
Optimization of Fuzzy Adaptive Logic Controller for Robot Manipulators Using Modified Greater Cane Rat Algorithm

 ,
,  , ,
, ,
Abstract
1. Introduction
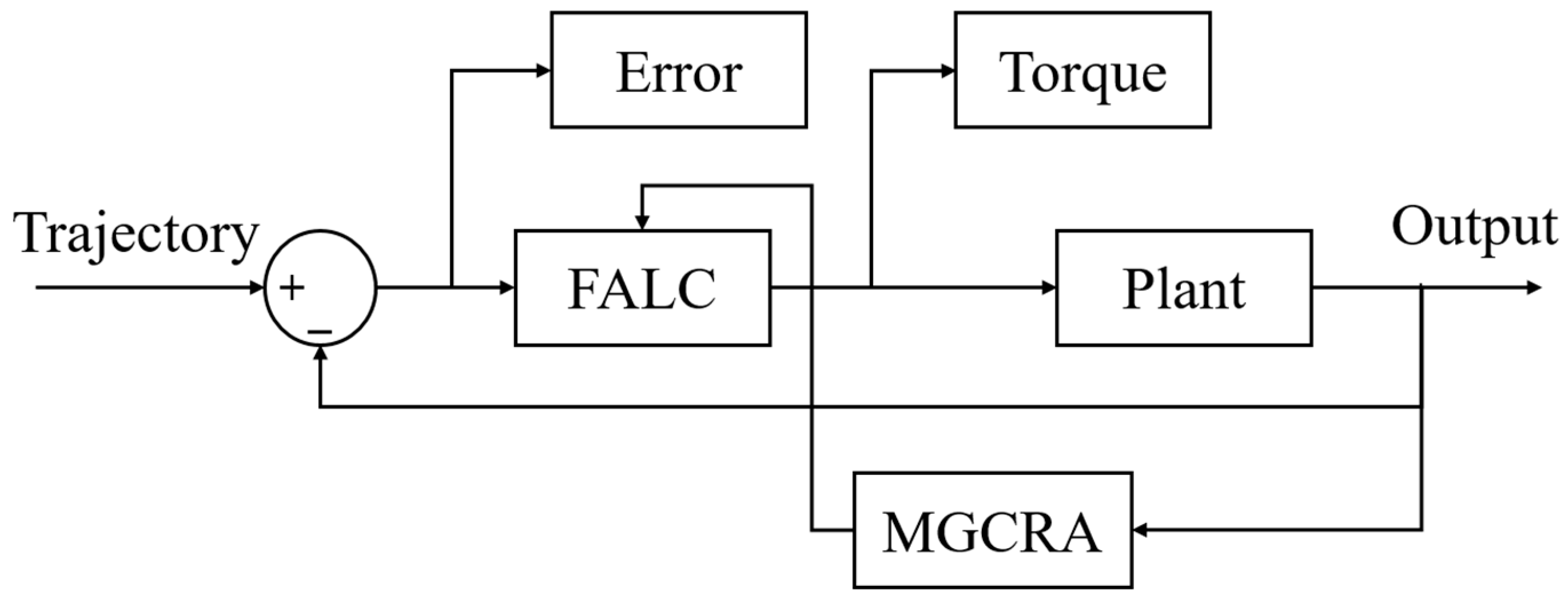
2. Fuzzy Adaptive Logic Controller (FALC) for Robot Manipulators
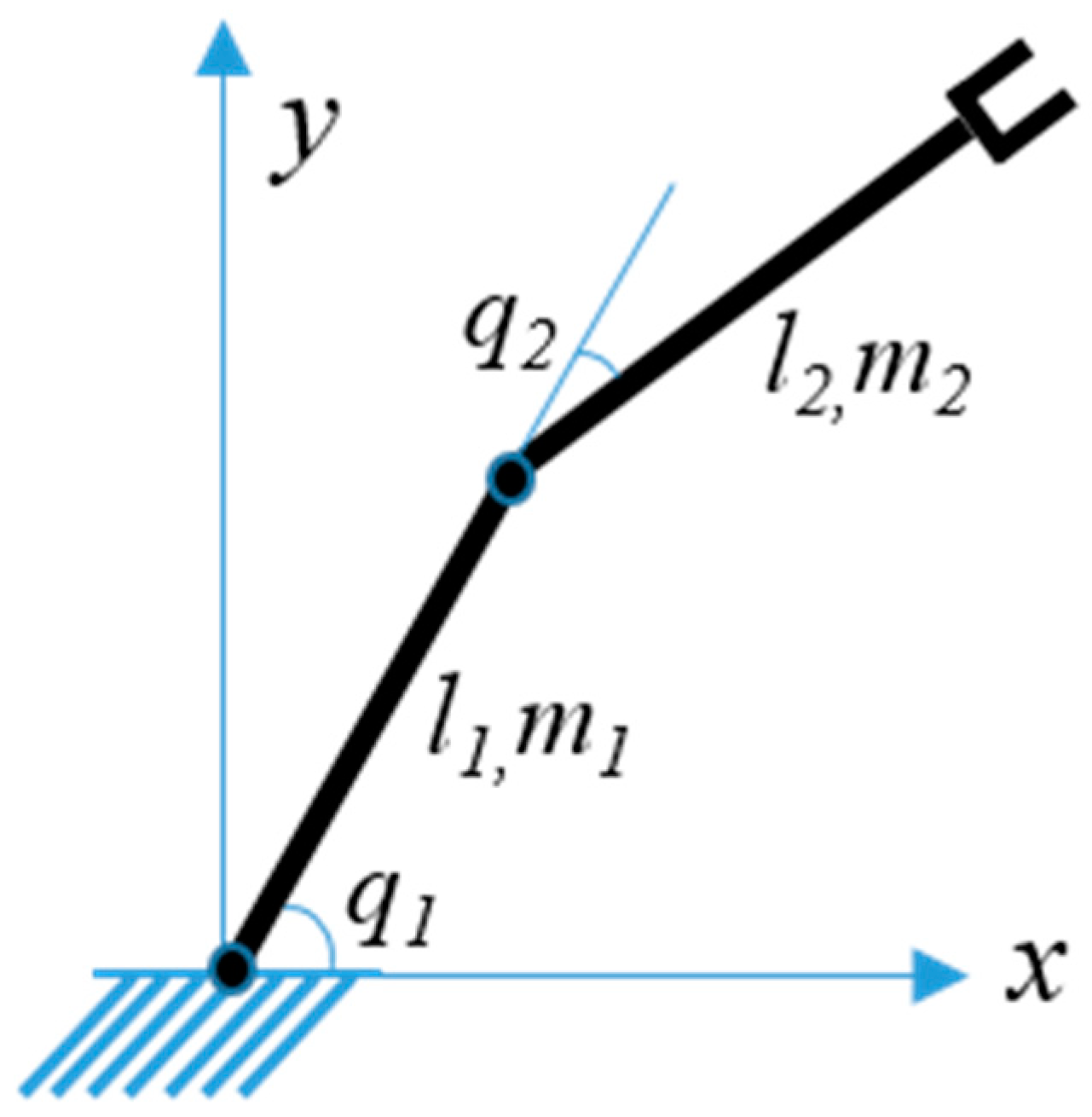
2.1. Dynamic Model of Robot Manipulators
2.2. Sliding Mode Controller
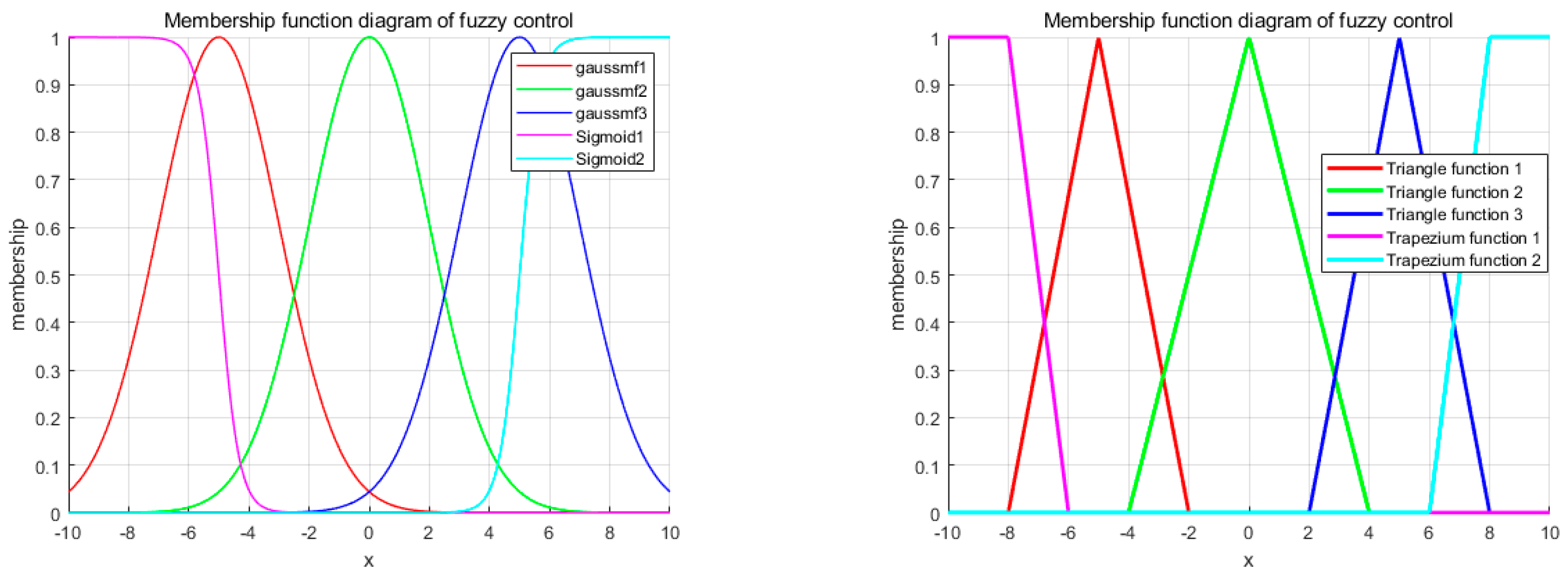
2.3. Fuzzy Adaptive Compensation with Unknown Friction
3. Modified Greater Cane Rat Algorithm (MGCRA)
3.1. Greater Cane Rat Algorithm
3.2. Modified Greater Cane Rat Algorithm (MGCRA)
4. Simulation Results
4.1. Optimization of Input Membership Functions of FALC with MGCRA
4.2. Comparison of Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jin, Y.; Liu, J.; Xu, Z.; Yuan, S.; Li, P.; Wang, J. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–19. [Google Scholar] [CrossRef]
- Roveda, L.; Maroni, M.; Mazzuchelli, L.; Praolini, L.; Shahid, A.A.; Bucca, G.; Piga, D. Robot End-Effector Mounted Camera Pose Optimization in Object Detection-Based Tasks. J. Intell. Robot. Syst. 2022, 104, 16. [Google Scholar] [CrossRef]
- Zubiete, E.D.; Nakahata, K.; Imamoglu, N.; Sekine, M.; Sun, G.; Gomez, I.; Yu, W. Evaluation of a Home Biomonitoring Autonomous Mobile Robot. Comput. Intell. Neurosci. 2016, 2016, 9845816. [Google Scholar]
- Benevides, J.; Paiva, M.; Simplício, P.; Inoue, R.; Terra, M. Disturbance observer-based robust control of a quadrotor subject to parametric uncertainties and wind disturbance. IEEE Access 2022, 10, 7554–7565. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy adaptive energy management strategy for a hybrid agricultural tractor equipped with HMCVT. Agriculture 2022, 12, 1986. [Google Scholar] [CrossRef]
