
Lagrangian Heuristic for Multi-Depot Technician Planning of Product Distribution and Installation with a Lunch Break


Abstract
1. Introduction
2. Literature Review
3. Problem Definition and Model Formulation
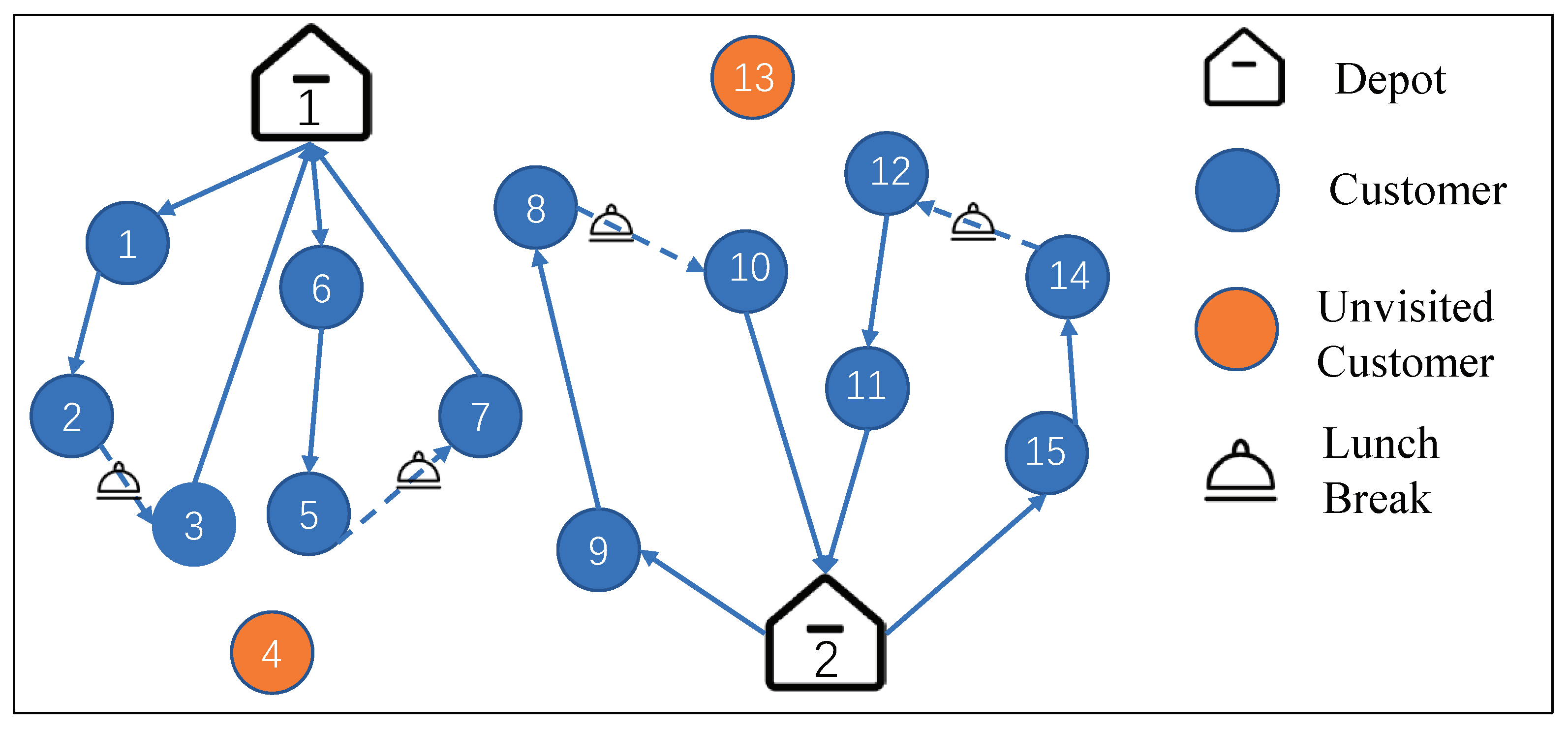
3.1. Problem Description
- Each customer requires technicians in certain skill areas with different levels of proficiency, and the technicians from the same depot can form technician groups to serve the customers.
- The comprehensive qualifications of the members of a technician group assigned to a customer must meet the skill requirements of the customer, and assigning “overqualified” groups is permitted at no additional cost. In what follows, we refer to the qualification combination of the members of a technician group as the group qualification of the group.
- A technician group is allowed to arrive at the location of customer i before and wait until the customer becomes available, and arrival after is permitted at an additional penalty cost depending on how late it is. However, the maximum lateness is limited, i.e., the service start time at customer i cannot be later than a threshold .
- A lunch break is needed in the planning horizon, which can be scheduled at any time within a predefined time interval. The services for customers cannot be interrupted by lunch breaks.
- If the technician groups cannot provide a service to a certain customer due to the capacity limit, the customer can be outsourced at an additional outsourcing cost.
- Traversing each arc incurs a fixed travel cost.
