1. Introduction
In the past decade, the distributed cooperative control of multi-agent systems (MASs) has been widely studied in the fields of science and engineering. Many research results have emerged on issues such as consensus [
1,
2], stabilizability [
3], controllability [
4] and so on [
5,
6]. Observability has received increasing attention as a fundamental and important topic for cooperative control of MASs. It is well known that in the actual industrial process, due to the limitation of measuring equipment, some system states are difficult to measure directly, but the system output can reflect the system state to a certain extent. The observability of MASs is concerned with whether the state at a certain time can be determined by observing the measured output signal within a certain period, that is, whether the state of the system can be observed or estimated from the outside.
Tanner [
7] first considered controllability as well as observability for MASs in 2004 and obtained an algebraic criterion for controllability in the context of leader–follower architectures utilizing eigenvalues and eigenvectors of Laplacian matrices. Sundara et al. [
8] studied the problem of structural observability over finite fields. In 2013, Liu et al. [
9] published a study on the observability of complex systems, which studied the minimum sensor required for observing a complex system. Lozan et al. [
10] analyzed the observability of MASs with chain topology, cyclic topology and their combination. Sabattini [
11] proposed a decentralized interaction rule to ensure the observability of networked systems with time-varying topologies and showed that connection maintenance and random selection of edge rights are key concepts to ensure the observability of the system. Liu et al. [
12] studied the observability of first-order, second-order and higher-order leader-based MASs with fixed topology and obtained observability conditions for the corresponding systems. Tian et al. [
13] investigated the observability of switching MASs consisting of continuous-time subsystems and discrete-time subsystems.
Most of the existing research on the observability of MAS are based on the premise that the agents constituting the system are of a single type, which is far from sufficient to cover the situation as it actually exists. Zelazo et al. [
14] studied the observability of network systems with homogeneous and heterogeneous dynamics and concluded that network systems that are always unobservable under homogeneous conditions can be observable or unobservable under heterogeneous conditions according to the structure of individual agent dynamics. Tian et al. [
15] studied the observability of heterogeneous MASs composed of two types of agents and where different types of agents have different and switching topologies of information interactions. Based on the set of controllable states and the system matrix corresponding to all possible topologies, the corresponding criteria of observability were obtained.
In general, complex actual systems often contain different time scales, and this is also true in actual MAS. That is to say, the actual situation is not in line with all the above research results, which show that the agents constituting a MAS may work on the same time scale. For example, in the field of robotics, the dynamics of a flexible manipulator consist of two main time scales: macroscopic rigid motion and microscopic flexible vibration [
16]. The existence of small parameters in the system models constructed in this case that distinguish between different time scales has led to numerical ill-posed problems when using conventional methods for observability analysis. With the deepening of scientific research, researchers become increasingly eager to explore the inherent scientific nature of complex natural phenomena, and the topic of exploring the impact of time scales has also received some researchers’ attention. Posfai [
17] investigated the problem of controlling multilayer and multi-time-scale networks with one-to-one interlayer coupling. Su [
18] investigated the controllability of first-order two-time-scale MASs. Then, Long [
19,
20,
21] investigated the controllability of second-order two-time-scale MASs in continuous time and discrete time and considered the group controllability problem of first-order MASs in combination with the situation that groups are often divided to perform different tasks in actual MASs. In [
22], Long analyzed the controllability of heterogeneous two-time-scale MASs.
Currently, the observability theory of MASs on a single-time scale is relatively well developed, but the observability problem of MASs on a two-time scale is rarely discussed. Different from classical linear time-invariant systems (LTIs), MASs are affected by many factors, such as the dynamics of each agent, the communication topology between agents, the control law, and the system dimension, which make the study of observability of MASs present new characteristics and theoretical difficulties. Further consideration of the impact of a two-time-scale feature on the observability of MASs is an even more challenging research task; however, there is still a gap in the research on this challenging but important task. The aim of this paper is to study the observability of MAS with a two-time-scale feature, while taking into account the influence of individual heterogeneity of agents based on a leader–follower architecture, which is a powerful supplement to the existing research results on MASs. The main contributions of this paper are summarized as follows. (i) This paper proposes research on the observability of MASs with a two-time scale for the first time, which is challenging because the traditional research methods of observability cannot be directly used here, and it is also pioneering. The heterogeneity of the individuals constituting the MASs is also considered, which brings the study closer to reality. (ii) A model for the study of the observability of MASs with a two-time scale and heterogeneous features is developed, and the steps of model reduction using the boundary layer method of singular perturbation system theory are elaborated to provide ideas for future research on this kind of problem. (iii) Based on the matrix theory, the observability analysis is carried out, and some operable observability criteria are obtained.
