
Modeling and Control of a DC-DC Buck–Boost Converter with Non-Linear Power Inductor Operating in Saturation Region Considering Electrical Losses

 ,
,  , , and
, , and
Abstract
:1. Introduction
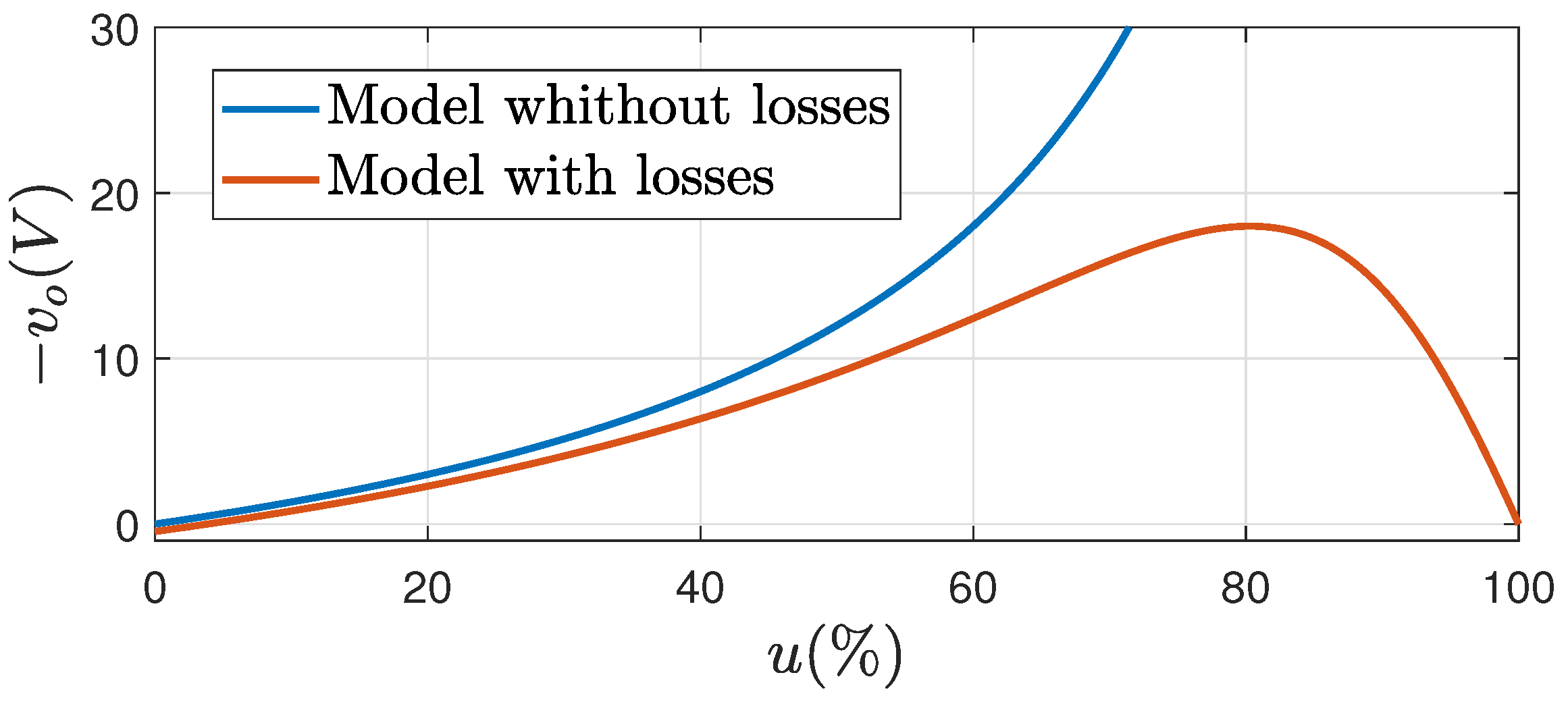
- This study introduces a mathematical model to simulate magnetic saturation effects and electrical losses in a power inductor operating in a buck–boost DC-DC converter. The model integrates a nonlinear arc-tangent-based inductor model with a converter model accounting for electrical losses. The Euler–Lagrange formalism is used for coupling those effects.
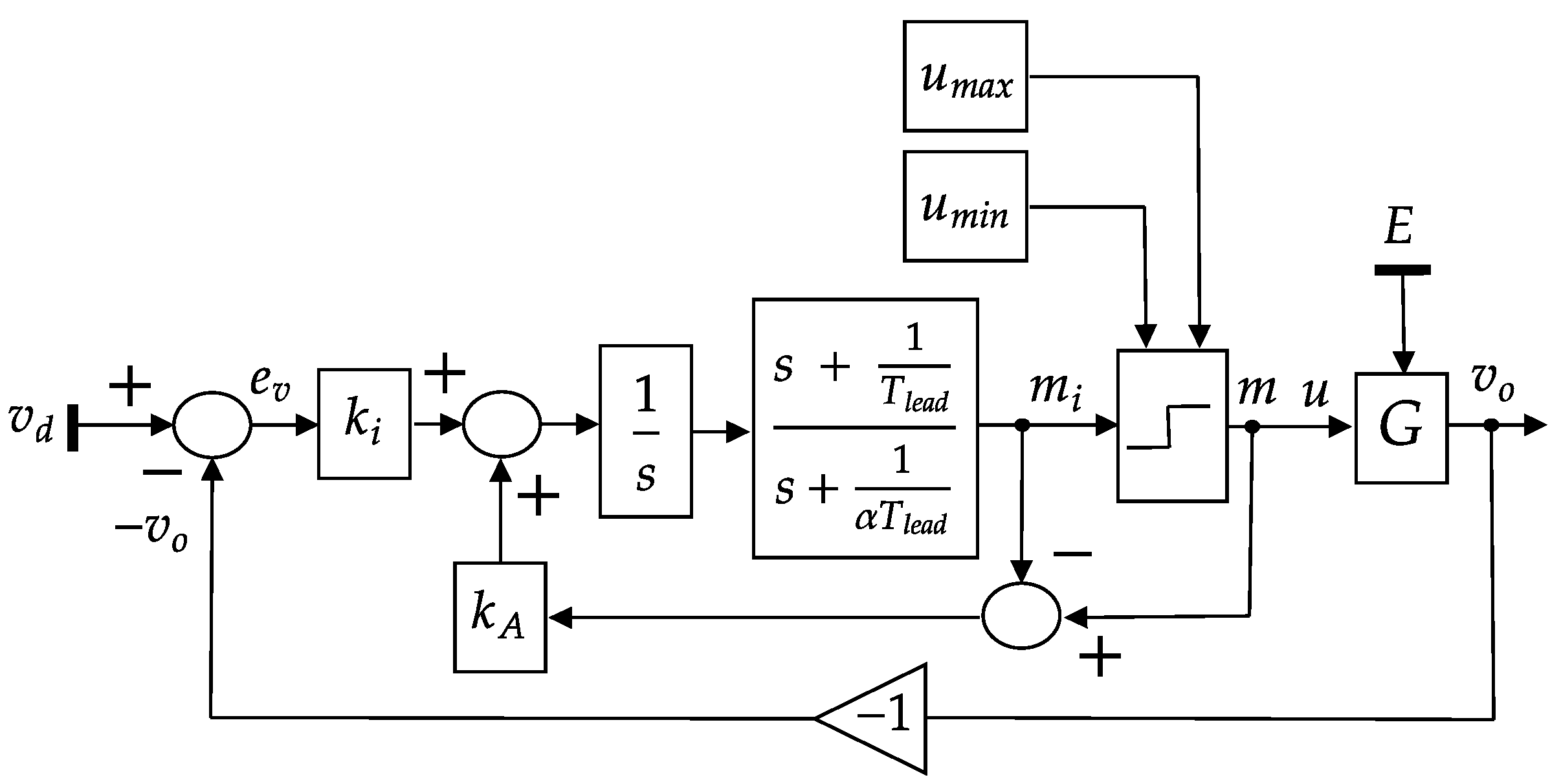
- The study suggests a simple but effective linear control strategy for voltage regulation in the converter. This method employs