
Expected Waiting Times at an Intersection with a Green Extension Strategy for Freight Vehicles: An Analytical Analysis


Abstract
:1. Introduction
2. Related Work
3. The Analysis of the Expected Waiting Times
- The green time of a green time group can either be extended if a freight vehicle arrives during the green extension period or cannot. This is designed beforehand. is defined as the set of all green time groups that can extend their green time and as the set of all subsets of .
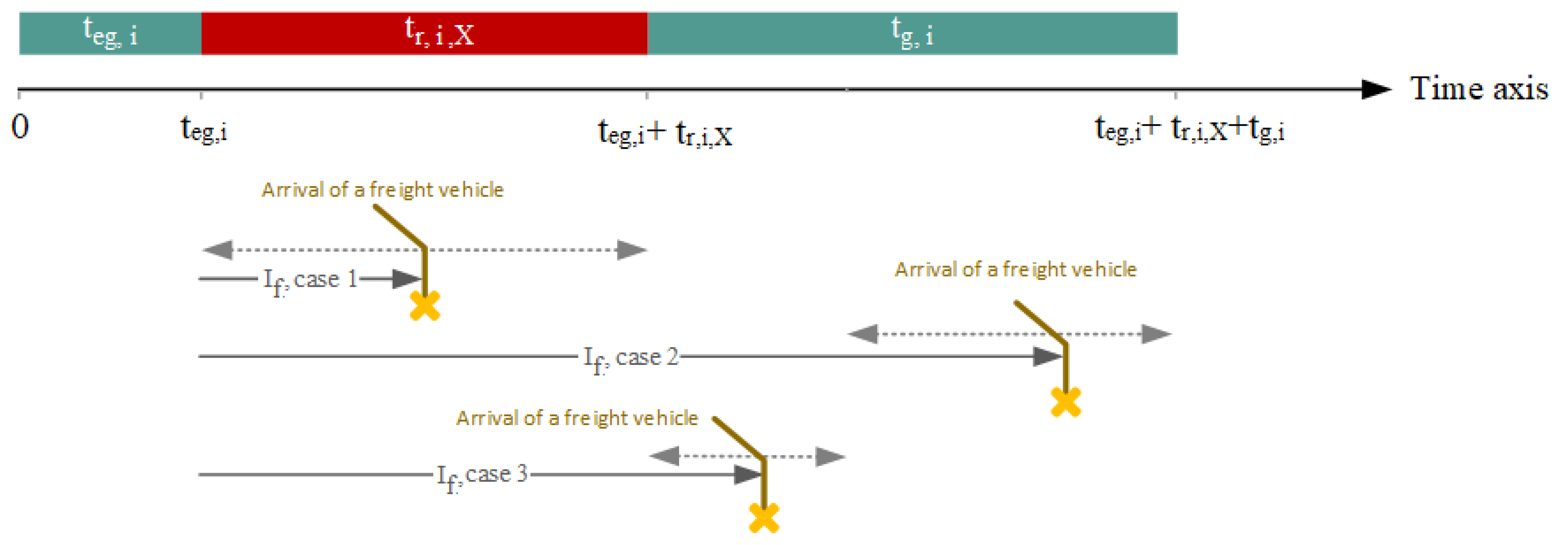
- Considering a certain green time group i, the extended green interval (if extension is possible), regular red and green times are indicated by , and , respectively, (all in terms of seconds). Regular red and green times are the periods when no green time group would have green extension. These times can not all be chosen independently, as for instance, is equal to plus lost time. In that respect, an extended green time of one green time group augments the red times of the other green time groups.
- We assume an undersaturated intersection. Therefore, we assume that arrivals of regular (index n) and freight vehicles (index f) in lane l of green time group i are independent Poisson processes (which can describe isolated intersections) with flow rates and (veh/s), respectively.
- If a vehicle does not have to stop at the intersection (because of a green phase and no queuing), its waiting time is assumed to be zero. However, if a vehicle has to stop, its waiting time is assumed to be the remaining red time (if any) and the time needed to pass the traffic light when the light turns green. After a stop-and-go event, we assume that regular vehicles and freight vehicles drive at constant speeds of and (m/s), respectively. We assume that . We do not consider accelerations, but we do assume that the dissipation speed of queues depends on the presence of freight vehicles in the queue.
- A regular vehicle occupies , and a freight vehicle occupies , meters of the road after stopping at the traffic light.
- We do not have overflow queues (i.e., all vehicles that arrived during a red period are assumed to leave the intersection during the next regular green period).
- For the analysis of the waiting times of vehicles in green time group i, we define a cycle for green time group i in such a way that each cycle ends with a regular green period for that green time group. By doing so, if the green period is extended, we regard the extension of that green period to be the start of the next cycle. For our analysis, this is the most natural assumption, but other definitions are possible as well, e.g., where the extension of a green period is still part of the previous cycle. Although this could lead to slightly different approximative results, we expect no big influence of this modeling choice.
- We define as the probability that a random cycle of green time group i, that has extension possibility, experiences a green extension of that green time group (in other words, a freight vehicle in green time group i arrives at the intersection during the green extension period). Recall that freight vehicles arrive according to Poisson processes and each green time group i consists of a number of lanes with arrival rates (for each lane l) for freight vehicles that all can cause green extension for the green time group. By taking these considerations into account and using properties of the Poisson processes, can be expressed as:where is the set of lanes of green time group i.
