1. Introduction
The present paper addresses a specific problem of optimal error quantification for robust control. Robust control deals with systems under uncertainties and external disturbances. The theory of robust control emerged in the 1980s, and by the mid-1990s, basic results on robust stability and robust performance had been obtained [
1]. Robust control synthesis requires not only a nominal model, but also a quantification of the uncertainty in that model [
2]. Problems of finding a nominal model and error quantification were recognized as the main problems of system identification for practical applications of the robust control theory [
3,
4]. These problems have remained an open issue until the present time both in online and offline settings [
5,
6]. The main distinction arises from deterministic models of external disturbances and uncertainties in robust control theory, as opposed to the predominant use of stochastic external disturbances and the absence of uncertainties in identification theory.
The model of deterministic external disturbances is used in system identification under the set-membership approach, where upper bounds on magnitudes of disturbances are assumed to be known a priori [
7]. The assumption of known upper bounds was criticized for “conservatism of bounds, sensitivity of bounds to accuracy of prior information, and difficulty in providing prior information” [
2]. It was noted in [
8] that “The activity on estimation of uncertainty sets was often erroneously put under the umbrella of identification for control, since in most of this work the control objective was not taken into account in the identification design”. Difficulties in accounting for control objectives when quantifying errors are inevitable in
robust control theory, a dominant area of robust control that corresponds to the
signal space. This challenge arises because direct representations for control criteria have not been derived in
theory. Consequently, problems related to optimal error quantification in
theory have either never been considered or have been addressed using artificial identification criteria, such as minimizing a convex linear combination of upper bounds on uncertainty and disturbance [
9,
10].
The traditional set-membership approach to system identification under known upper bounds of disturbances excludes problems of error quantification. It was used mainly for computation of various upper and lower polyhedral, ellipsoidal or other estimates of the sets of unknown control system parameters consistent with measurement data. Rare applications of these estimates to control problems are of a heuristic nature and do not have a strict mathematical background. Nonconservative and strictly proven stabilization of the linear time-invariant plant with an unknown matrix of the state equation under bounded external disturbance and measurement noise with unknown upper bounds was recently proposed without the direct use of any identification [
11]. In this paper, set estimation and error quantification are “hidden” in the
optimization problem associated with a linear representation of the current state
through the previous states
and require additional storage of the previous controls
.
The present paper addresses the problem of optimal error quantification in the framework of the
theory of robust control, which corresponds to the model of bounded external disturbances and the
signal space. In the
robust control theory, basic results on robust stability and robust performance were presented in [
12,
13] and direct representations for the steady-state tracking error were obtained in [
14,
15,
16]. These results opened the door for using the control criterion as the identification criterion in problems of error quantification and synthesis of adaptive optimal control [
17]. The problem of model evaluation on the basis of error quantification for robust steady-stated tracking was considered in [
18] in an offline setting for the discrete-time plant, with the linear time invariant nominal model under coprime factor perturbations, bounded external disturbance, and measurement noise with unknown upper bounds.
In the present paper, the problem of error quantification is considered in the more advanced optimal setup. Upper bounds of the gains of coprime factor perturbations and biased external disturbance in a discrete-time minimum phase plant are assumed to be unknown. The control criterion is the worst-case upper bound of the steady-state tracking error. This criterion is proven to be linear-fractional with respect to the unknown parameters. The solution of the problem under a known bias of the external disturbance is based on treating the control criterion as an identification criterion and on recursive computation of polyhedral estimates, consistent with measurement data, of unknown upper bounds and gains. Since linear-fractional programming is reducible to linear programming [
19], the optimal error quantification becomes computationally tractable online. Polyhedral estimates of unknown parameters are described by linear inequalities with respect to these parameters. Due to the choice of a sufficiently small dead zone parameter, the optimal error quantification is solved with a prescribed accuracy and the number of possible updates of the polyhedral estimates is finite.
The remaining contents of the paper are organized as follows. Key notation is described at the end of the Introduction. A model description and a preliminary problem statement are presented in
Section 1. Representation for the steady-state tracking error of the optimal closed loop system in the framework of the
theory of robust control is derived in
Section 3. The problem of optimal error quantification under a known bias of the external disturbance is strictly formulated in
Section 4 and its solution with a prescribed accuracy is described in
Section 5.
Section 6 presents simulations and comments on them. Robust steady-state tracking under an unknown bias of the external disturbance is discussed in
Section 7.
Section 8 concludes the paper.
