
Sliding Mode Control of a Class of Hybrid-Switched Systems with Disturbances


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- We address the SMC problem for a category of switched systems with matching disturbances. By using a state transformation and proposing a sliding mode surface function, we construct the sliding mode equation for the switched system.
- (2)
- We present sufficient conditions for the exponential stability of switched sliding mode equation using Lyapunov function theory and ADT method.
- (3)
- Based on the characteristics of sliding mode control for switched systems, we devised a sliding mode controller for guaranteeing the convergence of the closed-loop system to the sliding mode region. Using an example, this conclusion is demonstrated to be valid.
2. System Description and Problem Statement
3. Controller Design and Stability Analysis
4. Sliding Mode Controller Design
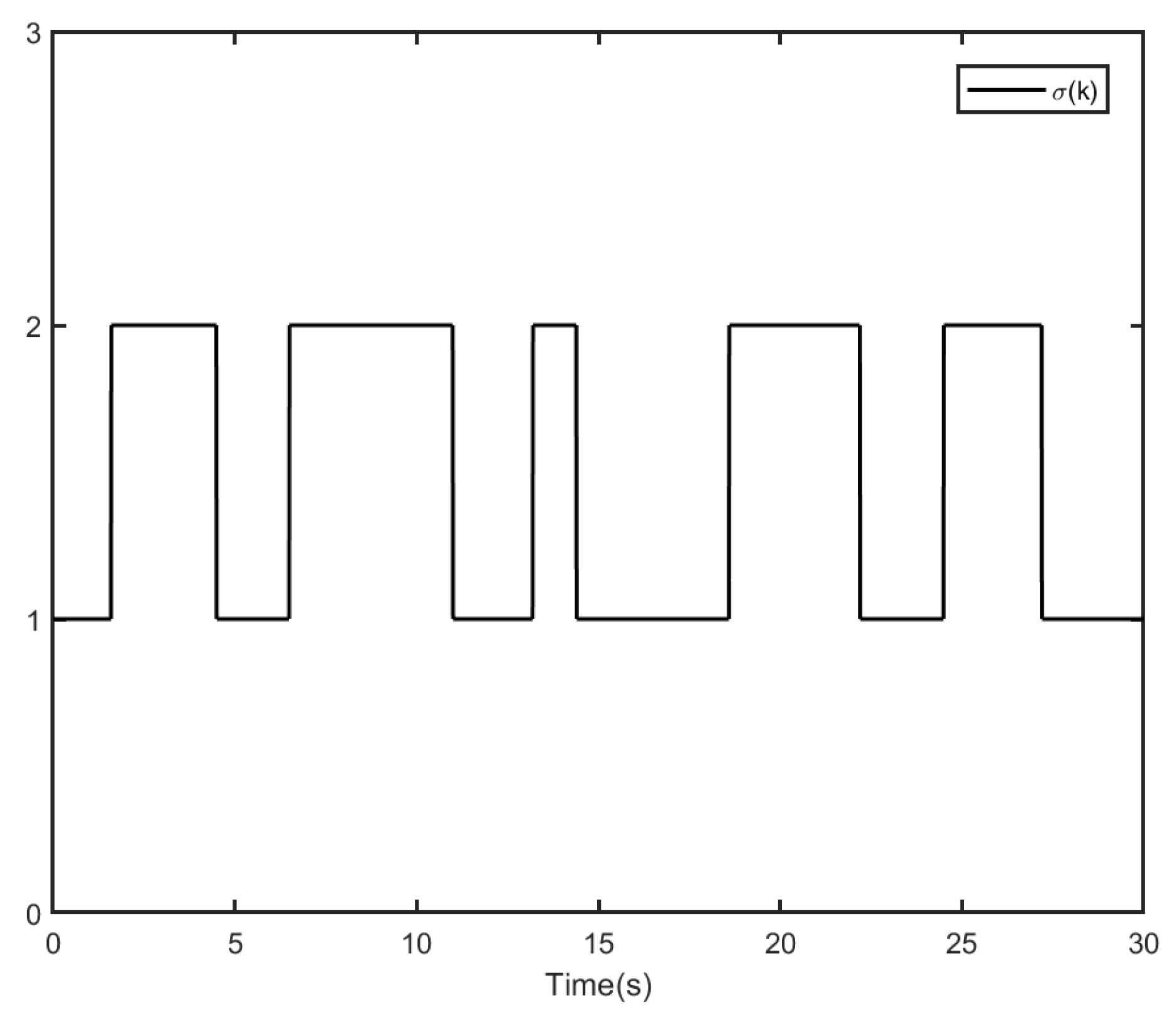
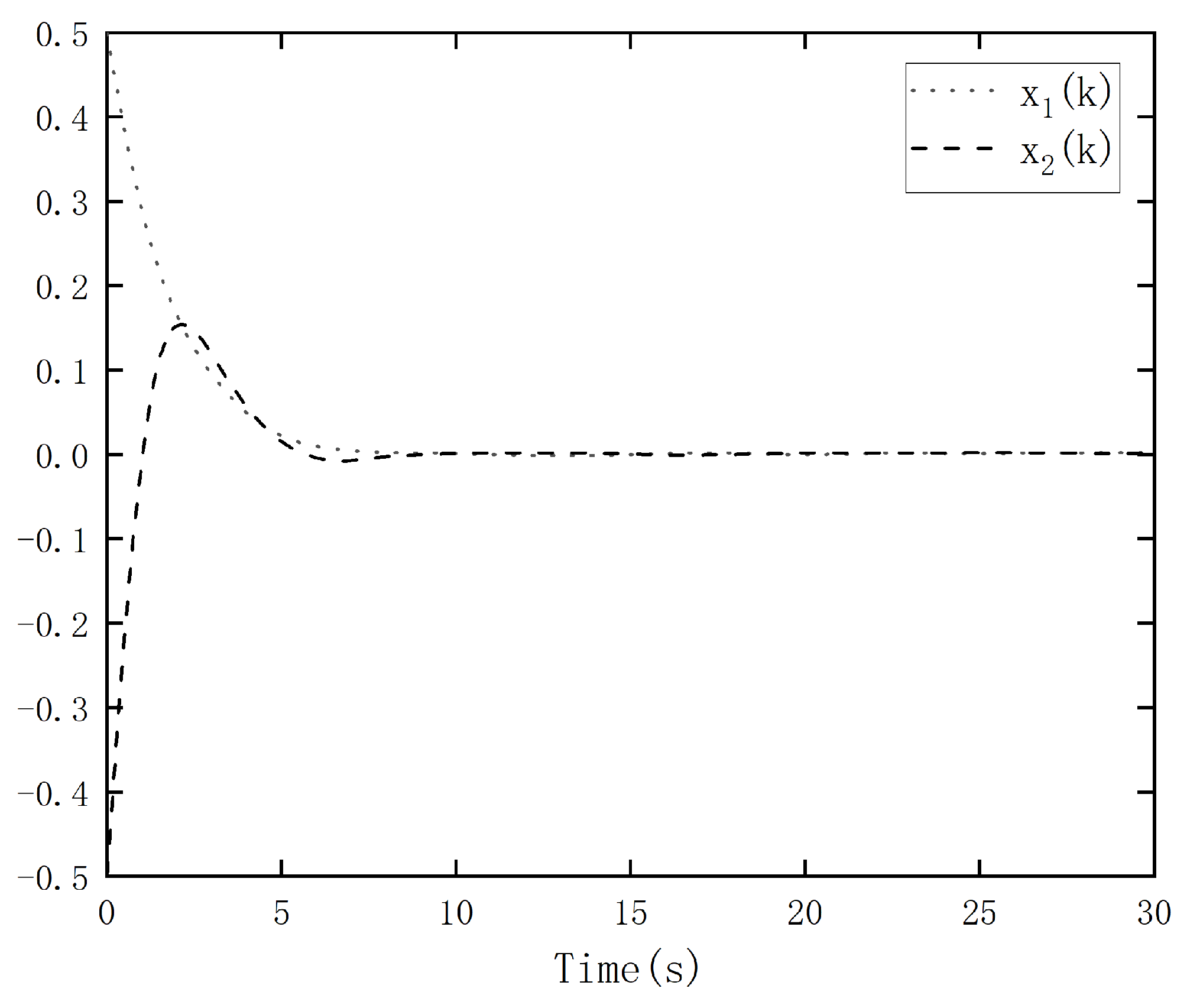
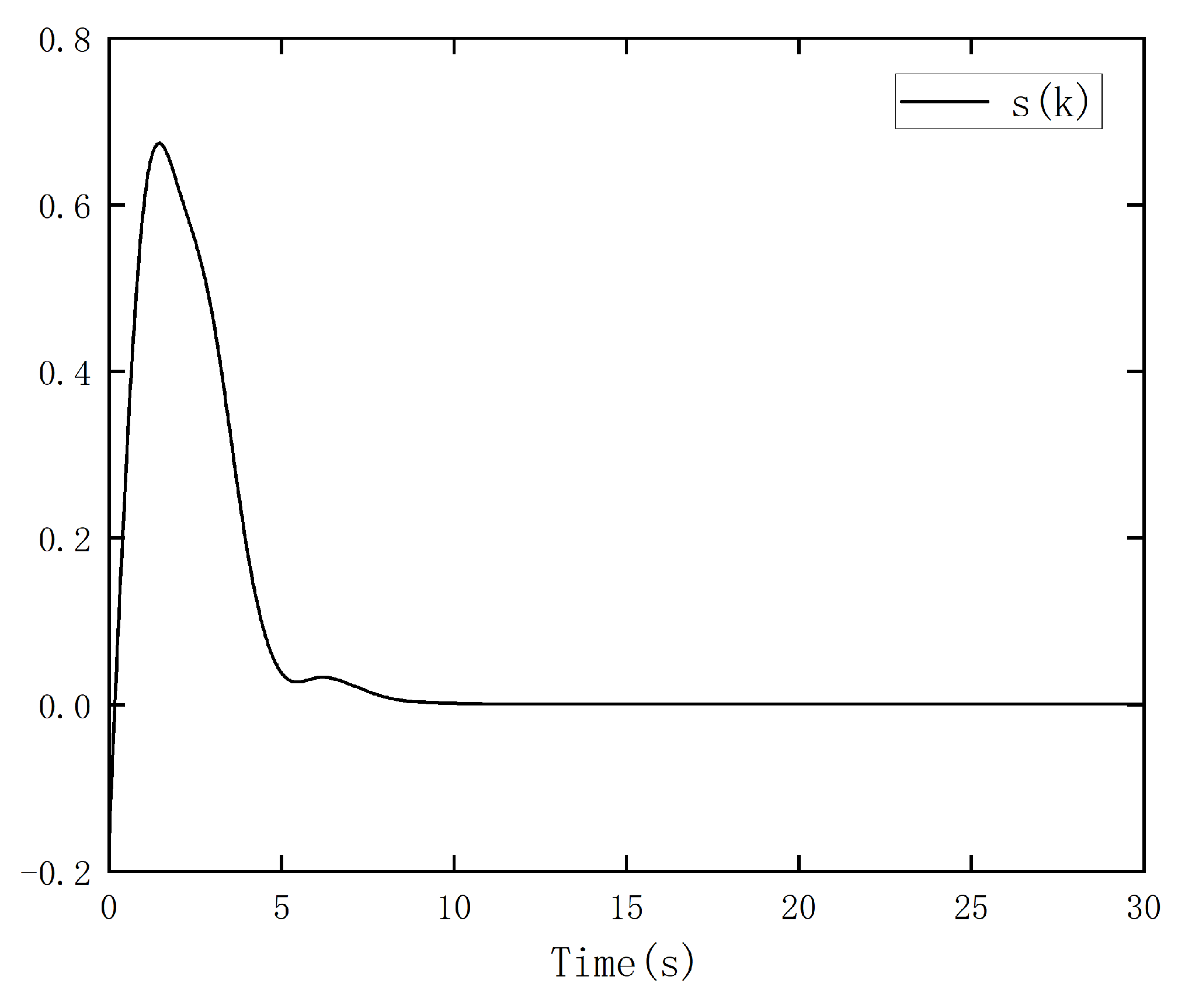
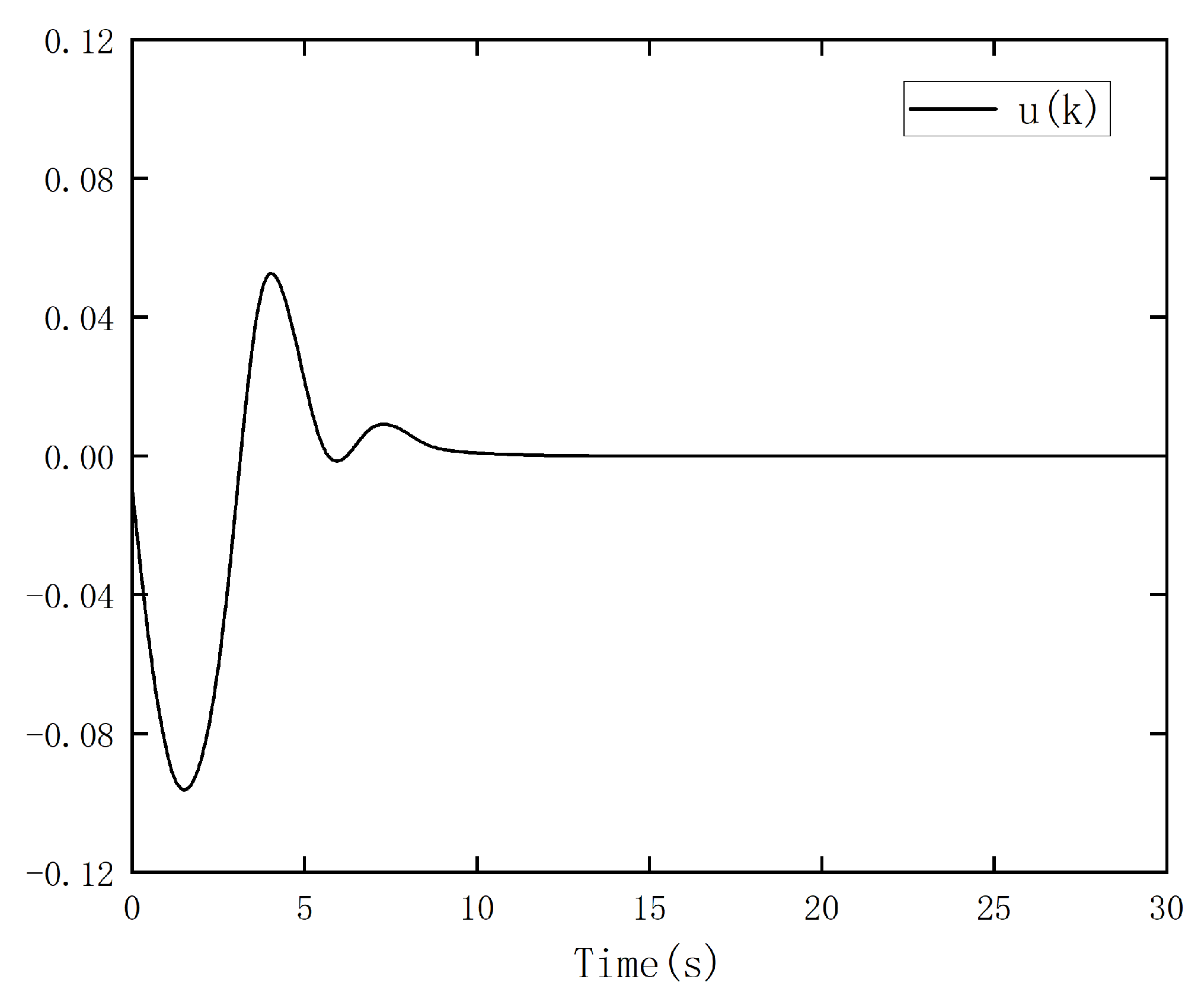
5. Simulation Examples