a standard integral controller with a lead-compensator action, combined with an anti-windup mechanism. The parameters for the anti-windup scheme are determined based on the mathematical model, specifically considering the converter behavior during steady-state operation.
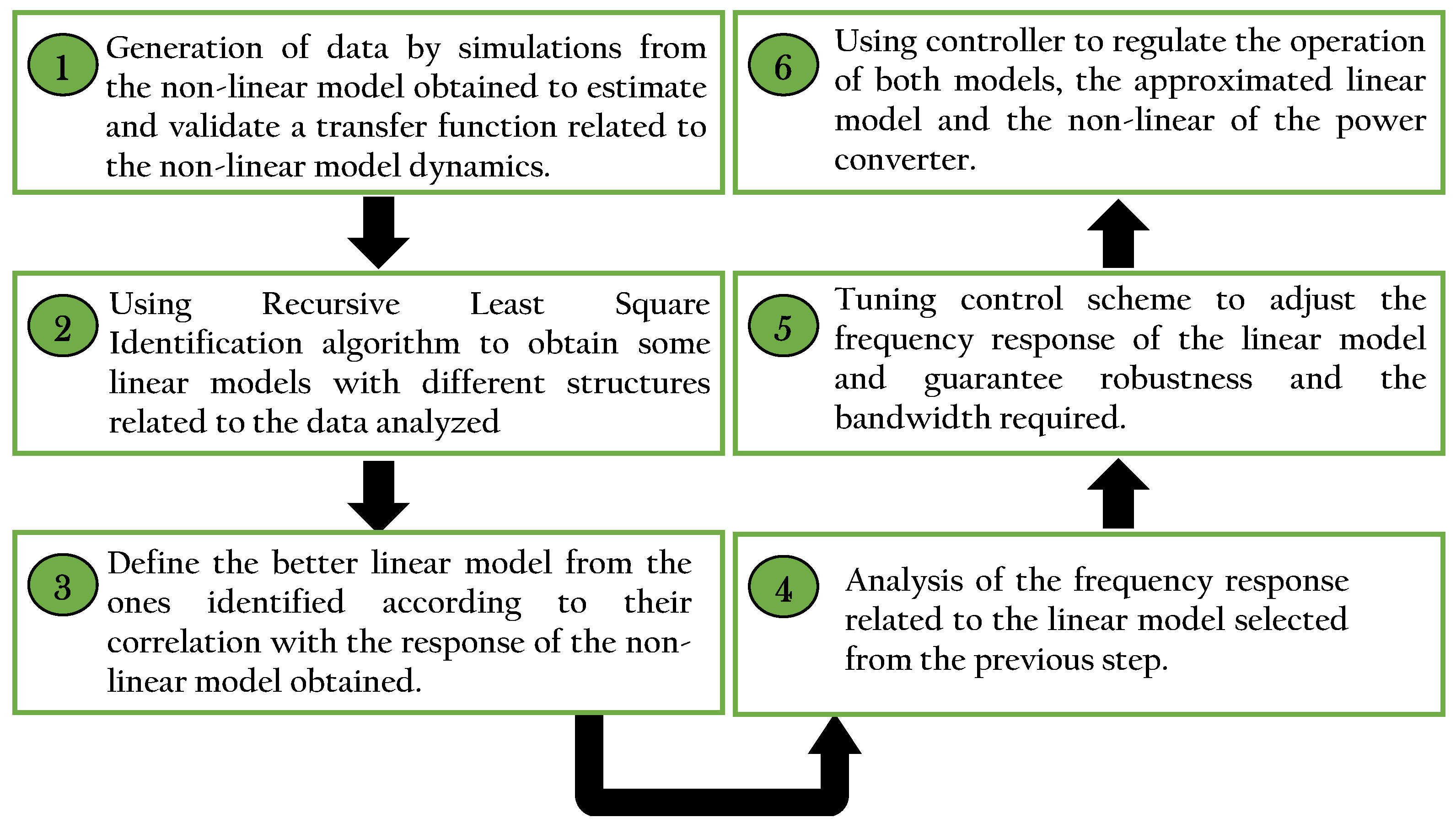
- The article introduces a comprehensive tuning procedure consisting of two primary stages. Firstly, a linearization of the non-linear model is achieved through an identification algorithm, aligning with the structure of its state–space representation. Subsequently, the generated linear model is employed to fine-tune control scheme parameters using frequency response analysis, ensuring both the stability and robustness of the controlled device.