Notation 1. – the Euclidean norm of the vector ;
– the vector space of real sequences ,
for ;
;
– the normed space of bounded real sequences ,
for ;
,
– the normed space of absolutely summable sequences,
for ;
– the induced norm of stable linear time-invariant system with the transfer function .
2. Model Description and Preliminary Problem Statement
Let the model of the controlled discrete-time plant be described by equation
where
is the output at the time instant
t,
is the control,
is the total disturbance,
and
is the backward shift operator (
). Initial values
are arbitrary,
for
, and
for
.
The polynomials and characterize the known nominal model of the plant and the roots of are outside the closed unit disk of the complex plane (such a plant is called minimum phase).
The total disturbance
in (
1) is modeled in the form accepted in the
-theory of robust control
In (
2),
describes the bounded external disturbance, where
is its bias,
is an unknown normalized real sequence,
is the upper bound of unbiased disturbance. The last two terms in (
2) represent coprime factor perturbations satisfying inequalities
The real numbers
and
are the gains (i.e., the
-induced norms) of uncertainties in output and control, respectively. Normalized uncertainties
are unknown strictly causal nonlinear time-varying operators [
12]. The parameter
in (
3) describes the memory of the uncertainties
and
and can be chosen by the controller designer to be sufficiently large without introducing excessive conservatism into the disturbance model (see Comment 1 to Theorem 1 in
Section 3). One can show (see Lemma 4 [
14] and Lemma 1 [
17] for details) that the description of the total disturbance
v in the form (
2) and (
3) is equivalent to the description
Preliminary problem statement. The vector
of the parameters of the total disturbance
v is assumed to be
unknown and the problem under consideration is to provide the online optimal error quantification in the framework of the robust control theory in the
setup.
3. Optimal Robust Tracking under Known Nominal Model
Let us introduce the notation for the vector of known parameters of the nominal model.
Let
be a given bounded reference signal and the control criterion is the worst-case steady state tracking error
where sup is computed on the set
V of the total disturbances
v of the form (
2), (
3). Note that specific values
of the total disturbance
v are determined by specific admissible values
,
, and
.
Consider the controller described by the equation
Then we have for the tracking error in the closed loop system (
1) and (
6)
Due to the unpredictability and arbitrariness of the values of the right-hand side in (
7) at the time of computing the control
, it follows that the controller (
6) is optimal for the control criterion (
5).
Let us introduce notation for the transfer function from
y to
u of the controller (
6)
and rewrite the controller equation (
6) as follows
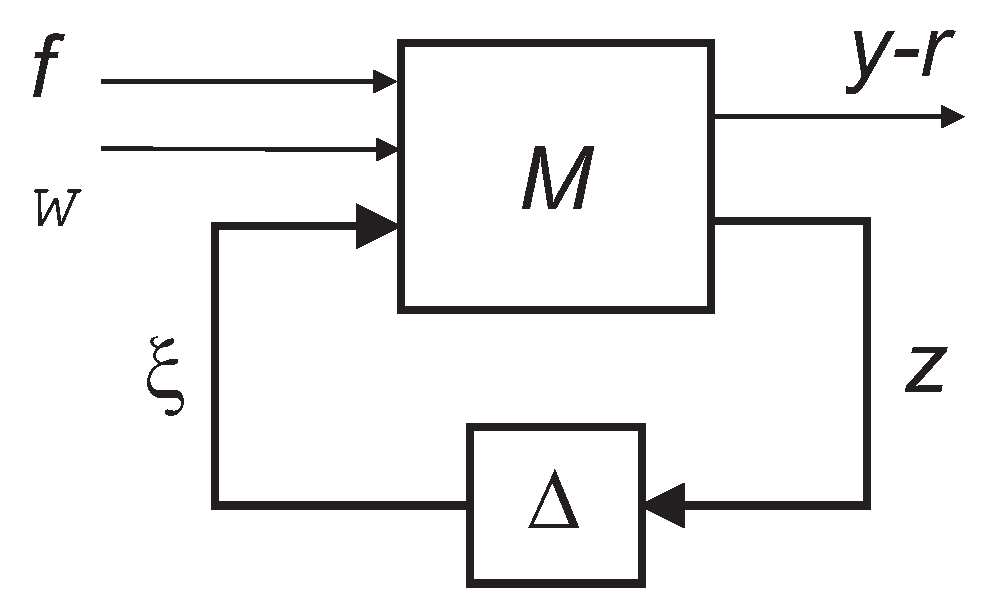
Definition 1. The closed loop system (1) and (6) is said to be robustly stable if . Definition 2. We will say that the sequence gets into neighborhoods of uniformly often, if for arbitrary there exists and a sequence so that The performance of the optimal closed loop system (1) and (6) is described in the next theorem. Theorem 1. The following statements are true for the closed system (1) and (6). (1) The system with infinite memory (i.e., ) perturbations is robustly stable if and only if For the system with and zero initial data (2) For the system with and arbitrary initial data ,If the sequence gets into neighborhoods of the limsup uniformly often, then for any initial datawhere the sign ↗ means the monotonic convergence from below as . Proof. To prove Theorem 1, we represent the closed loop system (
1), (
6) in the standard
form shown in
Figure 1 and described by equations
where
z and
are, respectively, the input and output of the structured uncertainty
,
and
f is a fixed input signal including the tracked signal
r and a constant signal equal to 1 to account for the bias
:
Let us represent the matrix
M in (
13) in block form corresponding to the input and output signals in
Figure 1:
For the system (
1), (
6) this presentation is of the form
where
q is the forward shift operator (
). The first row of the matrix
M in (
15) corresponds to the right-hand side of the equality (
7). The second row of
M is obtained by moving
to the right-hand side of the equality (
7). The third row of
M corresponds to the representation of the optimal controller in the form (
8).