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- DeCarlo, R.A.; Branicky, M.S.; Pettersson, S.; Lennartson, B. Perspectives and results on the stability and stabilizability of hybrid systems. Proc. IEEE 2000, 88, 1069–1082. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Y.; Wu, F.; Duan, C. Hybrid switched gain-scheduling control for missile autopilot design. J. Guid. Control Dyn. 2016, 39, 2352–2363. [Google Scholar] [CrossRef]
- Gao, H.; Li, Z.; Yu, X.; Qiu, J. Hierarchical multiobjective heuristic for PCB assembly optimization in a beam-head surface mounter. IEEE Trans. Cybern. 2021, 52, 6911–6924. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Lin, W.; Yu, X.; Rodríguez-Andina, J.J.; Gao, H. Approximation-free robust synchronization control for dual-linear-motors-driven systems with uncertainties and disturbances. IEEE Trans. Ind. Electron. 2022, 69, 10500–10509. [Google Scholar] [CrossRef]
- Wan, X.; Li, Y. Adaptive fuzzy backstepping control for itô-type nonlinear switched systems subject to unknown hysteresis input. Mathematics 2024, 12, 1070. [Google Scholar] [CrossRef]
- Pan, Y.; Wu, Y.; Lam, H.K. Security-based fuzzy control for nonlinear networked control systems with DoS attacks via a resilient event-triggered scheme. IEEE Trans. Fuzzy Syst. 2022, 30, 4359–4368. [Google Scholar] [CrossRef]
- Cai, L.H.; Li, T.F.; Zhu, J. Model-based event-triggered control of switched discrete-time systems. In Proceedings of the 2023 IEEE 13th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Qinhuangdao, China, 11–14 July 2023. [Google Scholar]
