
A New Method of Identifying the Aerodynamic Dipole Sound Source in the Near Wall Flow

Abstract
1. Introduction
2. Establishment of Aerodynamic Sound Dipole Source Identification Method
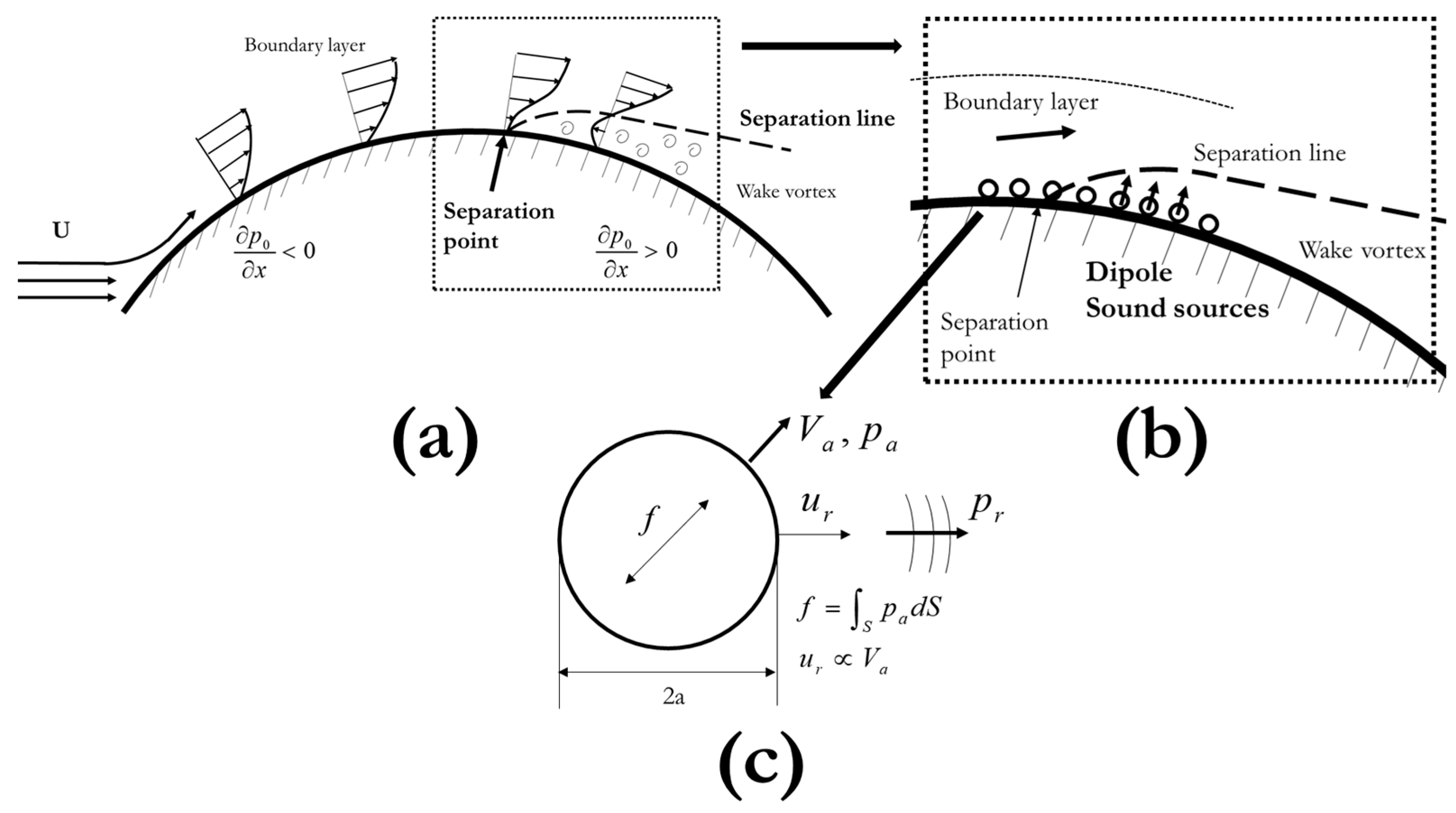
2.1. Basic Idea
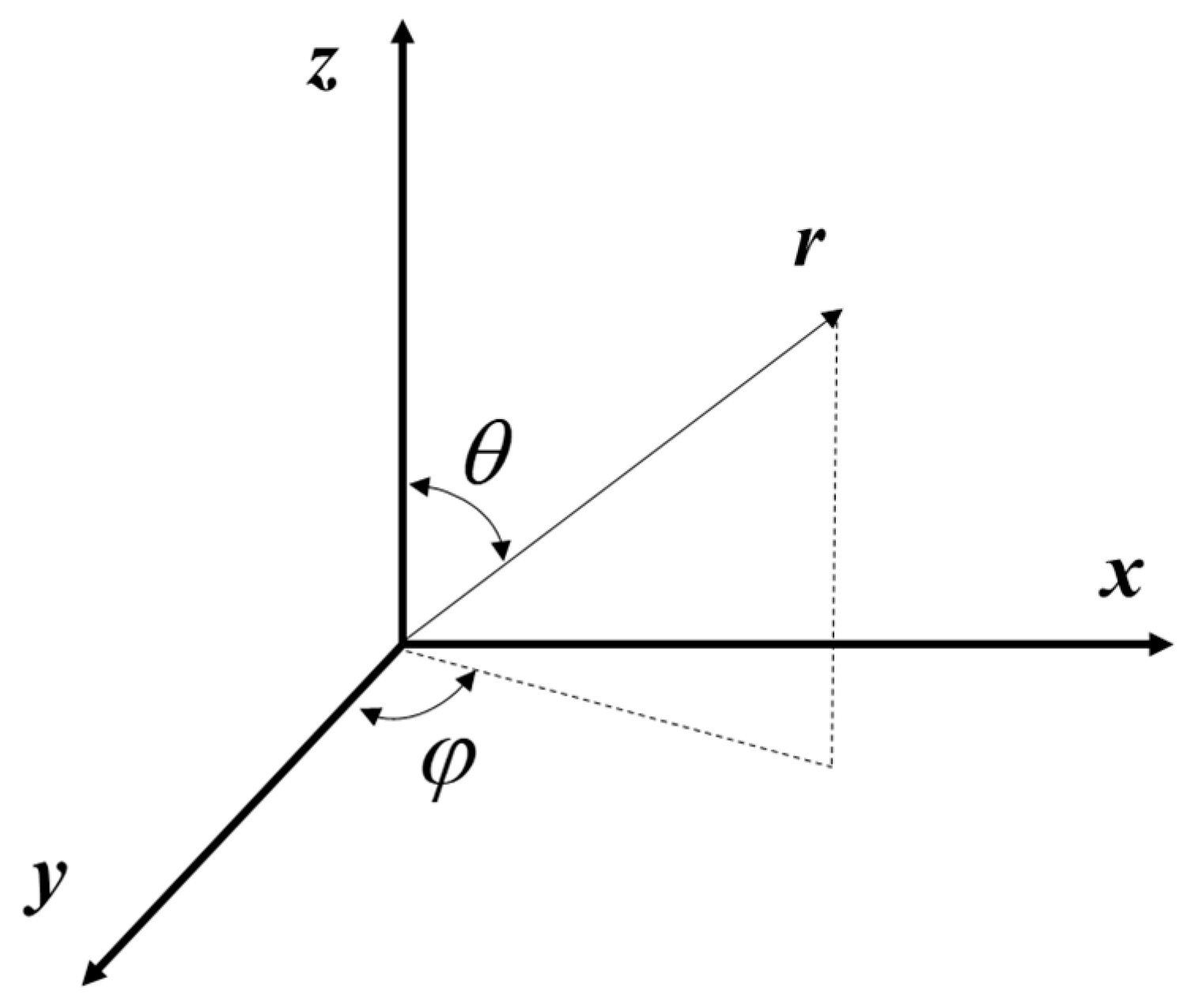
2.2. Formula Derivation
3. Discussion on the Effectiveness of Sound Source Simulation Method Based on Cylindrical Flow
3.1. Verification of the Numerical Simulation Methods
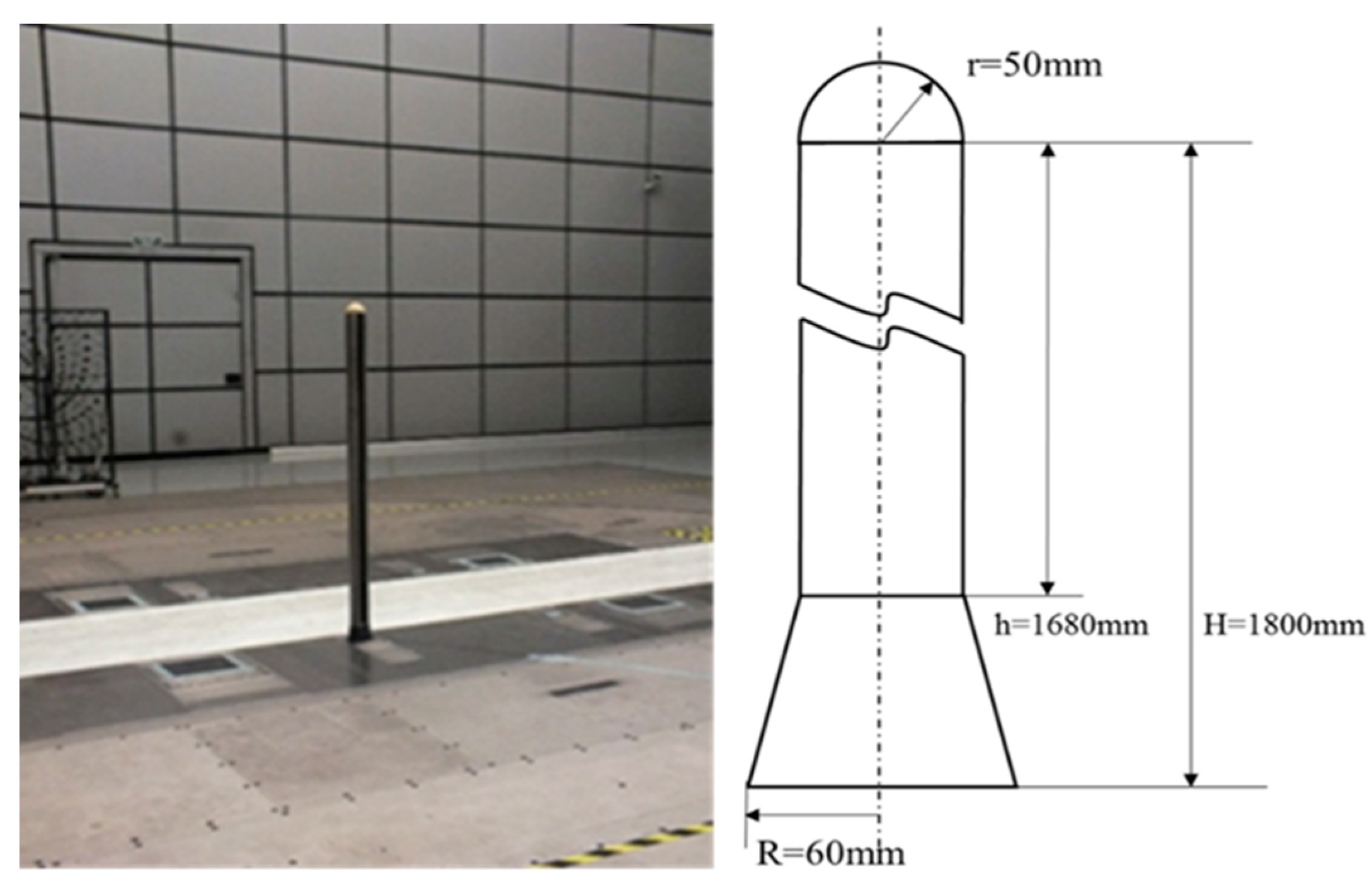
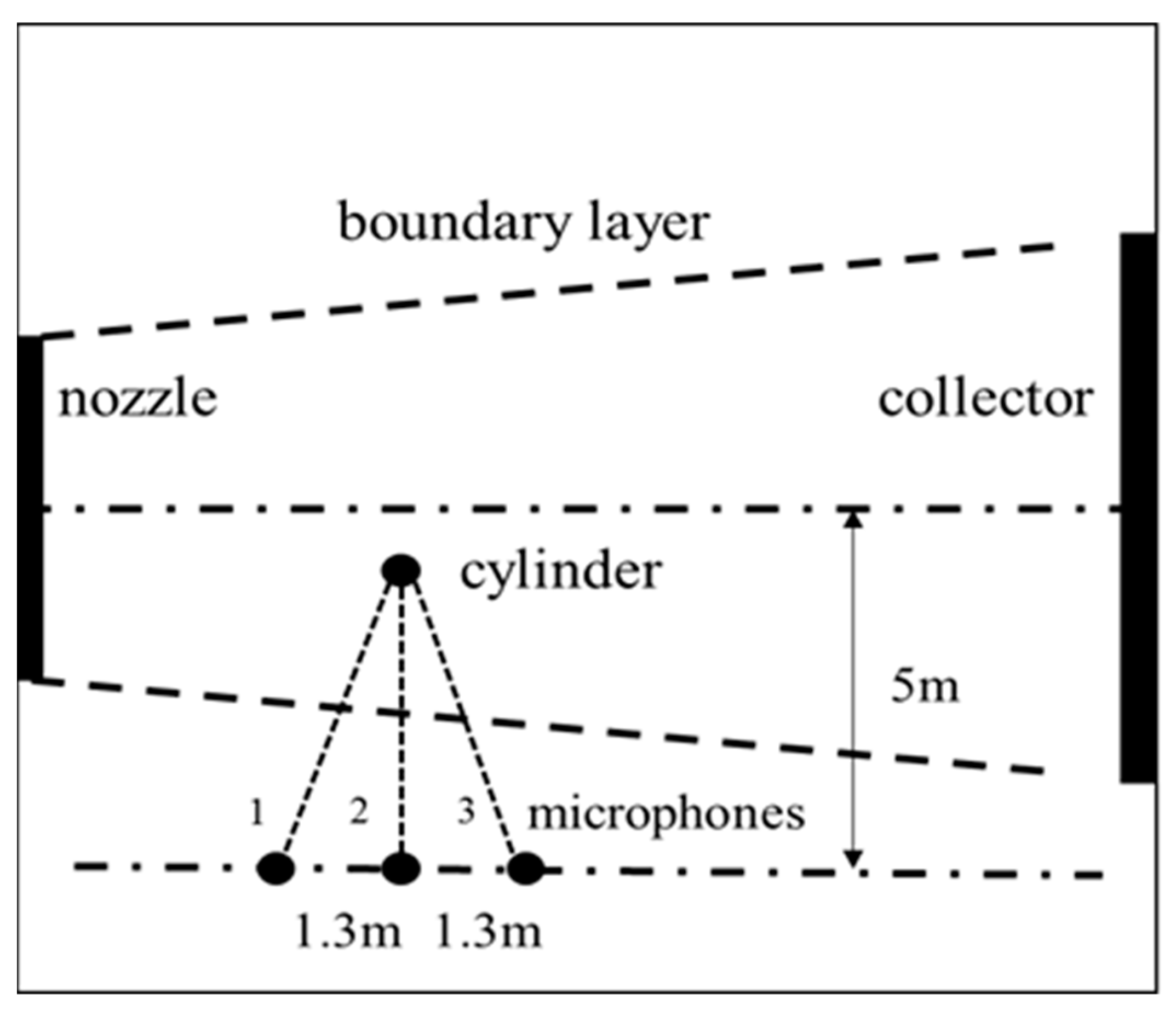
3.1.1. Experiments in the Wind tunnel
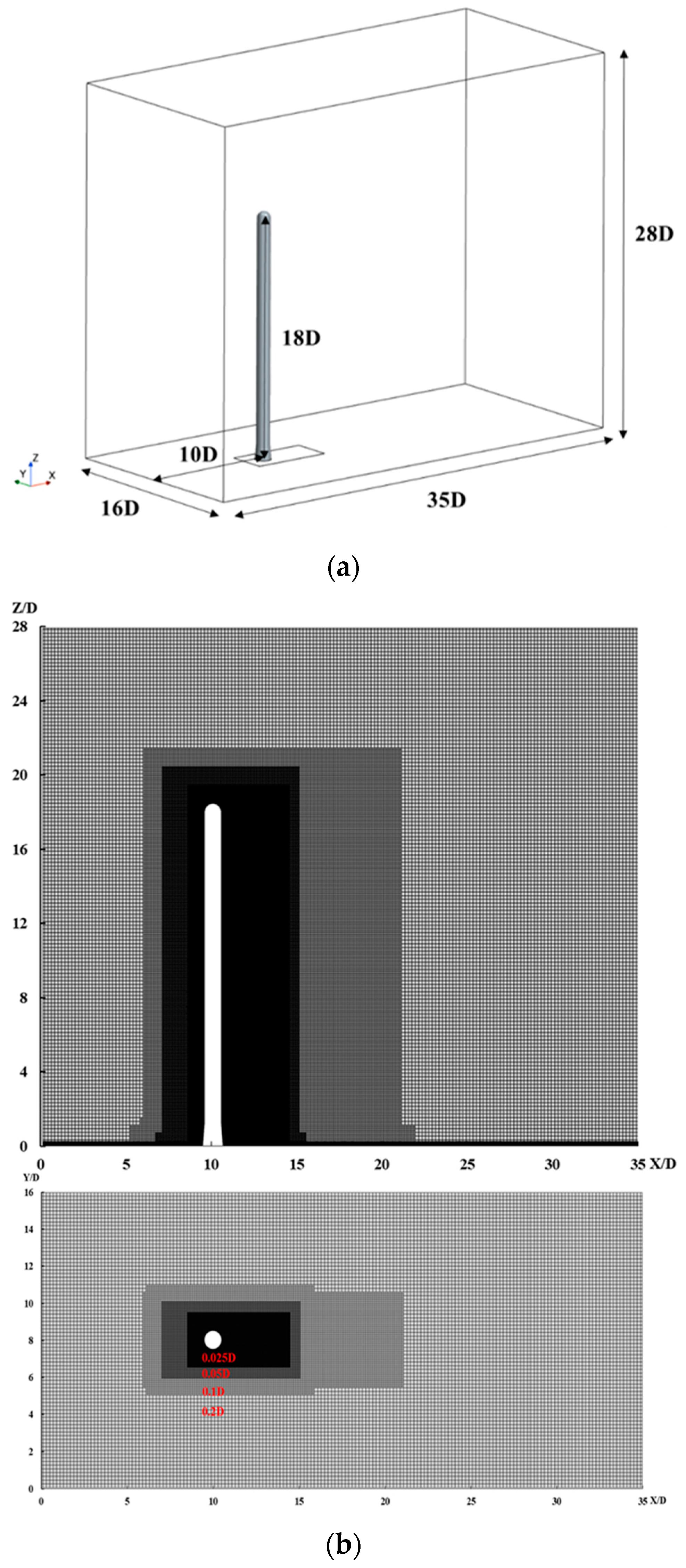
3.1.2. Numerical Simulation Model
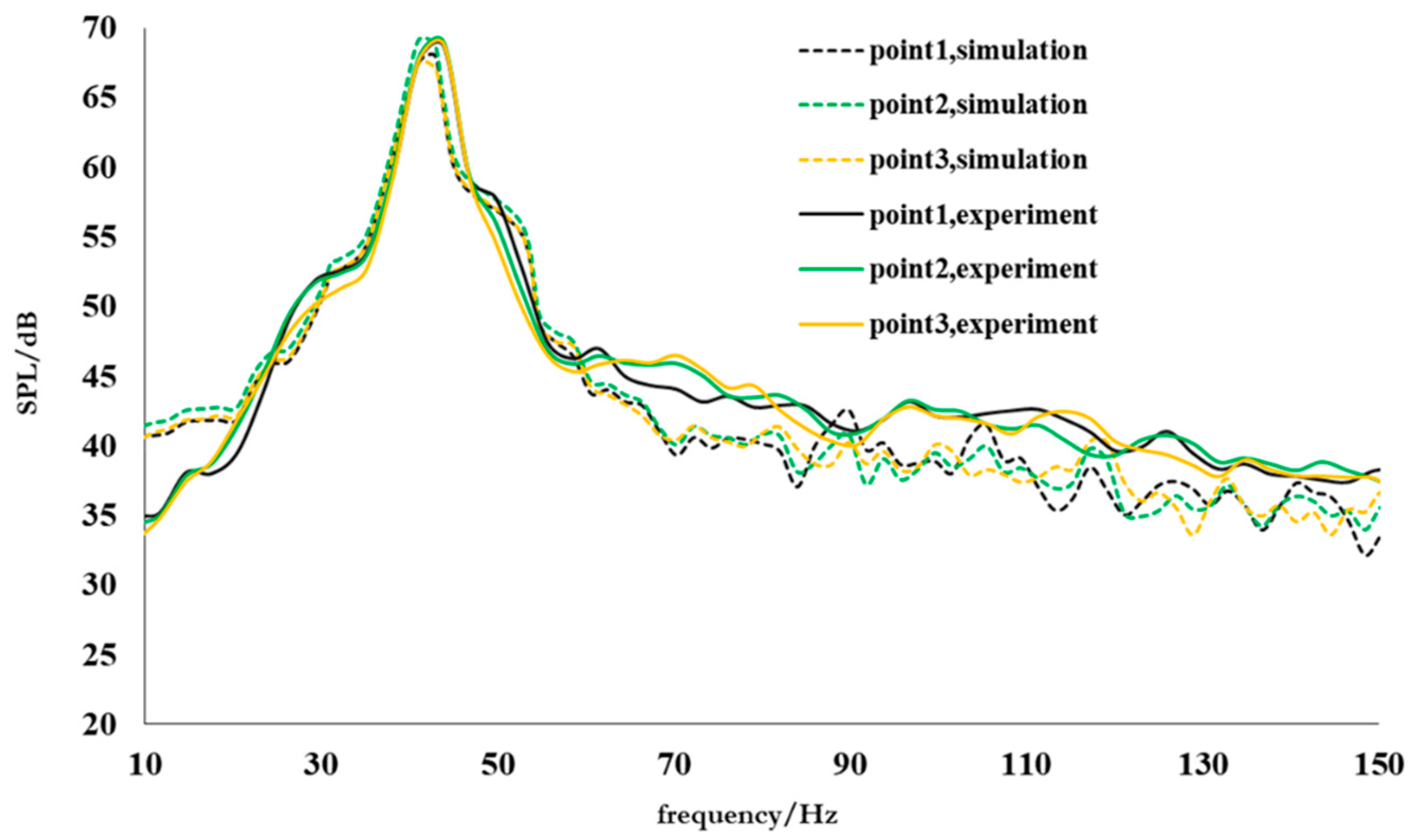
3.1.3. Comparison of Simulation and Experimental Results
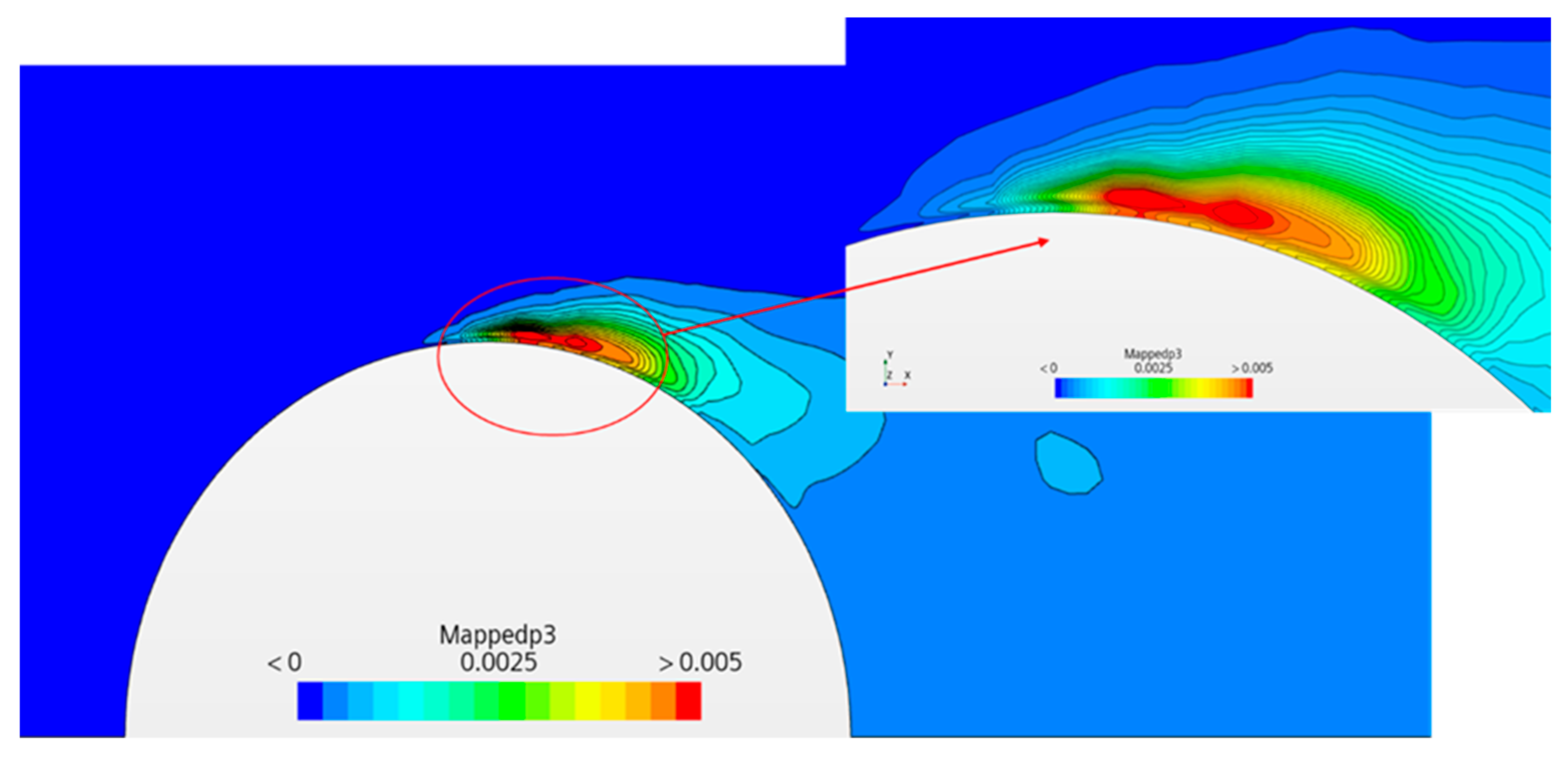
3.2. Sound Dipole Source of the Flow around a Cylinder
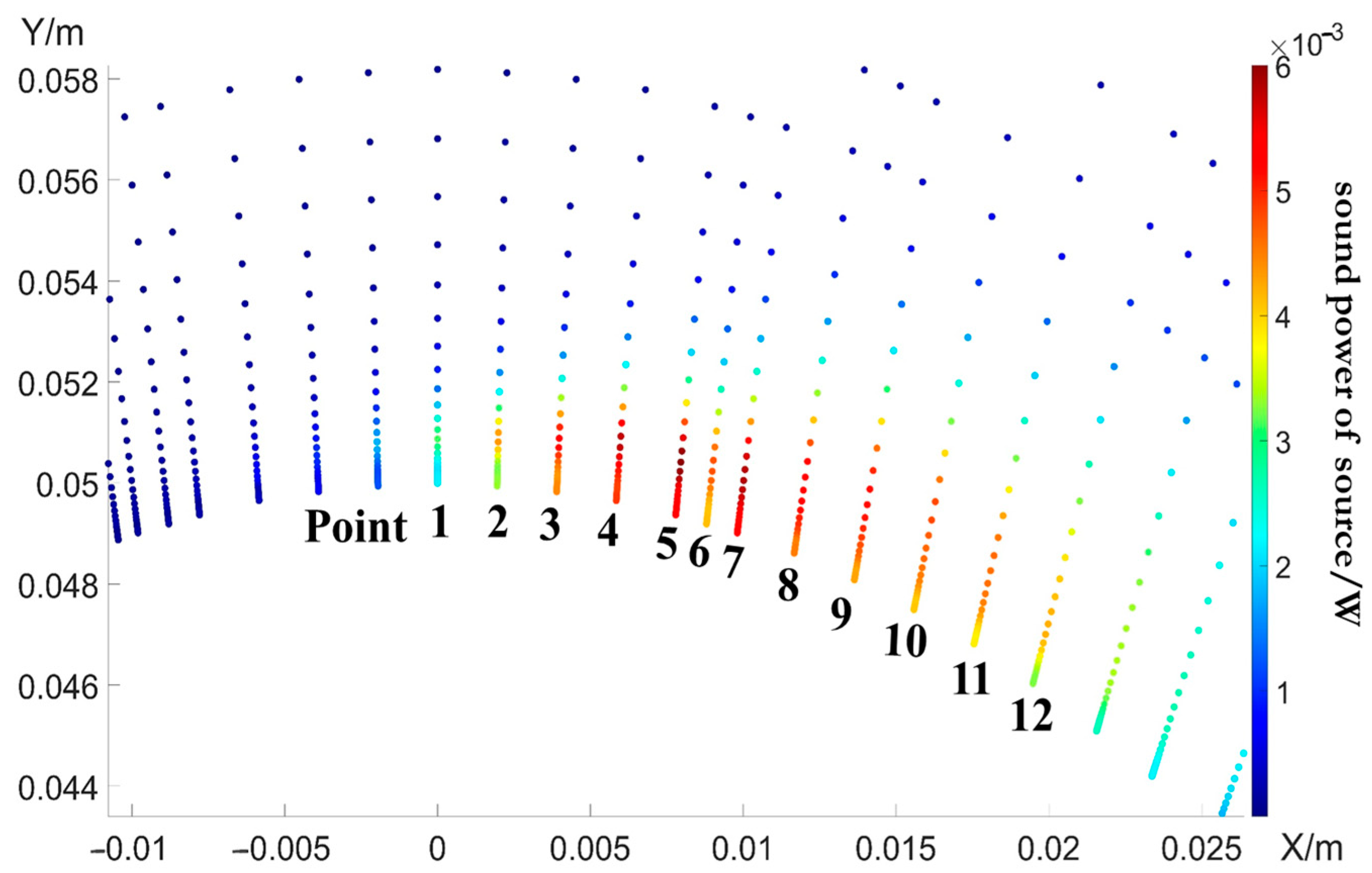
3.3. Verification of the Distribution of Sound Dipole Sources
4. Discussion
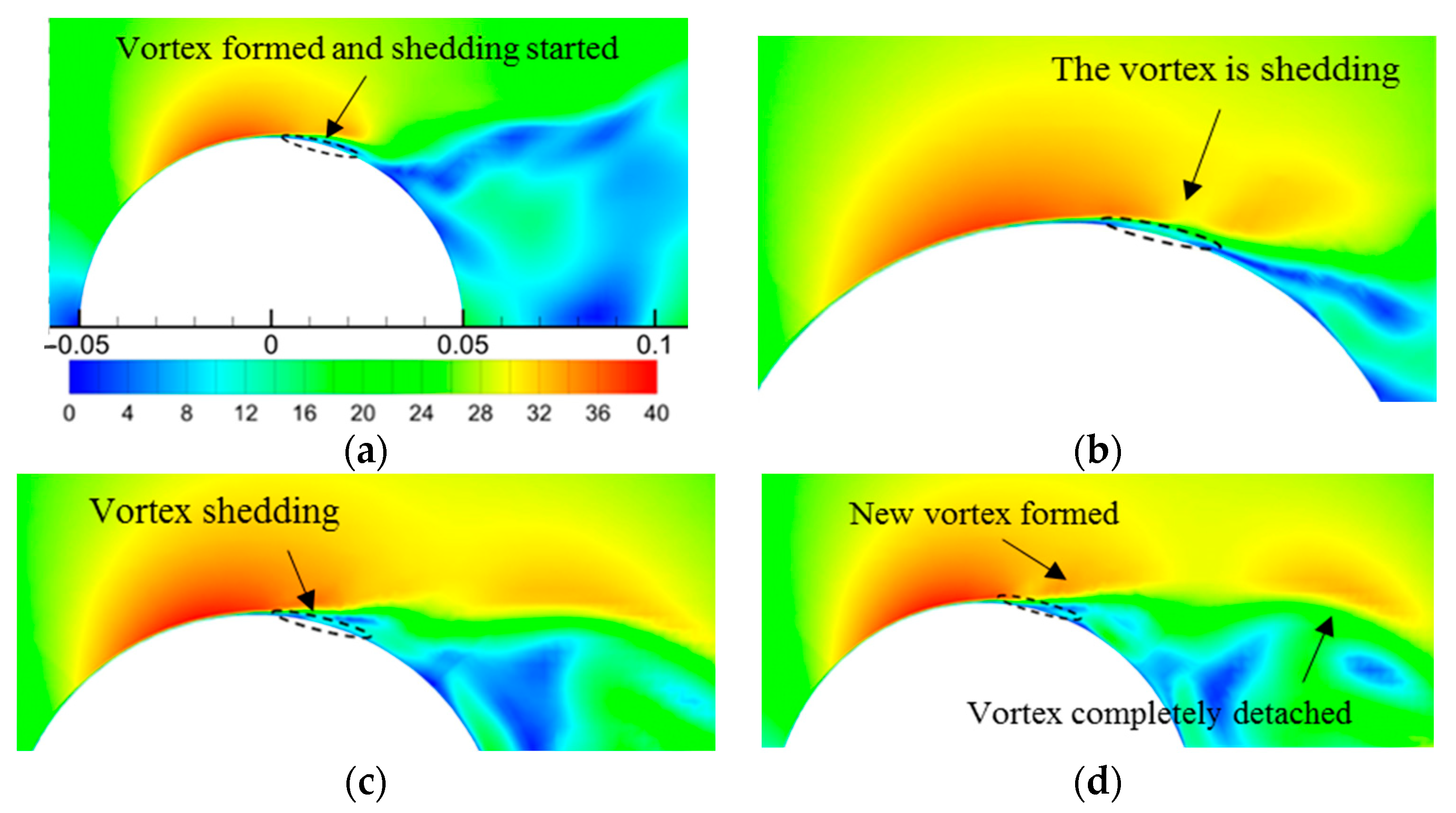