The necessary and sufficient condition for robust stability (
9) follows from Theorem 7 in [
16] applied to the system (
1), (
6).
To prove the representation (
10) for the control criterion
, it suffices to apply Theorems 5 and 6 of [
16]. Let us introduce the notation
for an arbitrary
matrix
A of impulse responses
.
For the block matrix
M in (
14), we define
The matrix
for the specific matrix
M in (
15) takes the form
According to Theorem 5 in [
16],
Applying the formula (
17) to the matrix (
16), we get
Considering that
we obtain the representation (
10)
The inequality (
11) follows from the fact that the set of perturbations (
3) with bounded memory
is a subset of perturbations with infinite memory. The monotonicity of
with respect to
follows from the enlargement of the sets of perturbations (
3) with the increase of
. Finally, the convergence of
to
is guaranteed by Theorem 6 in [
16]. Theorem 1 is proved. □
Theorem 1 provides the guaranteed upper bound for the steady-state tracking error, and this upper bound is tight, e.g., for common periodic or constant reference signals.
Remark 1. The bounded memory perturbation model (3) was proposed in [16] instead of the finite or fading memory perturbation models introduced in [14] because the latter are not testable against data. The model of bounded memory perturbations needs the computation of and for the purpose of online estimation and this computation, even for large μ, is not a considerable problem for modern computers. The larger the memory size μ chosen by the control designer, the less conservative the upper bound (11). At the same time, choosing too large values of μ makes little sense in real applications. 5. Optimal Online Error Quantification
Let us introduce the notation
Lemma 1. Let be some estimate of δ. Iffor all sufficiently large t, then the output of the closed loop system (1) and (6) satisfies the inequality Proof. Let us define a sequence of imaginary total disturbance
Then the output
y satisfies the equation (
1) with the total disturbance
and
for all sufficiently large
t in view of (
20). Since violations of the inequalities (
22) are possible on finite initial time intervals only, one can apply the second statement of Theorem 1 to the closed loop system with the total disturbance
and get the inequality (
21). Lemma 1 is proven. □
At time
t, complete information about the unknown vector
in the closed loop system (
1) and (
6) is in the form of the set estimate
Then the best estimate of
, unfalsified by data
, is as follows
The inequalities in the description of the set estimates
can contain redundant inequalities, which can be excluded online (see, e.g., [
20]). Despite this, the number of inequalities in the description of
can increase without limit as
. To avoid an unlimited increase in the number of stored inequalities, we will solve the problem (
23) with the prescribed accuracy.
We choose a positive number
, which should be sufficiently small and characterizes the size of the dead zone when updating the outer set estimates
of the unknown vector
. At each time instant, a set estimate
and a vector estimate
will be computed. The estimates
and
are defined as follows.
We introduce the notation
and rewrite the inequality (
20) that presents new information about the unknown vector
at the time instant
in the form of the inclusion
Let
and
be the set and vector estimates of
at the time instant
t, respectively. Define
Geometric interpretation of the updating (
25) is simple. The set estimate
is updated by adding the new inequality from (
24) if and only if the distance from
to the half-space
is greater
. Note that the vector estimate remains the same, i.e.,
, in the case
.
