1. Introduction
Incompressible Maxwell fluids (IMFs), which are relevant when modelling the behaviour of some polymers [
1], were initially developed by Maxwell [
2] to describe the viscous and elastic responses of air. They form the simplest class of rate-type fluids that take into consideration the relaxation phenomenon and have been used to study viscoelastic flows for both small and large values of the dimensionless time of relaxation. The constitutive equations of these fluids are given by the following relations [
3].
Here T is the stress tensor, is the extra-stress tensor, L is the velocity gradient, D is the rate of deformation tensor, represents the indeterminate stress due to the constraint of incompressibility, is the relaxation time of the fluid and is the fluid viscosity. If , the governing Equation (1) define the incompressible Newtonian fluids.
In the literature there are numerous studies regarding unsteady motions of Maxwell fluids using different techniques and the exact solutions for such motions are important from two points of view. Firstly, they serve as descriptions of the behavior of those fluids in different circumstances and secondly, they can be useful to verify numerical procedures that are developed for more complex motion problems. The first exact solutions for unsteady motions of incompressible Maxwell fluids seem to be those of Srivastava [
4] in cylindrical domains. Recently, steady state solutions for two oscillatory flows of these fluids through a tube with rectangular cross section or isosceles right triangular cross section were obtained by Wang et al. [
5] and Sun et al. [
6], respectively. Analytical solutions for unsteady motions of same fluids in rectangular domains can be found, for instance, in the book of Bohme [
3], and the paper of Hayat et al. [
7].
In the last decades the fractional calculus has been successfully used in describing of complex dynamic [
8,
9], it being a valuable tool to handle viscoelastic properties of fluids. A good fit of experimental data with theoretical results has been achieved by Makris [
10,
11] using the fractional Maxwell model instead of the classical model of Maxwell fluids. To describe rheological characteristics of many materials, constitutive equations with fractional derivatives have been proposed by Bagley [
12], Friedrich [
13], Mainardi [
14] and Hristov [
15]. Among the first exact solutions for unsteady motions of the fractional incompressible Maxwell fluids (FIMFs) over an infinite plate or between two infinite parallel plates we remember those of Tan and Xu [
16], Tan et al. [
17], Hayat et al. [
18], Shaowei and Mingyu [
19], Qi and Xu [
20] and Corina Fetecau et al. [
21].
At the same time, the fluid motions in the presence of a magnetic field or through a porous medium have multiple applications in polymer technology, the petroleum industry, nuclear reactors, geophysical and astrophysical studies, oil reservoir technology, agricultural engineering, and many other fields. The interference between a moving electrical conducting fluid and a magnetic field produces effects with applications in chemistry, physics, and engineering. The most recent works that have studied such motions of electrically conducting incompressible Maxwell fluids (ECIMFs) between infinite parallel plates are those of Ullah et al. [
22] and Fetecau et al. [
23]. However, none of the above-mentioned papers have studied the motions of ECIMFs in which a differential expression of shear stress is prescribed on the boundary. Foundationally, Renardy [
24,
25] brought to light the fact that differential expressions of stresses have to be prescribed on the boundary in order to formulate well-posed boundary value problems for rate-type fluids. The first exact steady solutions for MHD motions of a large class of rate fluids through a porous medium have been recently provided by Fetecau et al. [
26].
The main purpose of the present work was to investigate some unidirectional MHD motions of ECIMFs between two infinite horizontal parallel plates incorporated in a porous medium when differential expressions of the non-trivial shear stress are prescribed on the boundary. For extension, as well as for comparison with a fractional model, general dimensionless solutions corresponding to the same motions of the fractional electrically conducting incompressible Maxwell fluids (FECIMFs) were also determined. In both situations, closed-form expressions were established for the fluid velocity, non-trivial shear stress, and Darcy’s resistance. It was proven that, in some circumstances, the unsteady motions of FECIMFs become steady in time. For illustration, as well as for comparison, three particular cases were considered, and the correctness of the obtained results was graphically proved. Finally, some characteristics of the FECIMFs’ behaviours were graphically underlined and discussed.