The organization of this paper is as follows:
Section 1 reviews some mathematical preparatory knowledge.
Section 2 details the motivation of the research, specifically including model introduction, modeling approach and preliminary model collation. In
Section 3, reduced order modeling is carried out based on the boundary layer method of the singular perturbation system theory, and the slow-time-scale subsystem and fast-time-scale subsystem are obtained.
Section 4 specifies the observability analysis. Numerical simulation results are presented in
Section 5. Conclusions of the paper are presented in
Section 6.
2. Mathematical Preliminaries
Here are some lemmas that will be used for the rest of this paper.
Lemma 1 ([
23])
. For a constant matrix E with compatible dimensions, if all eigenvalues β of satisfy , thencan be obtained when . Lemma 2 ([
23])
. For a constant matrix E with compatible dimensions, if all eigenvalues β of satisfy , thencan be obtained when . Lemma 3 ([
24])
. For real matrices , and satisfying the conditions and , it follows that the linear matrix inequality holds if and only if Note that in the next narrative, denotes the set of real numbers, I denotes a unit matrix with compatible dimensions, and 0 denotes either a zero element, a zero vector or a zero matrix with compatible dimensions. A weighted directed graph is made up of nodes and the edges . For the edge , represents the coupling weight between and . The number of edges pointing away from a node is the outgoing degree of the node , while the number of edges pointing into it is its incoming degree. The neighborhood of a node is the set of all nodes adjacent to it. and denote the adjacency matrix and the Laplacian matrix of the graph , respectively, where and .
3. Motivation
A discrete-time MAS considered in this paper is based on a leader–follower architecture and is considered to have two different time scales, while also considering that the dynamics of the agents that make up the MAS are not unique in type, that is, some are first-order agents and others are second-order agents. To demonstrate more clearly the object under discussion, a legend of such a system model is given through
Figure 1.
As can be seen in
Figure 1, the agents can be divided into four parts, namely, a cluster of first-order follower agents
, a cluster of first-order leader agents
, a cluster of second-order follower agents
and a cluster of second-order leader agents
. The red vertices as well as the green vertices are used to distinguish between the leader role or the follower role assumed by the different agents.
To facilitate the mathematical description, we use and to represent the index of first-order and second-order agents, respectively. The index set of leader agent is , and the remaining set is the index of the follower agent.
The information interactions between the agents are presented in the form of linked edges in
Figure 1 and can also be described mathematically by the following matrix
L.
Due to the consideration of the two-time-scale feature, and taking into account the practical situation, each agent is considered here to operate on two different time scales simultaneously. In this way, for the first-order agent
, there are position information
and
on the slow- and fast-time-scale, and for the second-order agent
, there are not only position and speed information
and
on the slow-time scale, but also position and speed information
and
on the fast-time scale. With the above setting, the model of the MAS discussed in this paper can be described as
where
and
are corresponding input matrices on two different time scales,
is the control inputs.
For the MAS (
5) and (
6), the designed communication protocol is
in conjunction with the consensus protocol, where
and
denote the position state coupling matrix, while
and
are the speed state coupling matrix.
Organizing the Equations (5)–(8) above and noting that
,
,
,
,
,
,
,
,
,
,
,
gives
where
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
.
Then, let
,
and
to obtain
where
,
,
,
,
,
.
For the MAS depicted in
Figure 1, the states of the system are often difficult to measure directly due to the limitations of the measurement equipment in the actual control process, and what can be measured is usually some output signals. The so-called observability of the MAS mentioned in the Introduction means that the state of the whole MAS can be observed through only a few agents as far as possible. This is similar to the reason for leading the whole MAS with a minimum number of leaders. In this paper, it is assumed that leaders can measure the status information of their neighbors and exchange the obtained information with other leaders. According to this, we take the output vector measured by the leaders as the output of the system.
Accordingly, for Equations (10) and (11),
is chosen as the output.
