
Robust Cascade Control inside a New Model-Matching Architecture



Abstract
1. Introduction
- A new control structure with nested feedback loops from the states and feedforward loops from the set point will be proposed. A novel QFT solution will be given to compute the bounds and design the feedforward and the two feedback controllers for robust tracking, robust stability, and robust disturbance rejection.
- A method will be provided for determining the best distribution between the inner and outer loops of a predetermined amount of feedback over a fixed control bandwidth; a switching frequency will separate the working frequency bands of each loop. This will result in a pair of feedback controllers that minimize the amount of noise at the control input coming from the sensors. A sequential method will be detailed to design first the inner feedback controller, then the outer feedback controller, and finally the feedforward controller.
2. Architecture and Control Fundamentals
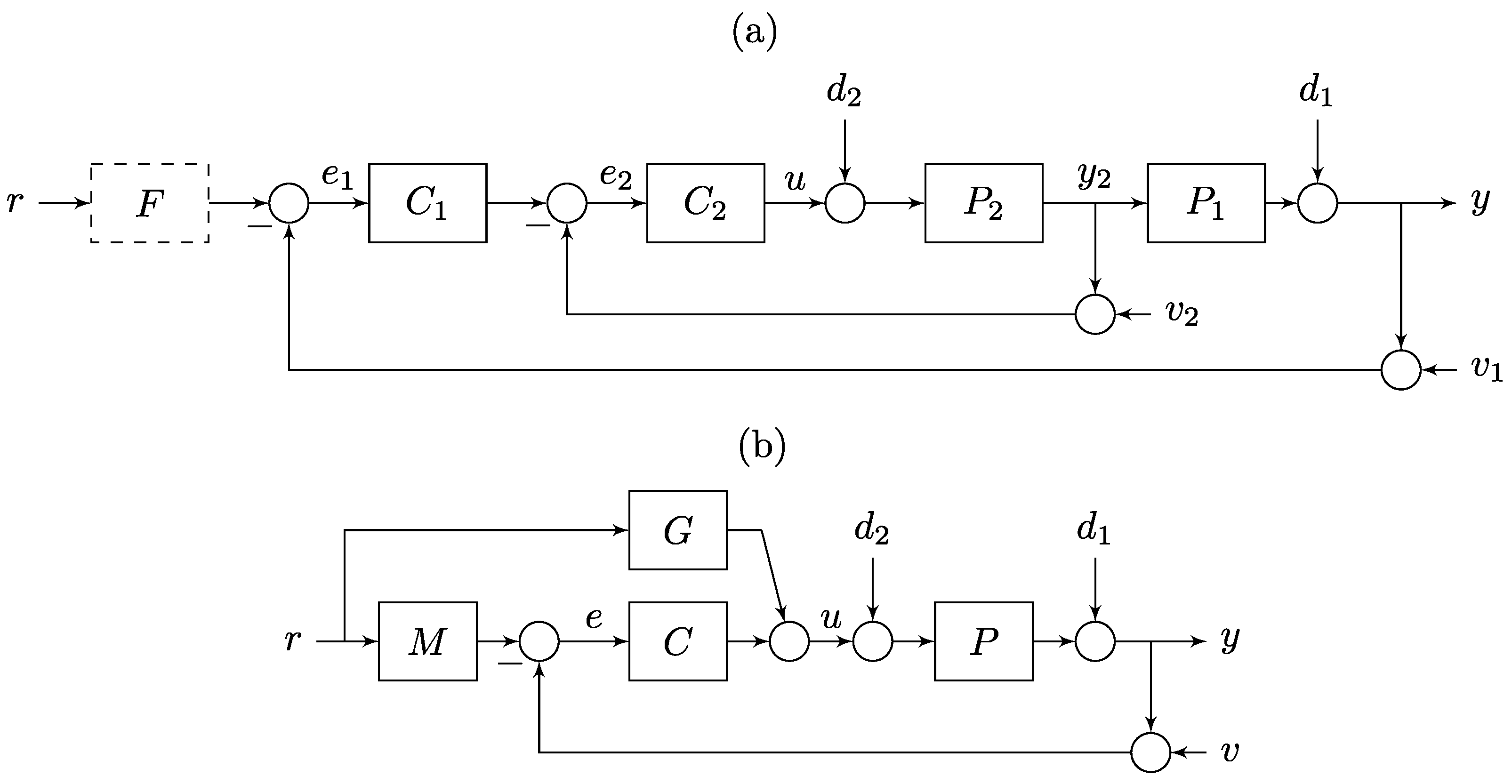
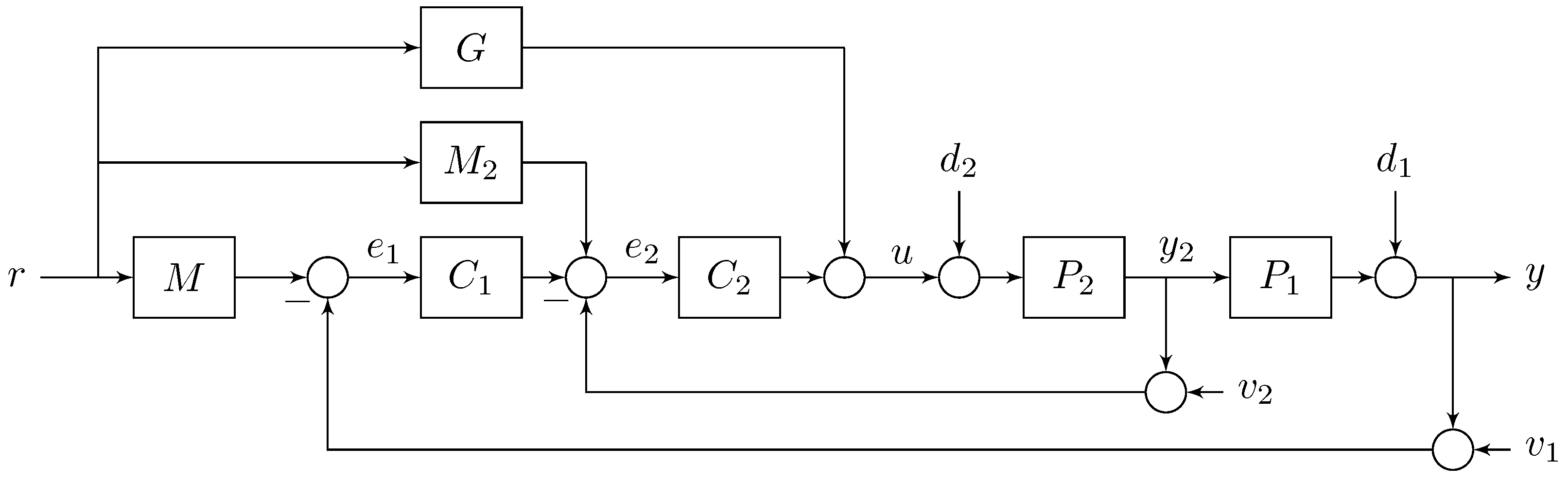
2.1. Control Structure
2.2. Robust Control under QFT Paradigm
3. Design Methodology
3.1. First Stage: Design of the Inner Feedback Controller
3.2. Second Stage: Design of the Outer Feedback Controller
3.3. Third Stage: Design of the Feedforward Controller
4. Design Example and Comparisons
4.1. Solution Achieved by the New Proposal
4.2. Comparatives with Other Structures and Strategies
4.3. Remarks on Disturbance Rejection and Integral Control
5. Validation on a Real System
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Garcia-Sanz, M. Robust Control Engineering: Practical QFT Solutions; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Sidi, M.J. Design of Robust Control Systems: From Classical to Modern Practical Approaches; Krieger Publishing Company: Malabar, FL, USA, 2001. [Google Scholar]
- Horowitz, I. Quantitative Feedback Design Theory (QFT); QFT Publications: Boulder, CO, USA, 1993. [Google Scholar]
- Liu, P.; Song, Y.; Yan, P.; Sun, Y. Actuator Saturation Compensation for Fast Tool Servo Systems with Time Delays. IEEE Access 2021, 9, 6633–6641. [Google Scholar] [CrossRef]
- Horowitz, I.; Sidi, M. Synthesis of cascaded multiple-loop feedback systems with large plant parameter ignorance. Automatica 1973, 9, 589–600. [Google Scholar] [CrossRef]
- Marlin, T.E. Process Control: Designing Processes and Control Systems for Dynamic Performance; McGraw-Hill Science, Engineering & Mathematics: New York, NY, USA, 2000. [Google Scholar]
