

Robust Tracking as Constrained Optimization by Uncertain Dynamic Plant: Mirror Descent Method and ASG—Version of Integral Sliding Mode Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Brief Survey
- –
- The prediction process cannot be accomplished precisely since the right-hand side of the ODE, representing the object model, is considered to be unknown (only dimensions of states and control are available);
- –
- Because the control action should be implemented in real-time online utilizing feedback (but not open-loop control), it is difficult to test-repeat the appropriate produced trajectories for various potential uncertainties.
1.2. Main Contributions
- The robust tracking problem is reformulated as a constrained optimization realized by a dynamic plant with an unknown (but bounded) right-hand side. When we refer to “robust tracking”, we imply two distinct characteristics that are connected to imperfect a priori knowledge. While the exact control plant models and tracking trajectories are unavailable, a robust controller should nevertheless be able to successfully operate. It is just necessary to measure states and corresponding velocities online.
- The cost as well as the constraints are admitted to be convex but not obligatory strictly or strongly convex.
- The mirror descent method (MDM) and ASG version of sliding mode control are suggested and realized.
- The convergence of the obtained trajectories of the controlled uncertain plant to the corresponding admissible zone close to the minimal point is realized.
2. Uncertain Plant Description and Admitted Dynamic Zone
2.1. Dynamic Model
2.2. Reference Trajectory, Tracking Error Dynamics, and Admissible Zone