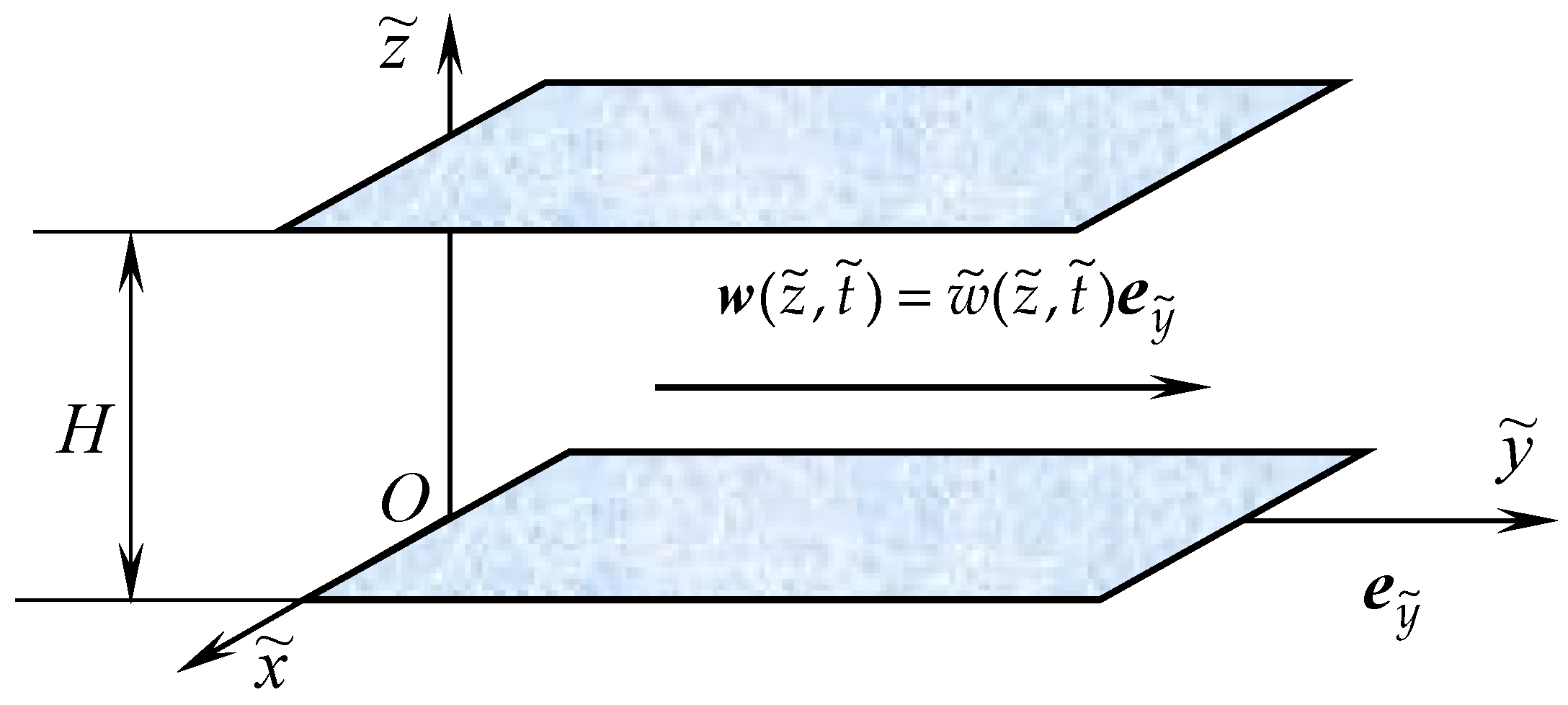
2. Presentation of the Problem
Consider an ECIMF at rest between two infinite horizontal parallel plates embedded in a porous medium. At this moment
, the two plates begin to apply time-dependent shear stresses of the form (see
Figure 1).
to the fluid and a uniform magnetic field of magnitude
B acts vertically on plates. Here,
S is a constant shear stress, while the two functions
and
are piecewise continuous
. We also assume that the fluid is finitely conducting and its magnetic Reynolds number is small enough. So, the Joule heating and the induced magnetic field can be neglected. The ionized liquids and the fluids exhibiting metallic properties, for instance, satisfy these conditions [
27]. Furthermore, the Hall effects will be neglected for moderate values of the Hartmann number.
Due to the shear, the fluid is gradually moved, and its movement in a suitable Cartesian coordinate system
, and
, the
-axis of which is vertical to plates, is characterized by the velocity vector [
3,
7]
Here
is the unit vector along the
-axis and the continuity equation is identically satisfied. We also assume that the extra-stress tensor
S, as well as the fluid velocity, is a function of
and
only, and no superfluous electric charge exists. In these conditions, the balance of linear momentum reduces to a partial differential equation [
28]
if there is no pressure gradient in the flow direction. In the previous relation,
is the fluid density,
is its electrical conductivity,
is the non-trivial shear stress,
H is the distance between plates, and Darcy’s resistance
has to satisfy the following partial differential equation [
28]
in which
is the porosity and
k is the permeability of the porous medium.
Introducing
Equation (3) into the second relation (1), and bearing in mind the fact that the fluid has been at rest up to the initial moment
, results in the non-trivial tangential stress
having to satisfy the partial differential equation.
In the above relation, and k are the porosity and the permeability, respectively, of the porous medium.
The appropriate initial and boundary conditions are
The above relations (8) results in those differential expressions of the shear stress
being prescribed on the boundary. General exact solutions for such motion problems of ECIMFs are lacking in the literature. The volume flux
across a plane perpendicular to the flow direction per unit width of this plane can be determined by means of the following relation
Introducing the following non-dimensional functions and variables
where
is the kinematic viscosity of the fluid, one obtains the dimensionless forms
for the three governing Equations (4)–(6). In these last equations, the Hartmann and Weissenberg numbers Ha and We, respectively, and the porosity parameter
K are defined by the following relations
where
is a characteristic time scale. The Hartman number is the ratio of electromagnetic force to the viscous force, while the Weissenberg number is the ratio of the relaxation time and a characteristic time scale.
The corresponding initial and boundary conditions are
The dimensionless volume flux
can be determined using the relation
In the following section, exact solutions for the system of partial differential Equations (11)–(13) with the initial and boundary conditions (15) and (16) will be derived by means of Laplace and finite Fourier cosine transforms. For illustration, as well as for the validation of obtained results, some special cases are considered, and equivalent forms are provided for the steady-state components of the starting velocities.
Later, for extension, exact general solutions will be established for the same motions of the fractional model described using Equation (11) and
Their correctness will be proven by comparing them with the previous solutions, and the fluids whose behaviour can be described by the governing Equations (11), (18), and (19) will be called fractional electrically conducting incompressible Maxwell fluids (FECIMFs). The fractional Caputo derivative
from the above equations is defined by the relation
Additionally, its Laplace transform is
The corresponding initial and boundary conditions are given by Equations (15) and (16).