- Du, X.; Huang, J.; Zhu, L.-M. Sliding mode control with third-order contour error estimation for free-form contour following. Precis. Eng. 2020, 66, 282–294. [Google Scholar] [CrossRef]
- Asar, M.F.; Elawady, W.M.; Sarhan, A.M. ANFIS-based an adaptive continuous sliding-mode controller for robot manipulators in operational space. Multibody Syst. Dyn. 2019, 47, 95–115. [Google Scholar] [CrossRef]
- Ren, C.E. Adaptive Fuzzy Disturbance Observer-Based Control for Nonlinear Uncertain Systems with General Exogenous Disturbances. Int. J. Fuzzy Syst. 2021, 23, 1453–1461. [Google Scholar] [CrossRef]
- Parra, A.; Zubizarreta, A.; Pérez, J. An energy efficient intelligent torque vectoring approach based on fuzzy logic controller and neural network tire forces estimator. Neural Comput. Appl. 2021, 33, 9171–9184. [Google Scholar] [CrossRef]
- Castro, J.R.; Castillo, O.; Melin, P.; Rodríguez-Díaz, A. A hybrid learning algorithm for a class of interval type-2 fuzzy neural networks. Inf. Sci. 2009, 179, 2175–2193. [Google Scholar] [CrossRef]
- Lagunes, M.L.; Castillo, O.; Soria, J.; Valdez, F. Optimization of a fuzzy controller for autonomous robot navigation using a new competitive multi-metaheuristic model. Soft Comput. 2021, 25, 11653–11672. [Google Scholar] [CrossRef]
- Balasamy, K.; Ramakrishnan, S. An intelligent reversible watermarking system for authenticating medical images using Wavelet and PSO. Clust. Comput. 2019, 22, 4431–4442. [Google Scholar] [CrossRef]
- Tao, Y.; Wen, Y.; Gao, H.; Wang, T.; Wan, J.; Lan, J. A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm. Electronics 2022, 11, 1192. [Google Scholar] [CrossRef]
- Toktas, A.; Stün, D.; Erdoan, N.B. Pioneer Pareto artificial bee colony algorithm for three-dimensional objective space optimization of composite-based layered radar absorber. Appl. Soft Comput. 2020, 96, 106696. [Google Scholar] [CrossRef]