3.2. Model Formulation
4. Lagrangian Relaxation
4.1. Bidirectional Labeling Algorithm for the Lagrangian Sub-Problem
4.1.1. Label Structure
4.1.2. Propagation
4.1.3. Dominance Test
4.1.4. Concatenate
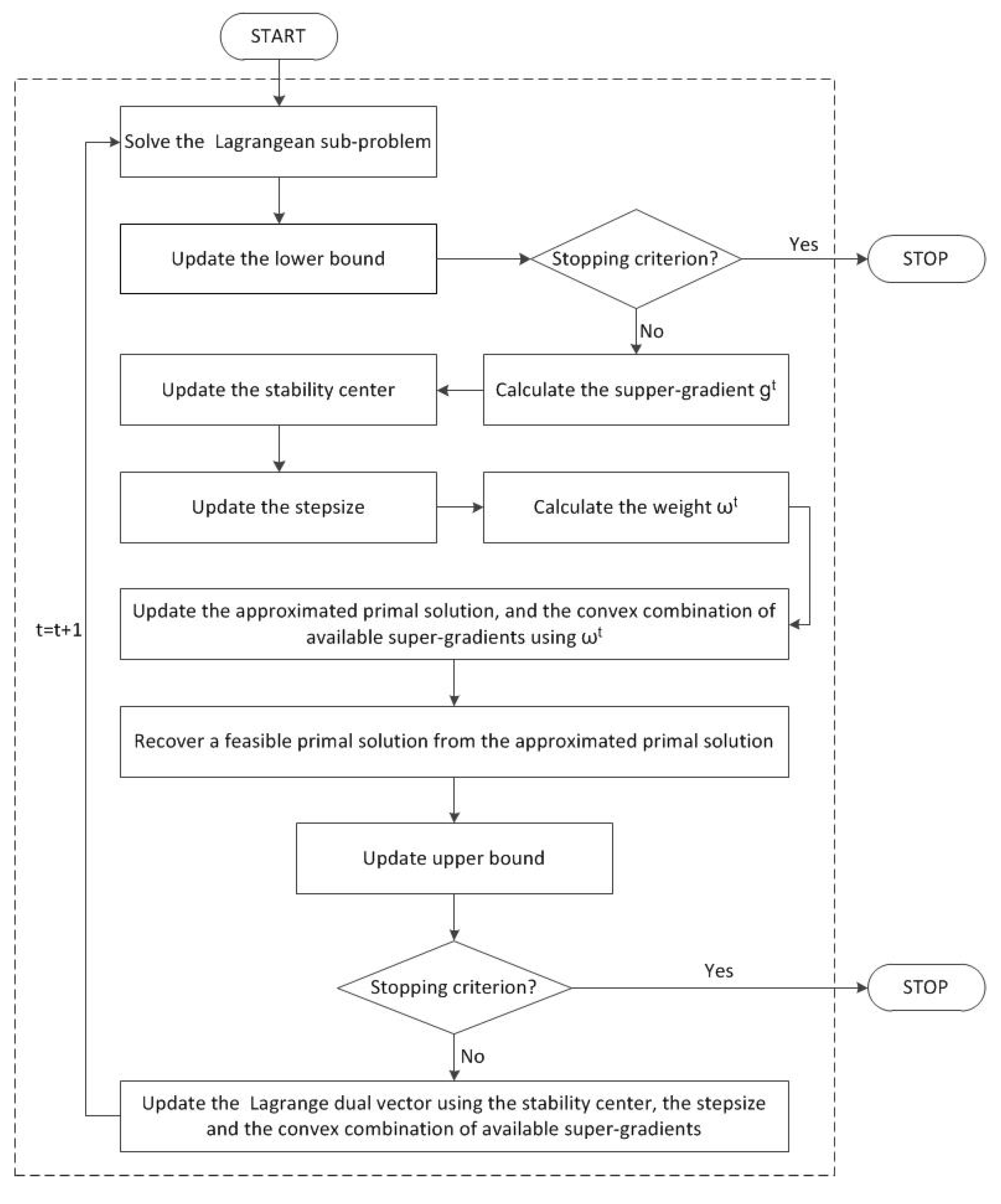
4.2. The Lagrangian Heuristic
4.3. Upper-Bound Generation Based on the Lagrangian Solutions
4.3.1. A Feasibility Recovery Procedure
4.3.2. Upper-Bound Improvement: TS Algorithm
5. Computational Results
5.1. Problem Instances
5.2. Impact of Algorithm for Improving the Upper Bound
5.3. Algorithmic Performance
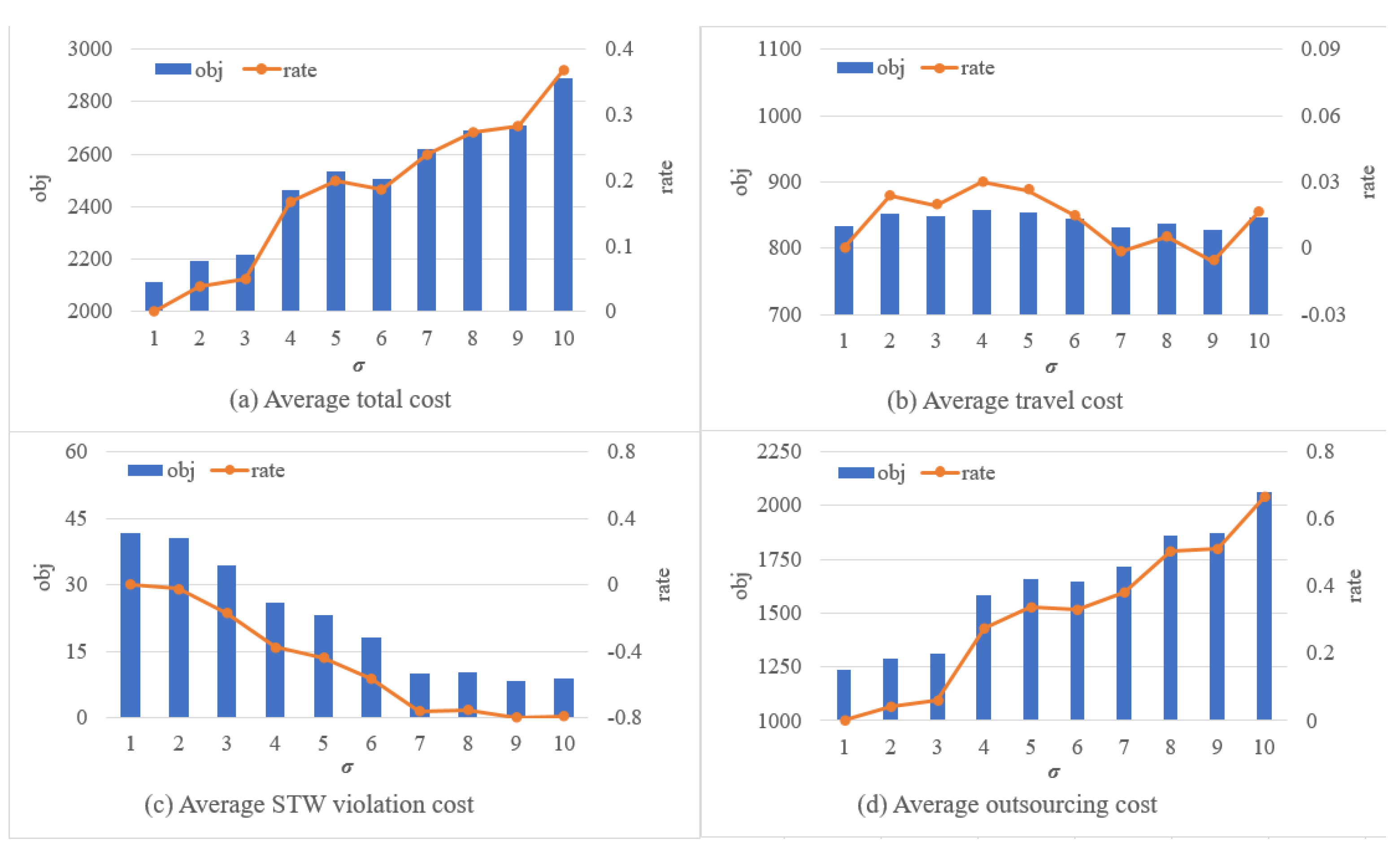
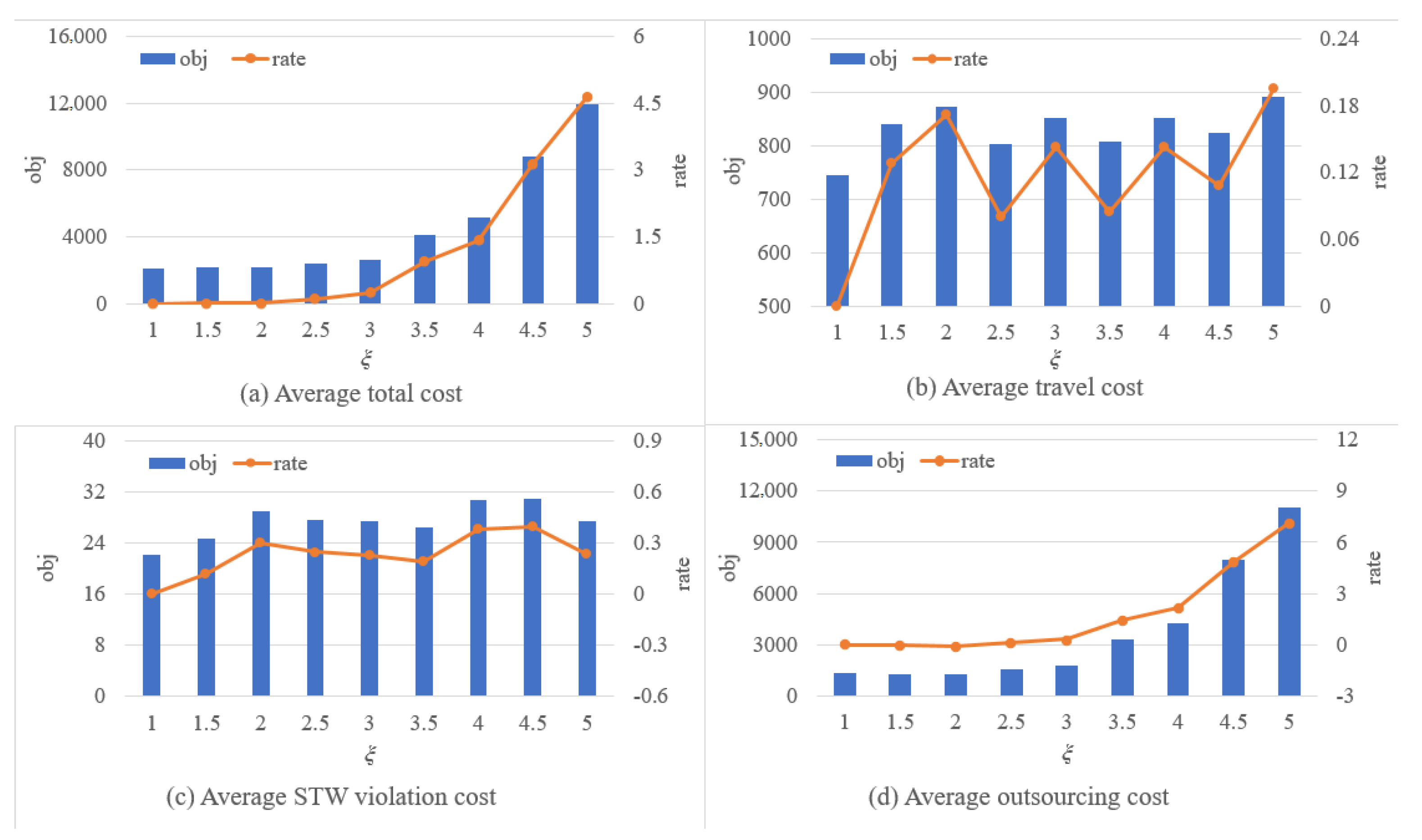
5.4. Sensitivity Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Pseudo-Code of the Lagrangian-Based Heuristic
| Algorithm A1:Algorithm LBH |
 |
References
