1. Introduction
The inviscid shallow water equations describe the behavior of a shallow incompressible and inviscid fluid layer and are suitable to model hydrodynamics in coastal seas, estuaries, lakes and rivers. They are derived from the depth-integrated Euler or Navier–Stokes equations under the hydrostatic pressure assumption. Since both these equations and the Euler equations of gas dynamics have a similar mathematical structure, reflecting the resemblance between the hydraulic jumps and shock waves in compressible flow, conventional high resolution schemes for treating shocks are likewise a commonplace tool in the numerical modeling of rapidly varying shallow water flows.
The theory of weak solutions is the traditional approach in the framework of numerical analysis of nonlinear hyperbolic partial differential equations [
1,
2]. This theory necessitates these equations to be expressed in conservation form, and has thus created a natural ground for the development of finite volume methods [
3,
4]. However, such methods often cannot prevent the obtained solutions from being unphysical when subjected to discontinuities (entropy-violating solutions), and heuristic attempts are then made to adequately recover the discontinuous behavior. Shock-capturing techniques, usually with an entropy fix [
5,
6], and well-balanced methods are particularly appealing in addressing such needs. They routinely regularize the governing equations by some degree of non-physical dissipation.
For example, applications of approximate Riemann solvers to shallow water equations are found in, e.g., [
7,
8,
9]. They aim to exploit the hyperbolicity property of the conservation laws with source terms, which is, however, substantially problematic to master the development of numerical codes. The lack of well-balancing in the resulting numerical schemes is perhaps the most prominent one [
10]. This imbalance typically leads to artificial flow transitions over discontinuous bed topography in water initially at rest. Although the design of well-balanced Riemann solvers has been frequently reported in the literature with varying degrees of success, one may still encounter the risk of approximating a non-physical solution, even though by refining the grid.
Alternative methods have been proposed that avoid the necessity to solve a Riemann problem, such as the central-upwind methods [
11,
12], the artificial viscosity approach [
13,
14,
15,
16], and the energy-stable schemes using numerical diffusion operators based on entropy variables [
17], just to mention a few. Though this abundance of methods may have proven to be a reasonable means of predicting the evolution of shock waves, their mathematical theory does in general not constitute a conclusive approach, as it provides no clear-cut measures to regularize the inviscid flow equations in a physically consistent manner. It remains to be seen whether any of such discretizations will produce the physically realistic solution, especially when it is highly nonlinear and rapidly varying.
An example involves the introduction of artificial viscosity into a space-centered discretization. Although artificial viscosity has a direct analogy to physical dissipation, it poses a major problem for overall physical accuracy, as its generic forms have an explicit choice regarding shock layer thickness, while one has control over the amount of dissipation through the associated tuning parameters. It is not a trivial task to find suitable values for these parameters because they are typically problem and mesh dependent and, as such, their underlying methods are likely to fail to converge to physically based solutions [
15,
16].
Over the years, staggered C-grid methods have been developed for the modeling of rapidly varied flows, and have shown remarkable potential in predicting the formation of hydraulic jumps, bores and breaking waves; see, e.g., the papers of Stelling and Duinmeijer [
18] and others [
19,
20,
21,
22]. The staggered spatial discretization schemes of the type proposed by Arakawa [
23] are primarily designed for accurate and efficient computation of incompressible (often gradually varying) flows. The computational efficiency along with the physical accuracy is also the central theme in the above mentioned papers. Furthermore, staggered C-grid schemes exhibit distinguished properties such as the absence of spurious pressure modes and the local mass conservation. These attractive numerical properties are due to the staggering of the primary unknowns in a grid, with pressure at the cell center and the normal velocity components at the center of the cell faces. Yet, to the best of author’s knowledge, such methods are the only class of discretization methods that are capable of accurately resolving the hydrodynamic shocks under various flow regimes without recourse to any explicit solution regularization. See [
22] for details.
The main contribution of this paper is to provide a rationale for this finding by using the language of nonstandard calculus. Here, we first give a brief background to this branch of modern mathematics and in particular its natural discrete representation of physical phenomena, which is then followed by an outline of the current work.