2.3. Basic Assumptions
- A1
- The current states of the plant (3) are supposed to be measurable (available) online for all .
- A2
- The function , satisfying (4), is piecewise continuous in all arguments and admits to being unknown.
- A3
- The current states of the reference trajectory are also supposed to be available online for any .
- A4
- Here we assume that the subgradient (Recall that a vector , satisfying the inequality + for all is called the subgradient of the function at the point and is denoted by , which is the set of all subgradients of F at the point x. If is differentiable at a point x, then . In the minimal point , we have .) of the loss function is available online for a current time , and the set of minimizers of on the set includes the origin ; that is,
- A5
- The admissible set is nonempty convex compact, i.e., .
3. Desired Dynamics
3.1. Mirror Descent Method in Continuous Time
3.2. Why the Dynamics Are Desired
4. Robust Controller Design
4.1. Auxiliary Sliding Variable and Its Dynamics
4.2. Robust Control Structure
4.3. Main Result
5. Discussion
6. Numerical Example
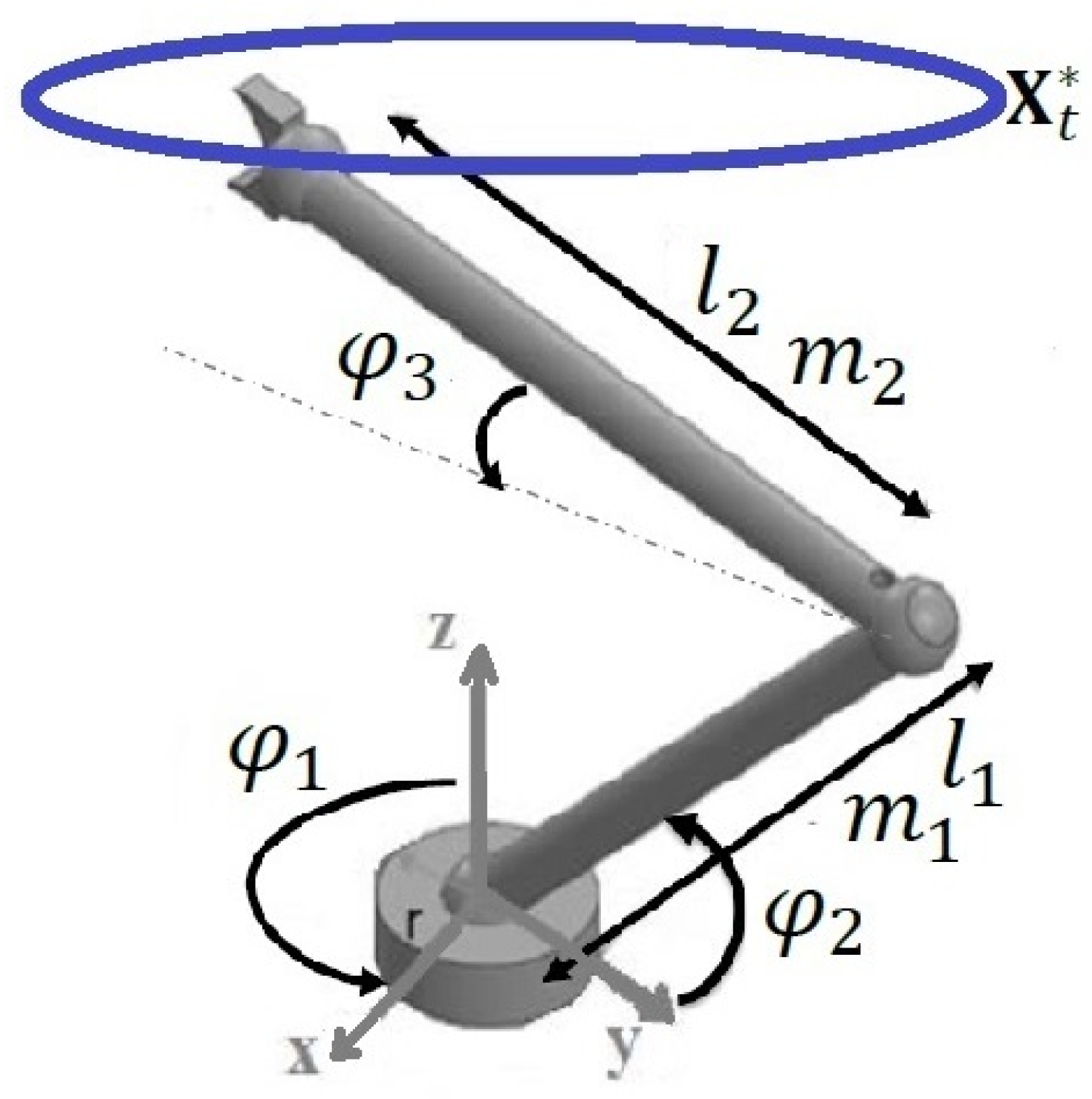
6.1. Model Description
6.2. Intended Moving Point
6.3. Relation between Cartesian and Angular Coordinates
6.4. Applied Robust Controller Structure
6.5. Parameters of Simulation
| Parameter | Numerical Value | Description |
| 1.1 | environmental (air) resistance | |
| g | 9.81 m/s | Gravitational acceleration |
| 1 kg | Mass | |
| 0.35 m, 0.67 m | Length |
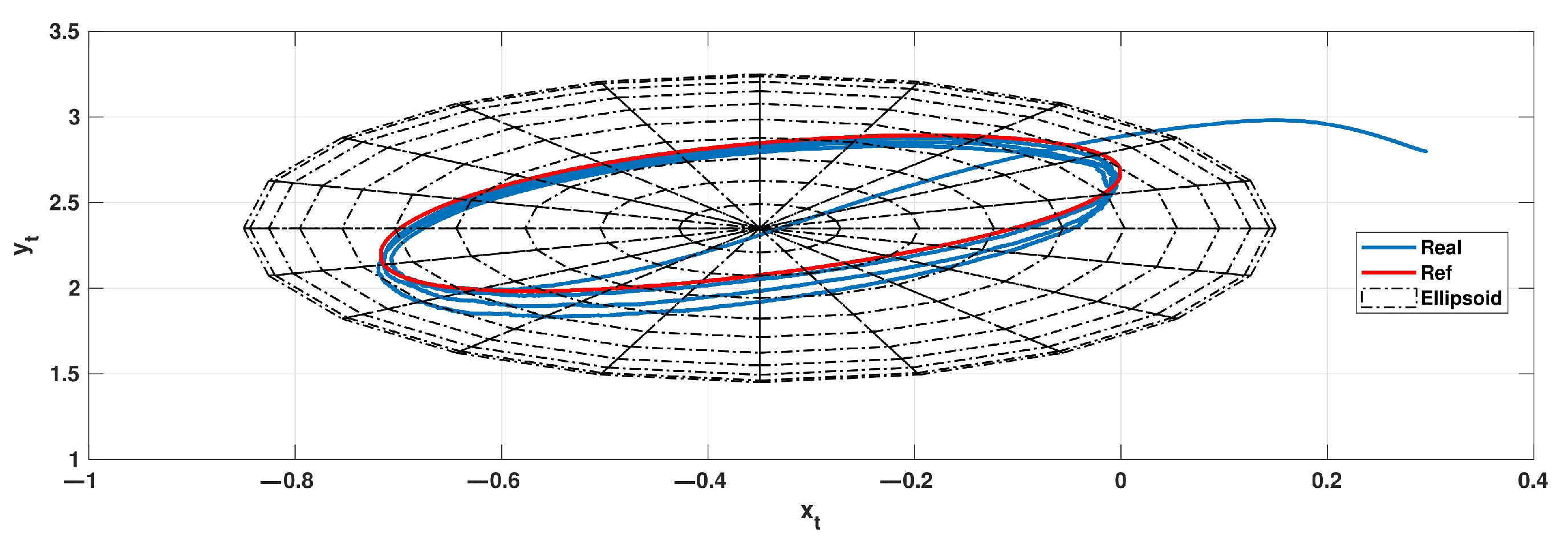
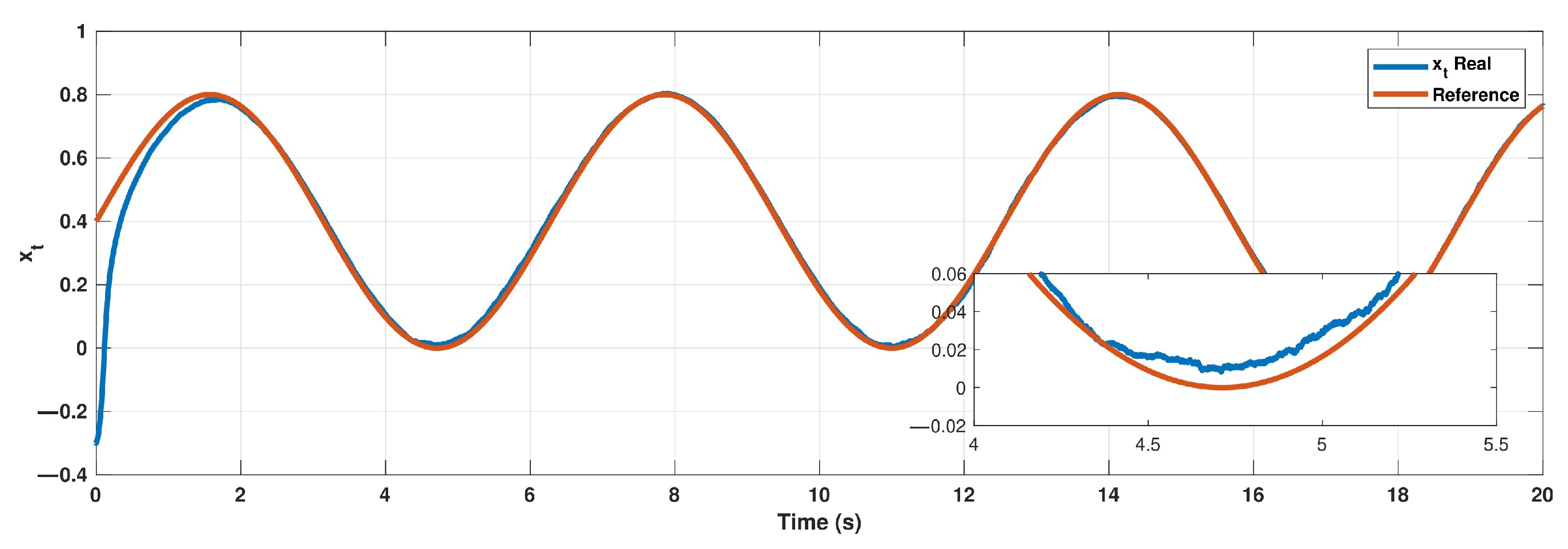
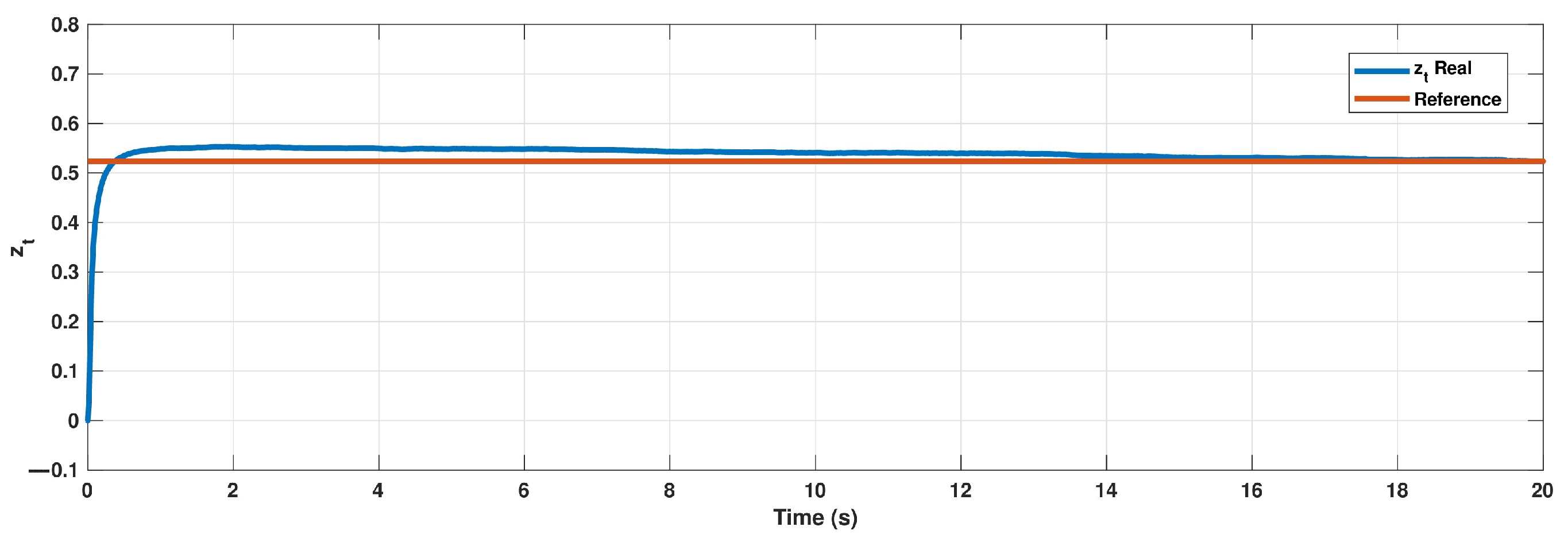
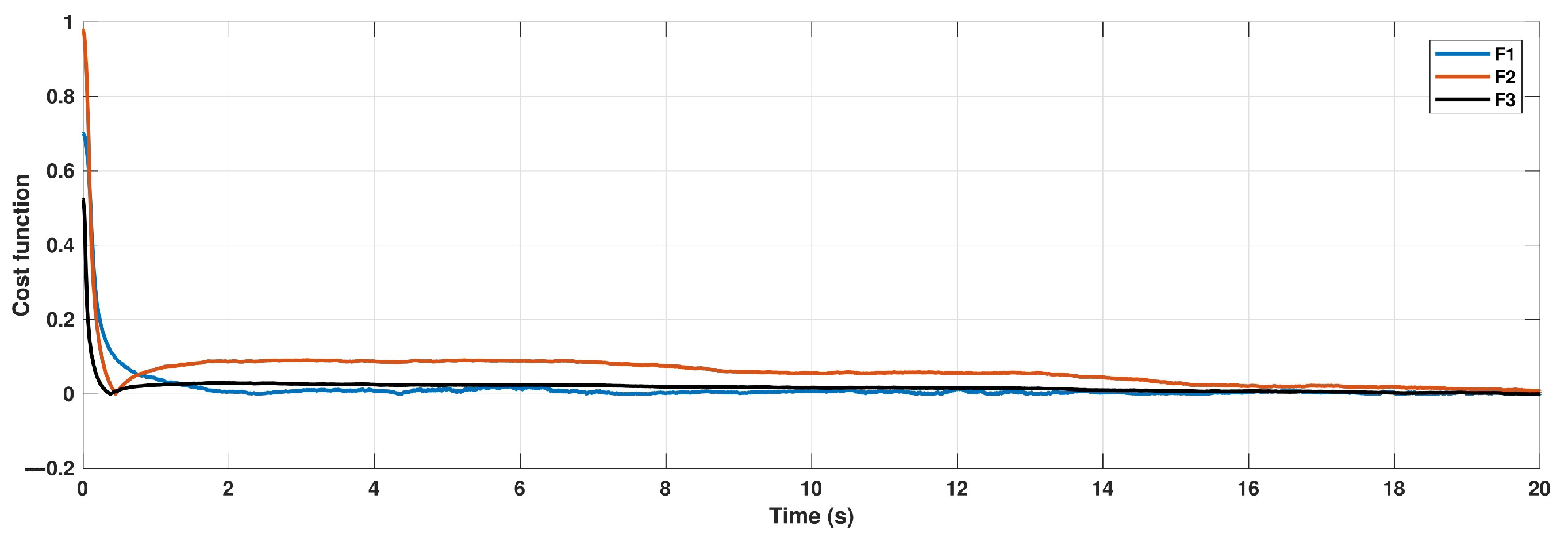
6.6. Results of Numerical Simulations
7. Conclusions
- -
- The constrained optimization problem is addressed in this study using a second-order differential controlled plant with an unknown (but bounded) right side of the model.
- -
- The desired dynamics in the tracking error variables is designed based on the mirror descent method.
- -
- The continuous time convergence to the set of minimizing points is established, and the associated rate of convergence is analytically evaluated.
- -
- The robust controller, containing both the continuous (compensating) and the discontinuous , is proposed using the ASG version of the integral sliding mode approach.
- -
- The suggested controller, under the special relations of it parameters with the initial conditions, is proved to provide the desired regime from the beginning of the control process.