- Goel, A.; Irnich, S. An exact method for vehicle routing and truck driver scheduling problems. Transp. Sci. 2017, 51, 737–754. [Google Scholar] [CrossRef]
- Huang, F.; Chen, J.H.; Sun, L.H.; Zhang, Y.Q.; Yao, S.J. Value-based contract for smart operation and maintenance service based on equitable entropy. Int. J. Prod. Res. 2020, 58, 1271–1284. [Google Scholar] [CrossRef]
- He, N.; Jiang, Z.Z.; Wang, J.; Sun, M.H.; Xie, G.H. Maintenance optimisation and coordination with fairness concerns for the service-oriented manufacturing supply chain. Enterp. Inf. Syst. 2020, 15, 694–724. [Google Scholar] [CrossRef]
- Orsdemir, A.; Deshpande, V.; Parlakturk, A.K. Is servicization a win-win strategy? Profitability and environmental implications of servicization. M&SOM-Manuf. Serv. Op. 2019, 21, 674–691. [Google Scholar]
- Castillo-Salazar, J.A.; Landa-Silva, D.; Qu, R. Workforce scheduling and routing problems: Literature survey and computational study. Ann. Oper. Res. 2016, 239, 39–67. [Google Scholar] [CrossRef]
- Cissá, M.; Yalçındağ, S.; Kergosien, Y.; Şahin, E.; Lenté, C.; Matta, A. OR problems related to Home Health Care: A review of relevant routing and scheduling problems. Oper. Res. Health Care 2017, 13–14, 1–22. [Google Scholar] [CrossRef]
- Fikar, C.; Hirsch, P. Home health care routing and scheduling: A review. Comput. Oper. Res. 2017, 77, 86–95. [Google Scholar] [CrossRef]
- Dutot, P.F.; Laugier, A.; Bustos, A.M. Technicians and Interventions Scheduling for Telecommunications. France Telecom R&D. August 2006. Available online: https://www.roadef.org/challenge/2007/files/sujet2.en.pdf (accessed on 8 December 2022).
