1. Introduction
The sine-Gordon equation, a type of semi-linear wave equation, is utilized to model a range of physical phenomena. This includes the behavior of Josephson junctions, seismic activity such as earthquakes and slow slip and after-slip events, and dislocation within materials. The sine-Gordon equation has recently grown in importance as a class of classical infinite-dimensional nonlinear dynamical systems. The controlled system exhibits high nonlinearity, making finding global or roughly global solutions challenging. Nevertheless, numerous studies have been conducted in recent years to explore the numerical solution of this equation. For instance, Zhou provided a more precise estimate of the dimension of the global attractor for discretization of the damped sine-Gordon equation with the periodic boundary condition [
1]. Three effective energy-conserving compact finite difference schemes for numerically solving the sine-Gordon equation with homogeneous Dirichlet boundary conditions were developed [
2]. Radial basis functions (RBFs) and a finite difference technique were used to derive the approximate solution of the two-dimensional (2D) time-fractional stochastic sine-Gordon equation in non-rectangular domains in [
3].
Energy control problems arise in many disciplines, such as engineering and physics, among others. Examples of these issues have been addressed in previous studies [
4,
5,
6]. While the regulation or tracking of linear models as control objectives has been the focus of the majority of previous efforts, the control of oscillatory modes is one of the main areas of control theory and is inspired by real-world issues such as vibration separation and suppression. Some of the developed techniques can be used to stabilize wave motion and/or other distributed systems. Over the last few decades, control methods addressing regulation and tracking issues for systems described by partial differential equations (PDEs), including optimum control, resilient control, adaptive control, etc., have been proposed. Additionally, during the 1990s, a growing trend that focused on oscillation shaping and synchronization, as opposed to suppression, emerged, bringing forth new research areas. However, until recently, distributed systems and wave control were included in an energy control strategy that was first proposed in [
7,
8] based on the speed-gradient method. The primary reason is that the necessary set energy level might be a complex, unbounded set. However, there has not been much research on the sine-Gordon model of energy regulation in an infinite-dimensional environment. In [
9], the problem of observer-based boundary control of sine-Gordon model energy was investigated. Specifically, a Luenberger-type observer for the sine-Gordon equation was analyzed. The authors not only addressed the observer-based boundary control of sine-Gordon model energy but also provided explicit bounds on the system parameters. These bounds are crucial, as they ensure the exponential decay of the estimation error. This means that in the above study, the authors established specific limits within which the system parameters must lie to guarantee that the error in estimating the system state decreases exponentially over time. Furthermore, speed-gradient output feedback for the energy control of the sine-Gordon model was proposed. The problem was numerically studied in [
10], further supporting the validity of this strategy. The simplest speed-gradient-proportional algorithm performed the best across all three performance criteria (limit error, transient time, and threshold of stability for the sampling interval). The “relay” speed-gradient algorithm was devised and adaptively improved in [
11] by employing state feedback and in-domain actuators. However, these studies were based on continuous systems, and there are not many discrete systems with which to advance research in this field.
Discretization is a crucial process for PDE systems in terms of enabling the application of theoretical results in engineering technology. In most scenarios, a PDE is first discretized into a sequence of finite-dimensional systems represented by ordinary differential equations (ODEs), which are familiar to most engineers. This discretization procedure primarily focuses on the spatial variable while keeping the time variable continuous. In a sense, this process approximates an infinite-dimensional system by using finite-dimensional systems and is referred to as semi-discretization. Secondly, preserving the essential control or geometric properties inherent in the original PDEs is a primary concern during the semi-discretization process.
Therefore, building structure-preserving algorithms and energy-preserving or stability-preserving algorithms is a research hot spot in computational mathematics [
5] and control theory [
12,
13]. For example, the uniform exponential stability of semi-discrete schemes for linear hyperbolic PDEs has been discussed extensively in the past decade (see [
14,
15,
16,
17,
18,
19,
20]). However, there are few results on the uniform asymptotic stability of nonlinear systems. Up until now, research on uniform approximation of nonlinear systems has been primarily concentrated on systems with nonlinear boundary conditions [
12]. The task of approximating the uniformly asymptotic stability of the sine-Gordon system is particularly challenging due to the nonlinear term appearing in system equations.
In our work, the aims are to fill the gap and to tackle this problem for the first time by establishing suitable discrete time-domain energy multipliers. More precisely, the sine-Gordon system was investigated from the viewpoint of numerical approximation, in line with previous studies [
15,
16]. A new finite difference scheme that is both energy- and stability-preserving was designed for the sine-Gordon equation. For this purpose, the PDE component was first numerically discretized, and it was turned into a family of ODEs. Subsequently, the uniform stability of this family of discrete systems was studied, i.e., whether or not the discrete energies uniformly converge concerning the mesh size. To validate uniform stability, the common approach is to follow each step of the continuous case (see, for instance, [
15,
16,
18,
20]). The discrete multiplier method was utilized to obtain the uniform stability of the discrete system. Moreover, to cope with the nonlinear term of the model, a discrete Wirtinger inequality suitable for our approximating scheme was established.