- Karami, M.; Tavakolpour-Saleh, A.R.; Norouzi, A. Optimal Nonlinear PID Control of a Micro-Robot Equipped with Vibratory Actuator Using Ant Colony Algorithm: Simulation and Experiment. J. Intell. Robot. Syst. 2020, 99, 773–796. [Google Scholar] [CrossRef]
- Anter, A.; Hassanien, A.; ElSoud, M.; Kim, T. Feature selection approach based on social spider algorithm: Case study on abdominal CT liver tumor. In Proceedings of the 2015 Seventh International Conference on Advanced Communication and Networking (ACN), Kota Kinabalu, Malaysia, 8–11 July 2015; IEEE: Piscataway, NJ, USA, 11 July 2015; pp. 59–94. [Google Scholar]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2020, 166, 113917. [Google Scholar] [CrossRef]
- Valdez, F.; Castillo, O.; Peraza, C. Fuzzy Logic in Dynamic Parameter Adaptation of Harmony Search Optimization for Benchmark Functions and Fuzzy Controllers. Int. J. Fuzzy Syst. 2020, 22, 1198–1211. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control. Eng. Open Access J. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Li, X.; Gu, J.; Sun, X.; Li, J.; Tang, S. Parameter identification of robot manipulators with unknown payloads using an improved chaotic sparrow search algorithm. Appl. Intell. 2022, 52, 10341–10351. [Google Scholar] [CrossRef]
- Hansen, N.; Müller, S.D.; Koumoutsakos, P. Reducing the time complexity of the derandomized evolution strategy with covariance matrix adaptation (CMA-ES). Evol. Comput. 2003, 11, 1–18. [Google Scholar] [CrossRef]
- Mohamed, A.W.; Mohamed, A.K. Adaptive guided differential evolution algorithm with novel mutation for numerical optimization. Int. J. Mach. Learn. Cybern. 2019, 10, 253–277. [Google Scholar] [CrossRef]