- Chen, G.; He, W.; Leung, L.C.; Lan, T.; Han, Y. Assigning licenced technicians to maintenance tasks at aircraft maintenance base: A bi-objective approach and a Chinese airline application. Int. J. Prod. Res. 2017, 55, 5550–5563. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Laporte, G.; Pasin, F.; Ropke, S. Scheduling technicians and tasks in a telecommunications company. J. Sched. 2010, 13, 393–409. [Google Scholar] [CrossRef]
- Kovacs, A.A.; Parragh, S.N.; Doerner, K.F.; Hartl, R.F. Adaptive large neighborhood search for service technician routing and scheduling problems. J. Scheduling 2012, 15, 579–600. [Google Scholar] [CrossRef]
- Zamorano, E.; Stolletz, R. Branch-and-price approaches for the multiperiod technician routing and scheduling problem. Eur. J. Oper. Res. 2017, 257, 55–68. [Google Scholar] [CrossRef]
- Chen, X.; Thomas, B.W.; Hewitt, M. The technician routing problem with experience-based service times. Omega 2016, 61, 49–61. [Google Scholar] [CrossRef]
- Qiu, H.; Wang, D.; Yin, Y.; Cheng, T.C.E.; Wang, Y. An exact solution method for home health care scheduling with synchronized services. Nav. Res. Logist. 2022, 69, 715–733. [Google Scholar] [CrossRef]
- Schrotenboer, A.H.; uit het Broek, M.A.J.; Jargalsaikhan, B.; Roodbergen, K.J. Coordinating technician allocation and maintenance routing for offshore wind farms. Comput. Oper. Res. 2018, 98, 185–197. [Google Scholar] [CrossRef]
- Liu, X.; Wang, D.; Yin, Y.; Cheng, T.C.E. Robust optimization for the electric vehicle pickup and delivery problem with time windows and uncertain demands. Comput. Oper. Res. 2023, 151, 106119. [Google Scholar] [CrossRef]
- Zou, Y.; Wu, H.; Yin, Y.; Dhamotharan, L.; Chen, D.; Kumar, A. An improved transformer model with multi-head attention and attention to attention for low-carbon multi-depot vehicle routing problem. Ann. Oper. Res. 2022, 1–20. [Google Scholar] [CrossRef]
- Bostel, N.; Dejax, P.; Guez, P.; Tricoire, F. Multiperiod planning and routing on a rolling horizon for field force optimization logistics. In The Vehicle Routing Problem: Latest Advances and New Challenges, Chapter 3. In Operations Research/Computer Science Interfaces; Golden, B., Raghavan, S., Wasil, E., Eds.; Springer: Boston, MA, USA, 2008; Volume 43, pp. 503–525. [Google Scholar]
- Shao, Y.; Bard, J.F.; Jarrah, A.I. The therapist routing and scheduling problem. IIE Trans. 2012, 44, 868–893. [Google Scholar] [CrossRef]
- Trautsamwieser, A.; Hirsch, P. A Branch-price-and-cut approach for solving the medium-term home health care planning problem. Networks 2014, 64, 143–159. [Google Scholar] [CrossRef]
- Coelho, L.C.; Gagliardi, J.P.; Renaud, J.; Ruiz, A. Solving the vehicle routing problem with lunch break arising in the furniture delivery industry. J. Oper. Res. Soc. 2016, 67, 743–751. [Google Scholar] [CrossRef]
- Liu, R.; Yuan, B.; Jiang, Z. Mathematical model and exact algorithm for the home care worker scheduling and routing problem with lunch break requirements. Int. J. Prod. Res. 2017, 55, 558–575. [Google Scholar] [CrossRef]
- Cortés, C.E.; Gendreau, M.; Rousseau, L.M.; Souyris, S.; Weintraub, A. Branch-and-price and constraint programming for solving a real-life technician dispatching problem. Eur. J. Oper. Res. 2014, 238, 300–312. [Google Scholar] [CrossRef]
- Yuan, B.; Liu, R.; Jiang, Z. Daily scheduling of caregivers with stochastic times. Int. J. Prod. Res. 2018, 56, 3245–3261. [Google Scholar] [CrossRef]
- Souffriau, W.; Vansteenwegen, P.; Vanden Berghe, G.; Van Oudheusden, D. The multiconstraint team orienteering problem with multiple time windows. Transp. Sci. 2013, 47, 53–63. [Google Scholar] [CrossRef]
- Tang, H.; Miller-Hooks, E.; Tomastik, R. Scheduling technicians for planned maintenance of geographically distributed equipment. Transp. Res. Part E Logist. Transp. Rev. 2007, 43, 591–609. [Google Scholar] [CrossRef]