Historically, the Newtonian mechanics was closely connected with the early development of calculus that proceeded for centuries on heuristic arguments of infinitesimals [
24,
25]. The paradoxical difficulties raised by infinitesimals were thoroughly bypassed by employing the
definitions of limit, as introduced in the nineteenth century. In the 1960s, a rigorous framework for dealing with infinitely small and infinitely large quantities as numbers has entered the area of pure mathematics. This new application of infinitesimals and infinite numbers (not to be confused with infinity
∞), termed nonstandard analysis, was invented as an alternative to the
limit to put the means of calculus on a sound footing. Even more so, the use of infinitesimals is, to a greater extent, effective and insightful than the traditional analysis in terms of
and
. Today, nonstandard analysis helps to reconcile the way infinitesimals are used in, e.g., applied mathematics, physics and engineering with some formalism.
Nonstandard analysis basically extends the real numbers to the hyperreal numbers that involve infinite and infinitesimal numbers [
26,
27]. Because of the existence of infinitesimals in the hyperreal number system, the process of limit is no longer an issue. The implication is that the interpretation of the derivative is viewed as a finite process rather than an infinite limiting procedure [
27]. Specifically, either a derivative is utilized for finding the limit of a difference quotient of vanishing quantities, that is, measuring the instantaneous rate of change, or a derivative is considered as the ultimate limit of the ratio of small but finite quantities. While the former statement is related to the
concept of calculus, the last assertion has a physical meaning, in the sense that no physical quantity can be measured to infinite precision. Yet, once the limit is performed, a continuum model is obtained that does no longer resolve features on the various length scales; they actually contracted to (zero-dimensional) points. Moreover, all physically relevant quantities must then be infinitely differentiable.
The extension to the hyperreals comes equipped with a hierarchical lattice-like structure on the Euclidean space. Such a structure shares many of the properties of topological spaces and is essentially simpler than the continuum. In particular, the presence of a non-vanishing length scale is distinctly defined. It thus provides a means for developing a discrete model to describe a physical system with very large degrees of freedom. As it will be demonstrated in the present study, this becomes particularly relevant for problems with discontinuities. In fact, as we will see, this approach inherently deals with the regularization of the discontinuity.
Viewed in this way, the discrete model is more rich in physics than the continuum model. This may seem counterintuitive, as it is deeply ingrained in our conceptual understanding of the differential equation that it provides a truer description of a physical problem than any discrete formulation that approximates the original equation in a way that it produces solution sufficiently close to the “exact” solution. Note that we have put the word exact in quotes to emphasize the difference with the actual, that is, physical-based solution to the problem in question.