4.1. The Relationship between the Sound Source and the Vortex Shedding
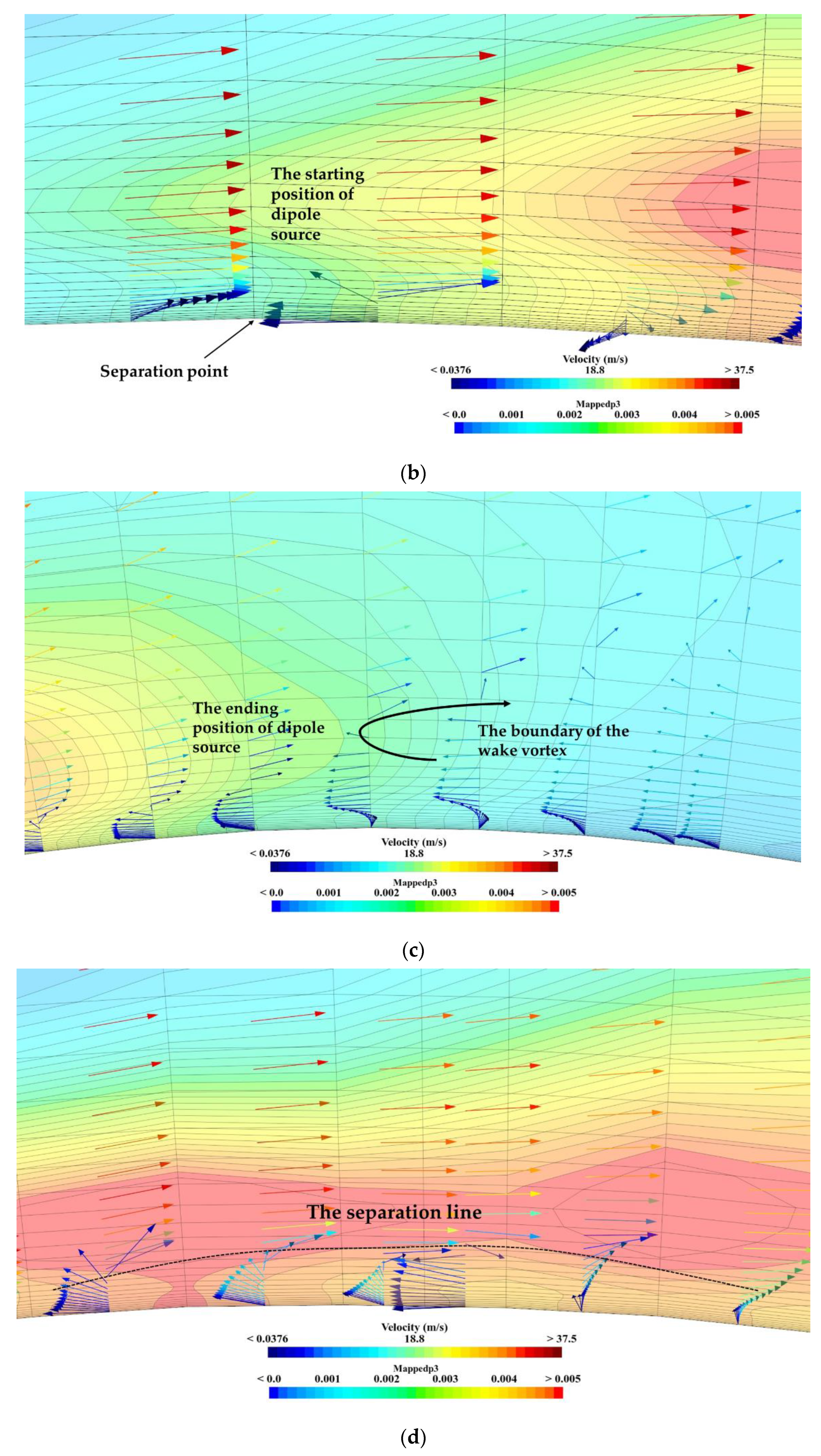
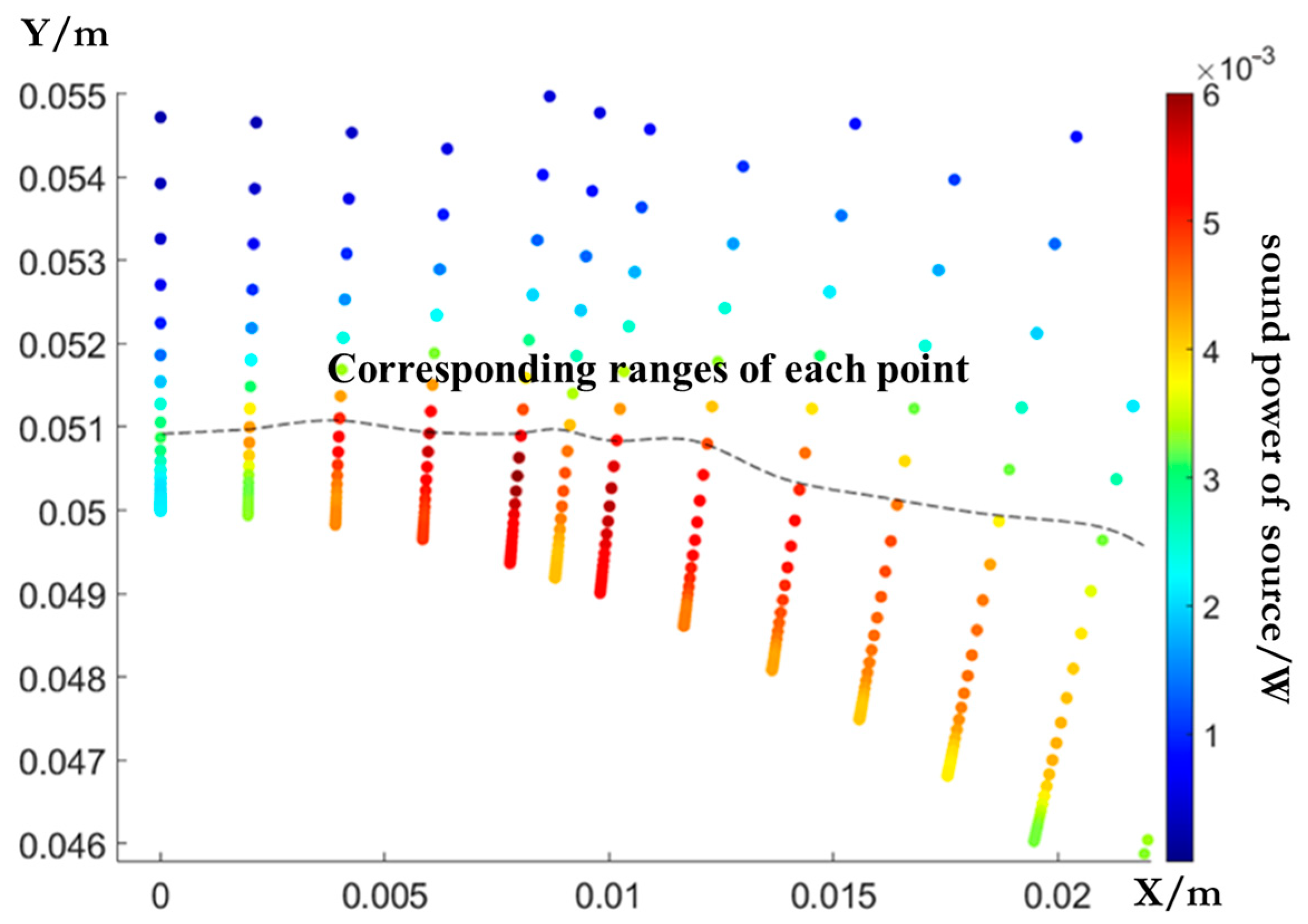
4.2. The Relationship between the Sound Source Area and the Separation Area
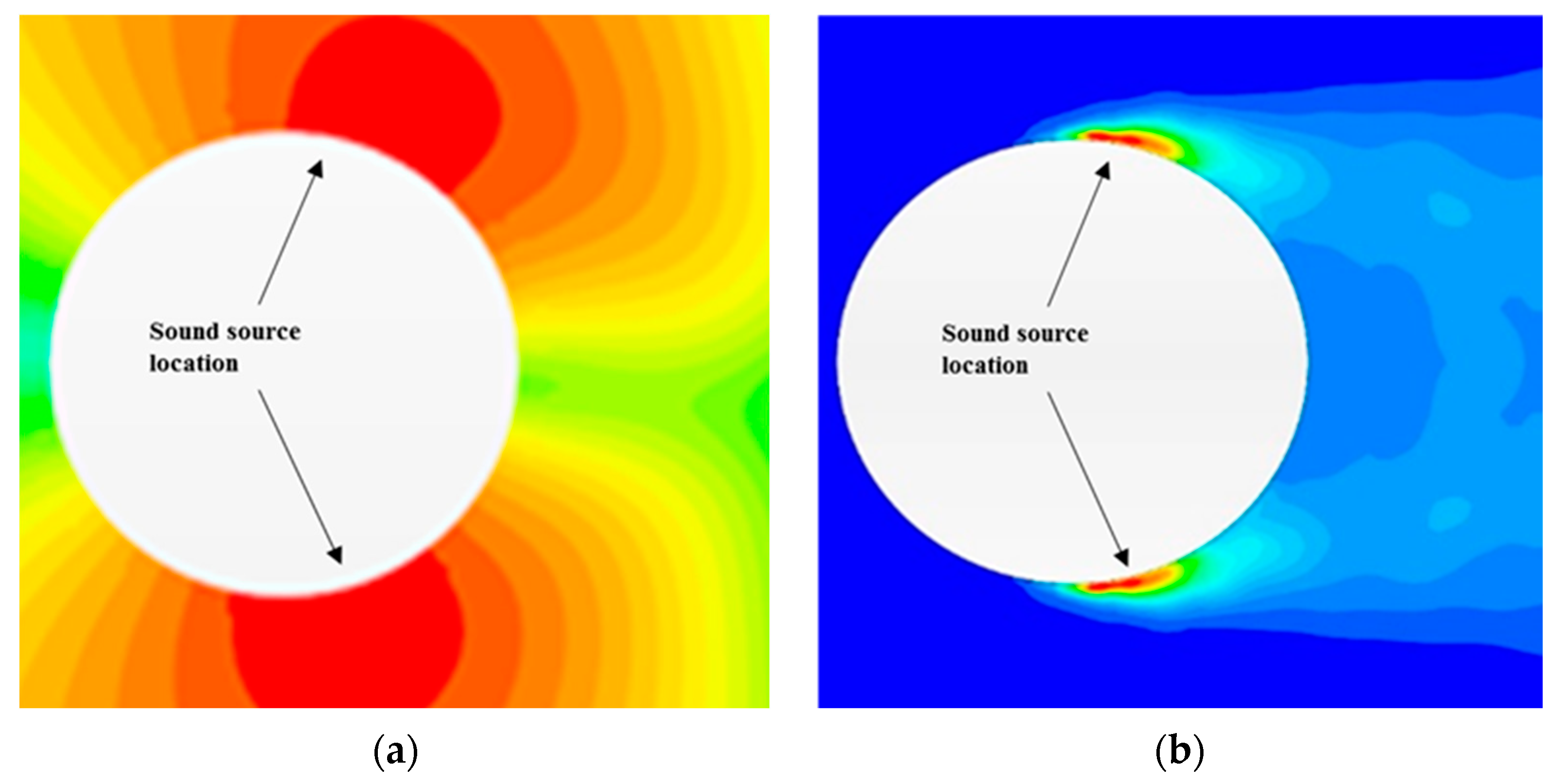
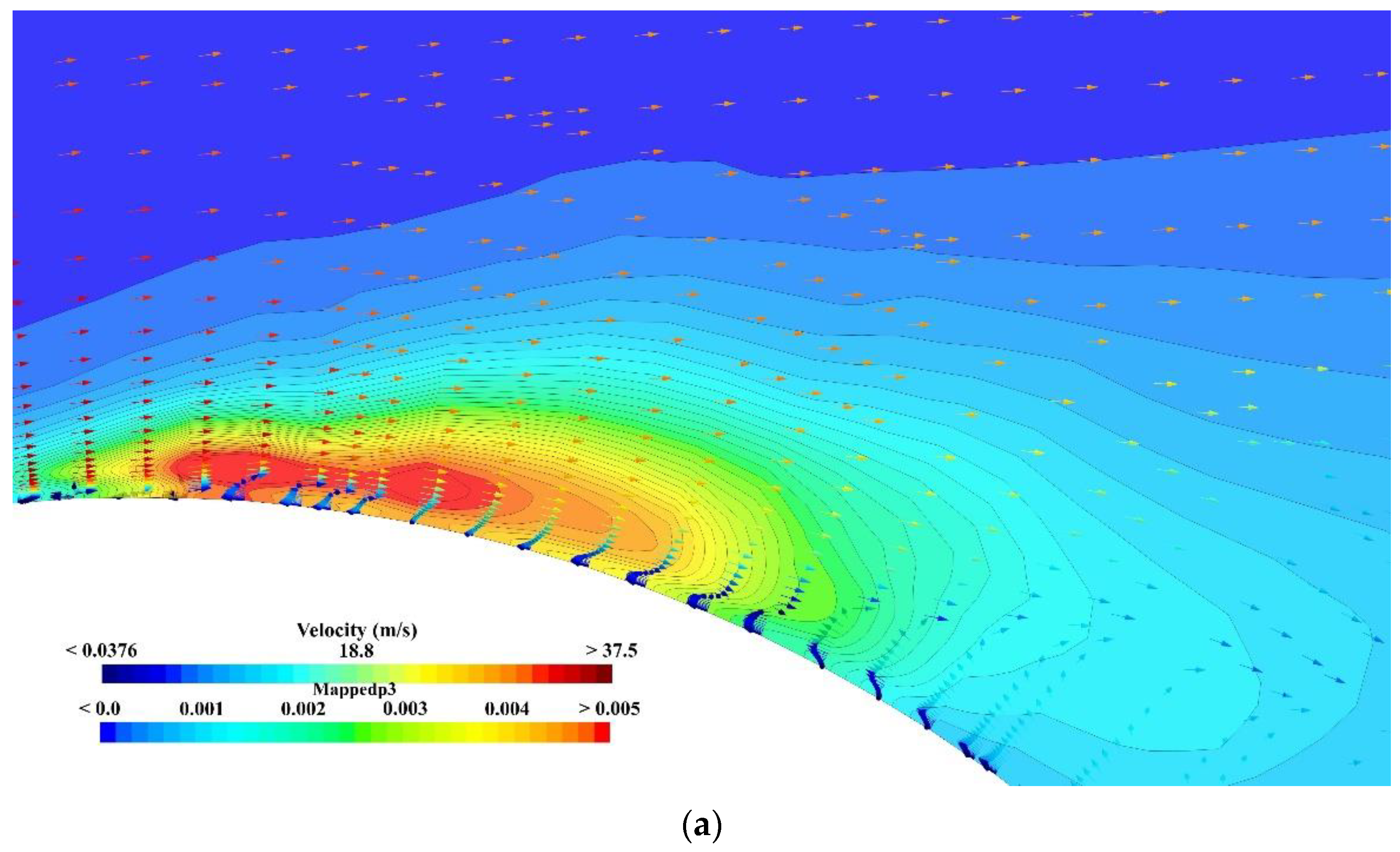
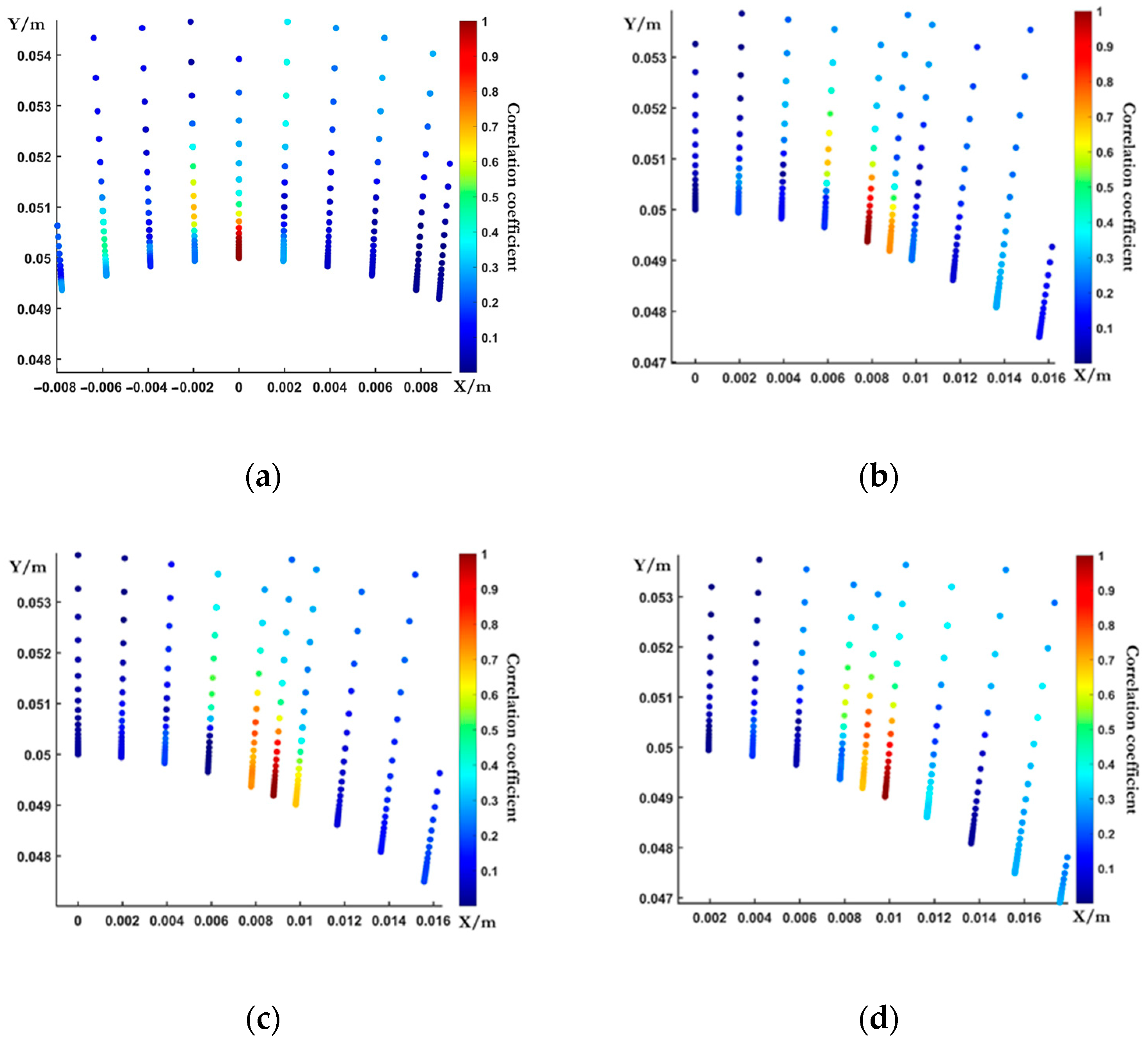
4.3. Correlation between the Sound Source and the Flow Flied
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Watkins, S. Aerodynamic noise and its refinement in vehicles. In Vehicle Noise and Vibration Refinement; Woodhead Publishing Limited: Southton, UK, 2010; Volume 48, pp. 219–234. [Google Scholar]
- Khalighi, Y. Computational Aeroacoustics of Complex Flows at Low Mach Number; Stanford University: Stanford, CA, USA, 2010. [Google Scholar]
- Hucho, W.H. The Aerodynamic Drag of Cars. In Aerodynamic Drag Mechanisms of Bluff Bodies and Road Vehicles; Plenum: New York, NY, USA, 1978; pp. 1–44. [Google Scholar]
- Watanabe, M.; Harita, M.; Hayashi, E. The Effect of Body Shape on Wind Noise. SAE Tech. Pap. 1978, 780266. [Google Scholar] [CrossRef]