3.1. General Formulation
- Expected waiting time of a tagged regular vehicle arriving in a given lane of green time group i:
- Expected waiting time of a tagged freight vehicle arriving in a given lane of green time group i:
3.2. Different Cases of the Expected Waiting Time in a General Model
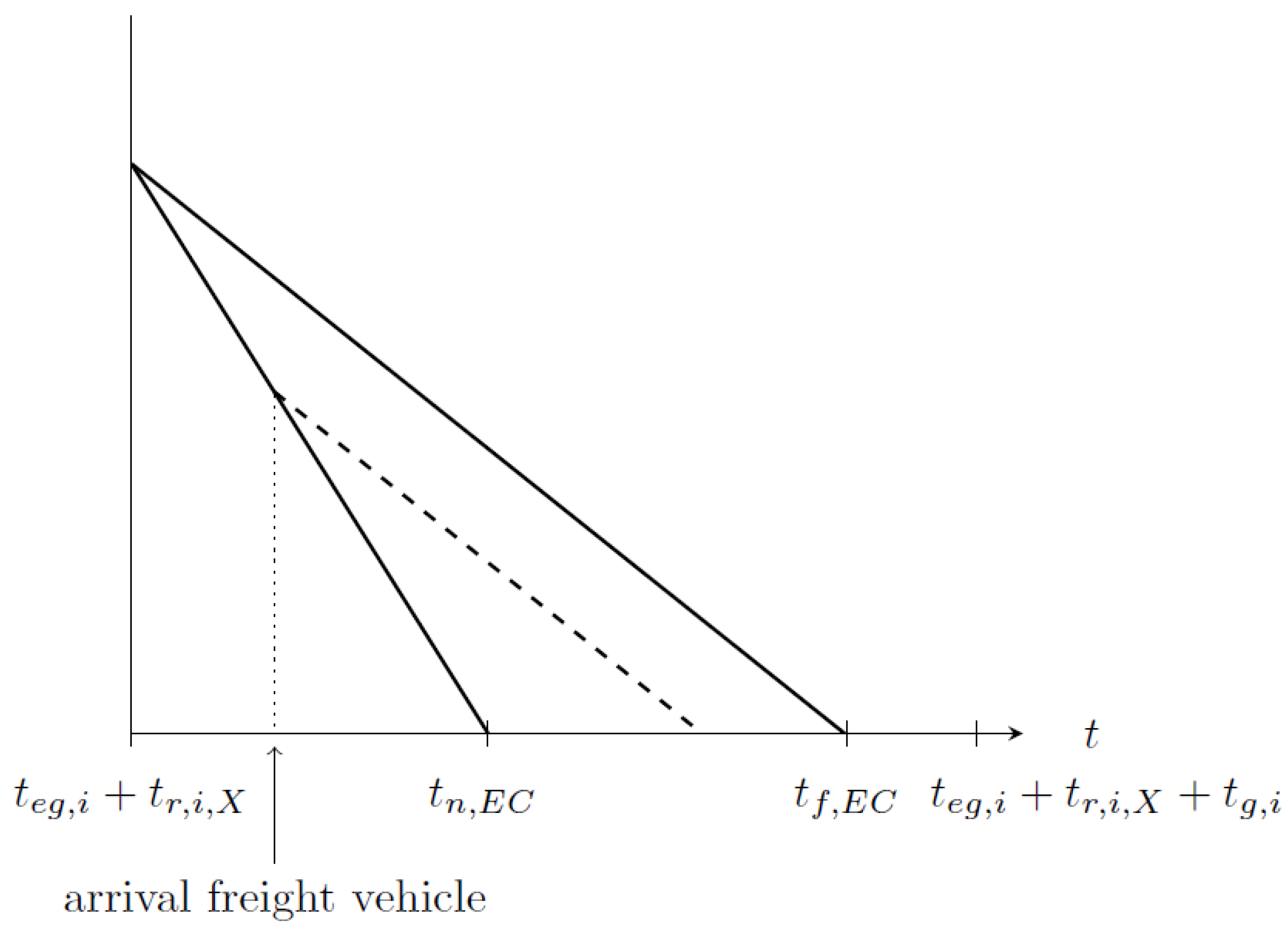
3.2.1. Case 1: Expected Waiting Time of a Tagged Regular Vehicle Arriving in an Extended Cycle
- the queued up vehicles (during the red period) dissolve at a deterministic speed as long as no freight vehicle is present;
- the queue dissolves at speed once a freight vehicle is present;
- newly arriving regular (freight) vehicles each add (, respectively) meters to the queue as long as the queue has not completely dissolved;
- when the queue has completely dissolved, it does not build up anymore during the green period (free flow), and the waiting time of newly arriving vehicles will be zero (see also [34]).
3.2.2. Case 2: Expected Waiting Time of a Tagged Regular Vehicle Arriving in a Regular Cycle
3.2.3. Case 3: Expected Waiting Time of a Tagged Freight Vehicle Arriving in an Extended Cycle
3.2.4. Case 4: Expected Waiting Time of a Tagged Freight Vehicle Arriving in a Regular Cycle
4. Numerical Examples
4.1. Formulation of the Basic Intersection
- a regular vehicle was assumed to occupy an average length of 8 m (5 m average length plus 3 m as an average buffer length);
- a freight vehicle was assumed to occupy an average length of 18 m (15 m average length plus 3 m as an average buffer length);
- the average speed for a regular vehicle to leave the intersection can be considered as 10 m/s [35];
- based on the results reported in [36], 5 m/s is a good estimation of the average speed for freight vehicles crossing the intersection;
- we have utilized the formulation proposed in [37] to calculate the optimal cycle length (without green extension) and the lengths of the regular red and green periods;
- a green extension interval of 10 s seems a natural choice;
- an illustration of the layout of the basic intersection is depicted in Figure 3.