That said, the crux of nonstandard calculus lies in the development of mathematical models with a degree of computability, which also have a meaningful physical sense. Even though the significance of this view has long been recognized in the field of nonstandard analysis, see, e.g., [
28,
29], it is still relatively unknown to applied mathematicians, physicists and engineers, given the fact that the large majority of mathematical models in physics and engineering are based on continuous partial differential equations.
The organization of the paper is as follows. In
Section 2, first a basic understanding of the concepts of nonstandard analysis is presented. We address the natural extension of differentiation to the hyperreal numbers by means of infinitesimal increments. An important feature of this extension is that the derivative turns into a discrete process while handling the discontinuities adequately. Inspired by this key observation, a nonstandard rendition of the inviscid shallow water equations is formulated that expresses exactly the discrete conservation of mass and momentum across a hydraulic jump in an open channel with uniform bed. Such discrete formulations additionally advocate the use of the staggered C-grid arrangement and are amenable to be numerically solved. We then highlight that the continuous form of the traditional shallow water equations is the standard part of the obtained finite difference equations, while they have lost properties typically associated with hydrodynamic shocks. To gain some insight on the solution regularization,
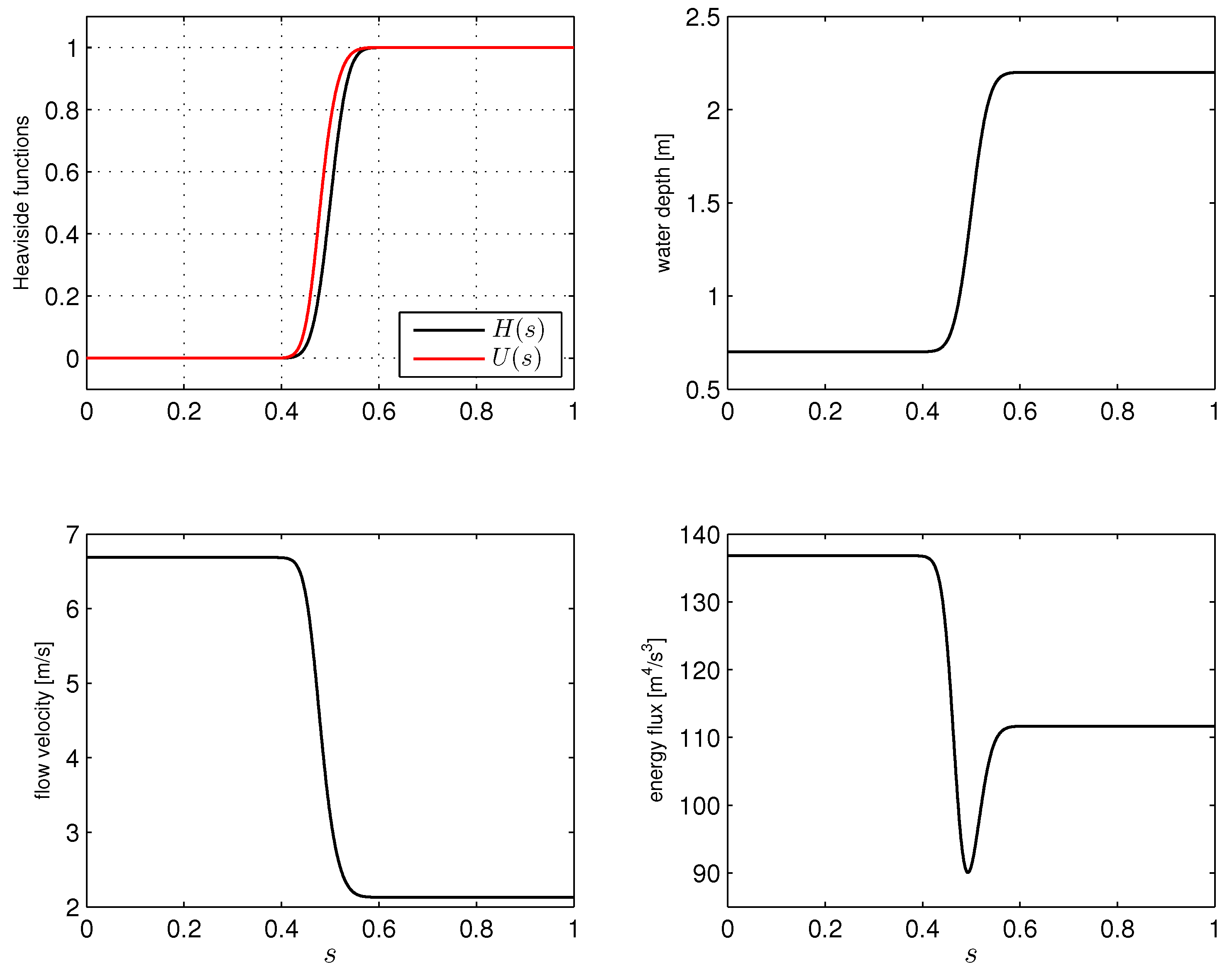
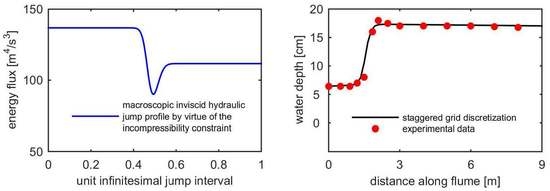
Section 3 analyses the distribution of the flow field across the hydraulic jump, where the nonstandard Heaviside functions are employed to model smooth jump functions for the flow variables such as water depth, velocity and mechanical energy. A key result of this nonstandard analysis is that, unlike the primitive variables, the energy flux displays an undershoot in the hydraulic jump, suggesting that the viscosity does not play a crucial role, as similarly observed by Salas and Iollo [
30], who demonstrated a local maximum of the entropy profile inside an inviscid gaseous shock. Numerical computations to study the formation of a hydraulic jump in a rectangular channel are performed as detailed in
Section 4. Finally, conclusions are stated in
Section 5.
2. Discretization of Shallow Water Equations from the Perspective of Nonstandard Calculus
2.1. Nonstandard Calculus
A complete introduction to nonstandard analysis can be found in the textbooks of Goldblatt [
26] and Keisler [
27]. In the following, the building blocks of nonstandard calculus, in particular, those used in this work, are briefly reviewed.
Basically, nonstandard analysis deals with an extension of the real number line including nonzero infinitesimals and infinitely large numbers, along with the real numbers. This extended set is denoted by , and its elements are called hyperreals (or nonstandard reals). An infinitesimal is, in absolute value, a number that is smaller than every positive real number. Zero is the only real number that is an infinitesimal. The reciprocal of a nonzero infinitesimal is a hyperlarge number (or infinitely large or simply infinite), which is larger than any real number, though strictly smaller than infinity. If a number is not hyperlarge, it is called finite (or limited). Accordingly, every real number is finite. Finally, a number which is limited and not infinitesimal is called appreciable.
