1. Introduction
Jerk is the rate of change of acceleration, the third derivative of position with respect to time [
1]. A jerk equation
and the corresponding jerk system, which is a three-dimensional system given by
can model processes characterized by changes in acceleration. Despite their simple form, jerk systems provide examples of chaotic behavior (see, e.g., [
2,
3,
4]). Bifurcations in the dynamics of jerk systems are also analyzed (see, e.g., [
5,
6,
7,
8]).
In this paper, we study how Hamilton–Poisson jerk systems can be constructed. Roughly speaking, a three-dimensional system is a Hamilton–Poisson system if it has two independent constants of motion (for details on Hamilton–Poisson mechanics, see e.g., [
9]). Using such functions, we obtain a family of Hamilton–Poisson jerk systems, given by
, which are in fact jerk versions of the system with one degree of freedom
[
10]. For instance, the equations of the harmonic oscillator, the mathematical pendulum, the Duffing oscillator, and other anharmonic oscillators are of this form.
Oscillatory systems, characterized by repetitive patterns or cycles, are found in various biological phenomena such as circadian rhythms (see, e.g., [
11]), neuronal activity (see, e.g., [
12]), and even in cellular processes like metabolic oscillations (see, e.g., [
13]). Population dynamics in predator–prey relationships often display cyclic behavior, where changes in predator and prey populations exhibit periodic patterns (see, e.g., [
14]). Modeling changes in population sizes or ecological systems often involves sudden shifts or rapid changes in growth rates, which can be compared analogously to jerk-like behavior in dynamic systems. Moreover, in neural systems, sudden changes in firing rates or neuronal activities might indirectly relate to rapid changes in behavior akin to jerk-like dynamics.
The paper is organized as follows: in
Section 2, we recall some notions regarding Hamilton–Poisson systems and then we give some conditions for which system (
1) is of this type. Using the integrable deformation method (see [
15] and references therein), we construct a family of Hamilton–Poisson jerk systems. Also, we give Hamilton–Poisson realizations of such a system. In
Section 3, we analyze some dynamical properties of the obtained system, namely, the stability of the equilibrium points, the existence of the periodic orbits around some nonlinearly stable equilibria, and the existence of homoclinic or heteroclinic orbits. In
Section 4, we apply these results to a family of anharmonic oscillators [
16].
2. A Family of Hamilton–Poisson Jerk Systems
In this section, we construct a family of jerk systems that have Hamilton–Poisson realizations.
Recall that the three-dimensional dynamical system
is a Hamilton–Poisson system on
if there are the smooth functions
such that
on
(see, e.g., [
17,
18]). The function
is called the rescaling function. In addition, the Hamiltonian function
H and the Casimir function
C are constants of motion of the above system. In fact, a Hamilton–Poisson system on
is a triple
, where
is a Poisson structure, and in this case it is given by the matrix
where we have denoted
. Such a system writes
Details on Hamiltonian mechanics can be found, for example, in [
19].
In the following, we consider
. One of our goals is to obtain jerk systems that can be written in the form
that is, to determine functions
such that
and which are constants of motion of system (
1), that is,
We note that achieving this goal appears to be complicated for a general jerk function However, the next result holds.
Theorem 1. If then jerk system (1) cannot have a Hamilton–Poisson formulation Proof. On the one hand, the divergence of system (
1) is
. On the other hand,
; thus,
, which finishes the proof. □
Instead of starting with a function
j and checking for the existence of the functions
H and
C, we can construct Hamilton–Poisson jerk systems using integrable deformation method [
15].
Consider the jerk equation
and the corresponding jerk system
It is easy to see that the functions
are constants of motion for system (
3). Moreover, system (
3) writes
; thus, it has the Hamilton–Poisson realization
with the Hamiltonian
H and the Poisson structure given by the matrix
Now, we alter the above Hamiltonian and Casimir functions, that is, we consider the functions
where
and
are smooth, and
are real parameters. Then, an integrable deformation of system (
3) is given by
that is
System (
7) is jerk only if
Now, we choose
and (
8) turns into
Then,
thus,
and, consequently,
Therefore,
Consequently, if the functions
and
satisfy the relation
then we constructed the following family of Hamilton–Poisson jerk systems
The corresponding jerk equation is given by
The jerk versions of the most known oscillators (the harmonic oscillator , the mathematical pendulum , and the Duffing oscillator ) belong to the above family of jerk equations.
In the following, we give Hamilton–Poisson realizations of system (
10). For this purpose, using (
2), the functions
give the matrices
and
respectively.