2. Problem Formulation
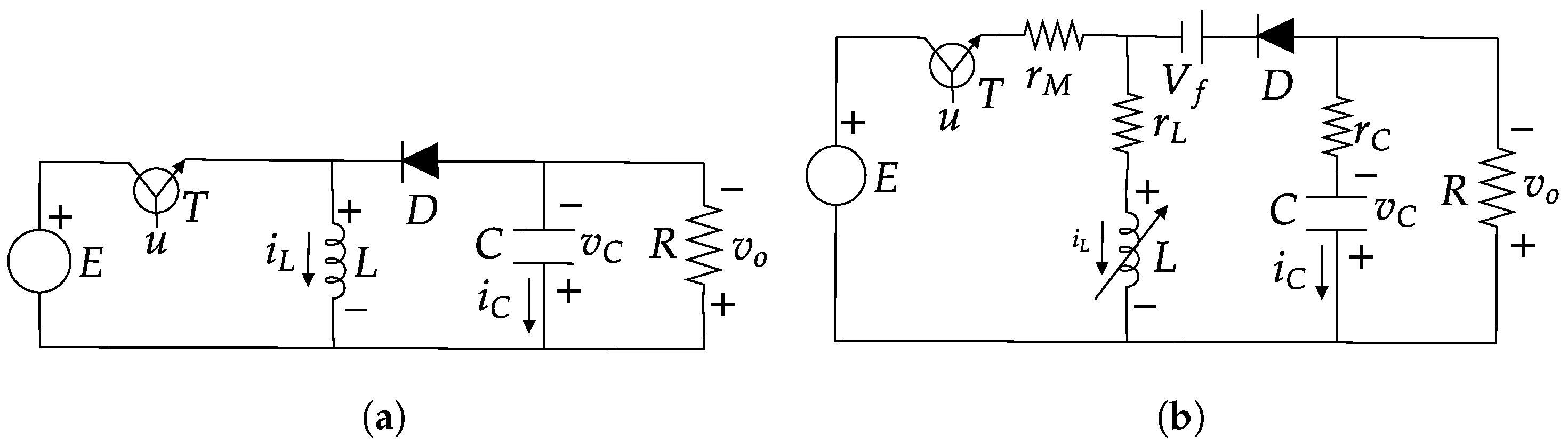
3. Modeling and Control of an Ideal DC-DC Buck–Boost Converter
3.1. Mathematical Model of an Ideal DC-DC Buck–Boost Power Converter
3.2. Proposed Controller Scheme
3.3. Methodology for Tuning the Linear Controller
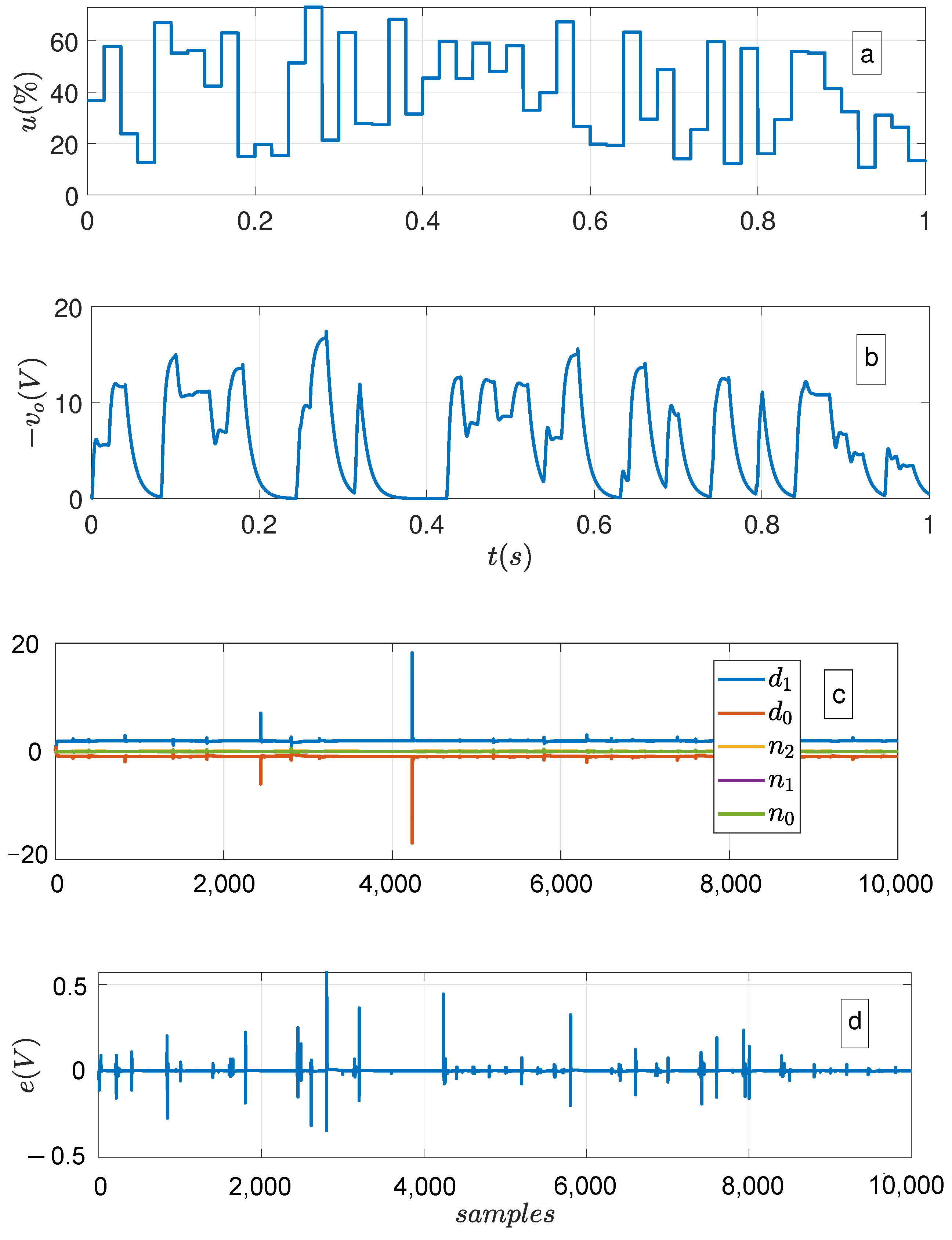
3.4. Recursive Least-Square Identification Algorithm
- The number of poles and zeros of the function to be modeled are already known. Then, the structure of and must be similar.