4.2. Formulation of the Expected Waiting Time and the Optimal Extension Interval
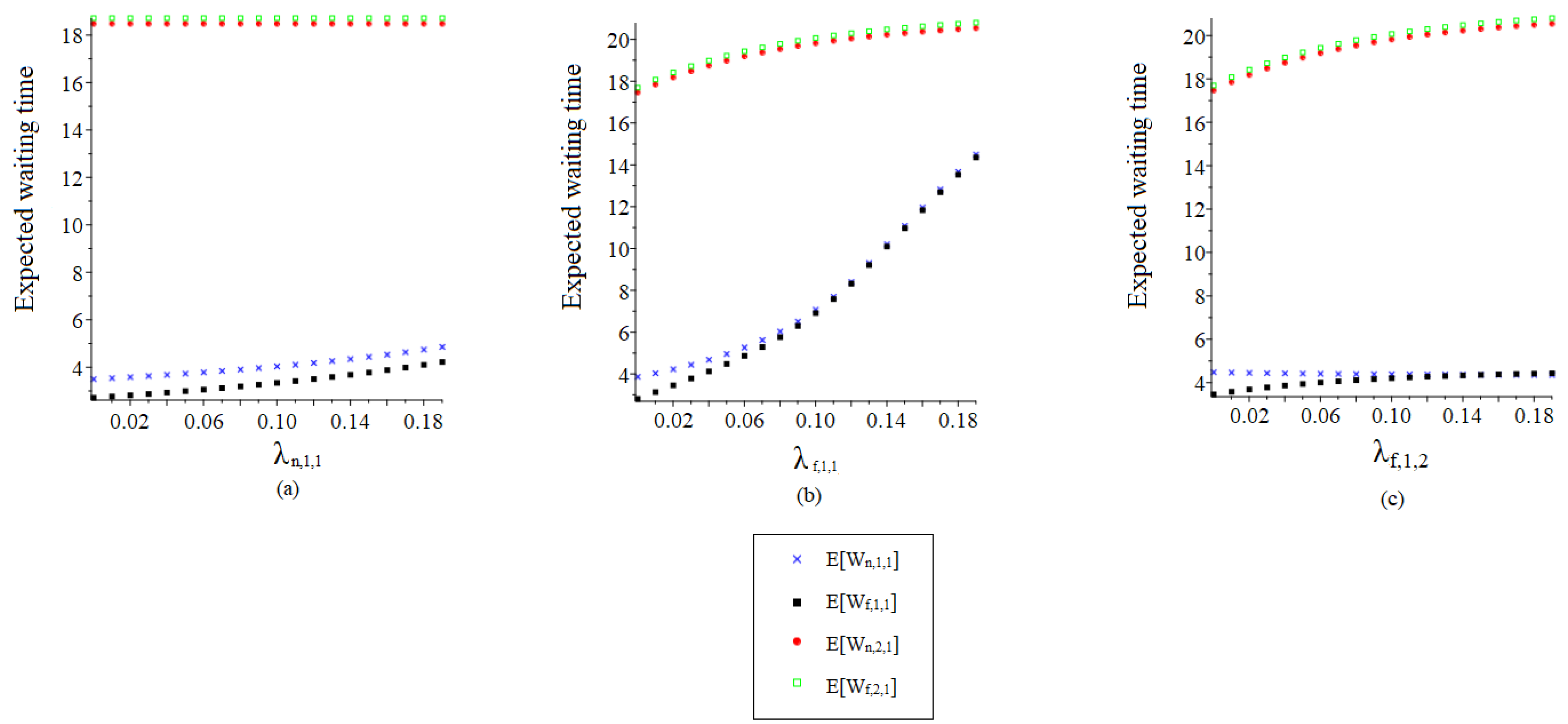
4.3. Expected Waiting Times
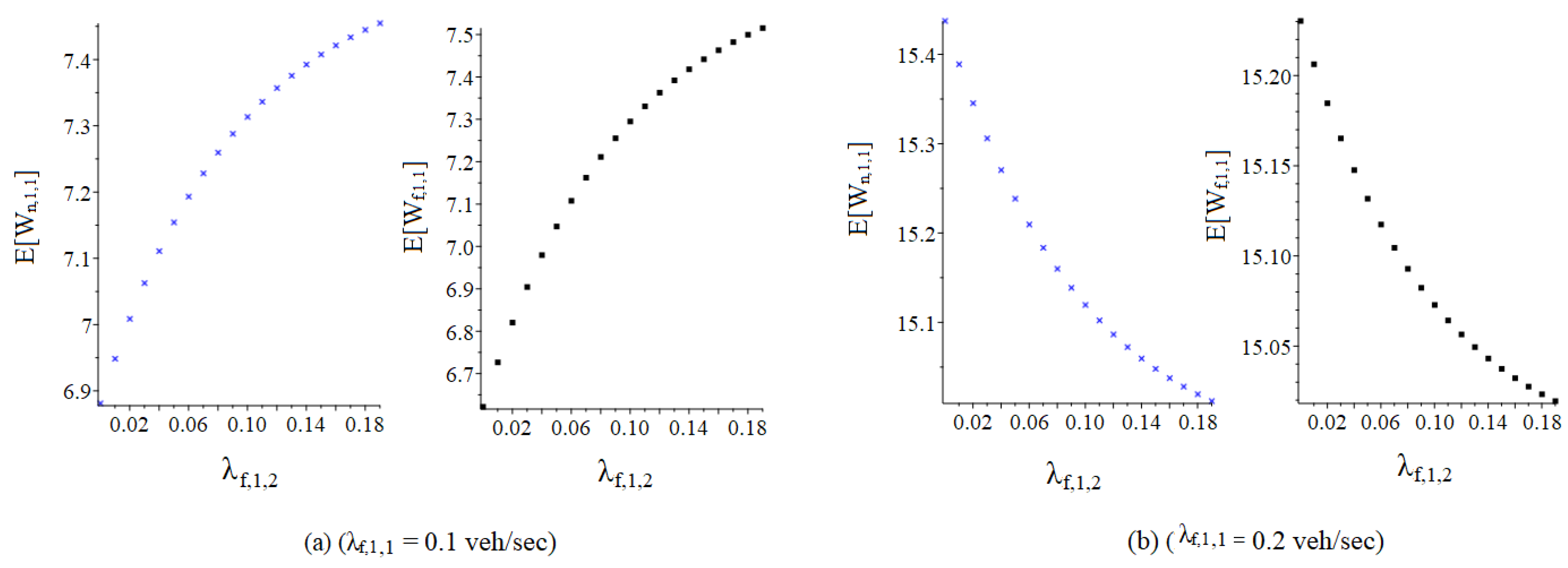
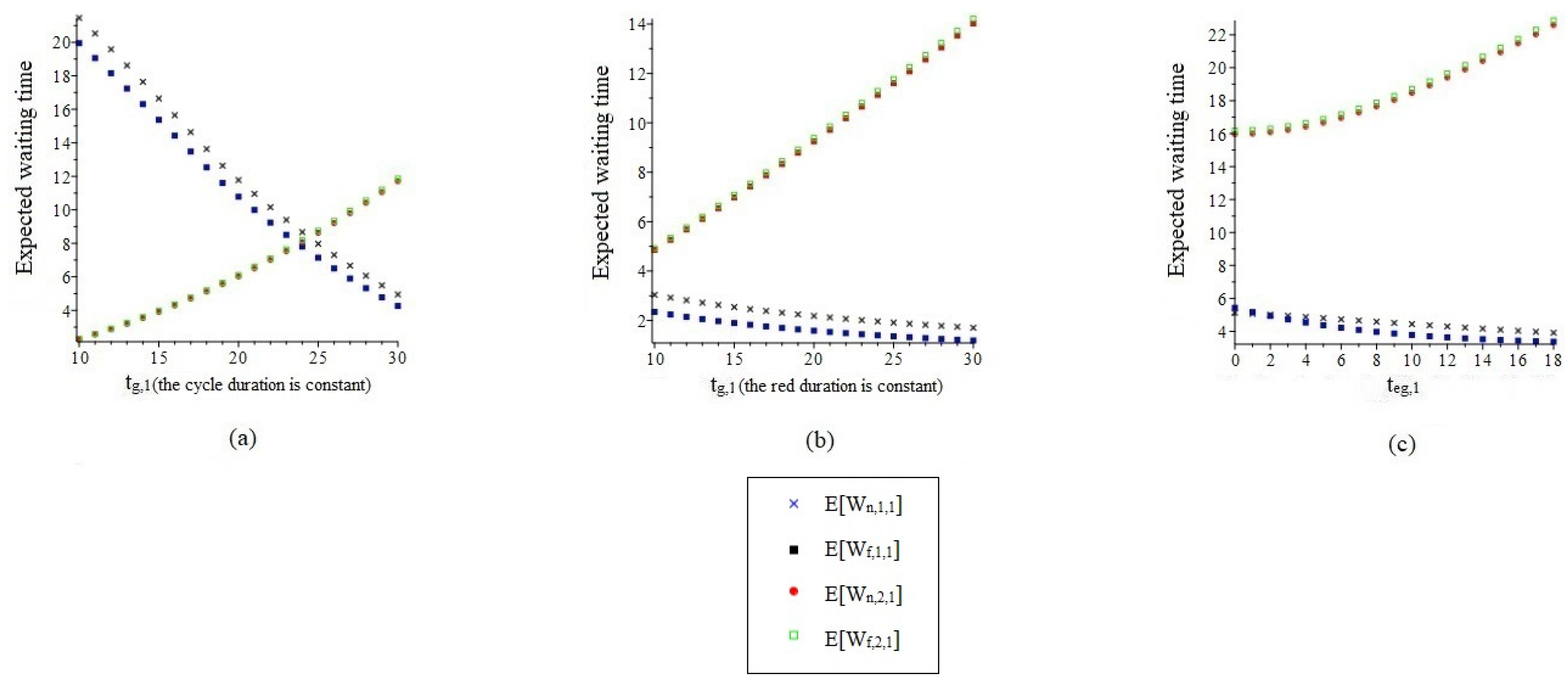
4.4. Sensitivity Analysis of Individual Parameters
- with constant cycle duration, the expected mean waiting times of vehicles on the main (side) road decrease (increases) drastically with increasing green time for the main road (Figure 6a);
- with constant red time for the main road, the mean expected waiting times of vehicles on the main road decrease mildly, while the mean expected waiting times of