- Delgoshaei, A.; Ariffin, M.K.A.; Ali, A. A multi-period scheduling method for trading-off between skilled-workers allocation and outsource service usage in dynamic CMS. Int. J. Prod. Res. 2017, 55, 997–1039. [Google Scholar] [CrossRef]
- Hashimoto, H.; Boussier, S.; Vasquez, M.; Wilbaut, C. A GRASP-based approach for technicians and interventions scheduling for telecommunications. Ann. Oper. Res. 2011, 183, 143–161. [Google Scholar] [CrossRef]
- Gendron, B.; Khuong, P.V.; Semet, F. A Lagrangian-based branch-and-bound algorithm for the two-level uncapacitated facility location problem with single-assignment constraints. Transp. Sci. 2016, 50, 1286–1299. [Google Scholar] [CrossRef]
- Jena, S.D.; Cordeau, J.F.; Gendron, B. Lagrangian heuristics for large-scale dynamic facility location with generalized modular capacities. INFORMS J. Comput. 2017, 29, 388–404. [Google Scholar] [CrossRef]
- Cui, H.; Luo, X.; Wang, Y. Scheduling of steelmaking-continuous casting process with different processing routes using effective surrogate Lagrangian relaxation approach and improved concave-onvex procedure. Int. J. Prod. Res. 2022, 60, 3435–3460. [Google Scholar] [CrossRef]
- Demantova, B.E.; Scarpin, C.T.; Coelho, L.C.; Darvish, M. An improved model and exact algorithm using local branching for the inventory-routing problem with time windows. Int. J. Prod. Res. 2023, 61, 49–64. [Google Scholar] [CrossRef]
- Holmberg, K.; Yuan, D. A Lagrangian heuristic based branch-and-bound approach for the capacitated network design problem. Oper. Res. 2000, 48, 461–481. [Google Scholar] [CrossRef]
- Lee, D.H.; Dong, M. A heuristic approach to logistics network design for end-of-lease computer products recovery. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 455–474. [Google Scholar] [CrossRef]
- Topaloglu, H. Using Lagrangian relaxation to compute capacity-dependent bid prices in network revenue management. Oper. Res. 2009, 57, 637–649. [Google Scholar] [CrossRef]
- Takriti, S.; Birge, J.R. Lagrangian solution techniques and bounds for loosely coupled mixed-integer stochastic programs. Oper. Res. 2000, 48, 91–98. [Google Scholar] [CrossRef]
- Solomon, M.M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Solomon, M.; Desrosiers, J. Time window constrained routing and scheduling problems: A survey. Transp. Sci. 1988, 22, 1–11. [Google Scholar] [CrossRef]
- Righini, G.; Salani, M. Symmetry helps: Bounded bidirectional dynamic-programming for the elementary shortest path problem with resource constraints. Discrete Optim. 2006, 3, 255–273. [Google Scholar] [CrossRef]
- Righini, G.; Salani, M. New dynamic programming algorithms for the resource constrained elementary shortest path problem. Networks 2008, 51, 155–170. [Google Scholar] [CrossRef]
- Barahona, F.; Anbil, R. The volume algorithm: Producing primal solutions with a subgradient method. Math. Program. 2000, 87, 385–399. [Google Scholar] [CrossRef]
- Bahiense, L.; Maculan, N.; Sagastizábal, C. The volume algorithm revisited: Relation with bundle methods. Math. Program. 2002, 94, 41–70. [Google Scholar] [CrossRef]
- Frangioni, A.; Gendron, B.; Gorgone, E. On the computational efficiency of subgradient methods: A case study with Lagrangian bounds. Math. Prog. Comp. 2017, 9, 1–32. [Google Scholar] [CrossRef]
- Glover, F.; Laguna, M. Tabu Search; Kluwer Academic Publishers: Boston, MA, USA, 1997. [Google Scholar]
- Berbeglia, G.; Cordeau, J.F.; Laporte, G. A hybrid tabu search and constraint programming algorithm for the dynamic dial-a-ride problem. INFORMS J. Comput. 2012, 24, 343–355. [Google Scholar] [CrossRef]
- Gendreau, M.; Hertz, A.; Laporte, G. A tabu search heuristic for the vehicle routing problem. Manag. Sci. 1994, 40, 1276–1290. [Google Scholar] [CrossRef]
- Archetti, C.; Bouchard, M.; Desaulniers, G. Enhanced branch and price and cut for vehicle routing with split deliveries and time windows. Transp. Sci. 2011, 45, 285–298. [Google Scholar] [CrossRef]