Neither nonzero infinitesimals nor infinitely large numbers exist on the real line. Yet, they can be treated in much the same way as standard numbers. This property is known as the transfer principle. As an example, the reals are an ordered field, and so are the hyperreals; infinitesimals differ in magnitude from other infinitesimals, and hyperlarge numbers from other hyperlarge numbers. For details on the construction of the nonstandard reals, we refer to Goldblatt [
26].
Let be an infinitesimal and x and y be finite hyperreals. We define the relation as is infinitesimal or zero. It immediately follows that . This corollary essentially captures the idea of “arbitrary close” that lies at the heart of the well-known limit in calculus.
Furthermore, let a be a real number. The standard part of x, denoted by st(x), is a unique real a infinitely close to x, thus a = st(x). Consequently, . A hyperlarge number cannot have a standard part. The standard part function provides an essential link between the finite hyperreals and the real numbers.
Next to the hyperreal numbers, one also deals with hyperfunctions. Given a function f from to , there is a unique function , called the *-transform of f, such that if and only if . Thus, is a nonstandard extension of f.
Let
, then the derivative of
f at point
x, denoted
, is defined by
for every nonzero infinitesimal
, provided that
exists independent of
. Function
f is said to be differentiable at point
x. Notice that the derivative of
f is not defined by a vanishing limit
, but as the standard part of a difference quotient;
is infinitesimally close to that quotient. As a basic example, we consider
. Its derivative is calculated as follows:
This example clearly demonstrates the effectiveness of using nonzero infinitesimals to determine the derivative without the need of an endless
limiting process and, in turn, provides a rigorous basis for the calculus. For further illustrative examples, we refer to Keisler [
27]. The transfer principle guarantees that all familiar rules involving derivatives, e.g., the product, quotient, and chain rules, also hold for hyperreal-valued functions.