vehicles on the side road increase drastically with increasing green times for the main road (Figure 6b);
- a higher green time extension, on the one hand, has a varying positive effect on the expected waiting times of vehicles on the main road, and on the other hand, has a varying negative effect on the expected waiting times of vehicles on the side road (Figure 6c).
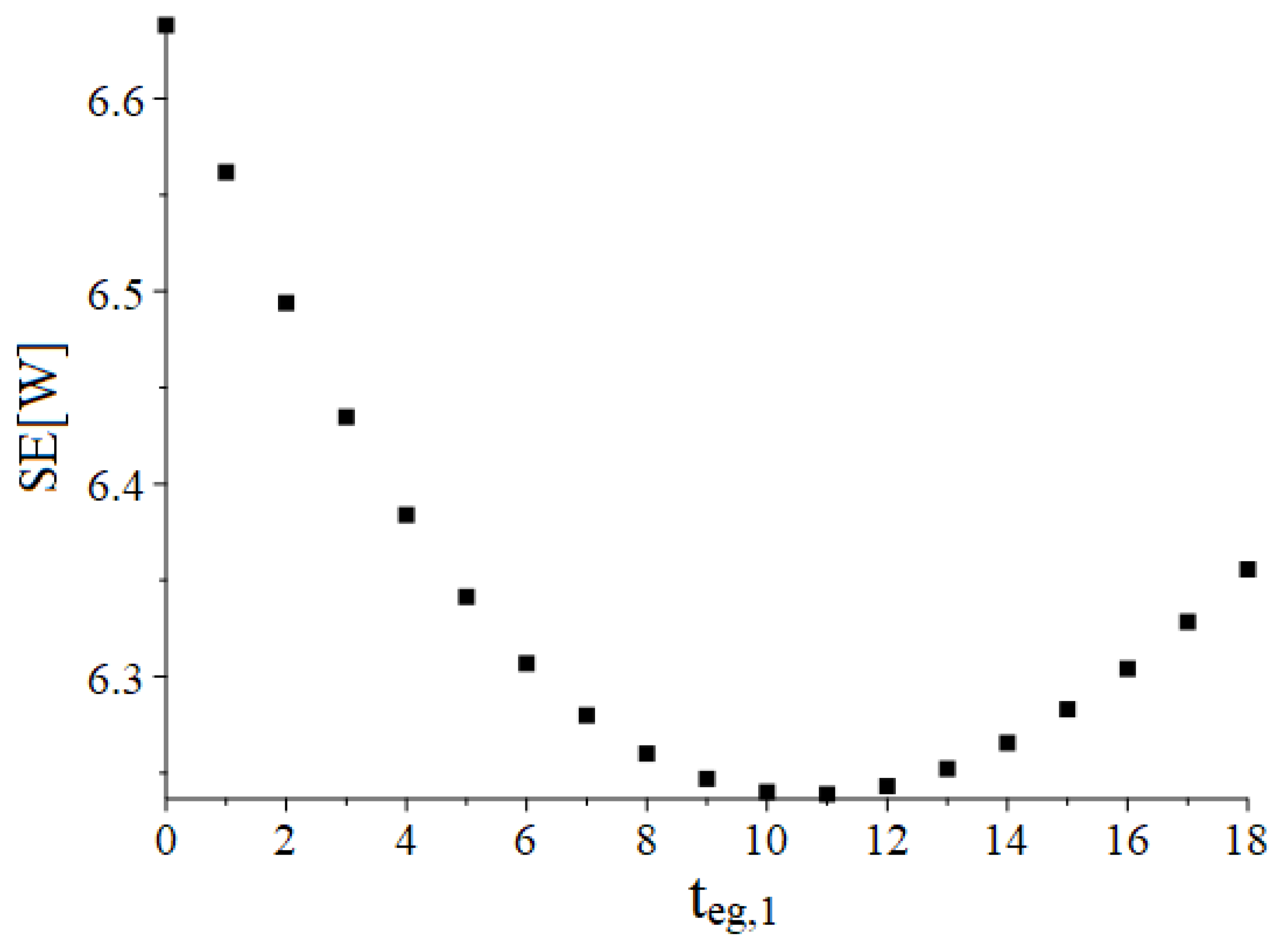
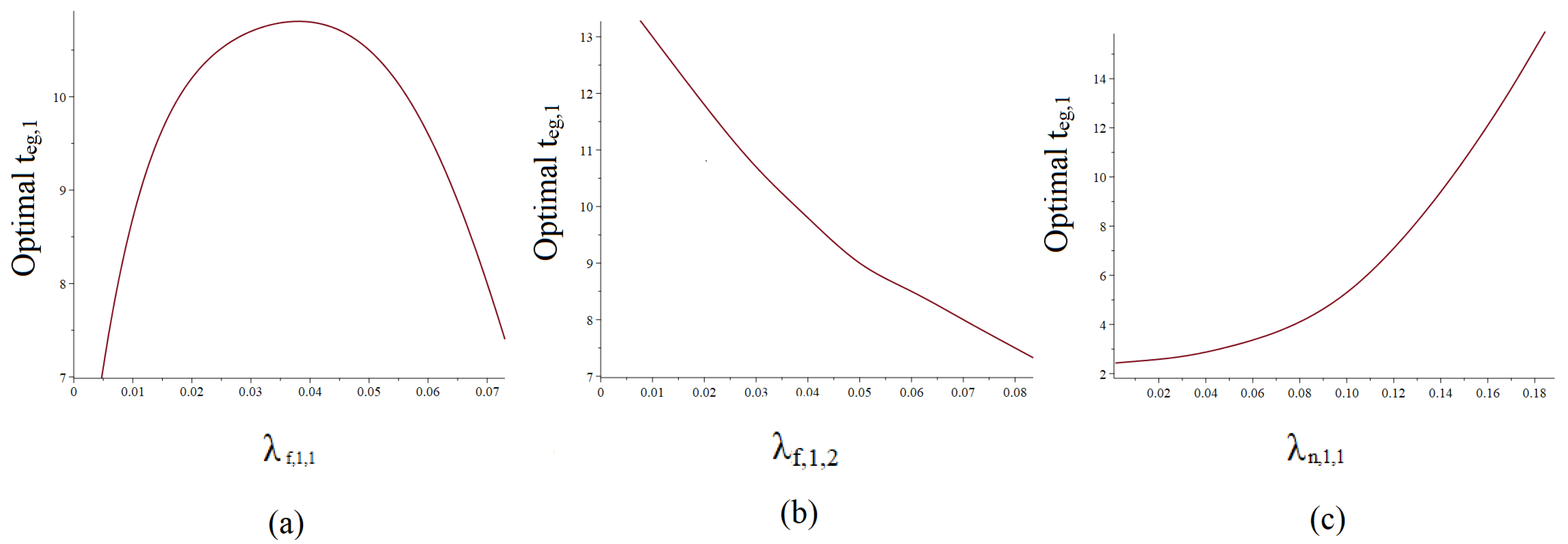
4.5. Optimal Extension Interval
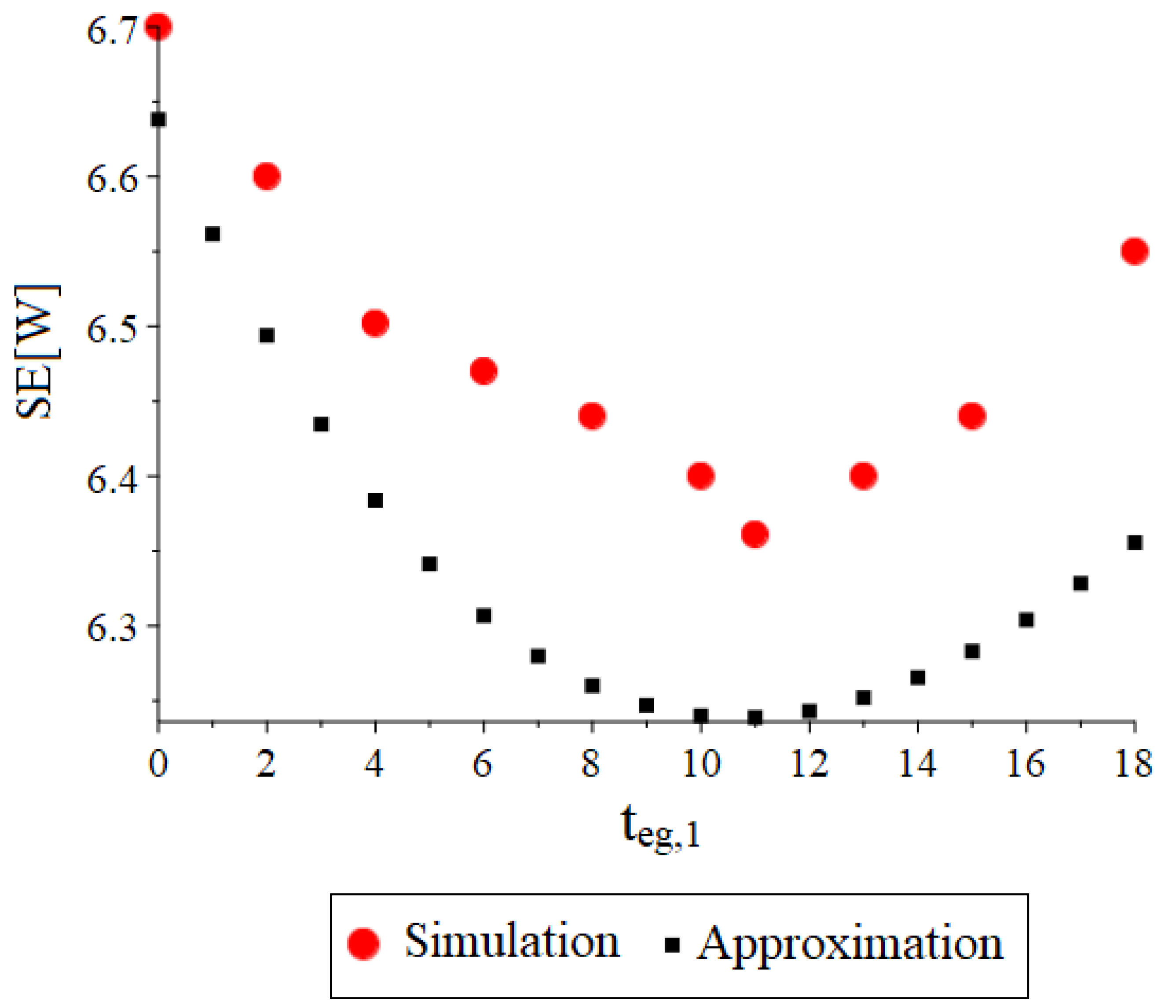
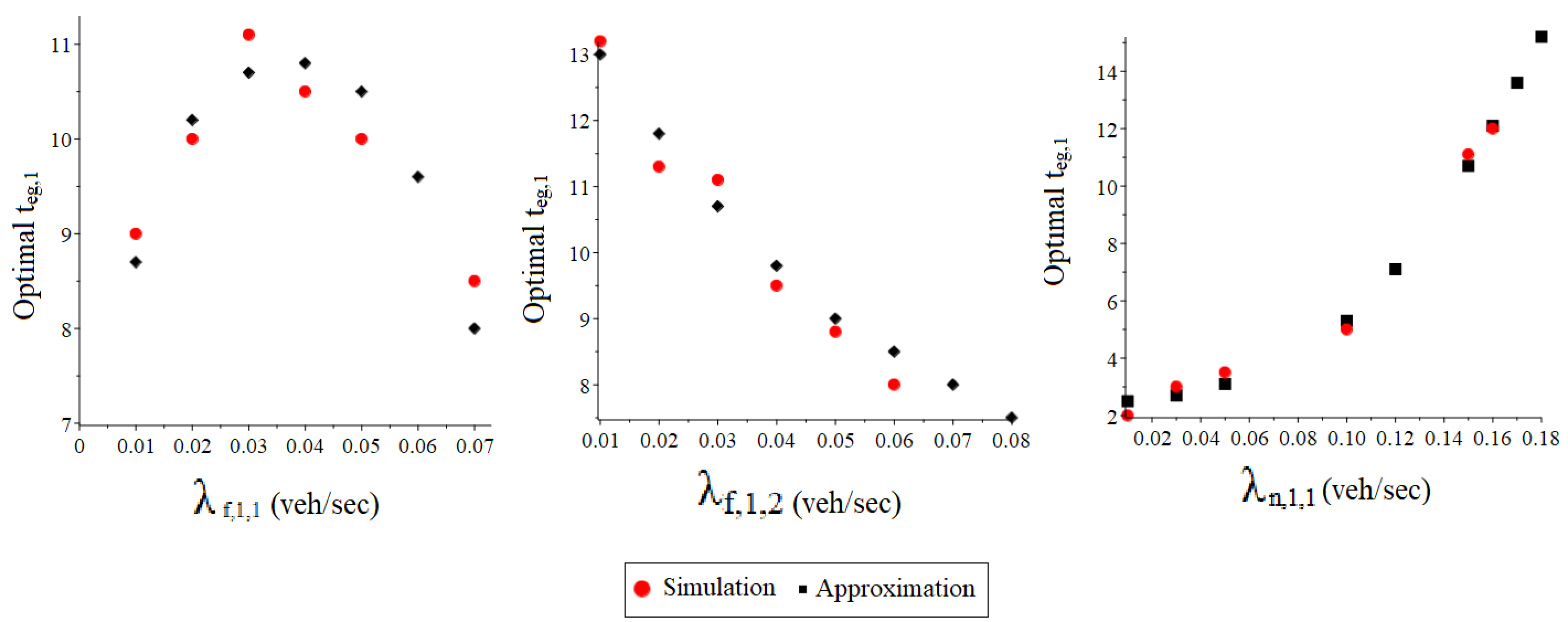
4.6. Validation of the Optimal Extension Interval
5. Conclusions
- decreases in the expected waiting times of regular and freight vehicles in green time groups capable of extending green time;
- an increase in the mean expected waiting time of vehicles in other green time groups.
- the proposed approximation can appropriately capture the effects of different traffic parameters to estimate expected waiting times;
- the accuracy of the approximation of the expected waiting time is acceptable;
- the optimal extension interval resulting from our analysis coincides with that from micro simulations.
- Extending the current analysis to more general arrival patterns to address traffic characteristics in a network of intersections. In this regard, the incorporation of batch arrivals (platoons) consisting of different vehicles is needed, similarly to the model presented in [38]. A second extension in this regard is multiple lanes per input–output pair of the intersection where vehicles can overtake each other.
- A proper queuing analysis (including overspill between cycles) is also interesting, although it could be a difficult task. In this case (an expected value of), the overflow queue should also be incorporated in the current analysis. To this end, the analysis presented in some related papers (e.g., [39,40]) can be helpful.