3. Exact General Solutions Corresponding to the Ordinary Model (ECIMFs)
Applying the Laplace transform to the governing equalities (11)–(13) and bearing in mind the initial conditions (15), one attains to the following relations
where
are Laplace transforms of
, respectively, and
s is the transform parameter.
By eliminating
and
between Equations (22) and (23), one obtains the following ordinary differential equation
with the boundary conditions
for
. In the last two relations, the function
is given by the equality
while
are the Laplace transforms of
and
, respectively.
In order to present in suitable forms the problem solutions, we firstly make the following change for the unknown function
where
Substituting
from Equation (27) into (24), and having in mind the boundary conditions (25), results in the new function
having to satisfy the ordinary differential equation
with the boundary conditions
The solution to the ordinary differential Equation (29) with the boundary conditions (30) will be determined by means of the finite Fourier cosine transform and its inverse defined by the relations (A1) from
Appendix A. Consequently, by multiplying Equation (29) by
, integrating the result between zero and one, and using the identities ((A2) and (A3)) from
Appendix A, one finds the following expressions.
for the finite Fourier cosine transform
of
. Here,
, where
.
Here, by applying the inverse Fourier cosine transform to equality (31), one finds that
where
By substituting
from Equation (32) into (27), one obtains, for
, the expression
In order to determine the inverse Laplace transform of
, we write it in the convenient form
where
Using the identity (A4) from
Appendix A, one finds that
Here, we write
under the convenient form
where
and apply the inverse Laplace transform. By using the identity (A4) from
Appendix A one obtains
where
is the Dirac delta function.
Finally, by applying the inverse Laplace transform to Equation (34) and using the previous results, one finds for the dimensionless velocity field
the expression
The corresponding shear stress
and the Darcy’s resistance
, which are given by the following two relations
have been obtained applying the Laplace transform and then its inverse to Equations (12) and (13).
In the special case when
(when the two plates apply the same shear stress to the fluid) the corresponding velocity field
takes the simpler form (see for instance [
29], the entry 3 of Table 8)
3.1. Special Cases and
Let us now consider the cases when the function
from Equation (43) is equal to
or
, where
is the non-dimensional frequency of the oscillations and
is the Heaviside unit step function, and denote, using
and
, the dimensionless starting velocities corresponding to the two associated motions. They are given by the relations.
Lengthy but straightforward computations show that the starting velocities
can be written as a summation of their steady-state (permanent or long time) and transient components, namely,
in which
where
.
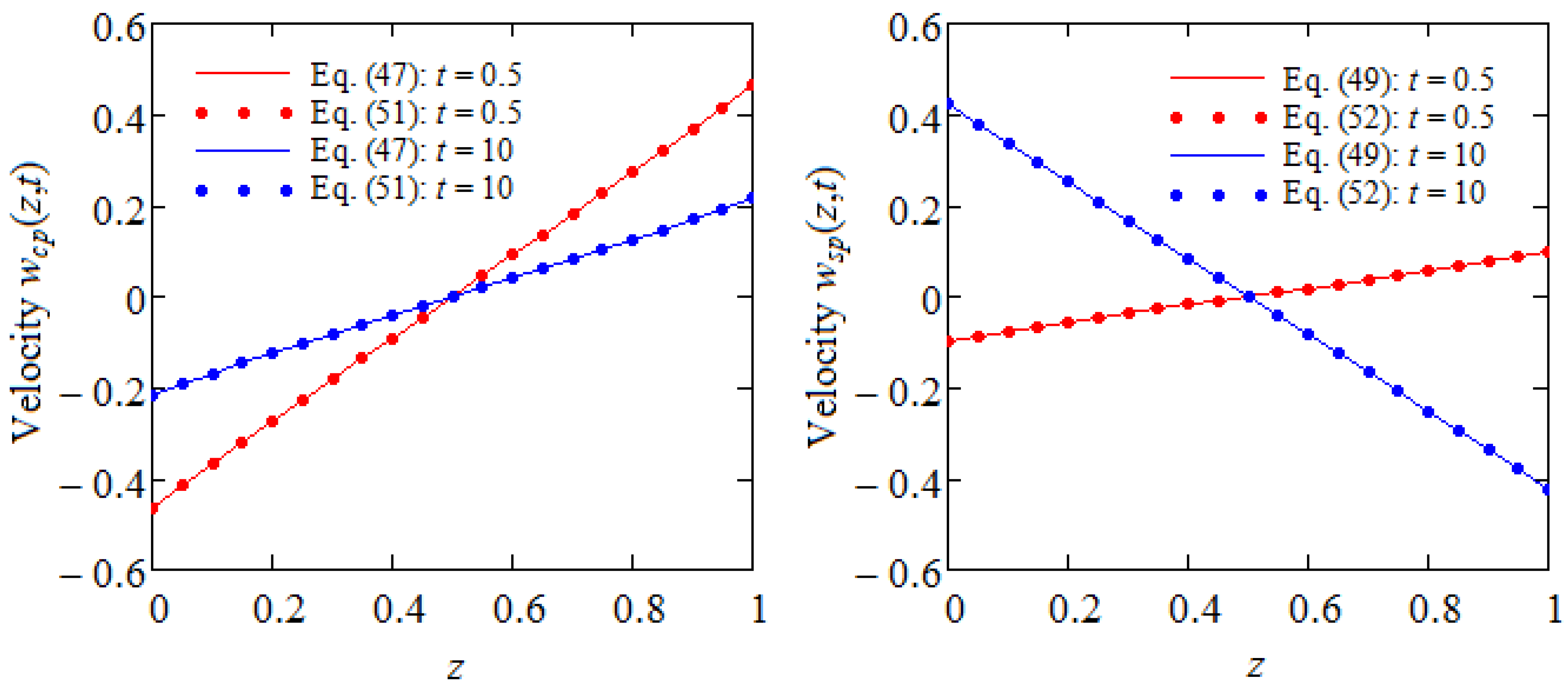
Direct computations show that the steady-state velocity fields
and
can also be presented in simpler forms, namely,
where
.