- Bingul, Z.; Karahan, O. A Fuzzy Logic Controller tuned with PSO for 2 DOF robot trajectory control. Expert Syst. Appl. 2011, 38, 1017–1031. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Whale optimization algorithm-based Sugeno fuzzy logic controller for fault ride-through improvement of grid-connected variable speed wind generators. Eng. Appl. Artif. Intell. 2020, 87, 103328.1–103328.13. [Google Scholar] [CrossRef]
- Al-Dabbagh, R.D.; Kinsheel, A.; Mekhilef, S.; Baba, M.S.; Shamshirband, S. System identification and control of robot manipulator based on fuzzy adaptive differential evolution algorithm. Adv. Eng. Softw. 2014, 78, 60–66. [Google Scholar] [CrossRef]
- Bernal, E.; Lagunes, M.L.; Castillo, O.; Soria, J.; Valdez, F. Optimization of Type-2 Fuzzy Logic Controller Design Using the GSO and FA Algorithms. Int. J. Fuzzy Syst. 2021, 23, 42–57. [Google Scholar] [CrossRef]
- Rajeswari, C.; Santhi, M. Modified flower pollination algorithm for optimizing FOPID controller and its application with the programmable n-level inverter using fuzzy logic. Soft Comput. 2021, 25, 2615–2633. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Fang, Y. Adaptive fuzzy control for a class of MIMO underactuated systems with plant uncertainties and actuator deadzones: Design and experiments. IEEE Trans. Cybern. 2021, 52, 8213–8226. [Google Scholar] [CrossRef]
- Ahanda, J.; Achille, M.; Essimbi, B. Adaptive Fuzzy Finite-Time Command-Filtered Backstepping Control of Flexible-Joint Robots. Robotica 2020, 39, 1081–1100. [Google Scholar]
- Abadlia, I.; Hassaine, L.; Beddar, A.; Abdoune, F.; Bengourina, M.R. Adaptive fuzzy control with an optimization by using genetic algorithms for grid connected a hybrid photovoltaic-hydrogen generation system-ScienceDirect. Int. J. Hydrogen Energy 2020, 45, 22589–22599. [Google Scholar] [CrossRef]
- Kluska, J. Adaptive Fuzzy Control of State-Feedback Time-Delay Systems With Uncertain Parameters. Inf. Sci. 2020, 540, 202–220. [Google Scholar] [CrossRef]