Based on the above, the novelty of this work is two-fold. First, an appropriate numerical approximating scheme for a nonlinear PDE that is both energy-preserving and stability-preserving was designed. Secondly, we generalized the conclusions reported in [
15,
16,
20] from the exponential stability of linear models to the asymptotic stability of nonlinear systems.
This remainder of this paper is organized as follows: In
Section 2, the problem formulation is presented, and relevant definitions and the control algorithm are introduced. In
Section 3, an order reduction method is utilized to transform the sine-Gordon equation into an equivalent system, and a suitable semi-discretization system is designed. The main result of this study is then presented. In
Section 4, the several numerical experiments conducted to demonstrate the effectiveness of the numerical approximating scheme are presented. In
Section 5, some conclusions and remarks are presented.
2. Problem Formulation and Speed-Gradient Control Law
Consider the one-dimensional sine-Gordon equation incorporating initial conditions and boundary control mechanisms.
where
is the time variable,
is a spatial variable,
represents the first-order derivative with respect to the time variable,
represents the first-order derivative with respect to the spatial variable,
and
,
are given functions,
is a control input, and
is the output.
is the Hamiltonian that corresponds to the sine-Gordon equation. The quantity (
) is conserved along solutions of the unforced system (see (
19)). In addition,
is greater than or equal to zero, and
equals zero only when
is equal to zero. As a result,
can be thought of as the energy at time
t, and
is replaced with
.
A control law (
) must be identified that will make the energy of the system (
1)–(4) conform to the expected value (
) (see also [
21]), taking the following form:
Let us design a control law that addresses the energy control issue using the Speed-Gradient (SG) approach ([
22,
23]). First, we introduce the goal function, i.e.,
which is the difference between the present and required energy. The derivative of this function is
Substituting
for
and integrating the term
by parts, one obtains
Thus, the boundary condition (
) yields
In the second step, the gradient (
) of
with respect to the component (
) is derived as
In the third step, the vector function (
) is selected to satisfy the acute angle condition (
). The following control law results from this:
where the scalar gain is defined as
. A more generic control algorithm is expressed in the following form:
where
is a continuous function such that
and
for
.
4. Numerical Analysis
In this section, we first show that the semi-discretized finite difference scheme (
20)–(24) for an equivalent system (
13)–(17) can also yield a semi-discretized finite difference scheme for the original system (
1)–(4).
Lemma 6. Let be a solution of system (1)–(4). The semi-discretized average-central finite difference scheme (20)–(24) can be used to numerically solve the original system (1)–(4) as follows:where represents approximations of for . Proof. It follows from
and
that
By multiplying both sides of the Equation (
20) by
, one obtains
Then, combining with (
52), for
we have
Eliminating the variable
, one obtains
which yields the first equation of (
51). Setting
in the first equation of (
54) derives
amd with the right boundary of (24), the second equation of (
51) is derived. The left boundary condition and initial conditions are trivial. The proof of the lemma is complete. □
In order to perform numerical simulations, the first choice of the approximation of the nonlinear term (
) is
for
. In this case, (
51) becomes
The discrete scheme (
57) should be rewritten as a state space formulation. For this purpose, we define
matrices as follows:
and
with
belonging to
. Then, (
51) can be rewritten respectively as the vectorial forms:
where
,
,
.
By setting
the differential Equation (
57) is then equivalent to
with
and
. Note that
is evidently invertible (see [
24]), but it corresponds to the average operator. If
is replaced by the identity operator (
I), the system (
61) would not contain the average operator, and the corresponding scheme restores the classical finite difference for the original system (
1)–(4).
The significance of the discrete scheme (
61) is discussed here. We present thee plots in
Figure 1,
Figure 2 and
Figure 3.
