.461; 0.505 | 8.519; 1.505 | 15.669; 0.895 | 12.905; 0.650 | |
| 24.374; 0.444 | 9.776; 1.444 | 17.775; 0.882 | 14.992; 0.607 | ||
| 28.872; 0.382 | 11.089; 1.382 | 19.873; 0.869 | 17.235; 0.563 | ||
| 34.176; 0.320 | 12.460; 1.320 | 22.023; 0.856 | 19.659; 0.519 | ||
| 40.601; 0.258 | 13.900; 1.258 | 24.206; 0.843 | 22.206; 0.475 | ||
| 20.46 0.247 | 8.519 0.247 | 3.958 0.247 | 7.617 0.053 | 5.764 0.175 | |
| 114.39 0.248 | 11.942 0.248 | 4.561 0.248 | 8.052 0.052 | 7.141 0.175 | |
| 20.141 0.247 | 5.381 0.247 | 8.537 0.052 | 9.301 0.175 | ||
| 40.181% | 15.235% | 5.71% | 23.89% | ||
| 68.657% | 17.979% | 6.02% | 30.25% | ||
| 49.4% | 24.7% | 12.3% | 5.3% | 17.50% | |
| 98.0% | 32.9% | 14.4% | 5.49% | 21.21% | |
| 48.9% | 16.4% | 5.81% | 26.92% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cveticanin, L. Exact Solutions for Strong Nonlinear Oscillators with Linear Damping. Mathematics 2025, 13, 1662. https://doi.org/10.3390/math13101662
Cveticanin L. Exact Solutions for Strong Nonlinear Oscillators with Linear Damping. Mathematics. 2025; 13(10):1662. https://doi.org/10.3390/math13101662
Chicago/Turabian StyleCveticanin, Livija. 2025. "Exact Solutions for Strong Nonlinear Oscillators with Linear Damping" Mathematics 13, no. 10: 1662. https://doi.org/10.3390/math13101662
APA StyleCveticanin, L. (2025). Exact Solutions for Strong Nonlinear Oscillators with Linear Damping. Mathematics, 13(10), 1662. https://doi.org/10.3390/math13101662