- -
- This method may have several applications in the development of robust control in mechanical systems, including soft robotics and moving dynamic plants.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ASG | Average subgradient |
| SDM | Subgradient descent Method |
| ISM | Integral sliding mode |
| SOM | Static Optimization Methods |
| ODE | Ordinary differential equation |
References
- Bertsekas, D.P. Constrained Optimization and Lagrange Multiplier Methods; Academic Press: New York, NY, USA, 1982; ISBN 0-12-093480-9. [Google Scholar]
- Dechter, R. Constraint Processing; Morgan Kaufmann: Burlington, MA, USA, 2003; ISBN 1-55860-890-7. [Google Scholar]
- Leader, J.J. Numerical Analysis and Scientific Computation; Addison Wesley: Boston, MA, USA, 2003; ISBN 0-201-73499-0. [Google Scholar]
- Posser, M.; Posser, M.J. Basic Mathematics for Economists; Routledge: New York, NY, USA, 1993; ISBN 0-415-08424-5. [Google Scholar]
- Rossi, F.; van Beek, P.; Walsh, T. Chapter 1—Introduction. In Foundations of Artificial Intelligence: Handbook of Constraint Programming; Rossi, F., van Beek, P., Walsh, T., Eds.; Elsevier: Amsterdam, The Netherlands, 2006; Volume 2, pp. 3–12. [Google Scholar] [CrossRef]
- Sun, W.; Yua, Y.-X. Optimization Theory and Methods: Nonlinear Programming; Springer: New York, NY, USA, 2010; ISBN 978-1441937650. [Google Scholar]
- Rastrigin, L.A. Systems of Extremal Control; Nauka: Moscow, Russia, 1974. (In Russian) [Google Scholar]
- Krstic, M.; Wang, H.H. Stability of extremum seeking feedback for general nonlinear dynamic systems. Automatica 2000, 36, 595–601. [Google Scholar] [CrossRef]
- Ariyur, K.B.; Krstic, M. Real-Time Optimization by Extremum-Seeking Control; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Tan, Y.; Moase, W.H.; Manzie, C.; Nešić, D.; Mareels, I.M.Y. Extremum seeking from 1922 to 2010. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010; pp. 14–26. [Google Scholar]
- Tan, Y.; Nešić, D.; Mareels, I. On non-local stability properties of extremum seeking control. Automatica 2006, 42, 889–903. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Amrit, R. Optimizing process economic performance using model predictive control. In Nonlinear Model Predictive Control; Magni, L., Raimondo, D.M., Allgöwer, F., Eds.; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2009; Volume 384, pp. 119–138. [Google Scholar]
- Dehaan, D.; Guay, M. Extremum-seeking control of state-constrained nonlinear systems. Automatica 2005, 41, 1567–1574. [Google Scholar] [CrossRef]
- Chunlei, Z.; Ordóñez, R. Robust and adaptive design of numerical optimization-based extremum seeking control. Automatica 2009, 45, 634–646. [Google Scholar]
- Solis, C.U.; Clempner, J.B.; Poznyak, A.S. Extremum seeking by a dynamic plant using mixed integral sliding mode controller with synchronous detection gradient estimation. Int. J. Robust Nonlinear Control 2018, 29, 702–714. [Google Scholar] [CrossRef]
- Ferrara, A.; Utkin, V.I. Sliding Mode Optimization in Dynamic LTI Systems. J. Optim. Theory Appl. 2002, 115, 727–740. [Google Scholar] [CrossRef]
- Ferrara, A. A variable structure convex programming based control approach for a class of uncertain linear systems. Syst. Control Lett. 2005, 54, 529–538. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Robust model predictive control: A survey. In Robustness in Identification and Control; Garulli, A., Tesi, A., Eds.; Lecture Notes in Control and Information Sciences; Springer: London, UK, 1999; Volume 245, pp. 207–226. [Google Scholar] [CrossRef]
- Jalali, A.A.; Nadimi, V. A Survey on Robust Model Predictive Control from 1999–2006. In Proceedings of the 2006 International Conference on Computational Inteligence for Modelling Control and Automation and International Conference on Intelligent Agents Web Technologies and International Commerce (CIMCA’06), Sydney, NSW, Australia, 28 November–1 December 2006; p. 207. [Google Scholar] [CrossRef]