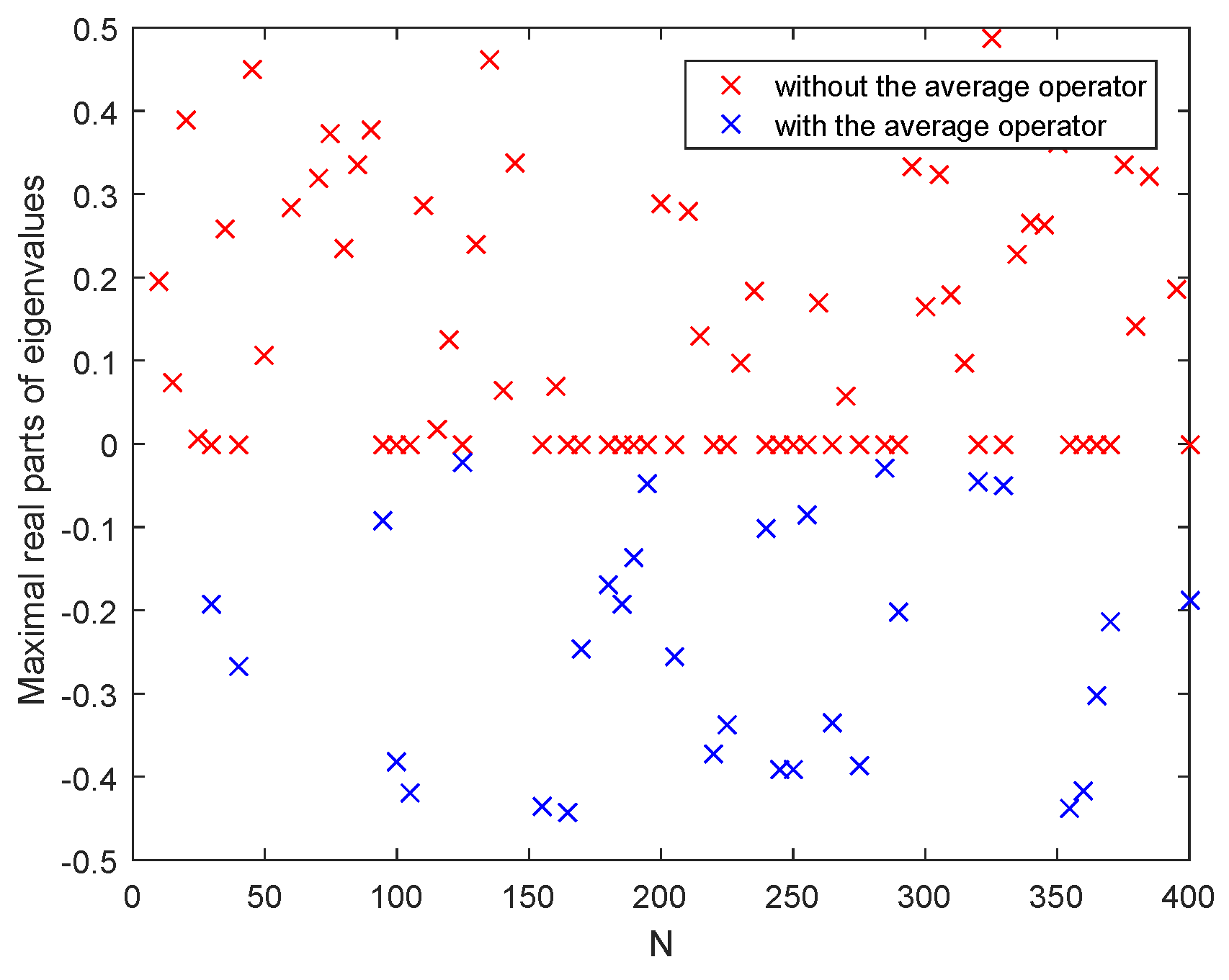
Figure 1 depicts the maximal real parts of
(with the average operator) and
(without the average operator) for
.
Figure 2 depicts the distributions of the eigenvalues of
and
in which
. In
Figure 1 and
Figure 2, the feedback control (
a) is set as a random number located within the interval of
. It is easy to see from
Figure 1 that the maximal real parts of the eigenvalues of
are almost negative, and those of
are positive. This means that the classical finite difference does not preserve uniform asymptotic stability. This is in accordance with the analysis reported in [
24]. However, the average-central finite difference scheme (
20)–(24), which corresponds to
, may be uniformly asymptotically stable. This matches the main result of Theorem 1. Moreover, the importance of the feedback control gain (
) is reflected through
Figure 1 and
Figure 3. If
a is fixed at
, the stability of the average-central finite difference scheme (
20)–(24) is still preserved, and the maximal real parts of
are almost the same. The other parameters are selected as
in these figures.
In the next numerical simulations, the second choice of the approximation of the nonlinear term (
) is
for
. In this scenario, (
51) becomes
The state space formulation of the discrete scheme (
62) is expressed as follows:
with an
matrix as follows:
Moreover, the differential Equation (
62) is then equivalent to
with
and
Figure 4,
Figure 5 and
Figure 6 are plotted for the discrete scheme (
65) as above. The
k,
,
, and
a parameters are the same as above. From these figures, it is easy to see that the discrete schemes ((
61) and (
65)) are similar. However, discrete scheme (
65) is simpler than (
61) and has lower computational costs. This implies that (
65) is a more optimal approximation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}