- Lighthill, M.J. On sound generated aerodynamically I, general theory. Proc. R. Soc. Lond. Ser. A 1952, 211, 564–587. [Google Scholar]
- Curle, N. The influence of solid boundaries upon aerodynamic sound. Proc. R. Soc. Lond. Ser. A 1955, 231, 505–514. [Google Scholar]
- Ffowcs Williams, J.E.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. A 1969, 264, 321–342. [Google Scholar]
- Brentner, K.S.; Farassat, F. Modeling aerodynamically generated sound of helicopter rotors. Prog. Aerosp. Sci. 2003, 39, 83–120. [Google Scholar] [CrossRef]
- Zhang, Q. Fundamentals of Aeroacoustics; National Defense Industry Press: Beijing, China, 2012. [Google Scholar]
- Casalino, D. An advanced time approach for sound analogy predictions. J. Sound Vib. 2003, 261, 583–612. [Google Scholar] [CrossRef]
- Brentner, K.S.; Farassat, F. Analytical Comparison of the Sound Analogy and Kirchoff Formulation for Moving Surfaces. AIAA J. 1998, 36, 1379–1386. [Google Scholar] [CrossRef]
- Ewert, R.; Schröder, W. Sound perturbation equations based on flow decomlocation via source filtering. J. Comput. Phys. 2003, 188, 365–398. [Google Scholar] [CrossRef]
- Faßmann, B.W.; Rautmann, C.; Ewert, R.; Delfs, J.W. Prediction of porous trailing edge noise reduction via sound perturbation equations and volume averaging. In Proceedings of the 21th AIAA/CEAS Aeroacoustics Conference, Dallas, TX, USA, 22–26 June 2015; pp. 1–18. [Google Scholar]
- Phillips, O.M. On the generation of sound by supersonic turbulent shear layers. J. Fluid Mech. 2006, 9, 1–28. [Google Scholar] [CrossRef]
- Lilley, G.M. Appendix: Generation of Sound in a Mixing Region; Fourth Monthly Progress Report on Contact, F-33615-71-C-1663; U.S. Air Force Aeropropulsion Lab: Wright–Patterson AFB, OH, USA, 1972. [Google Scholar]
- Howe, M.S. Theory of Vortex Sound; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Golstein, M.E. Turbulence generated by interaction of entropy with non-uniform mean flow. J. Fluid Mech. 1979, 93, 209–224. [Google Scholar] [CrossRef]