- Schwerdfeger, S.; Walter, R. Improved algorithms to minimize workload balancing criteria on identical parallel machines. Comput. Oper. Res. 2018, 93, 123–134. [Google Scholar] [CrossRef]
- Ouazene, Y.; Yalaoui, F.; Chehade, H.; Yalaoui, A. Workload balancing in identical parallel machine scheduling using a mathematical programming method. Int. J. Comput. Intell. Syst. 2014, 7, 58–67. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sets | |
|---|---|
| Set of depots, each of which corresponds to a customer’s location. | |
| Set of n service requests (customers), each of which corresponds to the location of a customer. | |
| Set of arcs with and being the dummy vertexes of depot . | |
| Set of technicians living close to depot . | |
| Set of different areas of skill of each technician. | |
| Set of different levels of proficiency associated with each skill area. | |
| Group set composed of all possible combinations of the technicians belonging to depot . | |
| Parameters | |
| Number of technicians qualified with proficiency of skill in depot . | |
| Number of technicians in each technician group. | |
| C | Closing time of the depot. |
| Time interval of the lunch break with a duration of . | |
| STW of customer . | |
| Binary parameter equal to 1 if and only if customer needs a technician with at least | |
| a level of proficiency in skill area . | |
| Binary parameter equal to 1 if and only if technician is qualified with a | |
| level of proficiency in skill area . | |
| Nonnegative parameter denoting the unit STW violation cost at customer . | |
| Outsourcing cost of customer . | |
| Travel cost associated with arc . | |
| Travel time along arc . | |
| Service time associated with customer . | |
| Variables | |
| 1 if technician group traverses arc ; 0 otherwise. | |
| 1 if technician belongs to technician group in the optimal solution; 0 otherwise. | |
| 1 if technician group takes a break before the service at customer and after | |
| the departure from its predecessor in the route of technician group ; 0 otherwise. | |
| Service start time at customer of technician group . | |
| Start time of the lunch break of technician group . | |
| Delay of the service at customer of technician group with respect to . | |
| Without Tabu | With Tabu | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| n | Group | No. Inst | Avg. Gap | Avg. Time | No.1% Gap | Avg. Gap | Avg. Time | No.1% Gap | DT-Gap | DT-Time | DT-No.1 |
| 50 | R1 | 12 | 5.01 | 1154.32 | 5 | 2.18 | 967.66 | 9 | 56.49 | 16.17 | 80.00 |
| C1 | 9 | 5.35 | 973.33 | 5 | 4.04 | 1012.93 | 5 | 24.49 | −4.07 | 0.00 | |
| RC1 | 8 | 7.79 | 928.25 | 2 | 4.49 | 996.72 | 4 | 42.36 | −7.38 | 100.00 | |
| R2 | 11 | 5.68 | 1480.13 | 4 | 2.89 | 1263.61 | 7 | 49.12 | 14.63 | 75.00 | |
| C2 | 8 | 5.59 | 1718.62 | 3 | 3.24 | 1501.21 | 4 | 42.04 | 12.65 | 33.33 | |
| RC2 | 8 | 5.57 | 1806.60 | 1 | 3.15 | 1562.48 | 4 | 43.45 | 13.51 | 300.00 | |
| Total/Weighted average | 5.76 | 1330.73 | 20 | 3.24 | 1198.42 | 33 | 43.75 | 9.94 | 65.00 | ||
| 60 | R1 | 12 | 9.35 | 1675.21 | 1 | 4.32 | 1584.57 | 4 | 53.80 | 5.41 | 200.00 |
| C1 | 9 | 8.78 | 1829.32 | 1 | 5.15 | 1673.01 | 3 | 41.34 | 8.54 | 100.00 | |
| RC1 | 8 | 9.22 | 2223.12 | 0 | 5.89 | 1842.68 | 3 | 36.11 | 17.11 | - | |
| R2 | 11 | 8.69 | 2802.87 | 0 | 4.22 | 2395.97 | 4 | 51.43 | 14.52 | - | |
| C2 | 8 | 10.32 | 2653.79 | 1 | 5.24 | 2794.73 | 2 | 49.22 | −5.31 | 100.00 | |
| RC2 | 8 | 8.43 | 3165.47 | 0 | 4.31 | 2938.70 | 3 | 48.87 | 7.16 | - | |
| Total/Weighted average | 9.12 | 2352.45 | 3 | 4.79 | 2161.37 | 19 | 47.48 | 8.13 | 533.33 | ||
| CPLEX | Algorithm LBH | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| n | Group | No. Inst | Avg. Gap | Avg. Time | No.1% Gap | Avg.LGap | Avg. Gap | Avg. Time | No.1% Gap | DT-Gap | DT-Time |
| 50 | R1 | 12 | 0.02 | 398.47 | 11 | −0.18 | 2.18 | 967.66 | 9 | 99.08 | −58.82 |
| C1 | 9 | 0.00 | 403.26 | 9 | −0.24 | 4.04 | 1012.93 | 5 | 100.00 | −60.18 | |