Theorem 2. Let Assumption 1 be satisfied and the chosen dead zone parameter ε in (25) satisfy the inequalities Let the set estimates and the vector estimates be computed in the closed loop system (1) and (6) according to (25) and (26). Then the number of updates of the set estimates and the vector estimates is finite and the output y of the closed loop system satisfieswhere is the final value of ,and Proof. Under each updating
, we have from (
25)
Then for any
,
and, therefore,
. This means that the distance from the vector estimate
to the half-space
is greater than
. Since
, the distance between
and
is greater than
. Then the distance from
to all future estimates
is greater than
because
. Then the number of updates of
and
cannot be infinite if the sequence of estimates
is bounded, since each update of set estimates excludes disjoint balls with a radius of
and with centers at
. The sequence of estimates
is bounded because the set
} is bounded and
for all
t in view of (
26). The inequality (
29) follows from (
26) and the inclusions
for all
t. The inequality in (
28) is guaranteed by Lemma 1 for
. Finally, the equality in (
28) follows from the inequality
the definition of
, and the monotonicity of
with respect to the components of
. Theorem 2 is proven. □
Remark 2. The main merit of the presented algorithm (25) and (26) of optimal online error quantification is it that, consistent with the measurement data , it provides a nonconservative upper bound for the steady-state tracking errorwhich follows from (21) and (29) and where the value of corresponding to the “true” vector δ is not known. Remark 3. To guarantee the desired accuracy of error quantification, one can compute the differencesTaking into account the inequality (since for all t, see the proof of Theorem 2), we getIf the current difference is greater than the desired accuracy, one can choose a smaller (half as much, for example) dead zone parameter ε. The desired accuracy will be guaranteed after several corrections of ε, if they ever occur. Remark 4. Computation of the estimate in (26) is a linear-fractional problem with respect to . This problem is reducible to linear programming via a standard change of variables [19] and can be solved online. 6. Simulations and Comments
In this section, the problem of optimal error quantification is illustrated by simulations and some comments.
Consider the unstable and minimum phase plant
with the poles
and the zero 1.5 (note, that computational complexity of optimal error quantification (
25) and (
26) is independent of the orders n and m). The total disturbance is modeled in the form
with the parameters
We present simulations with the total disturbance of two kinds.
For
random disturbance and perturbations, the normalized external disturbance
and the coefficients
in (
32) are independent and uniformly distributed on [−1,1].
For
deterministic disturbance and perturbations,
,
, and
are of the form
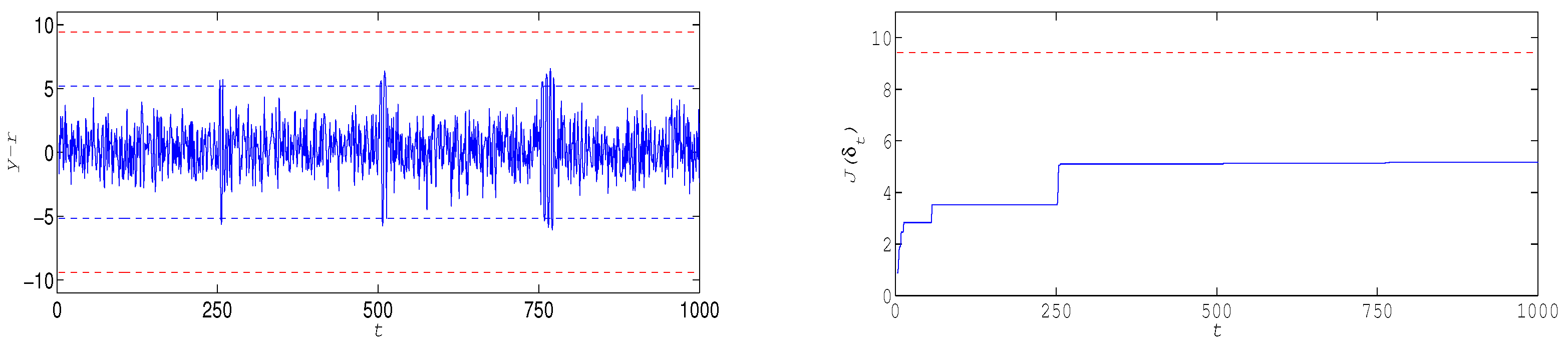
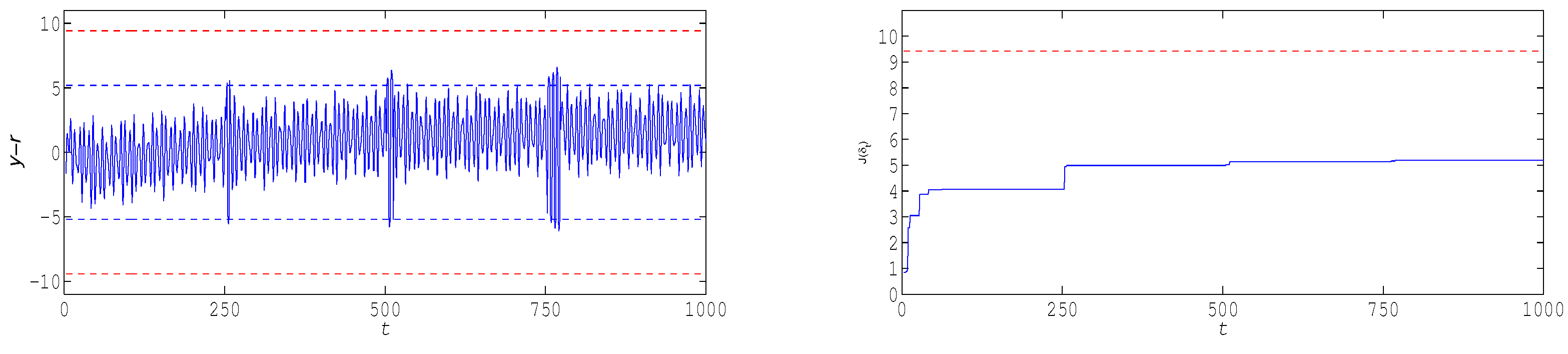