Figure 2 clearly show the equivalence of the expressions of
and
given by Equations (47), (51) and (49), (52), respectively.
For completion, we also provide here the corresponding expressions for the steady state shear stresses
and the Darcy’s resistance
, namely
Simple computations show that the dimensionless steady-state solutions , given by Equations (51)–(56) satisfy the governing Equations (11)–(13) and the corresponding boundary conditions. By substituting into relations (51)–(56), one obtains the dimensionless steady-state solutions corresponding to MHD motions of incompressible Newtonian fluids induced by the two plates that apply oscillatory shear stresses to the fluid through a porous medium.
3.2. Special Case
By substituting
the Heaviside unit step function
into Equation (43), one obtains the dimensionless starting velocity
corresponding to the fluid motion induced by plates that apply the dimensional shear stress of the form
to the fluid. This starting velocity, which can be obtained by making
, an expression of
, can also be written as the sum of steady and transient components, i.e.,
in which
An equivalent form for the steady component
, namely
has been directly determined by solving the governing equation corresponding to this motion with the associate boundary conditions. The corresponding steady shear stress
and the Darcy’s resistance
are also given by the simple relations
In all cases, similar solutions corresponding to the same motions of ECIMFs in the absence of the magnetic field or porous media are immediately obtained by substituting
or into the general solutions. If both the magnetic field and porous medium are absent, Ha and
K have to be zero in the respective solutions. The last three relations, for instance, take the simple forms.
Consequently, the steady shear stress is constant across the whole flow domain.
4. Exact General Solutions Corresponding to the Fractional Model (FECIMFs)
In order to avoid possible confusion, we denote, using
, the non-dimensional velocity and shear stress fields and, using
, the corresponding Darcy’s resistance, which characterize the MHD motions of FECIMFs through a porous medium between two infinite horizontal parallel plates that applies shear stresses of the form
to the fluid. Here,
is the Mittag–Leffler function with two parameters. For
, the two shear stresses from relations (65) reduce to those from Equation (2). The three entities
have to satisfy the governing Equations (11), (18), and (19); the initial conditions (15); and the boundary conditions
By applying the Laplace transform to Equations (18) and (19), and bearing in mind the identity (21) and boundary conditions (15), one obtains the following relations