- Lin, G.; Yu, J.; Liu, J. Adaptive fuzzy finite-time command filtered impedance control for robotic manipulators. IEEE Access 2021, 9, 50917–50925. [Google Scholar] [CrossRef]
- Ganesh, E.N.; Bettyjane, J. Simulation and synthesis of TS fuzzy system using parallel distribution compensation technique. Int. J. Inf. Technol. 2020, 12, 1443–1449. [Google Scholar] [CrossRef]
- Agushaka, J.O.; Ezugwu, A.E.; Saha, A.K.; Pal, J.; Abualigah, L.; Mirjalili, S. Greater Cane Rat Algorithm (GCRA): A Nature-Inspired Metaheuristic for Optimization Problems. Heliyon 2024, 10, e31629. [Google Scholar] [CrossRef]
- Wu, P.; Lei, X.; Zeng, J.; Qi, Y.; Yuan, Q.; Huang, W.; Ma, Z.; Shen, Q.; Lyu, X. Research progress in mechanized and intelligentized pollination technologies for fruit and vegetable crops. Int. J. Agric. Biol. Eng. 2024, 17, 11–21. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Jin, J.; Gans, N. Parameter identification for industrial robots with a fast and robust trajectory design approach. Robot Comput. Integer. Manuf 2015, 31, 21–29. [Google Scholar] [CrossRef]
- Pi, J.; Liu, J.; Zhou, K.; Qian, M. An octopus-inspired bionic flexible gripper for apple grasping. Agriculture 2021, 11, 1014. [Google Scholar] [CrossRef]
- Ji, W.; Qian, Z.; Xu, B.; Tang, W.; Li, J.; Zhao, D. Grasping damage analysis of apple by end-effector in harvesting robot. J. Food Process Eng. 2017, 40, e12589. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot Parameters | m1 | l1 | m2 | l2 | g |
|---|---|---|---|---|---|
| Value | 1 kg | 1 m | 1.5 kg | 0.8 m | 9.8 N/kg |
| Case1 | Case2 | Case3 | Case4 | Case5 | MGCRA | |
|---|---|---|---|---|---|---|
| SMAT | 140.7107 | 120.8325 | 120.5008 | 132.0713 | 143.3745 | 106.2119 |
| Max (abs(tol1)) | 91.2328 | 72.8255 | 73.1079 | 75.7330 | 83.3299 | 70.2216 |