Comment 1. The dead zone parameter in simulations was chosen as , which is three orders of magnitude less than the gains of perturbations . This choice guarantees high accuracy of the solution of the problem of optimal error quantification. Despite being so small, the number of updates of the estimates and in numerous simulations did not exceed 15 on the time interval [1, 1000] and 25 on the time interval [1, 10,000]. The time of each of the numerous simulations on the notebook with the processor i5-7200U CPU @2.50GHz was in the range of 0.6–0.9 s.
Comment 2. In all simulations with the optimal closed loop system (
1) and (
6), the current estimates
were of the form
which corresponds with zero perturbations in the plant. The values of
were in the interval [3.8, 5.4] in all simulations, while the optimal value was near
. Possible reasons for the estimates of the form (
33) seem to be as follows. First, it can be seen that the values of the control criterion
are more sensitive to increasing the gain
of the output perturbations compared with the upper bound
of the external disturbance and even more sensitive to increasing the gain
of the control perturbations. This means that small values of
and
are more preferable in the optimal estimation (
26). Second, the total random and deterministic disturbances
described above are not the worst-case ones that maximize
. The problem of modeling the worst-case total disturbance
is challenging and its solution is unknown.
To make the disturbance and perturbations (
32) worse for the control criterion
, their values in the time intervals [251, 255], [551, 560], and [751, 770] were chosen in the form
to maximize each subsequent value of
on these intervals. The bursts of the tracking error
on all presented plots are the result of this local maximizing
. Despite the “locally worst” disturbance and perturbations of the form (
34), the estimates
in the closed loop system (
1), (
6), remained unchanged (
33).
Consider now a more realistic situation where the exact nominal model is unknown, but the controller designer has some estimate of it and the task is to evaluate the quality of the corresponding optima controller on real data. Let the approximated model be of the form
with the parameters
The optimal controller for this model is
The closed loop system (
1) and (
35) without perturbations is stable because the roots −49.5203, −12.9108, and 1.4311 of its characteristic polynomial lie outside the unit disk of the complex plane. Then, for the tracking error in the closed loop system, we have
where
,
, and the last two terms at the right-hand side can be considered as additional output and control perturbations compared with those in (
7). Then the gains
and
of the output and control perturbations in the closed loop system (
1) and (
35) can be estimated, respectively, as
Then the closed loop system (
1) and (
35) is robustly stable. The plots of the tracking errors for the closed loop system (
1) and (
35) under random and deterministic perturbations are presented on the left panes of
Figure 2 and
Figure 3, respectively.
Comment 3. It was noted in the Introduction that the set-membership approach was criticized for conservatism of prior upper bounds [
2]. The optimal error quantification (
25) and (
26) needs no prior upper bounds except the condition of robust stabilizability (
18). This condition is necessary for strict mathematical proof of Theorem 2.