Therefore, the complete dynamic equation for the MAS considered in this paper is
which can be regarded as the classical singularly perturbed system equation, and it should be noted that
.
4. Reduced-Order Modeling
System (
13) is referred to as a singularly perturbed system in view of the existence of the singularly perturbed parameter
that distinguishes different time scales. If the conventional observability theory is used for the observability analysis of the above system, it will lead to the ill-posed problems. In this paper, a reduced-order decomposition of System (
13) is first performed based on the boundary layer correction method [
25,
26,
27,
28] of the singularly perturbed system.
Consider first the slow-time-scale subsystem, at which point the state of the fast-time-scale subsystem is considered to have reached a steady state, and it is reasonable to assume that matrix
is invertible, such that Equation (11) can be written as
Substituting (15) into (10) gives
Let
,
, then we have
The time scale of the slow-time-scale subsystem is denoted by
h and defined by
In addition, the control input signal of the slow-time-scale subsystem remains unchanged during
and can be expressed as
. Accordingly,
can be derived. When the value of
is large enough, according to Lemmas 1 and 2, and let
and
, there is
Denote
and the equation for the reduced order slow-time-scale subsystem can be obtained as
provided that infinitesimal terms are neglected.
The state variable
can be considered to remain invariant when considering the fast-time-scale subsystem.
can be obtained by subtracting Equation (
14) from Equation (11). By defining
,
and combining
, there is
Noting that
and
, it follows that
which is the state equation of the fast-time-scale subsystem.
Because
, there is
By substituting Equation (
15) into (
26),
and
are obtained.
To sum up,
is the reduced-order slow-time-scale subsystem and
is the reduced-order fast-time-scale subsystem, where
and
. Let
,
and
, then
6. Simulation
Simulation results of a MAS consisting of five first-order agents and four second-order agents are used to illustrate the effectiveness of Lemma 4; Theorem 1–5 are valid. In this example, two and one of the first- and second-order agents act as leaders, respectively, while the rest act as followers. See
Figure 2 for details, with
The values of the coefficient matrices
,
,
,
,
and
involved are
It can be seen from
Figure 2 that
,
,
,
. Without losing generality, it is assumed that the state of each agent is one-dimensional, that is,
. Furthermore, take
. From the calculations, it follows that
and
, that is to say, the observability matrix is column full rank. From Lemma 4, this system is observable.
The calculation yields
and
Since the eigenvalues of the matrix are different from each other and the eigenvalues of the matrix are also different from each other, and it can be found that all the row vectors of the matrix are not orthogonal to one eigenvector of the matrix and all the row vectors of the matrix are not orthogonal to the eigenvector of at the same time, according to Theorem 2, it also shows that this system is observable.
Since
and
each column of
has at least one non-zero element, and each column of
also has at least one non-zero element; it follows from Theorem 3 that the system is observable.
Furthermore, the eigenvalues of the matrix Q are
. It can be found that the matrices
,
as well as
Q do not have the same eigenvalues as each other, and according to Theorem 4, it can be concluded that this system is observable. Furthermore, as can be seen from
Figure 2, the cluster of all follower agents has a non-zero out-degree, which also verifies the conclusion of necessity obtained from Theorem 5.
Since the state change of the agents caused by the input
can be regarded as the initial state equivalently, and when discussing the observability, the focus is on whether the state of the agents can be fully reflected by the output of the system; thus, when considering the observability problem, the items related to the input
in System (
13) are ignored, and then
is obtained.
Let
and
, then Equation (
62) can be reorganized as
A corresponding observer system (
64) is created for Equation (
63), and the dynamics of each agent is simulated with a randomly selected initial state.
If the error is defined as
, then
Defining the following Lyapunov function
and making a difference to
gives
According to the Lyapunov Stability Theory, if
, then Error System (
65) is asymptotically stable, and the error converges to zero. By the property that the negativity of a quadratic function can be determined by the negativity of its representation matrix, it follows that
is equivalent to
Let
, then the observer gain is
. Let
,
and
; Inequality (
68) can be written as
Then, according to Lemma 3, the following inequality
can be obtained, that is,
The corresponding observer gain
of Inequality (
71) can be solved through the LMI toolbox of MATLAB.