- Golstein, M.E. The effect of finite turbulence spatial scale on application of turbulence by a contracting stream. J. Fluid Mech. 1980, 98, 473–508. [Google Scholar] [CrossRef]
- Golstein, M.E. The coupling between flow instability and incident disturbance at a loading edge. J. Fluid Mech. 1981, 104, 217–246. [Google Scholar] [CrossRef]
- Golstein, M.E. High frequency sound emission from moving point muhipole sources embeded in arbitrary transversely sheared mean flow. J. Sound Vib. 1982, 80, 499–521. [Google Scholar] [CrossRef]
- Doak, P.E. Fluctuating Total Enthalpy as the Basic Generalized Sound Field. Theor. Comput. Fluid Dyn. 1998, 10, 115–133. [Google Scholar] [CrossRef]
- Ribner, H.S. New Theory of Jet-Noise Generation, Directionality, and Spectra. J. Soundal Soc. Am. 1959, 31, 530–531. [Google Scholar] [CrossRef]
- Powell, A. Theory of Vortex Sound. J. Acoust. Soc. Am. 1964, 36, 177–195. [Google Scholar] [CrossRef]
- Mohring, W. A well posed acoustic analogy based on a moving acoustic medium. Physics 2010. [Google Scholar] [CrossRef]
- Mao, Y.; Tang, H.; Xu, C. Vector Wave Equation of Aeroacoustics and Sound Velocity Formulations for Quadrupole Source. AIAA J. 2016, 54, 1–10. [Google Scholar] [CrossRef]
- Liow, Y.S.K.; Tan, B.T.; Thompson, M.C.; Hourigan, K. Sound generated in laminar flow past a twodimensional rectangular cylinder. J. Sound Vib. 2006, 295, 407–427. [Google Scholar] [CrossRef]
- Etkin, B.; Korbacher, G.K.; Keefe, R.T. Sound radiation from a stationary cylinder in a fluid stream (Aeolian tones). J. Soundal Soc. Am. 1957, 29, 30–36. [Google Scholar]
- Hardin, J.C.; Lamkin, S.L. Aerosound Computation of Cylinder Wake Flow. AIAA J. 1984, 22, 51–57. [Google Scholar] [CrossRef]
- Yokoyama, H.; Iida, A. Direct and hybrid aerosound simulations around a rectangular cylinder. In Numerical Simulations in Engineering and Science; IntechOpen: London, UK, 2017. [Google Scholar]
- Inasawa, A.; Asai, M.; Nakano, T. Sound Generation in the Flow Behind a Rectangular Cylinder of Various Aspect Ratios at Low Mach Numbers. Comput. Fluids 2013, 82, 148–157. [Google Scholar] [CrossRef]