Comment 4. Simulations with the “locally worst” disturbance and perturbations (
34) of maximal magnitudes and inexact nominal model with the respective non-optimal controller (
35) illustrate
additional nonconservatism of the set-membership approach. Indeed, the unfalsified upper bounds
on the tracking error were considerably less than the optimal upper bound
despite disturbance and perturbations of maximal magnitudes (but not the worst-case for the control criterion (
5)). In other words, this approach with optimal estimation is able to take into account a real randomness of disturbance and perturbations. Moreover, simulations with the gains
and
that slightly violate the robust stability condition (
9) showed similar results and really worst-case perturbations seem to be necessary to obtain estimates
closer to the worst-case upper bound
.
Comment 5. Despite the estimates of the form (
33) associated with no uncertainty in the model, the presented plots for the case of non-worst-case perturbations indirectly provide information about the presence of uncertainty
in the closed-loop system. Indeed, if there were no uncertainties in the plant (
1), the tracking error should remain in the intervals
in steady-state. But this is not the case on the presented plots.
7. Suboptimal Robust Tracking under Unknown Bias of External Disturbance
In this section, we show how the optimal error quantification from
Section 5 can be used for suboptimal robust tracking under an unknown bias
of the biased external disturbance.
Let us introduce more detailed notation,
for the control criterion
defined in (
10). Let a priori information on the unknown bias
be of the form
with some known
and
. Let us choose a natural number N and define the grid of tested values
of the unknown bias
as follows:
This grid will approximate the best unfalsified estimate of
with the accuracy
. Now, we will use optimal online estimation (
24) and (
25) for all
in parallel. The control
at the time instant
t is computed by the optimal controller (
6) corresponding to the bias
, where
and
is the estimate of
corresponding to
at the time instant
t.
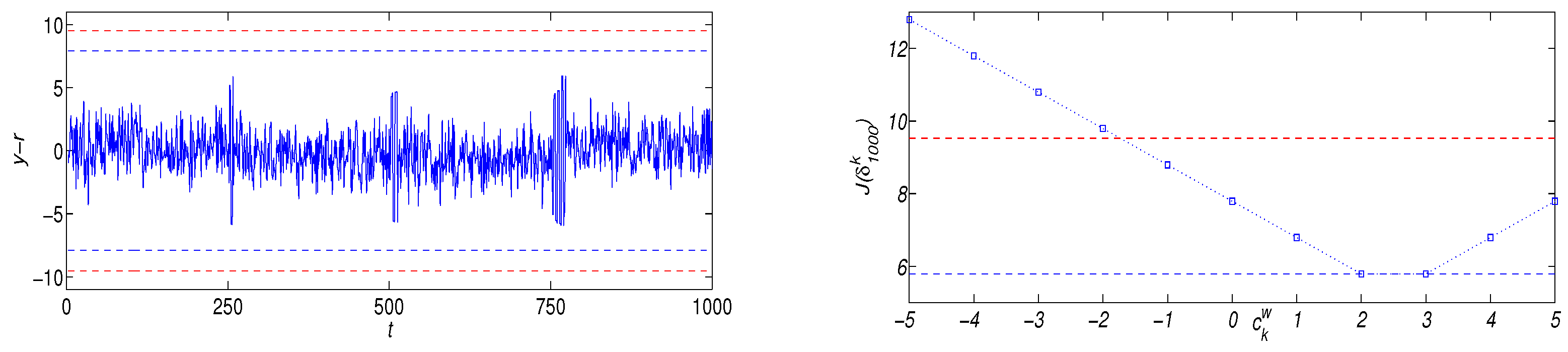
Typical results of applying the described adaptive control under parameters
and random disturbance and perturbations are presented in
Figure 4. Note that
and
are equidistant from
and the estimates
took only these two values, rarely switching between them and, in particular,
on the time interval
. The time of each of the numerous simulations with unknown
was within the interval of 2–4 s.
Note that online estimation of the bias
is a nontrivial problem in both classical adaptive control and the tracking problem under consideration. The described parallel error quantification provided the best estimate
of the unknown
, but the value of
itself is not the best unfalsified upper bound of
corresponding to
. This is seen on the plot of the tracking error
on the left pane of
Figure 4. To compute the best one, it is necessary to leave in the set estimate
only those inequalities from (
24) that correspond to the last estimate
and to delete all others.


{kind=link}
{kind=link}
{kind=link}
{kind=link}