| Max (abs(tol2)) | 49.4779 | 48.0070 | 47.3929 | 56.3382 | 60.0447 | 35.9903 |
| SSE (link1) | 1.3805 × 10−5 | 2.0925 × 10−5 | 1.0719 × 10−5 | 2.3926 × 10−5 | 5.9086 × 10−5 | 1.3222 × 10−5 |
| SSE (link2) | 0.0047 | 0.0048 | 0.0048 | 0.0048 | 0.0048 | 0.0048 |
| PSO | ABC | ACO | GWO | GCRA | MGCRA | |
|---|---|---|---|---|---|---|
| SMAT | 107.7349 | 108.8593 | 107.6904 | 109.4637 | 107.1476 | 106.2119 |
| Max (abs(tol1)) | 70.8775 | 70.8039 | 71.3263 | 72.4492 | 71.0536 | 70.2216 |
| Max (abs(tol2)) | 36.8575 | 38.0554 | 36.3641 | 37.0145 | 36.0940 | 35.9903 |
| SSE (link1) | 1.4328 × 10−5 | 1.7524 × 10−5 | 1.2260 × 10−5 | 1.3522 × 10−5 | 1.3717 × 10−5 | 1.3222 × 10−5 |
| SSE (link2) | 0.0048 | 0.0048 | 0.0048 | 0.0048 | 0.0048 | 0.0048 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Wu, S.; Chen, J.; Li, X.; Wu, Z.; Xia, R.; Pan, W.; Zhang, Y. Optimization of Fuzzy Adaptive Logic Controller for Robot Manipulators Using Modified Greater Cane Rat Algorithm. Mathematics 2025, 13, 1631. https://doi.org/10.3390/math13101631
Sun J, Wu S, Chen J, Li X, Wu Z, Xia R, Pan W, Zhang Y. Optimization of Fuzzy Adaptive Logic Controller for Robot Manipulators Using Modified Greater Cane Rat Algorithm. Mathematics. 2025; 13(10):1631. https://doi.org/10.3390/math13101631
Chicago/Turabian StyleSun, Jian, Shuyi Wu, Jinfu Chen, Xingjia Li, Ziyan Wu, Ruiting Xia, Wei Pan, and Yan Zhang. 2025. "Optimization of Fuzzy Adaptive Logic Controller for Robot Manipulators Using Modified Greater Cane Rat Algorithm" Mathematics 13, no. 10: 1631. https://doi.org/10.3390/math13101631
APA StyleSun, J., Wu, S., Chen, J., Li, X., Wu, Z., Xia, R., Pan, W., & Zhang, Y. (2025). Optimization of Fuzzy Adaptive Logic Controller for Robot Manipulators Using Modified Greater Cane Rat Algorithm. Mathematics, 13(10), 1631. https://doi.org/10.3390/math13101631