between the Laplace transforms
. By substituting
and
from Equation (68) into (22), one finds the following ordinary differential equation
for
. Here, the function
is given by the relation
For , the function becomes identical to the function from Equation (26).
By making the change in the unknown function
and following the same method as in the
Section 2, one obtains for the Laplace transform
of
the expression
in which
For , the function becomes identical to the function from Equation (33).
In order to find the velocity field
, we need the inverse Laplace transforms of
and
. Using the identity (A5) from
Appendix A and
can be written under suitable forms, namely
in which
The inverse Laplace transforms of
and
are given by the relations
where
and
are the inverse Laplace transforms of
and
, respectively.
The inverse Laplace transform
of
, namely
has been obtained by observing
as a compound function, i.e.,
The function
from Equation (79) is given by the relation
in which
, defined using Equation (A6) from
Appendix A, is the Wright function.
By substituting
from Equation (81) in (79) one finds that
Finally, by applying the inverse Laplace transform to (72), and bearing in mind the relations (77), (78), and (82) and the fact that
we find, for the velocity field
, the following expression
The expressions of shear stress
and Darcy’s resistance
, namely
are obtained applying the inverse Laplace transform to Equation (68) and using the identity (A7) from
Appendix A.
In special cases, when
, using the identity (A8) from
Appendix A with
and
it results that the equality (84) takes the simple form
4.1. Special Cases and
By substituting
by
,
, or
into Equation (87), one finds the starting velocity fields
Respectively,
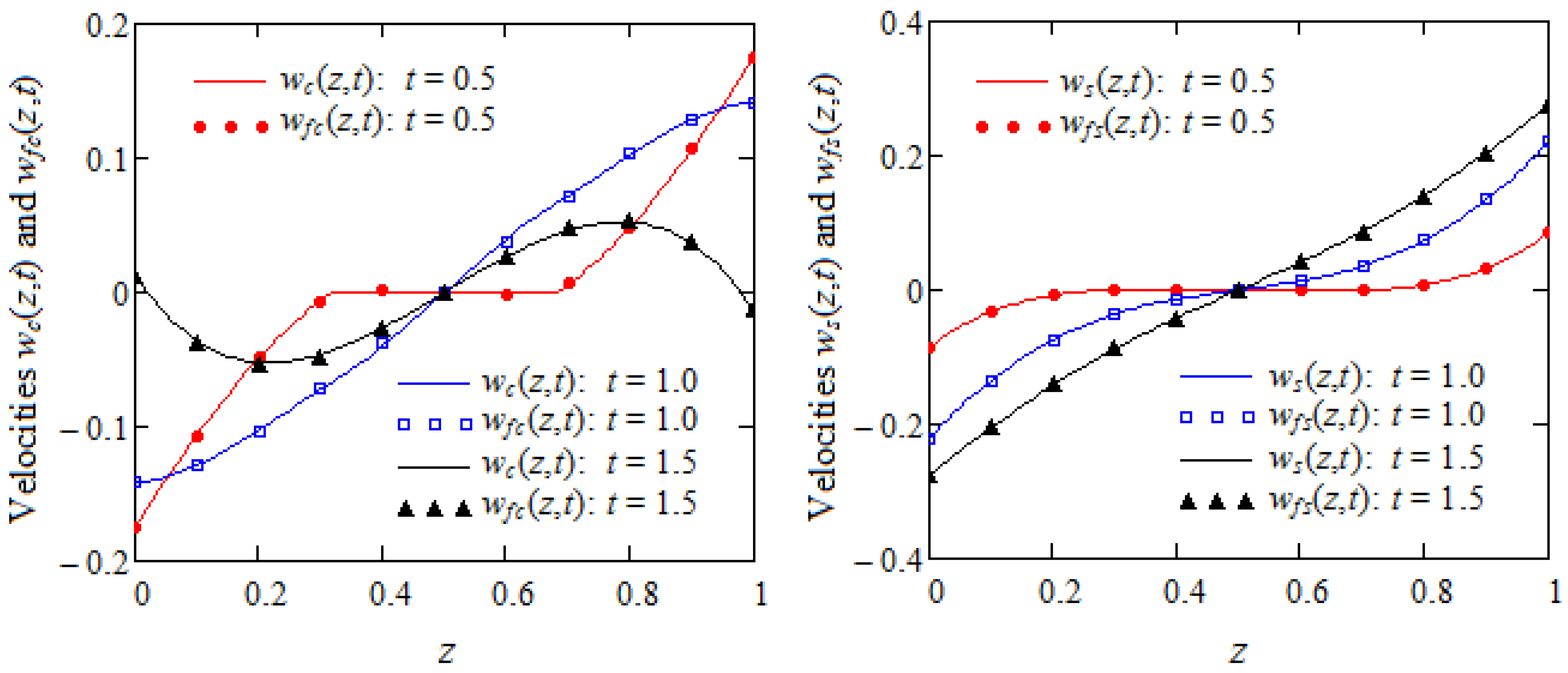
Here, in order to verify the correctness of expressions of dimensionless starting velocities
,
, and
from Equations (88)–(90),
Figure 3 and
Figure 4 are depicted for fixed values of physical parameters and increasing values of time
t and fractional parameter
.
Figure 3 and
Figure 4 (when
clearly show that the diagrams of the starting velocities
,
, and
and corresponding motions of FECIMFs are identical to those of the starting velocities
,
, and
for ordinary fluids.
The corresponding expressions for
,
, and
and
,
, and
are easily obtained using Equations (85) and (86) and the identity (A7) from
Appendix A. Expressions of
and
, for instance, are given by the following relations
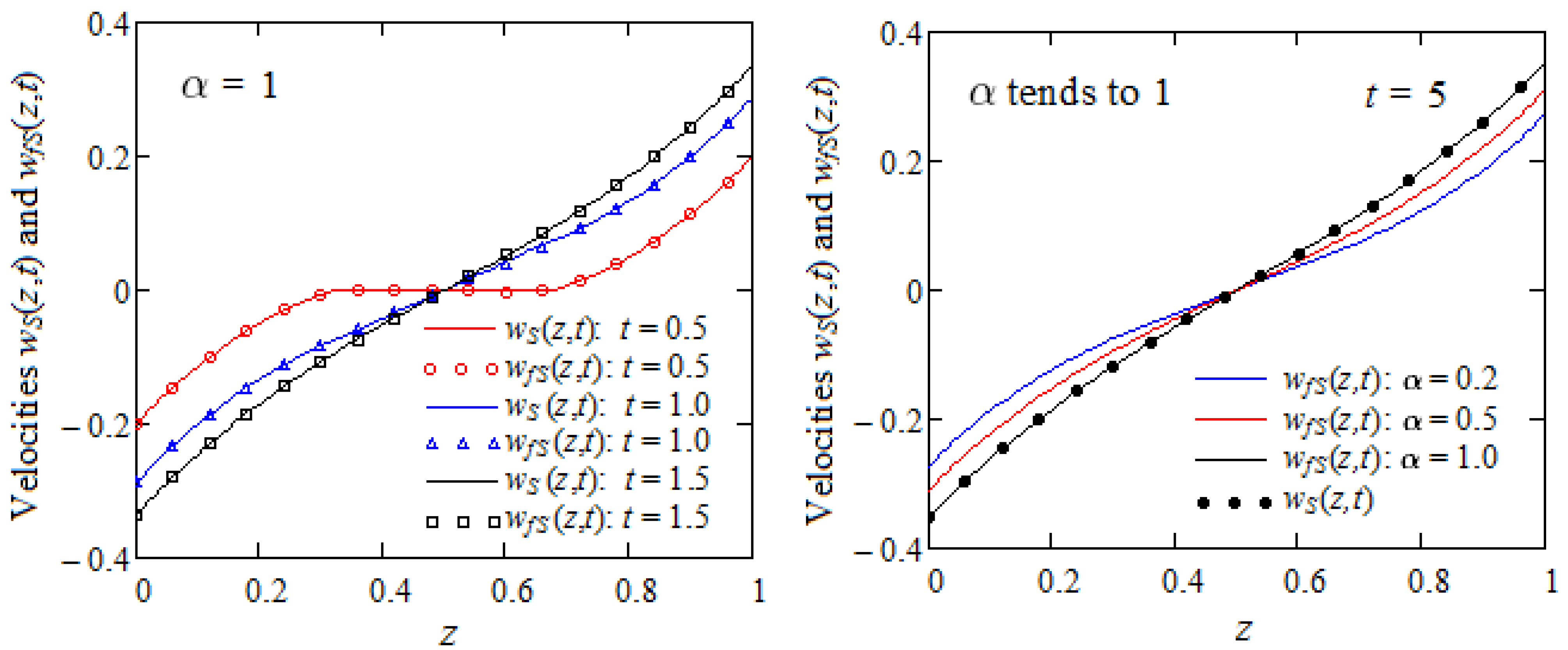
Figure 4 (when
shows that the diagrams of the stating velocity
tend to superpose over the profile of
when the fractional parameter
.