- Li, H.; Wang, S.; Shi, H.; Su, C.; Li, P. Two-Dimensional Iterative Learning Robust Asynchronous Switching Predictive Control for Multiphase Batch Processes with Time-Varying Delays. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 6488–6502. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, W.; Zhang, Q.; Shi, H.; Zhang, R.; Gao, F. Terminal constrained robust hybrid iterative learning model predictive control for complex time-delayed batch processes. Nonlinear Anal. Hybrid Syst. 2023, 47, 101276. [Google Scholar] [CrossRef]
- Liu, X.; Ma, L.; Kong, X.; Lee, K.Y. An efficient iterative learning predictive functional control for nonlinear batch processes. IEEE Trans. Cybern. 2020, 52, 4147–4160. [Google Scholar] [CrossRef] [PubMed]
- Shi, H.; Li, P.; Cao, J.; Su, C.; Yu, J. Robust fuzzy predictive control for discrete-time systems with interval time-varying delays and unknown disturbances. IEEE Trans. Fuzzy Syst. 2019, 28, 1504–1516. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W. Input/output analysis of primal-dual gradient algorithms. In Proceedings of the 54th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 27–30 September 2016; pp. 219–224. [Google Scholar]
- Nazin, A.V. Algorithms of Inertial Mirror Descent in Convex Problems of Stochastic Optimization. Autom. Remote Control 2018, 79, 78–88. [Google Scholar] [CrossRef]
- Utkin, V. Sliding Modes in Control and Optimization; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Fridman, L.; Poznyak, A.; Bejarano, F.J. Robust Output LQ Optimal Control via Integral Sliding Modes; Birkhäuser: Basel, Switzerland; Springer Science and Business Media: New York, NY, USA, 2014. [Google Scholar]
- Utkin, V.; Poznyak, A.; Orlov, Y.V.; Polyakov, A. Conclusions. In Road Map for Sliding Mode Control Design; SpringerBriefs in Mathematics; Springer International Publishing: Cham, Switzerland, 2020; pp. 125–127. [Google Scholar]
- Poznyak, A.S.; Nazin, A.V.; Alazki, H. Integral Sliding Mode Convex Optimization in Uncertain Lagrangian Systems Driven by PMDC Motors: Averaged Subgradient Approach. IEEE Trans. Autom. Control 2021, 66, 4267–4273. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Convex Analysis; Princeton University Press: Princeton, NJ, USA, 1970. [Google Scholar]
- Ben-Tal, A.; Nemirovski, A. The Conjugate Barrier Mirror Descent Method for Non-Smooth Convex Optimization; Minerva Optimization Center, Technion Institute of Technology: Haifa, Israel, 1999. [Google Scholar]
- Juditsky, A.B.; Nazin, A.V.; Tsybakov, A.B.; Vayatis, N. Recursive aggregation of estimators by the mirror descent algorithm with averaging. Probl. Inf. Transm. 2005, 41, 368–384. [Google Scholar] [CrossRef]
- Patel, D.K. Mathematical modeling of open loop PMDC motor using MATLAB/Simulink. Int. J. Eng. Develop. Res 2015, 3, 495–500. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nazin, A.; Alazki, H.; Poznyak, A. Robust Tracking as Constrained Optimization by Uncertain Dynamic Plant: Mirror Descent Method and ASG—Version of Integral Sliding Mode Control. Mathematics 2023, 11, 4112. https://doi.org/10.3390/math11194112
Nazin A, Alazki H, Poznyak A. Robust Tracking as Constrained Optimization by Uncertain Dynamic Plant: Mirror Descent Method and ASG—Version of Integral Sliding Mode Control. Mathematics. 2023; 11(19):4112. https://doi.org/10.3390/math11194112
Chicago/Turabian StyleNazin, Alexander, Hussain Alazki, and Alexander Poznyak. 2023. "Robust Tracking as Constrained Optimization by Uncertain Dynamic Plant: Mirror Descent Method and ASG—Version of Integral Sliding Mode Control" Mathematics 11, no. 19: 4112. https://doi.org/10.3390/math11194112
APA StyleNazin, A., Alazki, H., & Poznyak, A. (2023). Robust Tracking as Constrained Optimization by Uncertain Dynamic Plant: Mirror Descent Method and ASG—Version of Integral Sliding Mode Control. Mathematics, 11(19), 4112. https://doi.org/10.3390/math11194112