- Menter, F.R. Zonal Two Equation K-W Turbulence Models for Aerodynamic Flows. AIAA J. 1993, 93, 2906. [Google Scholar]
- Felten, F.; Fautrelle, Y.; Terrail, Y.D. Numerical Modelling of Electromagnetically Driven Turbulent Flows Using LES Methods. Appl. Math. Model. 2004, 28, 15–27. [Google Scholar] [CrossRef]
- Nicoud, F.; Ducros, F. Subgrid-Scale Stress Modelling Based on the Square of the Velocity Gradient Tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Total Number of Grids/Million | Minimum Time Step/S | Peak Frequency/Hz | Sound Pressure Level/dB |
|---|---|---|---|---|
| 1 | 32 | 2 × 10−3 | 44.92 | 67.3 |
| 2 | 34 | 2 × 10−3 | 46.88 | 67.6 |
| 3 | 36 | 2 × 10−3 | 46.88 | 66.4 |
| 4 | 40 | 2 × 10−3 | 48.83 | 65.5 |
| 5 | 40 | 1 × 10−3 | 48.83 | 66.8 |
| 6 | 44.6 | 2 × 10−3 | 48.82 | 65.5 |
| Computational Domain Boundaries | Boundary Condition Type |
|---|---|
| Inlet | Velocity inlet, v = 80 km/h |
| The turbulence intensity: 1% | |
| The turbulent viscosity ratio: 10 | |
| Outlet | Pressure outlet, gauge pressure: 0 |
| The turbulence intensity: 1% | |
| The turbulent viscosity ratio: 10 | |
| Cylinder and ground | No-slip wall |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Wang, Y.; Wang, Y. A New Method of Identifying the Aerodynamic Dipole Sound Source in the Near Wall Flow. Mathematics 2023, 11, 2070. https://doi.org/10.3390/math11092070
Zhang H, Wang Y, Wang Y. A New Method of Identifying the Aerodynamic Dipole Sound Source in the Near Wall Flow. Mathematics. 2023; 11(9):2070. https://doi.org/10.3390/math11092070
Chicago/Turabian StyleZhang, Hao, Yigang Wang, and Yupeng Wang. 2023. "A New Method of Identifying the Aerodynamic Dipole Sound Source in the Near Wall Flow" Mathematics 11, no. 9: 2070. https://doi.org/10.3390/math11092070
APA StyleZhang, H., Wang, Y., & Wang, Y. (2023). A New Method of Identifying the Aerodynamic Dipole Sound Source in the Near Wall Flow. Mathematics, 11(9), 2070. https://doi.org/10.3390/math11092070