Finally, it is worth pointing out the fact that the dimensionless volume fluxes
as well as
across a plane normal to the flow direction and per unit width of this plane are zero. Indeed, by introducing the expressions of these entities into Equation (17) and evaluating the integral, one obtains the zero value. This result is not a surprise; it is in accordance with the graphical representations presented in
Figure 3 and
Figure 4, in which the profiles of the respective entities are symmetric with respect to the median plane
, and their values in the two parts of the flow domain have contrary signs.
4.2. Steady Solutions for Some Non-Steady Motions of FECIMFs
In
Section 3, it was proved that some unsteady motions of ECIMFs become steady in time. Let us now show that, if the functions
and
have finite limits at infinity, i.e.,
then the corresponding starting solution
given by Equation (84) becomes steady in time. To do this, let us denote, using
, the limit of
when
t tends to infinity if it exists and use the identities (A8) and (A9) from
Appendix A. Consequently, multiplying Equation (72) by
s, taking the limit of result when
and using the relations (93), one finds that
Here, by using the identity (A8) from
Appendix A and
, it is not difficult to show that
Using relations (94) and (95), one obtains the expression of the steady solution, namely,
In the particular case when
the above relation becomes
where
. In the case when
and
, the steady solution
from Equation (97) becomes equal to
from Equation (59). Consequently, the steady solutions
and
and the corresponding MHD motions of ECIMFs and FECIMFs, respectively, through a porous medium between infinite horizontal parallel plates, are identical.
5. Some Numerical Results and Conclusions
Exact general solutions are first time obtained for MHD unsteady motions of ECIMFs when differential expressions of the non-trivial shear stress are prescribed on the boundary. Such boundary conditions, as specified by Renardy [
24,
25], are specific for motions of rate-type fluids. The motions that have been considered here take place in a porous medium between two infinite horizontal parallel plates. Closed-form expressions are determined for the dimensionless starting velocity and the corresponding shear stress and Darcy’s resistance for both ordinary and fractional fluids. For illustration, as well as for the validation of the results, three particular cases are considered, and the starting velocities corresponding to these motions of ordinary fluids are presented as sums of their steady and transient components. For validation, the steady components of velocities are presented in different forms, the equivalence of which is graphically proved in
Figure 2. We would also like to emphasize the fact that exact solutions can be used to verify numerical methods that are developed to study more complex motion problems.
It is worth pointing out the fact that the three motions of ECIMFs become steady in time, and an important problem for experimental researchers is to know the time after which the steady state is touched. A similar problem could be discussed for the unsteady movements of FECIMFs. More exactly, one must verify whether these motions become steady or not. To do that, we showed that a large class of unsteady motions of FECIMFs becomes steady in time. More precisely, if the two functions and that appear in the boundary conditions (16), (66), and (67) satisfy the conditions (93), the corresponding motions of FECIMFs become steady in time, and the expression of steady velocity is given by Equation (96). In addition, if , the steady component given by Equation (97) becomes identical to Equation (59).
Here, in order to bring to light some characteristics of the behaviour of the fluids in the discussion,
Figure 5,
Figure 6,
Figure 7 and
Figure 8 are prepared for fixed values of physical parameters and increasing values of
z and
t and the fractional parameter
. The convergence of the starting velocity
to its steady-state component
is shown in
Figure 5 for
,
and 0.9, and increasing values of time
t.
The profiles of tend to superpose over the profile of for increasing values of time t. They become almost identical at moment when and for . Consequently, the need for time to reach the steady state diminishes for increasing values of . This means that the steady or permanent state is rather touched for motions of the fractional fluids in comparison to ordinary fluids.