Theorem 2. Let be smooth functions such that , where Then, system (10) has the Hamilton–Poisson realizationsMoreover, (10) is a bi-Hamiltonian system. Proof. Using (
12)–(
14), it is easy to see that system (
10) writes
In addition,
and
The sum of the matrices
and
is a Poisson structure. Therefore,
and
are compatible Poisson structures, and (
10) is a bi-Hamiltonian system. □
As a consequence, we obtain the next result.
Theorem 3. Let such that . Then, system (10) admits infinitely many Hamilton–Poisson realizations where the Hamiltonian is given bythe Poisson structure is defined byand a Casimir of the Poisson structure is Since
for all
, every level set of the Casimir function
C is a regular surface. We denote such a level set by
The regular symplectic leaves associated with the Poisson structure
are given by the connected components corresponding to pre-images of regular values of the Casimir function
C. Therefore,
is the regular symplectic leaf of the Poisson structure
corresponding to the regular value
of
C. In addition, the dynamics of the Hamilton–Poisson system
are foliated by these symplectic leaves. Moreover, the restriction of system (
10) to a regular leaf
is the following completely integrable Hamiltonian system
where the Hamiltonian
is given by
The reduced equations are
or equivalent
where
Thus, on each level set
the dynamics of system (
10) are given by system (
16) or Equation (
17), representing a nonlinear oscillator with the kinetic energy
and the potential energy
(for details about the system
, see, e.g., [
10,
20]).
3. Some Dynamical Properties
In this section, we study the stability of system (
10) and we prove the existence of some periodic orbits. Also, we obtain sufficient conditions for the existence of heteroclinic and homoclinic orbits.
The equilibrium points of system (
10) are given by the family
Now, we discuss their stability.
Theorem 4. Let be smooth functions such that , where Denote as an arbitrary equilibrium point of system (10). Also consider the function - (i)
If or , then the equilibrium point is unstable.
- (ii)
If , then the equilibrium point is nonlineary stable.
- (iii)
If and there is a neighborhood of M such that for all , then the equilibrium point is nonlineary stable.
- (iv)
If and there is a neighborhood of M such that for all or , then the equilibrium point is unstable.
Proof. The Jacobian matrix of system (
10) at
is
with the characteristic polynomial
and eigenvalues
(i) Let
. From (
21), it results that one of the eigenvalues is a positive number. Therfore,
is an unstable equilibrium point.
If
, system (
10) becomes (
3), and it has the solution
where
. Thus,
is an unstable equilibrium point.
(ii) Let
. In this case, we use the Arnold stability test (see, e.g., [
21]). We consider the function
where
is a real parameter. We obtain:
if and only if .
.
, which is positive definte.
From the Arnold stability test, it results that the equilibrium point is nonlineary stable for .
(iii) Let
be a neighborhood of
such that
We consider the function
,
and we prove that it is a Lyapunov function.
By the condition
, we obtain
and
Then, using the hypothesis, we deduce that
and
. Therefore,
on
U if and only if
,
, that is,
L given by (
22) is a positive definite function on
U. Moreover, by (
10) we obtain
; thus,
L is a Lyapunov function. Therefore, the equilibrium point
is nonlineary stable.
(iv) Consider, for example,
for all
From (
24), let us take
for
and
(
23). Then, system (
10) reduces to the equation
Considering the initial condition
near
M, we obtain a solution
that is increasing and moving away from
M, and the conclusion follows. □
Remark 1. If is an increasing function such that then the function F fulfills the hypothesis given in Theorem 4; thus, the equilibrium point is nonlinearly stable.
The next result shows the existence of a family of periodic orbits around some nonlinearly stable equilibrium points.
Theorem 5. Let be smooth functions such that , where Let be a nonlineary stable equilibrium point of system (10) in the case . Then, for each sufficiently small , any integral surfacecontains at least one periodic orbit of system (10) whose period is close to , where Proof. The characteristic polynomial associated with the linearization of system (
10) at
has the eigenvalues
and
. The eigenspace corresponding to the eigenvalue zero, which is
, has dimension 1.
We consider the constant of motion of system (
10) given by
It follows that:
.
is positive definte for , where .
and the conclusion follows via a version of the Moser theorem in the case of zero eigenvalue [
22]. □
In the following, we study the existence of homoclinic and heteroclinic orbits of system (
10).