- Fei, Z.; Guan, C.; Zhao, X. Event-triggered dynamic output feedback control for switched systems with frequent asynchronism. IEEE Trans. Autom. Control 2020, 65, 3120–3127. [Google Scholar] [CrossRef]
- Zhang, X. Robust integral sliding mode control for uncertain switched systems under arbitrary switching rules. Nonlinear Anal. Hybrid Syst. 2020, 37, 100900. [Google Scholar] [CrossRef]
- Lian, J.; Li, C. Event-triggered sliding mode control of uncertain switched systems via hybrid quantized feedback. IEEE Trans. Autom. Control 2021, 66, 2809–2816. [Google Scholar] [CrossRef]
- Shi, P.; Wang, H.; Lim, C.C. Network-based event-triggered control for singular systems with quantizations. IEEE Trans. Ind. Electron. 2016, 63, 1230–1238. [Google Scholar] [CrossRef]
- Li, T.; Tao, L.; Xu, B. Linear parameter varying observer-based adaptive dynamic surface sliding mode control for PMSM. Mathematics 2024, 12, 1219. [Google Scholar] [CrossRef]
- Vicente, B.; Antonio, C.; Ricardo, F.E.; Manuel, A.; Gerardo, V.G.; Eduardo, M.S.; Jarniel, G. Fractional-order sliding mode observer for actuator fault estimation in a quadrotor UAV. Mathematics 2024, 12, 1247. [Google Scholar] [CrossRef]