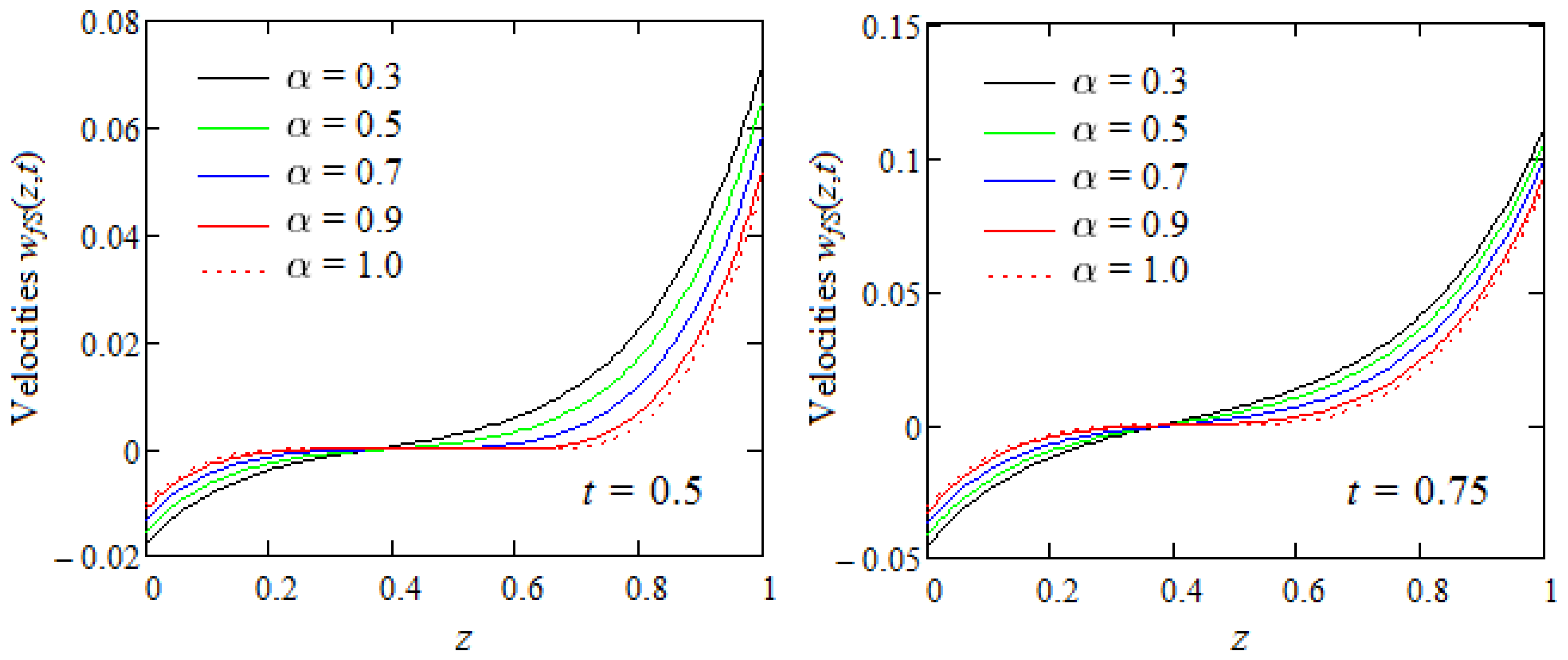
Figure 6 presents profiles of the dimensionless starting velocity
for increasing values of the fractional parameter
at two different times. In both cases, the fluid velocity is an increasing function with respect to the spatial variable
z across the whole flow domain. However, contrary to the rule, a part of the fluid flows in one direction and the other part flows in the opposite direction. More exactly, there is a critical value
(a little less than 0.4) of the spatial variable
z that separates the two flow zones. In the first zone, adjacent to the lower plate, the fluid velocity is an increasing function
.
An opposite situation appears in the other zone adjacent to the upper plate. Consequently, the ordinary fluids flow slower in comparison to the fractional fluids across the whole flow domain. In addition, as expected, fluid velocity increases over time.
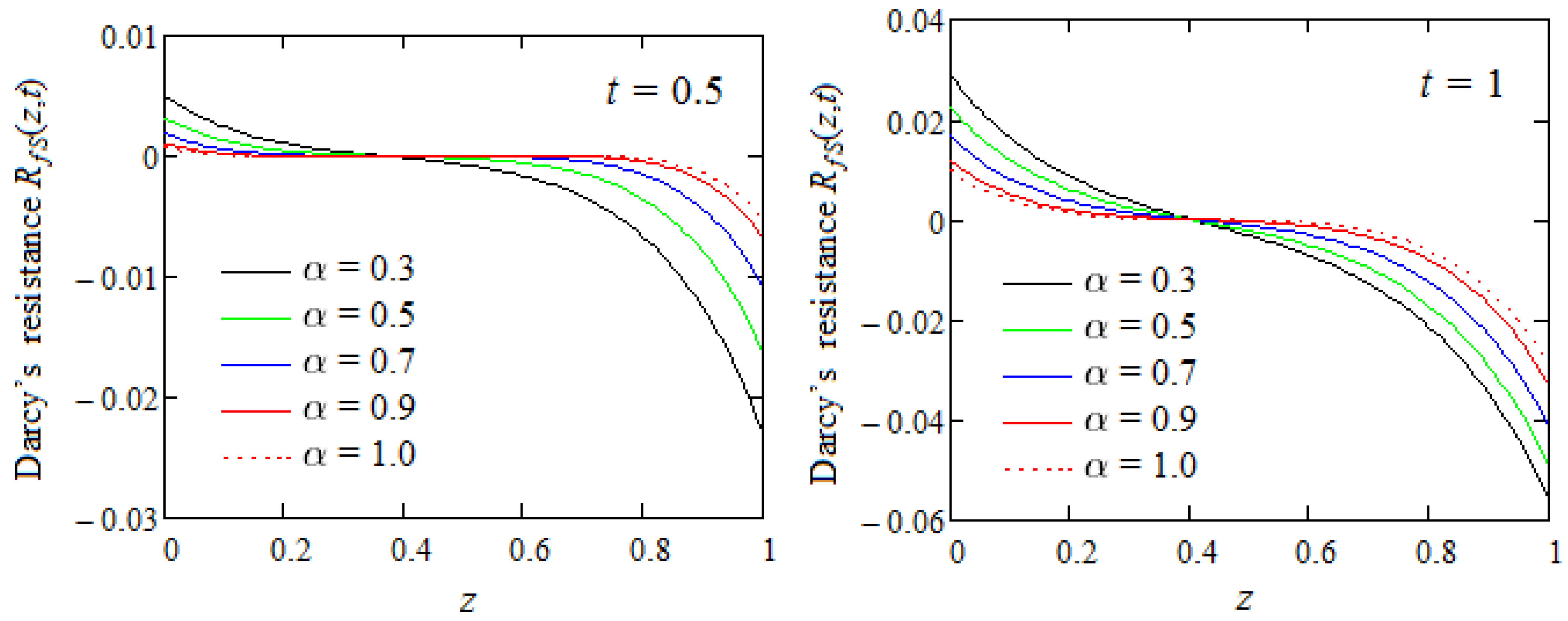
Figure 7 presents the profiles of Darcy’s resistance
with the same values as the physical parameters shown in
Figure 6 and increasing values for the fractional parameter
. As expected, the predictions of these figures are in correlation with those from
Figure 6. For instance, the starting resistance
is a decreasing function with regard to the fractional parameter
across the whole flow domain and its values, contrary to those of
, are positive in the inferior zone of the channel and negative in its upper part.