| RC1 | 8 | 0.11 | 202.00 | 7 | −0.49 | 4.49 | 996.72 | 4 | 97.55 | −79.73 | |
| R2 | 11 | 0.23 | 1098.85 | 10 | −0.89 | 2.89 | 1263.61 | 7 | 92.04 | −13.03 | |
| C2 | 8 | 0.46 | 783.12 | 6 | −1.24 | 3.24 | 1501.21 | 4 | 85.80 | −47.83 | |
| RC2 | 8 | 0.35 | 652.27 | 6 | −1.15 | 3.15 | 1562.48 | 4 | 88.89 | −58.25 | |
| Total/Weighted average | 0.18 | 599.95 | 49 | −0.66 | 3.24 | 1198.42 | 33 | 94.44 | −49.93 | ||
| 60 | R1 | 12 | 1.15 | 1951.70 | 8 | 0.35 | 4.32 | 1584.57 | 4 | 73.38 | 23.16 |
| C1 | 9 | 1.53 | 2492.17 | 6 | 0.07 | 5.15 | 1673.01 | 3 | 70.29 | 48.96 | |
| RC1 | 8 | 1.41 | 3032.10 | 5 | 0.12 | 5.89 | 1842.68 | 3 | 76.06 | 64.54 | |
| R2 | 11 | 0.98 | 2573.21 | 7 | 0.33 | 4.22 | 2395.97 | 4 | 76.78 | 7.39 | |
| C2 | 8 | 1.35 | 2982.59 | 4 | −0.16 | 5.24 | 2794.73 | 2 | 74.24 | 6.72 | |
| RC2 | 8 | 1.96 | 3375.38 | 4 | −0.09 | 4.31 | 2938.70 | 3 | 54.52 | 14.85 | |
| Total/Weighted average | 1.36 | 2665.64 | 34 | 0.13 | 4.79 | 2161.37 | 19 | 71.61 | 23.33 | ||
| 70 | R1 | 12 | 3.55 | 7100.75 | 2 | 2.67 | 2.43 | 2576.51 | 8 | −46.09 | 175.59 |
| C1 | 9 | 4.83 | 6455.67 | 3 | 2.31 | 3.52 | 3348.30 | 6 | −37.22 | 92.80 | |
| RC1 | 8 | 4.35 | 5966.12 | 2 | 3.46 | 3.80 | 3675.16 | 5 | −14.47 | 62.33 | |
| R2 | 11 | 5.09 | 7035.27 | 1 | 2.65 | 2.30 | 2913.52 | 9 | −121.30 | 141.46 | |
| C2 | 8 | 4.98 | 6818.25 | 2 | 2.33 | 4.36 | 3442.96 | 4 | −14.22 | 98.03 | |
| RC2 | 8 | 6.12 | 7200.00 | 0 | 2.90 | 2.88 | 3956.29 | 5 | −112.50 | 81.98 | |
| Total/Weighted average | 4.64 | 6795.95 | 10 | 2.71 | 3.12 | 3244.59 | 37 | −52.05 | 109.45 | ||
| 80 | R1 | 12 | 9.17 | 10,800.00 | 0 | 3.02 | 3.09 | 5756.66 | 6 | −196.76 | 87.60 |
| C1 | 9 | 12.38 | 10,800.00 | 0 | 3.81 | 3.24 | 6048.72 | 5 | −282.09 | 78.55 | |
| RC1 | 8 | 16.80 | 10,800.00 | 0 | 3.48 | 4.49 | 6468.72 | 3 | −274.16 | 66.95 | |
| R2 | 11 | 11.11 | 10,800.00 | 0 | 3.78 | 4.02 | 6003.66 | 7 | −176.36 | 79.89 | |
| C2 | 8 | 13.17 | 10,800.00 | 0 | 3.06 | 3.71 | 5442.96 | 5 | −254.98 | 98.42 | |
| RC2 | 8 | 14.73 | 10,800.00 | 0 | 3.23 | 4.58 | 7621.31 | 4 | −221.61 | 41.70 | |
| Total/Weighted average | 12.52 | 10,800.00 | 0 | 3.40 | 3.80 | 6175.40 | 30 | −229.47 | 74.89 | ||
| 90 | R1 | 12 | - | - | - | 3.60 | 3.18 | 9250.43 | 7 | ||
| C1 | 9 | - | - | - | 4.07 | 4.16 | 11,097.18 | 5 | |||
| RC1 | 8 | - | - | - | 3.18 | 4.22 | 10,667.60 | 4 | |||
| R2 | 11 | - | - | - | 3.42 | 3.27 | 10,412.88 | 6 | |||
| C2 | 8 | - | - | - | 3.17 | 4.24 | 11,089.12 | 4 | |||
| RC2 | 8 | - | - | - | 4.79 | 4.04 | 12,462.54 | 3 | |||
| Total/Weighted average | - | - | - | 3.69 | 3.78 | 10,699.56 | 29 | ||||
| 100 | R1 | 12 | - | - | - | 4.17 | 4.24 | 13,577.78 | 3 | ||
| C1 | 9 | - | - | - | 5.12 | 4.88 | 15,516.60 | 3 | |||
| RC1 | 8 | - | - | - | 4.61 | 5.02 | 16,590.84 | 2 | |||
| R2 | 11 | - | - | - | 4.21 | 5.12 | 16,066.54 | 2 | |||
| C2 | 8 | - | - | - | 4.79 | 5.98 | 15,909.50 | 2 | |||
| RC2 | 8 | - | - | - | 5.06 | 5.33 | 17,942.38 | 1 | |||
| Total/Weighted average | - | - | - | 4.61 | 5.03 | 15,765.29 | 13 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, F.; Qiu, H.; Han, D. Lagrangian Heuristic for Multi-Depot Technician Planning of Product Distribution and Installation with a Lunch Break. Mathematics 2023, 11, 510. https://doi.org/10.3390/math11030510
Yan F, Qiu H, Han D. Lagrangian Heuristic for Multi-Depot Technician Planning of Product Distribution and Installation with a Lunch Break. Mathematics. 2023; 11(3):510. https://doi.org/10.3390/math11030510
Chicago/Turabian StyleYan, Fangzhou, Huaxin Qiu, and Dongya Han. 2023. "Lagrangian Heuristic for Multi-Depot Technician Planning of Product Distribution and Installation with a Lunch Break" Mathematics 11, no. 3: 510. https://doi.org/10.3390/math11030510
APA StyleYan, F., Qiu, H., & Han, D. (2023). Lagrangian Heuristic for Multi-Depot Technician Planning of Product Distribution and Installation with a Lunch Break. Mathematics, 11(3), 510. https://doi.org/10.3390/math11030510