Next, suppose that
exists at point
x and let
be a nonzero infinitesimal. Then, the increment of
f, denoted
, due to change
is given by
for some
. Consequently,
Thus, the standard part of the quotient equals the derivative . This result is known as the increment theorem. By virtue of the transfer principle, this property can be generalized to functions of multiple variables. Note that the infinitesimal can be viewed as an error term, which depends on .
The use of infinitesimals in nonstandard analysis enables us to study topological spaces of reals induced by hyperfinite lattices. (Hyperfinite sets may be treated as finite sets, though they are generally infinite.) A halo (or a monad) of a point x on the hyperreal line is the interval of hyperreals that are infinitesimally close to x. Let denote the halo of x, then . While every point on the real line has zero dimensions, the size of each halo on the hyperreal line is infinitesimal. A halo is said to possess a microstructure. There exist infinitely large halos containing the point x. Furthermore, if x is finite, then , while not including other real numbers. Additionally, the halos of different real numbers do not overlap.
2.2. Discrete Formulations
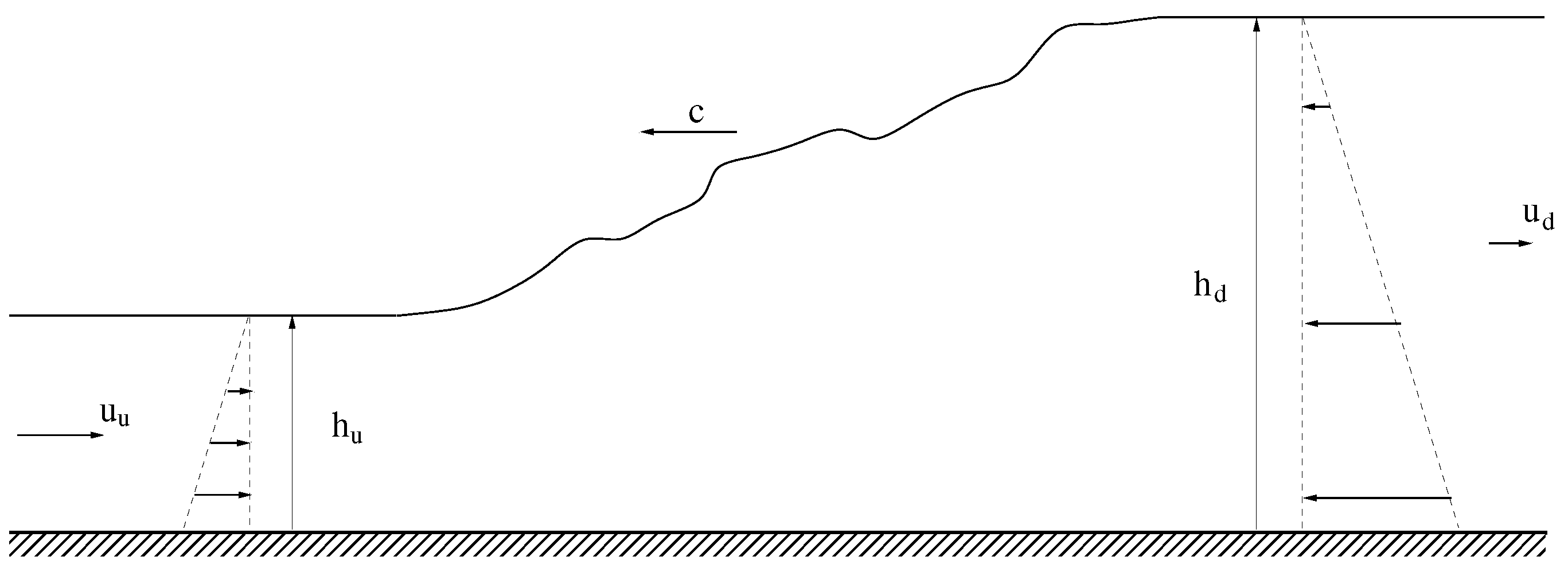
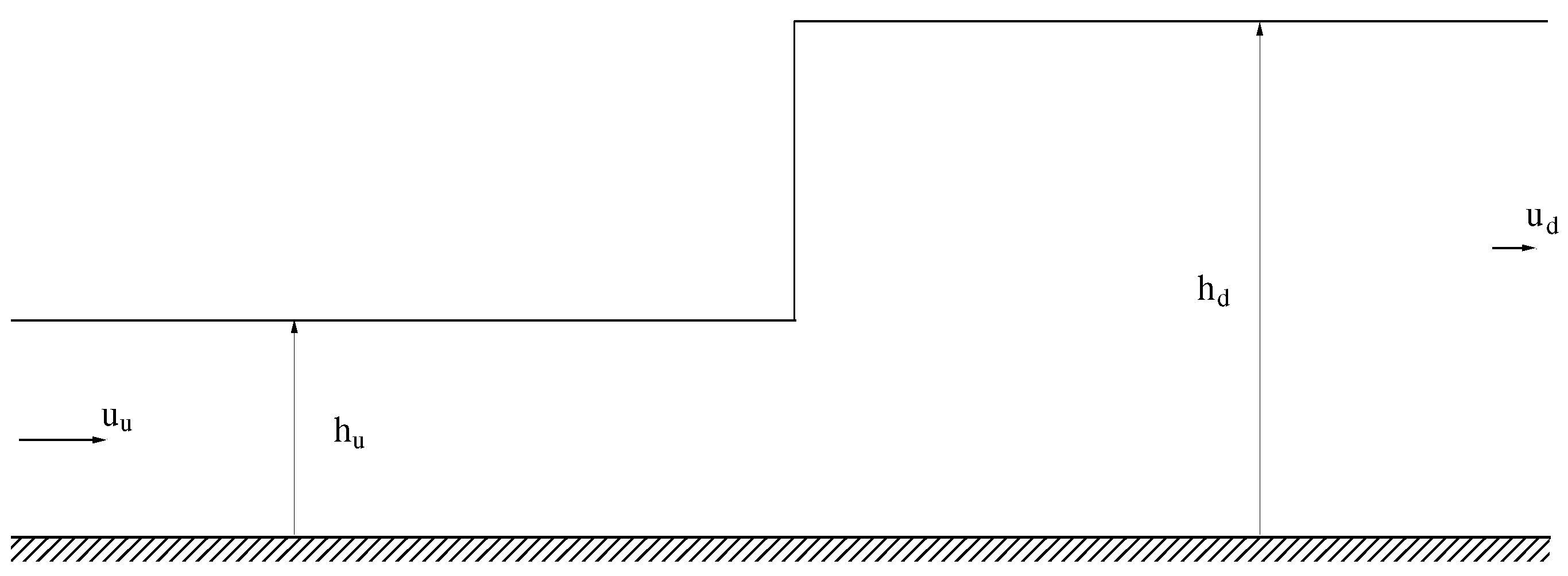
A hydraulic jump forms at the transition from the upstream supercritical flow to the downstream subcritical flow. A sudden rise subsequently occurs in the free surface while the flow is rapidly varied. Let us consider the hydraulic jump that moves at a constant speed
c in an open channel with a uniform bed. The rate at which the flow changes between the upstream state and the downstream state is determined by the flow continuity and the momentum balance. Following Stoker [
31], they can be written, respectively, in the following form
and
Here, the variables
h and
u have their conventional meanings of water depth and flow velocity, whereas the subscripts
u and
d refer to the upstream and downstream states with respect to the jump; see
Figure 1.