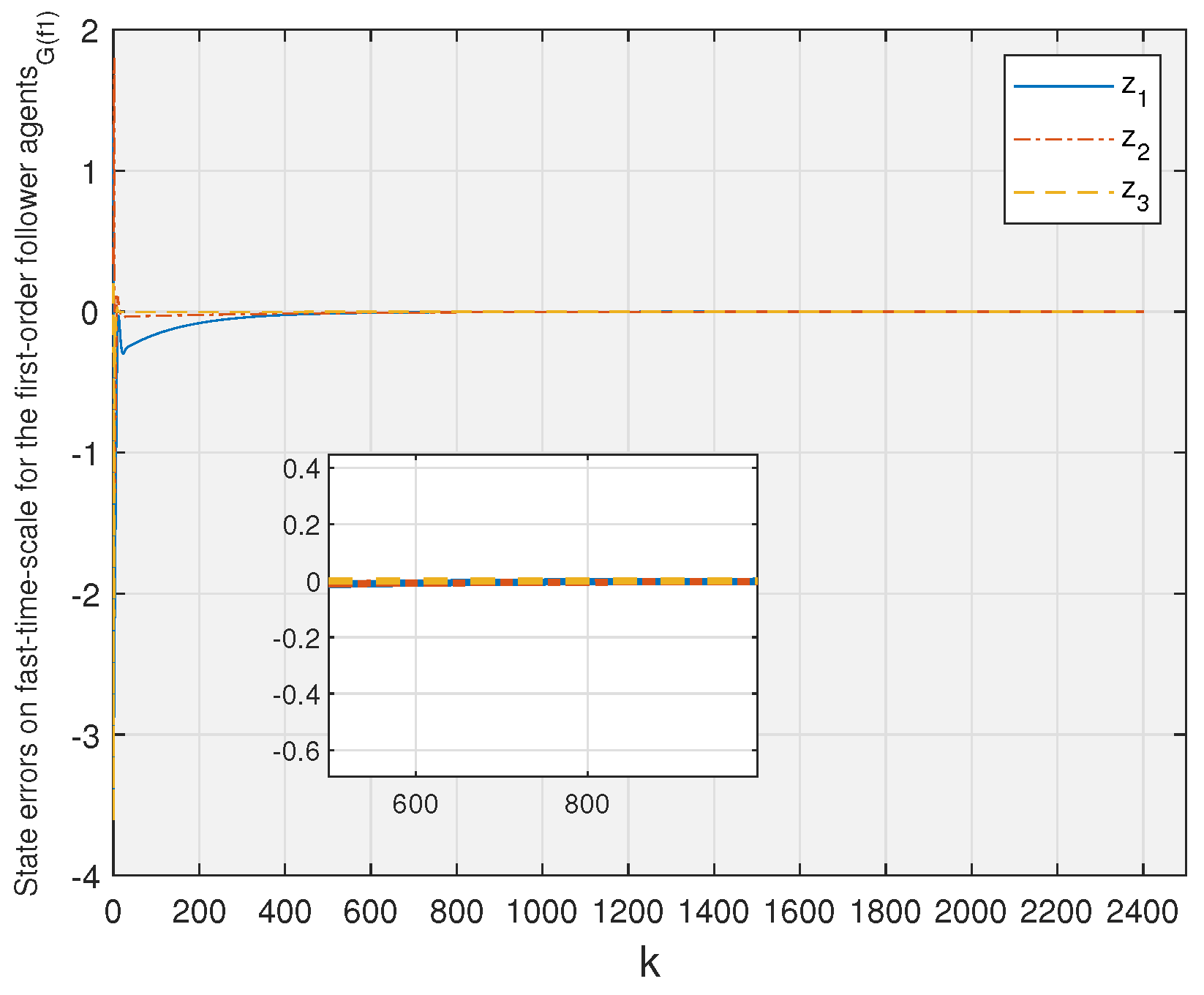
In order to clearly and intuitively observe the change of the state observation error of each follower agent in the whole MAS, the sum of the absolute value of the observation error of each dimensional state variable of each follower agent on the slow-time scale and the fast-time scale is considered (that is, the 1-norm of the state observation errors of each follower agent). Moreover, its change trajectory along with
k is shown in
Figure 7 and
Figure 8. As can be seen from the figures, the state errors of the whole MAS converge to zero.
Finally, the initial states, final states and trajectories of all followers are shown in
Figure 9. First-order and second-order agents are marked with circles and asterisks, respectively.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