- Caballero-Barragán, H.; Osuna-Ibarra, L.P.; Loukianov, A.G.; Plestan, F. Sliding mode predictive control of linear uncertain systems with delays. Automatica 2018, 60, 409–415. [Google Scholar] [CrossRef]
- Liu, J.; Wu, L.; Wu, C.; Luo, W.; Franquelo, L.G. Event-triggering dissipative control of switched stochastic systems via sliding mode. Automatica 2019, 103, 261–273. [Google Scholar] [CrossRef]
- Han, C.; Zhang, G.; Wu, L.; Zeng, Q. Sliding mode control of T-S fuzzy descriptor systems with time-delay. J. Frankl. Inst. 2012, 349, 1430–1444. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, F.; Karimi, H.R.; Wang, F. Observer-based sliding mode control for T-S fuzzy descriptor systems with time delay. IEEE Trans. Fuzzy Syst. 2019, 27, 2009–2023. [Google Scholar] [CrossRef]
- Cao, Z.; Niu, Y. Finite-time stochastic boundedness of Markovian jump systems: A sliding-mode-based hybrid design method. Nonlinear Anal. Hybrid Syst. 2020, 36, 100862. [Google Scholar] [CrossRef]
- Li, F.; Du, C.; Yang, C.; Wu, L. Finite-time asynchronous sliding mode control for Markovian jump systems. Automatica 2019, 109, 108503. [Google Scholar] [CrossRef]
- Wu, L.; Gao, Y.; Liu, J.; Li, H. Event-triggered sliding mode control of stochastic systems via output feedback. Automatica 2017, 82, 79–92. [Google Scholar] [CrossRef]