Furthermore, g is the acceleration of gravity. Note that the vertical pressure distribution away from the jump is hydrostatic.
Microscopically, due to viscous forces acting in the large flow gradients within the relatively thin jump layer, the flow is irreversible. Some of the kinetic energy is converted into an increase in potential energy and the remainder is lost through turbulence to heat. Consequently, the downstream state must have a higher entropy than the upstream state.
The rate of energy loss in flow expansion can be computed as follows (see [
31]):
where
is the mechanical energy (flux) per unit mass (per unit width), with
labeling the position with respect to the jump, and
is the mass flux through the jump.
The physical laws of mass conservation, momentum transport (Newton’s law of motion) and energy loss (the second law of thermodynamics) thus provide the macroscopic balance of flow changes across the hydraulic jump. In fact, this applies to any form of discontinuity that is intrinsically linked to an irreversible process. Yet, the resolution of Equations (
1) and (
2) adequately resolves the large-scale features of the flow field, while fluid motions that occur at length scales smaller than the width of the jump layer are not captured.
For the discussion below and in
Section 3, and without loss of generality, we consider the channel with one dimension of space on the
axis. The flow passes through the hydraulic jump in the positive
direction. Accordingly, the traveling flow variables along a characteristic are a function of the similarity variable
. By virtue of the increment theorem, we have
Let the jump be located at some point S on the characteristic. Now, the extension of the real number line to include nonzero infinitesimals naturally permits to deal with the set of all points separated from S by an infinitesimal distance. This halo of S, denoted , conceptually resolves the scale of the flow variables across the jump. The size of the halo is given by , which is a nonzero infinitesimal.
Let the functions
and
be the water depth and flow velocity along the characteristic, respectively. These flow variables are constant on both sides of the infinitesimal jump. (Recall that the jump is uniformly moving with speed
c.) Furthermore, the downstream state is distanced from the upstream one by
. Then, mass balance (
1) with respect to the jump can be rewritten as
Using the variable transformation and a time shift of
, this equation is cast into
with
and
being the water depth and the flow velocity in the space-time domain, respectively. Note that point
is finite. Furthermore,
and
are the nonzero infinitesimals associated with halo
. Finally,
represents the infinitesimal area (per unit width) of the halo.
Physically, Equation (
4) describes the volume balance with which the infinitesimal rate of change in the volume
of a halo is equated to the net mass flux
(inflow less outflow) through the boundaries of the halo. This naturally leads to the staggered positioning of the variables
h and
q in space and in time; the water depth is located at points intermediate between the mass fluxes. It should be noted that here the water depth (or the water level) undergoes a jump in the halo
.
The partial differential equation describing the conservation of volume can be inferred from the nonstandard Equation (
4). Thus, noting that
, we have
and owing to the increment theorem, the standard part of this quotient yields
In the same way, we derive the momentum balance as follows. From Equation (
2), we have
This equation can be reshaped into space-time form as
(note the space shift of
) or, with
, one obtains
and its standard part is then given by
Equation (
6) describes the infinitesimal rate of change of the total momentum
for an inviscid fluid within a halo
through which the fluid flows. The first term on the left hand side is the local rate of change in momentum. Furthermore, the second and and the third term express the advective transfer of momentum with the mass flux
q as the transporting velocity. This advective acceleration causes a nonlinear spatial change in the flow velocity
u.
Now, the rate of change in momentum of the fluid is due to the action of hydrostatic pressure on the fluid on both sides of the halo as given by the right hand side of Equation (
6). Again, the momentum and the pressure are carried at alternate spatial locations. Moreover, the direction of the flow acceleration is aligned with that of the net streamwise force. Accordingly,
must be understood as the infinitesimal length of the path within the halo along which the momentum
(or depth-integrated velocity) is being transported. Thus, this momentum experiences a jump inside halo
.