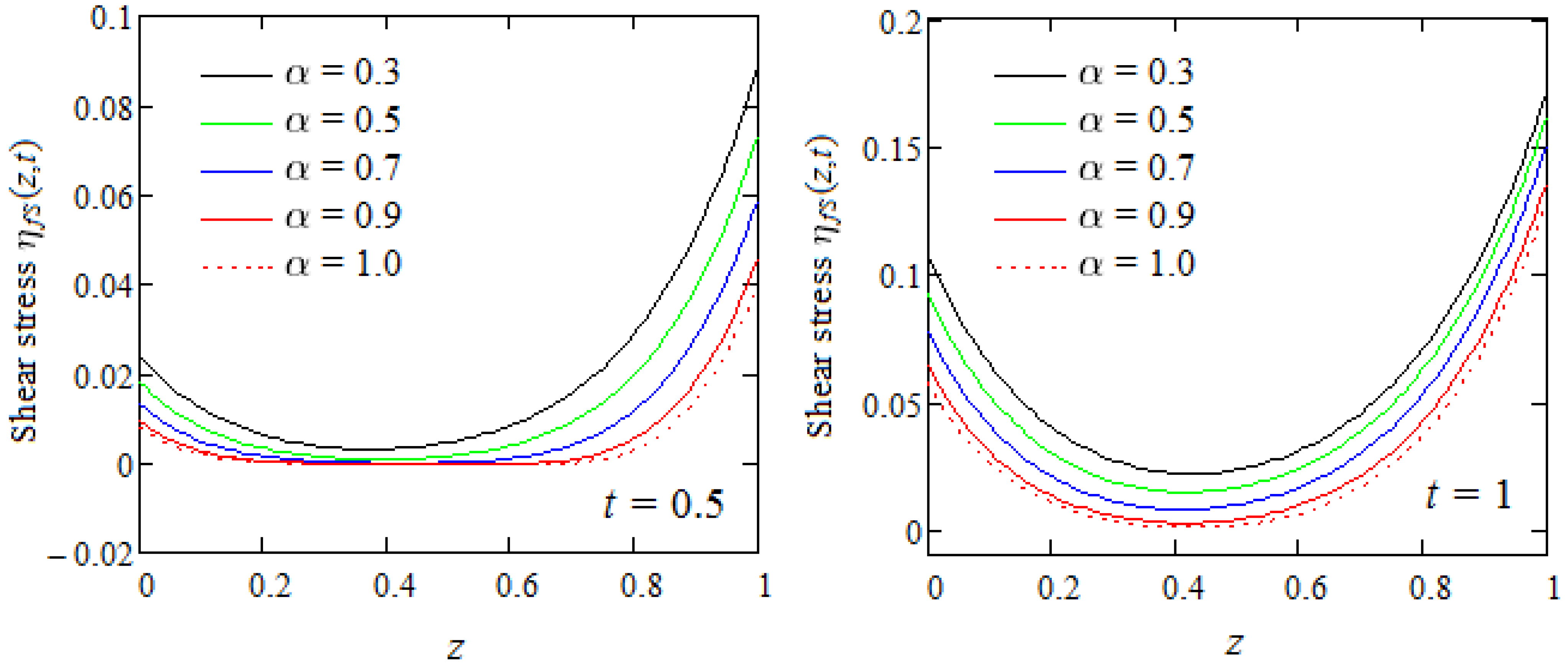
Last
Figure 8 presents profiles of the dimensionless shear stress
when
and
for increasing values of the fractional parameter
.
In both cases, the shear stress is a decreasing function with respect to across the entire flow domain. For each value , it diminishes from maximum values on the lower plate up to minimum values around the value of the spatial variable z and then increases on the rest of the flow domain. The shear stress , unlike the fluid velocity , which has opposite signs on the two zones of the flow domain, is positive everywhere.
The most important results that were obtained herein are as follows:
- -
General solutions were established for some MHD unidirectional motions of ECIMFs and FECIMFs between infinite horizontal parallel plates incorporated into a porous medium when differential expressions of non-trivial shear stress were prescribed on the boundary.
- -
The correctness of the obtained results was graphically proven for the fluid velocity both for motions of ordinary fluids and fractional fluids.
- -
It was proven that a large class of unsteady motions of FECIMFs becomes steady in time.
- -
A steady state corresponding to the motion due to a constant differential expression of shear stress on the boundary was obtained for ECIMFs rather than FECIMFs.
- -
Some important characteristics concerning the behaviour of fractional Maxwell fluids were graphically brought to light and discussed.
- -
It is worth mentioning that in such motions, contrary to the usual rule, the fluid flows in a direction on one part of the channel and in the opposite direction on the other part.
- -
Volume fluxes across a plane normal to the flow direction per unit width of this plane are zero for the previously studied motions of both ECIMFs and FECIMFs.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}