- Zhao, H.; Niu, Y. Finite-time sliding mode control of switched systems with one-sided lipschitz nonlinearity. J. Frankl. Inst. 2020, 357, 11171–11188. [Google Scholar] [CrossRef]
- Fei, J.; Wang, Z.; Pan, Q. Self-constructing fuzzy neural fractional-order sliding mode control of active power filter. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 10600–10611. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Jiang, B.; Karimi, H.R.; Gao, C. An event-triggered mechanism to observer-based sliding mode control of fractional-order uncertain switched systems. ISA Trans. 2023, 135, 115–129. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Zhang, H.; Hu, J.; Xu, L. Event-based sliding mode control for Markovian jump systems with time-varying delays: An observer method. Int. J. Control. Autom. Syst. 2023, 21, 1098–1107. [Google Scholar] [CrossRef]
- Huynh, V.V.; Tran, P.T.; Dong, C.S.T.; Hoang, B.D.; Kaynak, O. Sliding surface design for sliding mode load frequency control of multiarea multisource power system. IEEE Trans. Ind. Inf. 2024, 20, 7797–7809. [Google Scholar] [CrossRef]
- Wei, X.Y.; Wang, F.Y.; Liu, Z.X.; Chen, Z.Q. Fixed-time switching sliding mode control for second-order nonlinear systems. In Proceedings of the 2022 IEEE 11th Data Driven Control and Learning Systems Conference (DDCLS), Chengdu, China, 3–5 August 2022. [Google Scholar]
- Xiong, S.P.; Zhang, X.Y.; Li, Y.N. Output feedback control for switched systems with unmatched uncertainties based on the common robust integral sliding mode. IEEE Access 2023, 11, 119057–119066. [Google Scholar] [CrossRef]
- Bartoszewicz, A. Discrete-time quasi-sliding-mode control strategies. IEEE Trans. Ind. Electron. 1998, 45, 633–637. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, Y.; Zhang, J. Sliding Mode Control of a Class of Hybrid-Switched Systems with Disturbances. Mathematics 2024, 12, 1914. https://doi.org/10.3390/math12121914
Li J, Wang Y, Zhang J. Sliding Mode Control of a Class of Hybrid-Switched Systems with Disturbances. Mathematics. 2024; 12(12):1914. https://doi.org/10.3390/math12121914
Chicago/Turabian StyleLi, Jiaojiao, Yingying Wang, and Jianyu Zhang. 2024. "Sliding Mode Control of a Class of Hybrid-Switched Systems with Disturbances" Mathematics 12, no. 12: 1914. https://doi.org/10.3390/math12121914
APA StyleLi, J., Wang, Y., & Zhang, J. (2024). Sliding Mode Control of a Class of Hybrid-Switched Systems with Disturbances. Mathematics, 12(12), 1914. https://doi.org/10.3390/math12121914