A key feature of the discussed approach is the close association between the primary unknowns and the topology of the halo. In principle, the unknowns are the integrals over the points, lines, surfaces, and volumes, and are referred to as discrete forms of degree 0, 1, 2, and 3, respectively. Furthermore, they constitute a discrete representation for the primitive variables on a primal-dual pair of space lattices, which naturally induces staggering of the variables. For a more extensive survey of this topic, see Tonti [
32] and Ferretti [
29]. In the current depth-integrated framework, the area integral of
h over
(designated as the primal surface lattice of the halo) and the line integral of
along
(i.e., the dual of the edge lattice of the halo
) are the discrete 2-form and 1-form, respectively.
2.3. Discussion
Equations (
5) and (
7) are the one-dimensional nonlinear shallow water equations with the unknowns
h and
, suitable for cases with horizontal frictionless beds. (A physically consistent extension to the case of flows over varying bottom topography with bed friction is dealt with in, e.g., [
18,
22]) Such continuous differential equations are routinely viewed as a mathematical model for describing the dynamics of a physical system while its number of degrees of freedom is infinity; their main merit resides precisely in their uniqueness and universality, that is, they uniquely describe physics at all scales.
The mathematical model for the inviscid shallow water equations is typically presented as a hyperbolic system of conservation laws (e.g., [
8,
11,
16]). In one dimension, this system is of the form
where
is the vector of conserved variables,
is the vector function of inviscid flux, and
is a source vector. Note that such vectors are expressed as field functions at a given point
in the continuum. The mathematical structure of the hyperbolic system provides a good basis for the theory of weak solutions involving shock waves [
3]. Nevertheless, this mathematical framework is general and does not take into account the physical nature of the variation of hydraulic jumps. In fact, the system may also admit non-physical discontinuous solutions.
Within the framework of (usually non-staggered) finite volume methods, a stable high-resolution scheme can be adopted with the aim of constructing the numerical flux vector. Then, the residual of the resulting algebraic equations (as computed by substituting the exact solution) acts as the principal source of discretization error. Provided that the solution is continuous and smooth, this error will be infinitesimally small.
However, the situation becomes different when the flow variables are discontinuous so that the solution error is no longer infinitesimal. If a hydraulic jump is located in , so that irreversible processes intervene, the solution of the difference equations is rather different from the solution of the differential equations. This divergence persists in the limit of vanishing size of . Obviously, the effect of discontinuity leaves no trace on the solution of differential equations. As explained above, this effect is basically discarded by an application of the standard part function, which in turn implies that the spatial features of the halo (here and ) are lost. This loss should be restored afterward by the discretization process. This generally calls for measures, often proposed heuristically, to ensure the entropy consistency of the discretization. Examples of such measures have been discussed in the introduction section of this paper.
By contrast, the nonstandard Equations (
4) and (
6) are principally considered to describe mathematically a physical system with a hyperlarge number of degrees of freedom [
28]. This sole principle is built on the existence of nonzero infinitesimals. The resulting discrete equations establish the flow distribution within each infinitesimally small halo exhibiting a geometric structure, which may or may not contain a discontinuity. Furthermore, as it will be revealed in the next section, these equations have a built-in regularization effect on the solution.
The enrichment with a nonvanishing halo size is an essential feature because it paves the way towards grid partitioning of a flow domain. This feature provides a paradigm for constructing discretizations of the nonstandard equations that are naturally adapted for any type of grid system (Cartesian, curvilinear, and unstructured grids) and that behave correctly in a physical sense. By making the size of both
and
appreciable, the above system is translated into a finite but underdetermined system of equations. Its closure is commonly obtained by the addition of a number of constitutive (locally dependent) relations between the different solution fields, which involve the various interpolation (central and upwind) techniques. An example of this process of approximation can be found in
Appendix A.
The development of mixed finite volume-finite difference methods that use C-grid staggering on two-dimensional structured and unstructured (triangular) meshes for the modeling of rapidly varied flows in coastal waters is documented in, e.g., [
33,
34,
35,
36,
37].
4. Numerical Experiment
Gharangik and Chaudhry [
14] reported both laboratory and numerical experiments to investigate the formation of a hydraulic jump in a rectangular flume with metal walls and bed. These include six test conditions with the upstream Froude number
ranging from 2.3 to 7.0, and thus provide a useful benchmark solution for validating numerical methods. The objective of this test case is to assess the numerical efficiency of the staggered C-grid discretization as outlined in
Section 2.2. Its complete description and implementation is given in
Appendix A.