- Integrating this analysis in an advanced intelligent intersection controller to quantify its implications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Notation
| Parameters | |
| Green time interval length for green time group i (s = second) | |
| Green extension interval length for green time group i (s) | |
| Red time interval length for green time group i (s) | |
| Green extension interval length for the main road of the basic model (s) | |
| Red time interval length for the main road of the basic model (s) | |
| Green time interval length for the main road of the basic model (s) | |
| Green extension interval length for the side road of the basic model (s) | |
| Red time interval length for the side road of the basic model (s) | |
| Green time interval length for the side road of the basic model (s) | |
| Speed of regular vehicles (m/s = meter/s) | |
| Speed of freight vehicles (m/s) | |
| Arrival rate of regular vehicles on lane l of green time group i (veh/s = vehicle/second) | |
| Arrival rate of freight vehicles on lane l of green time group i (veh/s) basic model (veh/s) | |
| Average occupation length of a regular vehicle (m) | |
| Average occupation length of a freight vehicle (m) |
| Functions | |
| Probability that a random cycle of green time group i is extended | |
| Probability that a tagged regular vehicle on the studied lane of green time group i arrives in a cycle with green time extensions as specified by the set X | |
| Probability that a tagged freight vehicle on the studied lane of green time group i arrives in a cycle with green time extensions as specified by the set X | |
| Expected waiting time of a regular vehicle on the studied lane of green time group i | |
| Expected waiting time of a freight vehicle on the studied lane of green time group i | |
| () | Expected waiting time of a regular vehicle on the main road (side road) in the basic model |
| () | Expected waiting time of a freight vehicle on the main road (side road) in the basic model |
| The total number of regular vehicle arrivals on the studied lane in an interval of length t | |
| The total number of freight vehicle arrivals on the studied lane in an interval of length t | |
| Time between the point in a cycle and the first arrival of a freight vehicle in that cycle | |
| Sets | |
| Set of all green time groups that can extend their green time | |
| Set of all subsets of | |
| Set of lanes of green time group i | |
| X | Set of green time groups that are extended in the current cycle |
Appendix A. Reference Values of Parameters (Table 1)
Appendix A.1. Arrival Rates
Appendix A.2. Average Length of a Vehicle
Appendix A.3. Vehicle Speeds
Appendix A.4. Durations of Red, Green and Extended Green Periods
- speed at the intersection 50 km/h ⇒ orange time = 3 s;
- speed at the intersection 70 km/h ⇒ orange time = 4 s;
- speed at the intersection 90 km/h ⇒ orange time = 5 s.
References
- Holguín-Veras, J.; Leal, J.A.; Sánchez-Diaz, I.; Browne, M.; Wojtowicz, J. State of the art and practice of urban freight management: Part I: Infrastructure, vehicle-related, and traffic operations. Transp. Res. Part A Policy Pract. 2018, 137, 360–382. [Google Scholar] [CrossRef]
- Lafkihi, M.; Pan, S.; Ballot, E. Freight transportation service procurement: A literature review and future research opportunities in omnichannel E-commerce. Transp. Res. Part E Logist. Transp. Rev. 2019, 125, 348–365. [Google Scholar] [CrossRef]
- Xia, X.; Ma, X.; Wang, J. Control method for signalized intersection with integrated waiting area. Appl. Sci. 2019, 9, 968. [Google Scholar] [CrossRef]
- Blokpoel, R.; Hausberger, S.; Krajzewicz, D. Emission optimised control and speed limit for isolated intersections. IET Intell. Transp. Syst. 2017, 11, 174–181. [Google Scholar] [CrossRef]
- Moradi, H.; Sasaninejad, S.; Wittevrongel, S.; Walraevens, J. Proposal of an integrated platoon-based Round-Robin algorithm with priorities for intersections with mixed traffic flows. IET Intell. Transp. Syst. 2021, 15, 1106–1118. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, F. A real-time BRT signal priority approach through two-stage green extension. In Proceedings of the 2012 9th IEEE International Conference on Networking, Sensing and Control, Beijing, China, 11–14 April 2012; pp. 7–11. [Google Scholar]
- Niu, X.; Cao, H.; Zhao, Z.; Zhang, T. An optimized signal timing of Transit Signal Priority on early green control strategy. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 2552–2555. [Google Scholar]
- Lee, J.; Shalaby, A.; Greenough, J.; Bowie, M.; Hung, S. Advanced transit signal priority control with online microsimulation-based transit prediction model. Transp. Res. Rec. 2005, 1925, 185–194. [Google Scholar] [CrossRef]
- Truong, L.T.; Currie, G.; Wallace, M.; De Gruyter, C. Analytical approach to estimate delay reduction associated with bus priority measures. IEEE Intell. Transp. Syst. Mag. 2017, 9, 91–101. [Google Scholar] [CrossRef]
- Mei, Z.; Tan, Z.; Zhang, W.; Wang, D. Simulation analysis of traffic signal control and transit signal priority strategies under Arterial Coordination Conditions. Simulation 2019, 95, 51–64. [Google Scholar] [CrossRef]
- Abdy, Z.R.; Hellinga, B.R. Analytical method for estimating the impact of transit signal priority on vehicle delay. J. Transp. Eng. 2011, 137, 589–600. [Google Scholar] [CrossRef]
- Hongchao, L.; Zhang, J.; Cheng, D. Analytical approach to evaluating transit signal priority. J. Transp. Syst. Eng. Inf. Technol. 2008, 8, 48–57. [Google Scholar]
- Lin, Y.; Yang, X.; Zou, N.; Franz, M. Transit signal priority control at signalized intersections: A comprehensive review. Transp. Lett. 2015, 7, 168–180. [Google Scholar] [CrossRef]
- Heidemann, D. Queue length and delay distributions at traffic signals. Transp. Res. Part B Methodol. 1994, 28, 377–389. [Google Scholar] [CrossRef]
- Viti, F.; Van Zuylen, H.J. A probabilistic model for traffic at actuated control signals. Transp. Res. Part C Emerg. Technol. 2010, 18, 299–310. [Google Scholar] [CrossRef]
- Viti, F.; Van Zuylen, H.J. Probabilistic models for queues at fixed control signals. Transp. Res. Part B Methodol. 2010, 44, 120–135. [Google Scholar] [CrossRef]