- is a persistent excitation signal.
- and must be bounded.
4. Non-Linear Inductance Model
- : The horizontal asymptote parameter related to the maximum inductance value when operated on the weak saturation region. This parameter is equal to the nominal inductance value provided by its manufacturer.
- : The horizontal asymptote parameter related to the minimum inductance value when operated on the deep saturation region. This parameter is obtained from the data provided by the inductor manufacturer.
- : This factor represents the roll-off region behavior between both defined saturation regions.
- : This parameter is the current when the element inductance is equal to the average value between and .
5. Non-Ideal DC-DC Buck–Boost Power Converter Proposed Model
6. Results and Analysis
6.1. Nominal Values of the Power Converter Components
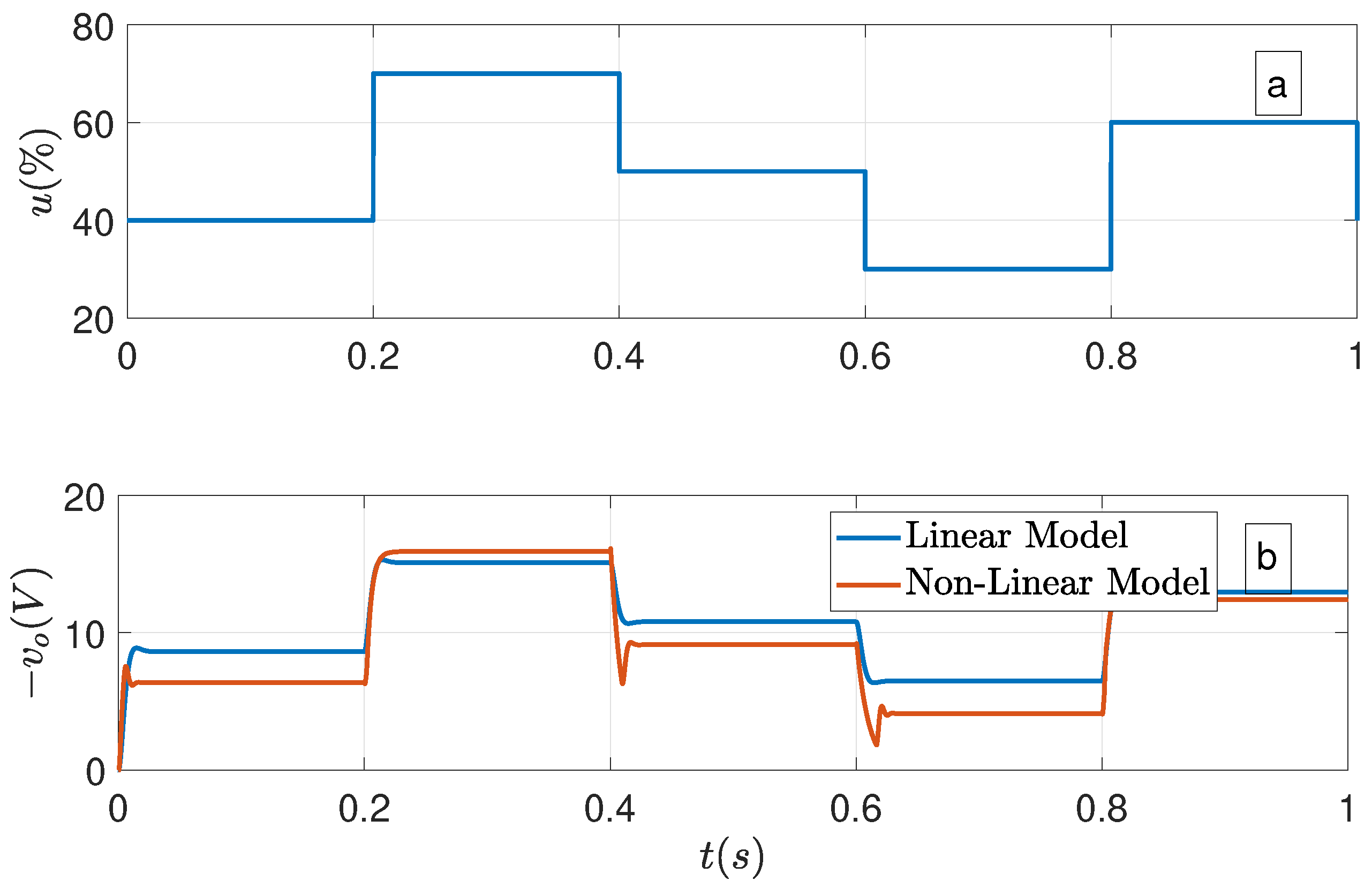
6.2. Analysis of the Ideal and Non-Ideal Models in Static-State Operation
6.3. Identification of the Approximated Linear Model
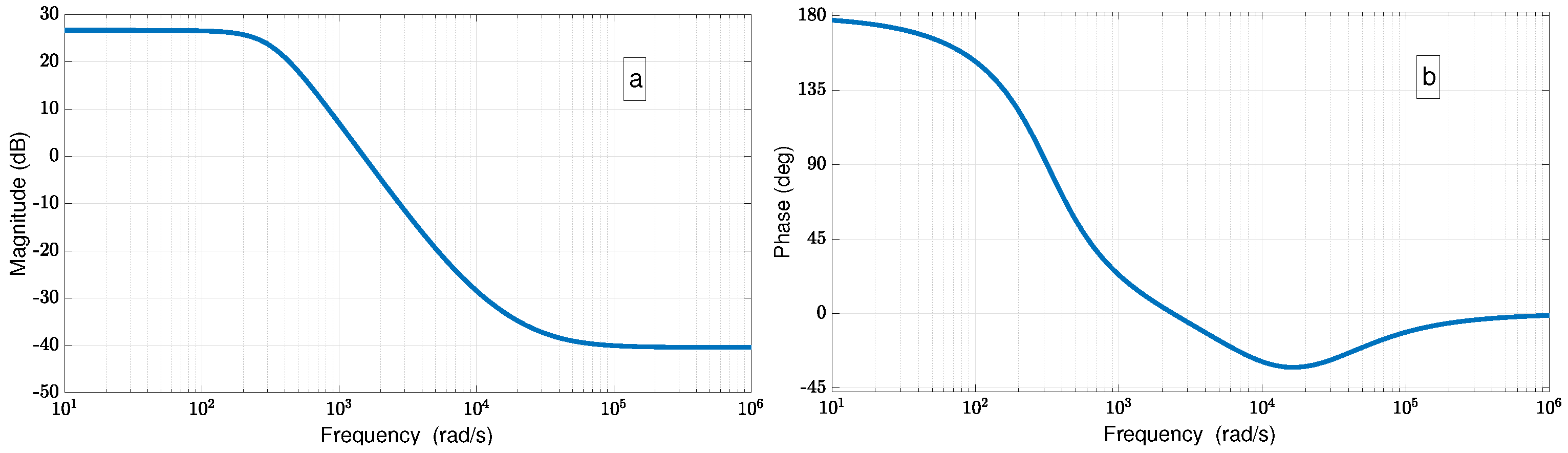
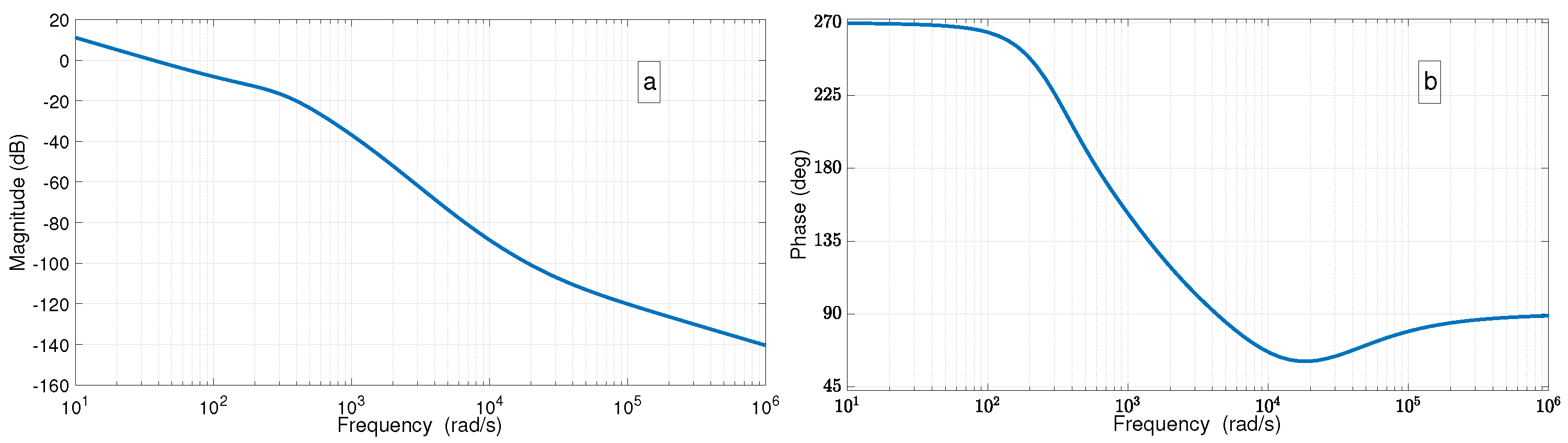
6.4. Controller Scheme Tuning
7. Comparison of Results with Other Control Strategies
7.1. PBC Controller
7.2. Non-Linear PI Controller
7.3. Comparison of Results
7.3.1. Variations on Reference Voltage
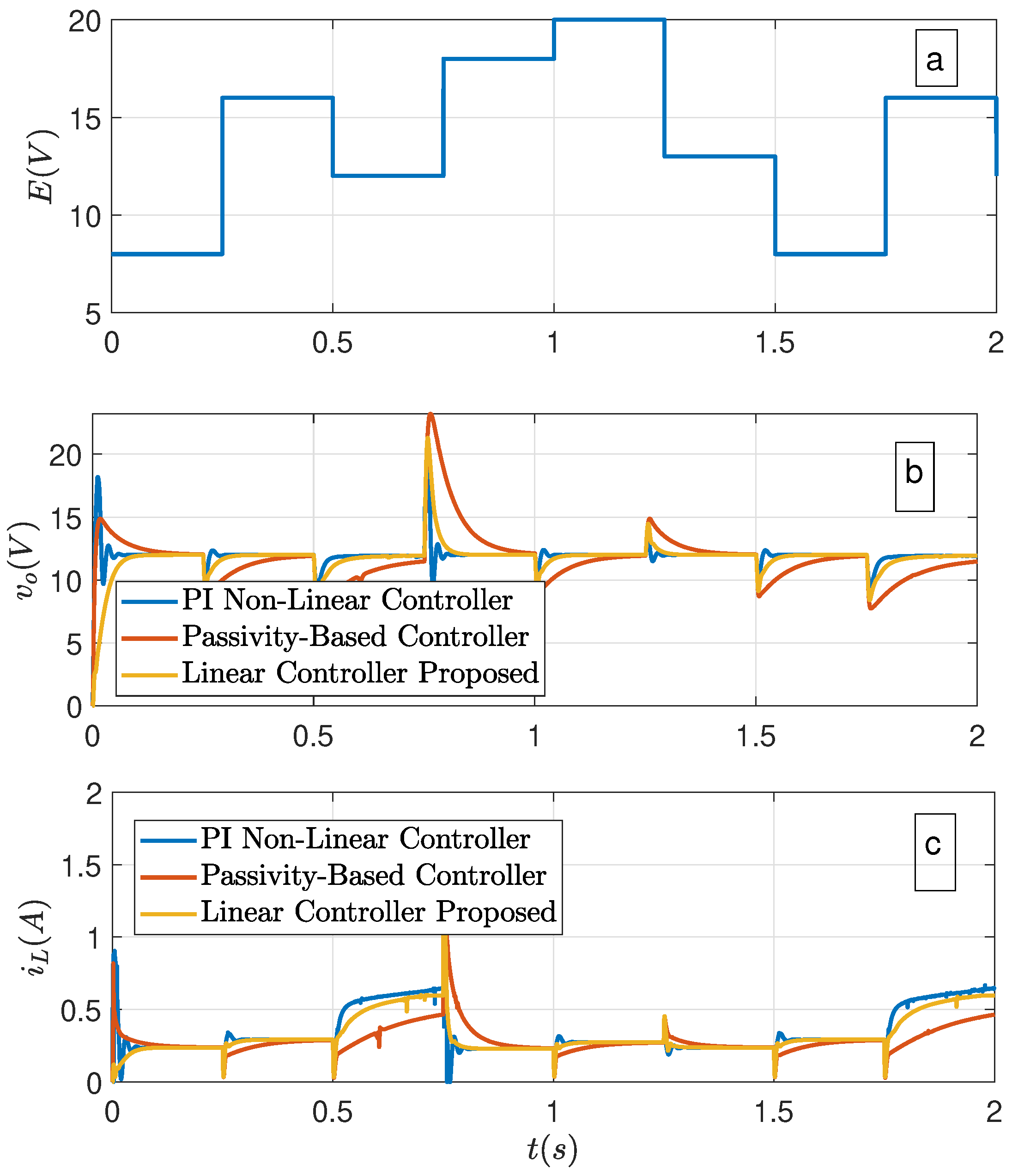
7.3.2. Variations on Supplied Voltage
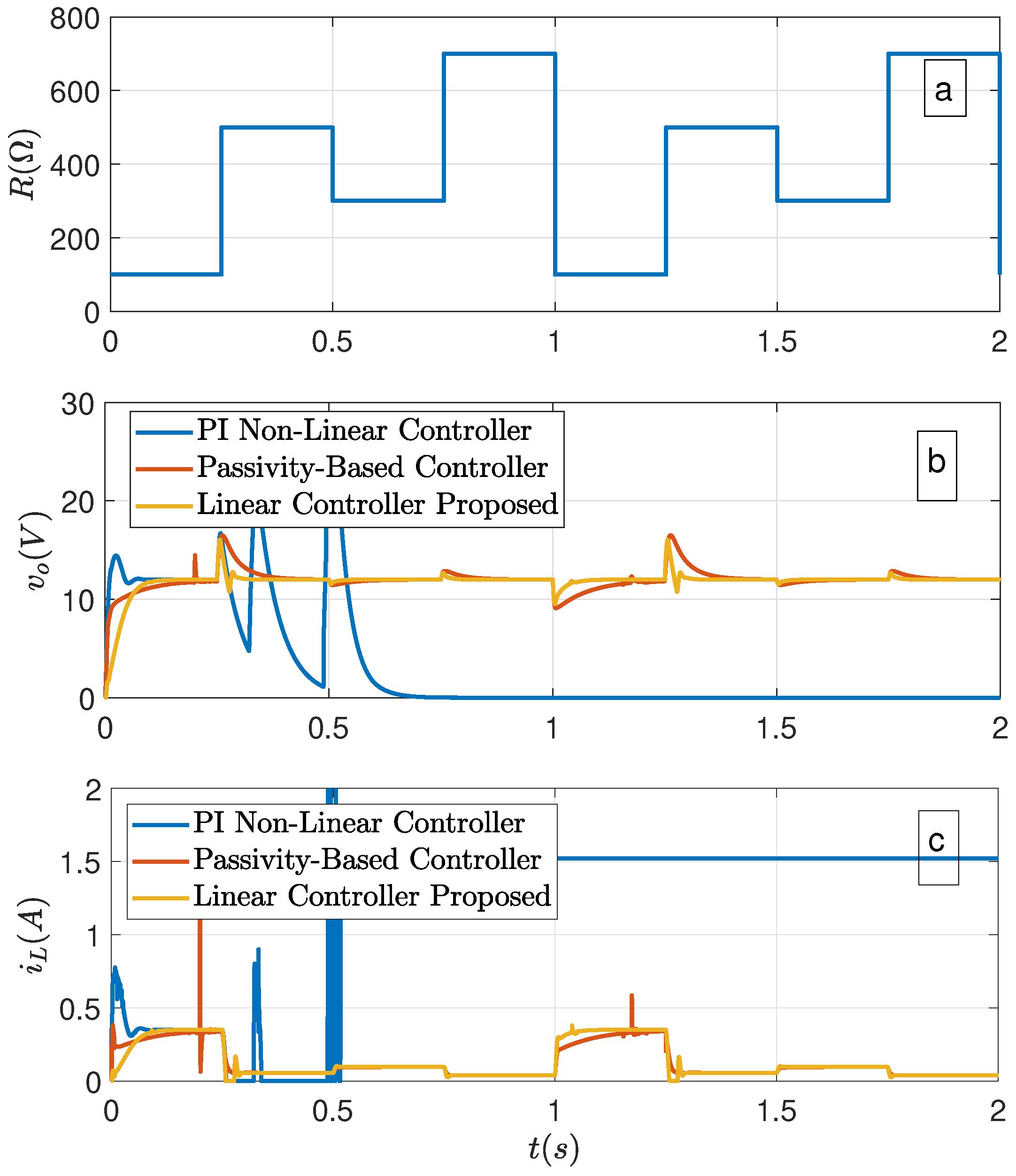
7.3.3. Variations on Load
7.4. Summary of the Results
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SISO | Simple-input simple-output |
| MIMO | Multiple-input multiple-output |
| DC | Direct current |
| LED | Light-emitter diode |
| CCM | Continuous control mode |
| DCM | Discontinuous control mode |
| PBC | Passivity-based control |
| PI | Proportional-integral |
| MPPT | Maximum power point tracking |
| NRDOB | Noise-reduction disturbance observer |
| BLDC | Brushless direct current |
| PV | Photovoltaic |
References
- Wilamowski, B.M.; Irwin, J.D. Power Electronics and Motor Drives; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Abdurraqeeb, A.M.; Al-Shamma’a, A.A.; Alkuhayli, A.; Noman, A.M.; Addoweesh, K.E. RST Digital Robust Control for DC/DC Buck Converter Feeding Constant Power Load. Mathematics 2022, 10, 1782. [Google Scholar] [CrossRef]