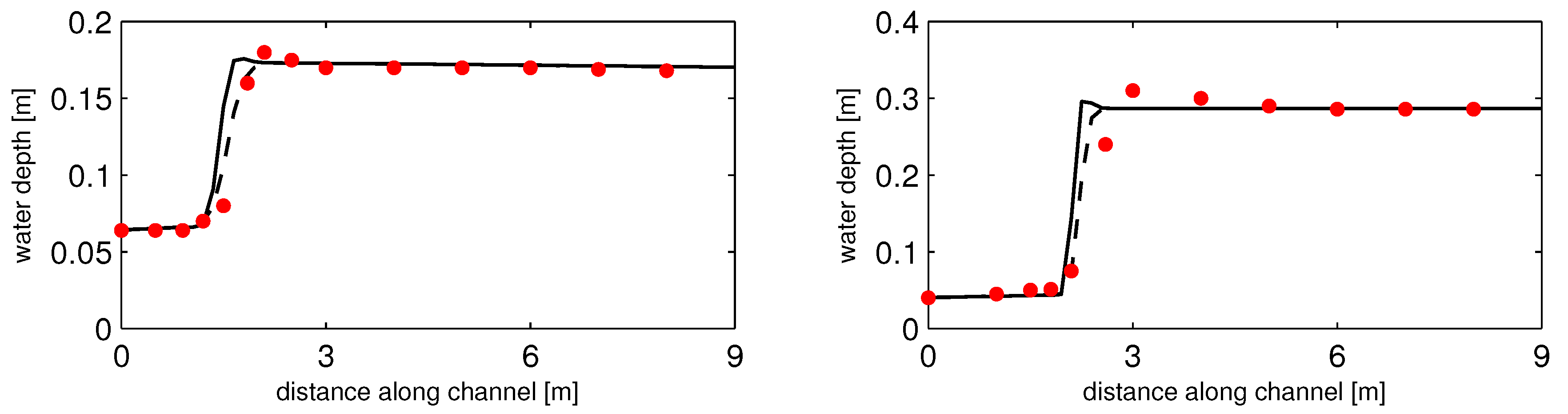
Numerical results of the current method are presented for two conditions:
= 2.30 (test no. 6 of [
14]) and
= 5.74 (test no. 3). The flume dimensions and flow parameters for these cases are identical to those used by Gharangik and Chaudhry [
14].
The computational grid was uniform and the grid size was set to 0.15 m. At the upstream boundary, an in-going Riemann invariant, defined as
, was imposed, whereas at the downstream end the water depth
was fixed. The time step was initially taken as 0.01 s and the Courant number was set equal to 0.5 (see
Appendix A). The simulation time was set to 90 s, which was long enough to get a stabilized jump. Following Gharangik and Chaudhry [
14], a Manning’s bed roughness coefficient of
was adopted. No artificial viscosity nor flux limiting was applied in the course of simulations.
Numerical predictions and comparisons with the experimental data are depicted in
Figure 4.
Here, the momentum advection is approximated by means of two upwind schemes: the first order upwind scheme (see
Appendix A) and the second order Fromm’s scheme [
44]. The latter scheme is designed for low numerical dispersion and dissipation.
Obviously, model-predicted jump profiles agree very well with the measurements. The location of the steady-state jump is adequately captured by the numerical approach. Additionally, the steepness of the jump profile is hardly affected by the amount of numerical diffusion induced by an advection scheme. This suggests that the role of this diffusion in the formation of the jump is less relevant than commonly believed. This finding is in line with the conclusion of
Section 3.3.
To verify the correctness of the simulations the well-known Bélanger formula is employed and is given by
Based on the numerical outcomes, we observed a 5% lower ratio
in comparison with Equation (
16), which is acceptable.
It is further observed that there are virtually no spatial oscillations, albeit a small overshoot produced by the Fromm’s scheme. It should be noted that the numerical methods employed by Gharangik and Chaudhry [
14] necessarily involve some amount of artificial viscosity to suppress these oscillations, and possibly numerical instability. The same conclusion is also found in [
16]. The main cause of such oscillations is due to the non-staggered arrangement of the unknowns, which induces a checkerboard pattern. In turn, this can lead to a loss of continuity of the mass flux. Lastly, the study of Ginting [
16] has also demonstrated the influence of the tuning of artificial viscosity on the jump location.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}