Let us consider an arbitrary unstable equilibrium point
of system (
10), which is a saddle, that is,
A homoclinic or heteroclinic orbit is given by the intersection of the level sets
and
, provided it exists. In this case, we can reduce system (
10) to
where the smooth function
F is given by (
18). We have
and
Moreover,
.
Considering only the level set
system (
10) reduces to
for which an equilibrium point is
if
The above system writes
, and it is given by the Hamiltonian
where
is the potential energy. Therefore, for a given function
F, “a look at the graph of the potential energy is enough for a qualitative analysis of such an equation” [
10]. In addition, “if there are two saddle points with the same energy level, corresponding to two maxima of
, with no higher maximum between them, then they must be connected by heteroclinic orbits” [
20].
The motion of the particle is confined to the region , and the points with the property determine the bounds for the motion. Because heteroclinic and homoclinic orbits are bounded, we assume there is such that and for all Since , we obtain that F has at least a local maximum ; hence, is an equilibrium point. Moreover, F is concave in a neighborhood of N; thus, is a nonlinearly stable equilibrium point (via Theorem 4 (ii); note that is the same for all equilibrium points). Then, we obtain the next result.
Theorem 6. Let be smooth functions such that , where and represent an arbitrary unstable equilibrium point of system (10) such that We consider the function F defined in (18), that is, Assume there is such that for all , and the function F does not have local minima on .
- (i)
If and , then a heteroclinic orbit given by (25) exists, which connects the unstable equilibrium points and . - (ii)
If , then a homoclinic orbit given by (25) exists, which connects the unstable equilibrium point with itself.
Remark 2. The above theorem also holds for .
4. The Anharmonic Oscillator
In this section, we apply the obtained results to the jerk version of the anharmonic oscillator given by the equation where and integer.
We have
or equivalent
Therefore, system (
28) belongs to the considered family of Hamilton–Poisson jerk systems (
10) if
The constants of motion are given by
The stability of the equilibrium points follows by Theorem 4.
Proposition 1. Let be an arbitrary equilibrium point of system (28), and - (i)
If , then the equilibrium point is unstable.
- (ii)
If , then the equilibrium point is nonlinearly stable.
- (iii)
If and n is odd, then the equilibrium point is nonlineary stable; otherwise, it is unstable.
Around some nonlinearly stable equilibrium points, there is a family of periodic orbits of the considered system. More precisely, by Theorem 5 we deduce the next result.
Proposition 2. Let be a nonlineary stable equilibrium point of system (28) in the case . Then, for each sufficiently small , any integral surfacecontains at least one periodic orbit of system (28) whose period is close to , where As we have seen in Theorem 6, some homoclinic or heteroclinic orbits can exist in the considered dynamics.
Proposition 3. Let be an unstable equilibrium point of system (28). If n is even and , then a homoclinic orbit exists that connects the unstable equilibrium point with itself. Moreover, the heteroclinic orbits cannot exist in this case. Proof. Let
. We consider the function
F defined in (
18), namely,
Using and we deduce the following:
- (a)
Let and Then, there is an unique such that (). In fact, for all , and otherwise. Using Theorem 6, a homoclinic orbit exists that connects the unstable equilibrium point with itself. Moreover, the heteroclinic orbits cannot exist.
- (b)
If and , then we obtain the same result on , which finishes the proof.