- Ortega, R.; Perez, J.A.L.; Nicklasson, P.J.; Sira-Ramirez, H.J. Passivity-Based Control of Euler–Lagrange Systems: Mechanical, Electrical and Electromechanical Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Xie, L.; Shi, J.; Yao, J.; Wan, D. Research on the Period-Doubling Bifurcation of Fractional-Order DCM Buck–Boost Converter Based on Predictor-Corrector Algorithm. Mathematics 2022, 10, 1993. [Google Scholar] [CrossRef]
- Riffo, S.; Gil-González, W.; Montoya, O.D.; Restrepo, C.; Muñoz, J. Adaptive Sensorless PI+Passivity-Based Control of a Boost Converter Supplying an Unknown CPL. Mathematics 2022, 10, 4321. [Google Scholar] [CrossRef]
- Surya, S.; Williamson, S. Generalized Circuit Averaging Technique for Two-Switch PWM DC-DC Converters in CCM. Electronics 2021, 10, 392. [Google Scholar] [CrossRef]
- Nam, N.N.; Kim, S.H. Robust Tracking Control of Dual-Active-Bridge DC-DC Converters with Parameter Uncertainties and Input Saturation. Mathematics 2022, 10, 4719. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Perez-Moreno, R.; Ortega, R.; Garcia-Esteban, M. Passivity-based controllers for the stabilization of Dc-to-Dc Power converters. Automatica 1997, 33, 499–513. [Google Scholar] [CrossRef]
- Martinez-Lopez, M.J.; Moreno-Valenzuela, J.; He, W. A robust nonlinear PI-type controller for the DC–DC buck–boost power converter. ISA Trans. 2022, 129, 687–700. [Google Scholar] [CrossRef] [PubMed]
- Oliveri, A.; Lodi, M.; Storace, M. Nonlinear models of power inductors: A survey. Int. J. Circuit Theory Appl. 2022, 50, 2–34. [Google Scholar] [CrossRef]
- Kaiser, J.; Dürbaum, T. An Overview of Saturable Inductors: Applications to Power Supplies. IEEE Trans. Power Electron. 2021, 36, 10766–10775. [Google Scholar] [CrossRef]
- Di Capua, G.; Femia, N. A Novel Method to Predict the Real Operation of Ferrite Inductors With Moderate Saturation in Switching Power Supply Applications. IEEE Trans. Power Electron. 2016, 31, 2456–2464. [Google Scholar] [CrossRef]