- Siddiqui, M.A.; Anwar, M.; Laskar, S.; Mahboob, M. A unified approach to design controller in cascade control structure for unstable, integrating and stable processes. ISA Trans. 2021, 114, 331–346. [Google Scholar] [CrossRef]
- Alfaro, V.; Vilanova, R.; Arrieta, O. Robust tuning of Two-Degree-of-Freedom (2-DoF) PI/PID based cascade control systems. J. Process Control 2009, 19, 1658–1670. [Google Scholar] [CrossRef]
- Jia, B.; Mikalsen, R.; Smallbone, A.; Zuo, Z.; Feng, H.; Roskilly, A.P. Piston motion control of a free-piston engine generator: A new approach using cascade control. Appl. Energy 2016, 179, 1166–1175. [Google Scholar] [CrossRef]
- Wu, W.; Jayasuriya, S. A new QFT design method for SISO cascaded-loop design. J. Dyn. Syst. Meas. Control Trans. ASME 2001, 123, 31–34. [Google Scholar] [CrossRef]
- Borghesani, C.; Chait, Y.; Yaniv, O. Quantitative Feedback Theory Toolbox. For Use with Matlab, 2nd ed.; Terasoft: San Diego, CA, USA, 2002. [Google Scholar]
- Chait, Y.; Yaniv, O. Multi-input/single-output computer-aided control design using the quantitative feedback theory. Int. J. Robust Nonlinear Control 1993, 3, 47–54. [Google Scholar] [CrossRef]
- Eitelberg, E. Quantitative feedback design for tracking error tolerance. Automatica 2000, 36, 319–326. [Google Scholar] [CrossRef]
- Boje, E. Pre-filter design for tracking error specifications in QFT. Int. J. Robust Nonlinear Control 2003, 13, 637–642. [Google Scholar] [CrossRef]
- Elso, J.; Gil-Martínez, M.; García-Sanz, M. Quantitative feedback-feedforward control for model matching and disturbance rejection. IET Control Theory Appl. 2013, 7, 894–900. [Google Scholar] [CrossRef]
- Rico-Azagra, J.; Gil-Martínez, M. Feedforward for Robust Reference Tracking in Multi-Input Feedback Control. IEEE Access 2021, 9, 92553–92567. [Google Scholar] [CrossRef]
- Pretorius, A.; Boje, E. Robust plant by plant control design using model-error tracking sets. Int. J. Robust Nonlinear Control 2019, 29, 3330–3340. [Google Scholar] [CrossRef]
- Jeyasenthil, R.; Kobaku, T. Quantitative Synthesis to Tracking Error Problem Based on Nominal Sensitivity Formulation. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2483–2487. [Google Scholar] [CrossRef]
- Rico-Azagra, J.; Gil-Martínez, M.; Elso, J. Quantitative feedback control of multiple input single output systems. Math. Probl. Eng. 2014, 2014, 1–17. [Google Scholar] [CrossRef]