□
Remark 3. If n is odd, then is an unstable equilibrium point for In this case, the above-mentioned function F has the property and otherwise. Thus, the motion of system (28) is unbounded. As a particular case, we consider
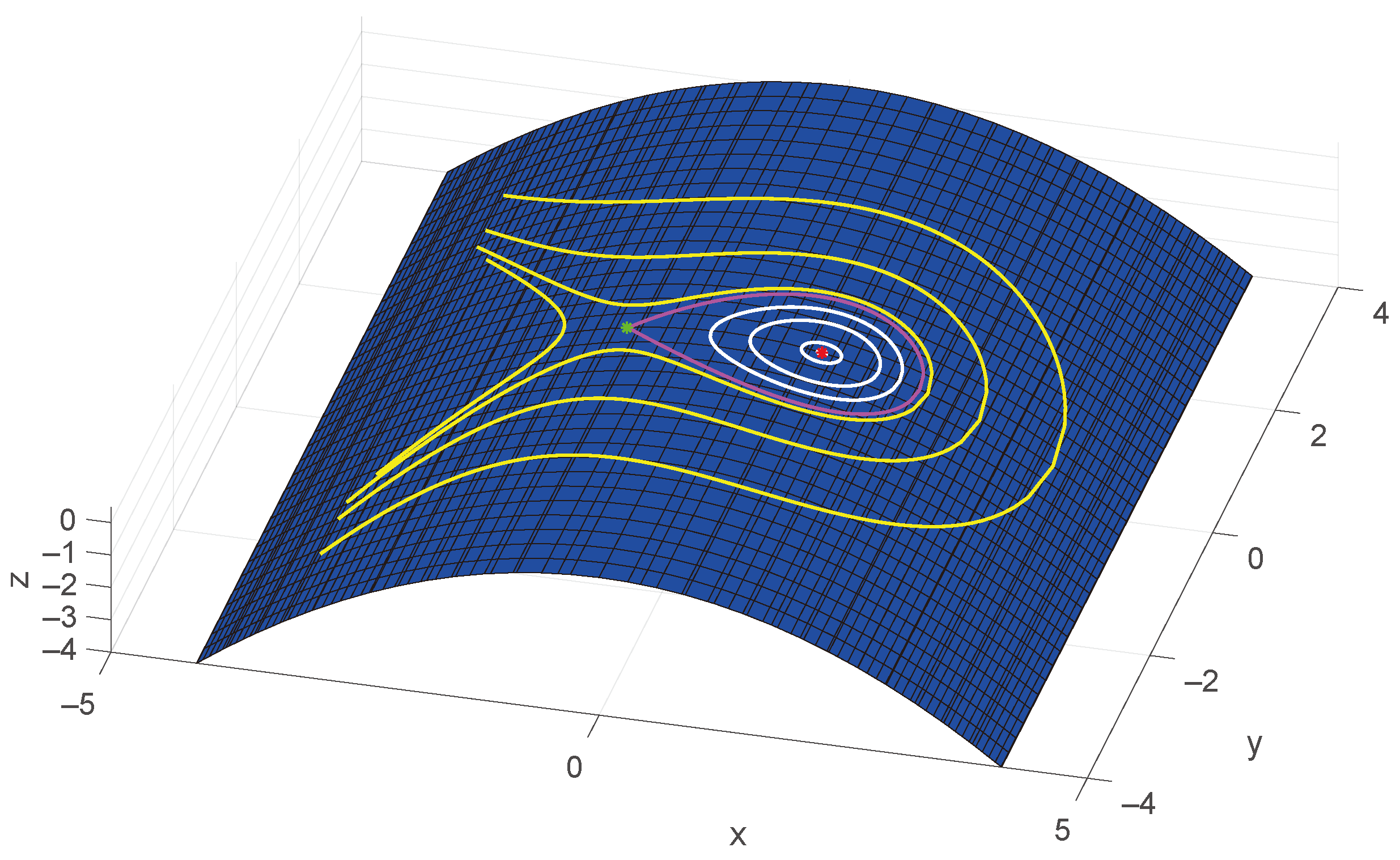
, that is,
Let
. Thus, the equilibrium point
is nonlinearly stable, and a family of periodic orbits of the above system surrounds it (white curves in
Figure 1). Choosing initial conditions farther and farther from
, these periodic orbits approach the unstable equilibrium point
that is, they tend towards the homoclinic orbit that connects the unstable equilibrium point
with itself (the pink curve in
Figure 1). After that, the unbounded curves appear in the dynamics of system (
31) (yellow curves in
Figure 1).
Below, we deduce the parametric representation of the homoclinic orbit of system (
31) in the case
and
. Using (
25) and (
30), system (
31) reduces to the equation
By integration and (
25), (
31), we obtain the homoclinic orbit
where
where
is an arbitrary constant.
A similar result is obtained in the case
(
), namely, the homoclinic orbit
where
5. Conclusions
In this paper, we constructed a family of Hamilton–Poisson jerk systems and we studied some dynamical properties.
The dynamics of a three-dimensional Hamilton–Poisson system take place at the intersection of the level sets given by the two constants of motion. Thus, for particular constants of motion, the orbits of the system can be depicted. In general, we studied the stability of the equilibrium points, and we proved the existence of periodic orbits around nonlinearly stable equilibrium points. Also, we established conditions for the existence of homoclinic and heteroclinic orbits. Particularly, we applied the results to a family of anharmonic oscillators.
We noticed that jerk versions of some nonlinear oscillators belong to this family, particularly the harmonic oscillator and some anharmonic oscillators. In quantum field theory (QFT), while the harmonic oscillator is a fundamental concept, there are other general potentials, including anharmonic potentials. Consequently, we expect some connections between our work and QFT, particularly solitons.




{kind=link}