- Wang, B.; Feng, H. The buck–boost converter adopting passivity-based adaptive control strategy and its application. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; Volume 3, pp. 1877–1882. [Google Scholar] [CrossRef]
- Lodi, M.; Oliveri, A.; Storace, M. Behavioral Models for Ferrite-Core Inductors in Switch-Mode DC-DC Power Supplies: A Survey. In Proceedings of the 2019 IEEE 5th International forum on Research and Technology for Society and Industry (RTSI), Florence, Italy, 9–12 September 2019; pp. 242–247. [Google Scholar] [CrossRef]
- Almawlawe, M.D.; Kovandzic, M. A Modified Method for Tuning PID Controller for buck–boost Converter. Int. J. Adv. Eng. Res. Sci. 2016, 3, 236938. [Google Scholar] [CrossRef]
- Vijayalakshmi, S.; Arthika, E.; Priya, G.S. Modeling and simulation of interleaved buck–boost converter with PID controller. In Proceedings of the 2015 IEEE 9th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 9–10 January 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Sanchez-Flores, J.A.; Gonzalez-Valdes, J.Y.; Liceaga-Castro, J.U.; Liceaga-Castro, E.; Amezquita-Brooks, L.A.; Garcia-Salazar, O.; Martinez-Vazquez, D.L. Experimental workbench for aircraft ram air micro-turbine generators. In Proceedings of the 2017 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 8–10 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Y. Research on the passivity-based control strategy of buck–boost converters with a wide input power supply range. In Proceedings of the 2nd International Symposium on Power Electronics for Distributed Generation Systems, Hefei, China, 16–18 June 2010; pp. 304–308. [Google Scholar] [CrossRef]
- Martinez-Lopez, M.J. Modelado y Control de Convertidores de Potencia; Tesis de grado, Instituto Politécnico Nacional: Mexico City, Mexico, 2021. [Google Scholar]
- Huba, M.; Chamraz, S.; Bistak, P.; Vrancic, D. Making the PI and PID Controller Tuning Inspired by Ziegler and Nichols Precise and Reliable. Sensors 2021, 21, 6157. [Google Scholar] [CrossRef] [PubMed]
- Zand, J.P.; Sabouri, J.; Katebi, J.; Nouri, M. A new time-domain robust anti-windup PID control scheme for vibration suppression of building structure. Eng. Struct. 2021, 244, 112819. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Volume 5. [Google Scholar]