- Estrada, M.; Mensión, J.; Aymamí, J.M.; Torres, L. Bus control strategies in corridors with signalized intersections. Transp. Res. Part C Emerg. Technol. 2016, 71, 500–520. [Google Scholar] [CrossRef]
- Gómez-Marín, C.G.; Arango-Serna, M.D.; Serna-Urán, C.A.; Zapata-Córtes, J.A. Microsimulation as an optimization tool for urban goods distribution: A review. In Proceedings of the MOVICI-MOYCOT 2018: Joint Conference for Urban Mobility in the Smart City, IET, Medellin, Colombia, 18–20 April 2018; pp. 1–8. [Google Scholar]
- Gomez-Marin, C.G.; Serna-Uran, C.A.; Arango-Serna, M.D.; Comi, A. Microsimulation-based collaboration model for urban freight distribution. IEEE Access 2020, 8, 182853–182867. [Google Scholar] [CrossRef]
- Ye, B.L.; Wu, W.; Ruan, K.; Li, L.; Chen, T.; Gao, H.; Chen, Y. A survey of model predictive control methods for traffic signal control. IEEE/CAA J. Autom. Sin. 2019, 6, 623–640. [Google Scholar] [CrossRef]
- Li, P.; Wang, T.; Kang, Y.; Li, K.; Zhao, Y.B. Event-based model predictive control for nonlinear systems with dynamic disturbance. Automatica 2022, 145, 110533. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Improving the Performance of Single-Intersection Urban Traffic Networks Based on a Model Predictive Controller. Sustainability 2021, 13, 5630. [Google Scholar] [CrossRef]
- Moradi, H.; Sasaninejad, S.; Wittevrongel, S.; Walraevens, J. The contribution of connected vehicles to network traffic control: A hierarchical approach. Transp. Res. Part C Emerg. Technol. 2022, 139, 103644. [Google Scholar] [CrossRef]
- Zhang, T.; Song, W.; Fu, M.; Yang, Y.; Wang, M. Vehicle motion prediction at intersections based on the turning intention and prior trajectories model. IEEE/CAA J. Autom. Sin. 2021, 8, 1657–1666. [Google Scholar] [CrossRef]
- Ma, Y.; Sun, C.; Chen, J.; Cao, D.; Xiong, L. Verification and validation methods for decision-making and planning of automated vehicles: A review. IEEE Trans. Intell. Veh. 2022, 7, 480–498. [Google Scholar] [CrossRef]
- Qi, L.; Zhou, M.; Luan, W. Impact of driving behavior on traffic delay at a congested signalized intersection. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1882–1893. [Google Scholar] [CrossRef]
- Farid, Y.Z.; Christofa, E.; Collura, J. An analytical model to conduct a person-based evaluation of transit preferential treatments on signalized arterials. Transp. Res. Part C Emerg. Technol. 2018, 90, 411–432. [Google Scholar] [CrossRef]
- Moradi, H.; Sasaninejad, S.; Wittevrongel, S.; Walraevens, J. Dynamically estimating saturation flow rate at signalized intersections: A data-driven technique. Transp. Plan. Technol. 2023; accepted. [Google Scholar] [CrossRef]
- Sunkari, S.R.; Beasley, P.S.; Urbanik, T.; Fambro, D.B. Model to evaluate the impacts of bus priority on signalized intersections. Transp. Res. Rec. 1995, 15, 117–123. [Google Scholar]
- Highway Capacity Manual; Special Report 209; National Research Council: Washington, DC, USA, 1985.
- Jacobson, J.; Sheffi, Y. Analytical model of traffic delays under bus signal preemption: Theory and application. Transp. Res. Part B Methodol. 1981, 15, 127–138. [Google Scholar] [CrossRef]
- Lin, W.H. Quantifying delay reduction to buses with signal priority treatment in mixed-mode operation. Transp. Res. Rec. 2002, 1811, 100–106. [Google Scholar] [CrossRef]
- Walraevens, J.; Maertens, T.; Wittevrongel, S. Extensions of green periods for freight vehicles at signalized intersections: A stochastic analysis. In Proceedings of the 13th International Conference on Queueing Theory and Network Applications (QTNA2018), Tsukuba City, Japan, 25–27 July 2018; pp. 69–73. [Google Scholar]
- van Leeuwaarden, J.S. Delay analysis for the fixed-cycle traffic-light queue. Transp. Sci. 2006, 40, 189–199. [Google Scholar] [CrossRef]
- Rouffaert, A.; van ’t Hof, M.; Poelmans, W. Veilige wegen en kruispunten; Agentschap Wegen en Verkeer: Brussels, Belgium, 2009. [Google Scholar]
- Yang, G.; Xu, H.; Wang, Z.; Tian, Z. Truck acceleration behavior study and acceleration lane length recommendations for metered on-ramps. Int. J. Transp. Sci. Technol. 2016, 5, 93–102. [Google Scholar] [CrossRef]
- Wolput, B.; Christofa, E.; Tampère, C.M. Optimal cycle-length formulas for intersections with or without transit signal priority. Transp. Res. Rec. 2016, 2558, 78–91. [Google Scholar] [CrossRef]
- Pang, G.; Whitt, W. Infinite-server queues with batch arrivals and dependent service times. Probab. Eng. Inf. Sci. 2012, 26, 197–220. [Google Scholar] [CrossRef]
- Liu, H.X.; Wu, X.; Ma, W.; Hu, H. Real-time queue length estimation for congested signalized intersections. Transp. Res. Part C Emerg. Technol. 2009, 17, 412–427. [Google Scholar] [CrossRef]
- Comert, G.; Cetin, M. Queue length estimation from probe vehicle location and the impacts of sample size. Eur. J. Oper. Res. 2009, 197, 196–202. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| = = veh/s (540 veh/h) | = = veh/s (108 veh/h) |
| = = veh/s (75 veh/h) | = = veh/s (25 veh/h) |
| m | m |
| m/s | m/s |
| s | s |
| s | s |
| Expected Waiting Time for a Green Extension Strategy | Expected Waiting Time in the Pre-Timed Setting |
|---|---|
| = s | = s |
| = s | = s |
| = s | = s |
| = s | = s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sasaninejad, S.; Van Malderen, J.; Walraevens, J.; Wittevrongel, S. Expected Waiting Times at an Intersection with a Green Extension Strategy for Freight Vehicles: An Analytical Analysis. Mathematics 2023, 11, 721. https://doi.org/10.3390/math11030721
Sasaninejad S, Van Malderen J, Walraevens J, Wittevrongel S. Expected Waiting Times at an Intersection with a Green Extension Strategy for Freight Vehicles: An Analytical Analysis. Mathematics. 2023; 11(3):721. https://doi.org/10.3390/math11030721
Chicago/Turabian StyleSasaninejad, Sara, Joris Van Malderen, Joris Walraevens, and Sabine Wittevrongel. 2023. "Expected Waiting Times at an Intersection with a Green Extension Strategy for Freight Vehicles: An Analytical Analysis" Mathematics 11, no. 3: 721. https://doi.org/10.3390/math11030721
APA StyleSasaninejad, S., Van Malderen, J., Walraevens, J., & Wittevrongel, S. (2023). Expected Waiting Times at an Intersection with a Green Extension Strategy for Freight Vehicles: An Analytical Analysis. Mathematics, 11(3), 721. https://doi.org/10.3390/math11030721