- Gil-Martínez, M.; Rico-Azagra, J.; Elso, J. Frequency domain design of a series structure of robust controllers for multi-input single-output systems. Math. Probl. Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Rico-Azagra, J.; Gil-Martínez, M. Feedforward of measurable disturbances to improve multi-input feedback control. Mathematics 2021, 9, 2114. [Google Scholar] [CrossRef]
- Velazquez, M.; Cruz, D.; Garcia, S.; Bandala, M. Velocity and Motion Control of a Self-Balancing Vehicle Based on a Cascade Control Strategy. Int. J. Adv. Robot. Syst. 2016, 13, 106. [Google Scholar] [CrossRef]
- Lin, P.; Wu, Z.; Fei, Z.; Sun, X.M. A Generalized PID Interpretation for High-Order LADRC and Cascade LADRC for Servo Systems. IEEE Trans. Ind. Electron. 2022, 69, 5207–5214. [Google Scholar] [CrossRef]
- Rico-Azagra, J.; Gil-Martínez, M.; Rico, R.; Maisterra, P. QFT bounds for robust stability specifications defined on the open-loop function. Int. J. Robust Nonlinear Control 2018, 28, 1116–1125. [Google Scholar] [CrossRef]
- Houpis, C.; Rasmussen, S.; Garcia-Sanz, M. Quantitative Feedback Theory: Fundamentals and Applications, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Visioli, A. Practical PID Control; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Strategy | Degrees of Freedom | |||||
|---|---|---|---|---|---|---|
| New architecture; | G (36) | (35) | (34) | 0.3429 | 0.001 | 0.1076 |
| Model matching; outer feedback | (38) | (37) | —— | 78.0065 | 6085 | 0 |
| Model matching; inner feedback | (40) | —- | (39) | 0.3780 | 0 | 0.1429 |
| Double feedback; no feedforward | —– | (42) | (43) | 1.1882 | 0.0053 | 1.4065 |
| New architecture; | (46) | (44) | (45) | 0.6929 | 0.3797 | 0.1004 |
| New architecture; | (49) | (47) | (48) | 0.3586 | 0.00022 | 0.1284 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rico-Azagra, J.; Gil-Martínez, M. Robust Cascade Control inside a New Model-Matching Architecture. Mathematics 2023, 11, 2523. https://doi.org/10.3390/math11112523
Rico-Azagra J, Gil-Martínez M. Robust Cascade Control inside a New Model-Matching Architecture. Mathematics. 2023; 11(11):2523. https://doi.org/10.3390/math11112523
Chicago/Turabian StyleRico-Azagra, Javier, and Montserrat Gil-Martínez. 2023. "Robust Cascade Control inside a New Model-Matching Architecture" Mathematics 11, no. 11: 2523. https://doi.org/10.3390/math11112523
APA StyleRico-Azagra, J., & Gil-Martínez, M. (2023). Robust Cascade Control inside a New Model-Matching Architecture. Mathematics, 11(11), 2523. https://doi.org/10.3390/math11112523