- Liceaga-Castro, J.U.; Siller-Alcalá, I.I.; Alcántara-Ramírez, R. least-square Identification using Noise Reduction Disturbance Observer. Trans. Syst 2019, 18, 313–318. [Google Scholar]
- Jiménez-González, J. Identificación de Parámetros en Tiempo real de un Motor de CD de Imanes Permanentes sin Escobillas. Master’s Thesis, Universidad Autónoma Metropolitana (México), Unidad Azcapotzalco, Azcapotzalco, Mexico, 2021. [Google Scholar]
- Jimenez-Gonzalez, J.; Gonzalez-Montañez, F.; Jimenez-Mondragon, V.M.; Liceaga-Castro, J.U.; Escarela-Perez, R.; Olivares-Galvan, J.C. Parameter Identification of BLDC Motor Using Electromechanical Tests and Recursive Least-Squares Algorithm: Experimental Validation. Actuators 2021, 10, 143. [Google Scholar] [CrossRef]
- Landau, I.D.; Zito, G. Digital Control Systems: Design, Identification and Implementation; Springer: Berlin/Heidelberg, Germany, 2006; Volume 130. [Google Scholar]
- Sira-Ramirez, H.J.; Silva-Ortigoza, R. Control Design Techniques in Power Electronics Devices; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Liceaga-Castro, J.U.; Siller-Alcalá, I.I.; Liceaga-Castro, E.; Amézquita-Brooks, L.A. MIMO Passive Control Systems Are Not Necessarily Robust. J. Control Sci. Eng. 2016, 2015, 508102. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Measure Unit |
|---|---|---|
| (a) | ||
| 10 | mH | |
| 2 | mH | |
| 0.44 | A | |
| 0.37 | A | |
| 6.55 | ||
| (b) | ||
| 49 | A | |
| 94 | W | |
| 55 | V | |
| 4 | V | |
| 17.5 | m | |
| 12 | nS | |
| 44 | nS | |
| (c) | ||
| 0.48 | V | |
| 10 | A | |
| 60 | V | |
| 65 | mA | |
| (d) | ||
| C | 100 | F |
| R | 100 | |
| 31 | m |
| u | k | ||||
|---|---|---|---|---|---|
| 0.2 | 8.8552 × 10 | −3.2258 × 10 | 4.1379 × 10 | −384.27 + 754.79i | −384.27 − 754.79i |
| 0.4 | 8.8552 × 10 | −1.1672 × 10 | 1.0533 × 10 | −387.08 + 535.59i | −387.08 − 535.59i |
| 0.5 | 8.8552 × 10 | −2.0267 × 10 | 5.5972 × 10 | −393.43 + 418.61i | −393.43 − 418.61i |
| 0.6 | 8.8552 × 10 | −3.4670 × 10 | 3.1637 × 10 | −452.49 + 267.93i | −452.49 − 267.93i |
| 0.8 | 8.8552 × 10 | −1.0044 × 10 | 113.1119 | −3432.1 | −163.8523 |
| Parameter | Mean | Variance | Corrected Value |
|---|---|---|---|
| −1.9473 | 0.0348 | −1.9519 | |
| 0.9487 | 0.0342 | 0.9529 | |
| 0.0095 | 3.5856 × 10 | 0.0095 | |
| −0.0102 | 8.5356 × 10 | −0.0106 | |
| −0.0193 | 8.5191 × 10 | −0.0209 |
| Controller | Parameter | Value |
|---|---|---|
| Non-linear PI | 0.1 | |
| 0.2 | ||
| 0.1 | ||
| Adaptive PBC+PI | 0.01 | |
| 0.4 | ||
| 2 |
| Controller | Test 1 | Test 2 | Test 3 | Reference | |||
|---|---|---|---|---|---|---|---|
| Non-linear PI | ◼ | Not robust | ◼ | The fastest | ◼ | Not robust | [9] |
| Lyapunov-based | and robust | ||||||
| Passivity-based | ◼ | Robust | ◼ | The slowest | ◼ | Robust | [13] |
| and fast | and robust | and slow | |||||
| I + lead | ◼ | Robust | ◼ | Robust | ◼ | Robust | This article |
| compensation | and fast | and fast |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Santana, E.; Gonzalez-Montañez, F.; Liceaga-Castro, J.U.; Jimenez-Mondragon, V.M.; Siller-Alcala, I. Modeling and Control of a DC-DC Buck–Boost Converter with Non-Linear Power Inductor Operating in Saturation Region Considering Electrical Losses. Mathematics 2023, 11, 4617. https://doi.org/10.3390/math11224617
Molina-Santana E, Gonzalez-Montañez F, Liceaga-Castro JU, Jimenez-Mondragon VM, Siller-Alcala I. Modeling and Control of a DC-DC Buck–Boost Converter with Non-Linear Power Inductor Operating in Saturation Region Considering Electrical Losses. Mathematics. 2023; 11(22):4617. https://doi.org/10.3390/math11224617
Chicago/Turabian StyleMolina-Santana, Ernesto, Felipe Gonzalez-Montañez, Jesus Ulises Liceaga-Castro, Victor Manuel Jimenez-Mondragon, and Irma Siller-Alcala. 2023. "Modeling and Control of a DC-DC Buck–Boost Converter with Non-Linear Power Inductor Operating in Saturation Region Considering Electrical Losses" Mathematics 11, no. 22: 4617. https://doi.org/10.3390/math11224617
APA StyleMolina-Santana, E., Gonzalez-Montañez, F., Liceaga-Castro, J. U., Jimenez-Mondragon, V. M., & Siller-Alcala, I. (2023). Modeling and Control of a DC-DC Buck–Boost Converter with Non-Linear Power Inductor Operating in Saturation Region Considering Electrical Losses. Mathematics, 11(22), 4617. https://doi.org/10.3390/math11224617