
Border Irrigation Modeling with the Barré de Saint-Venant and Green and Ampt Equations



Abstract
:1. Introduction
2. Materials and Methods
2.1. Numerical Solution
2.2. Solution Technique
2.3. Analytical Representation of the Optimal Flow
3. Results
3.1. Application
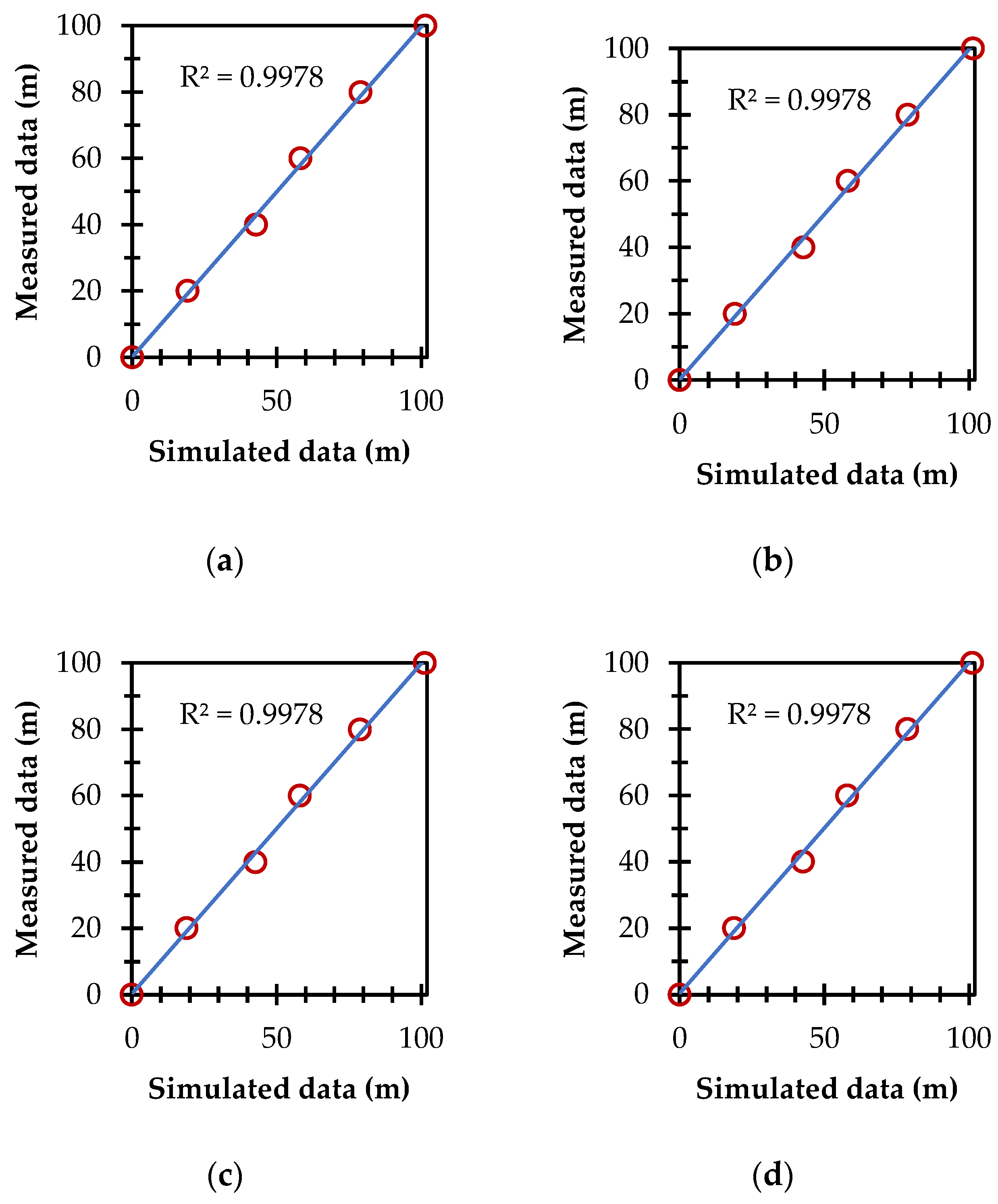
3.2. Numerical Validation
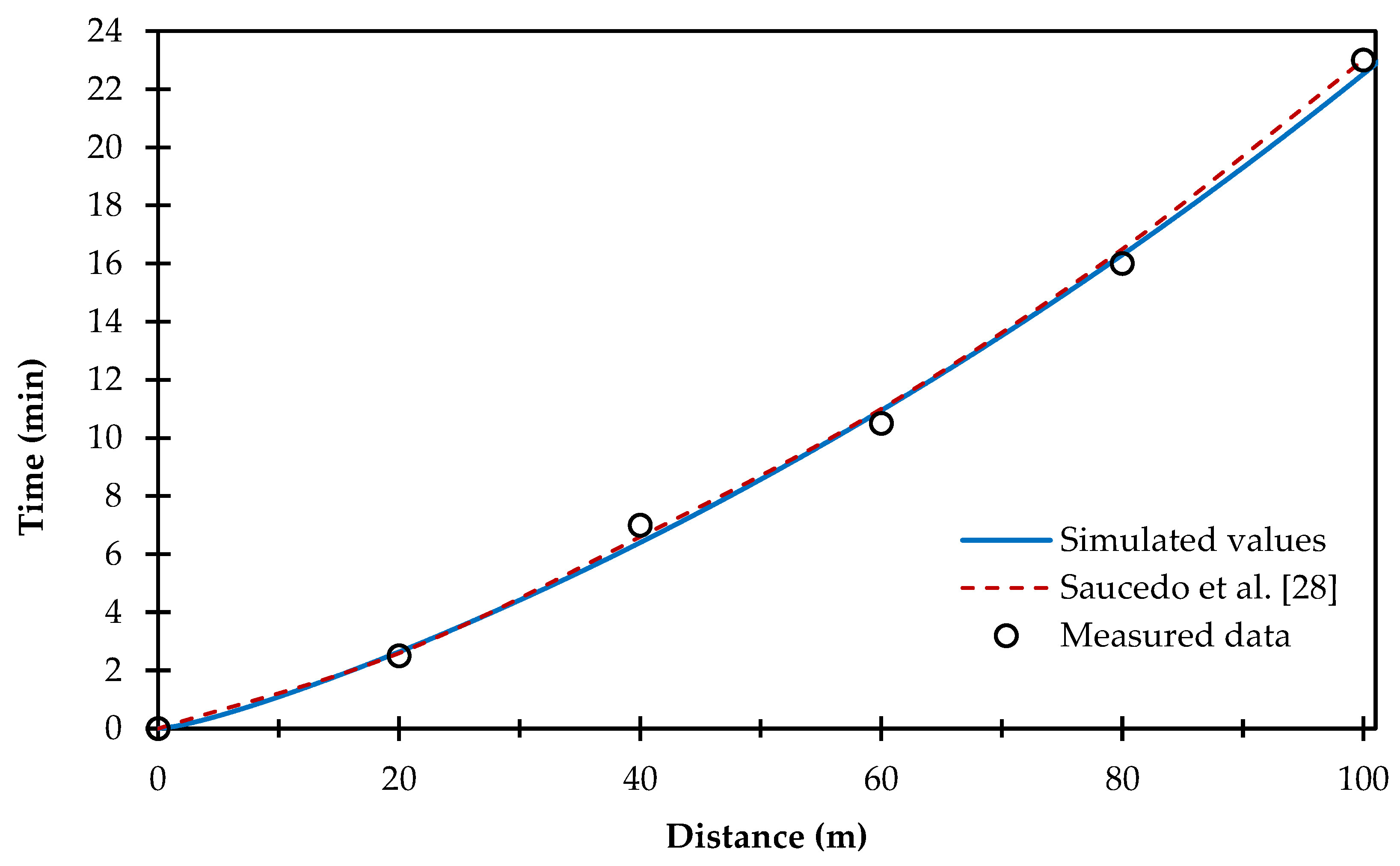
3.3. Comparison of Numerical Solutions
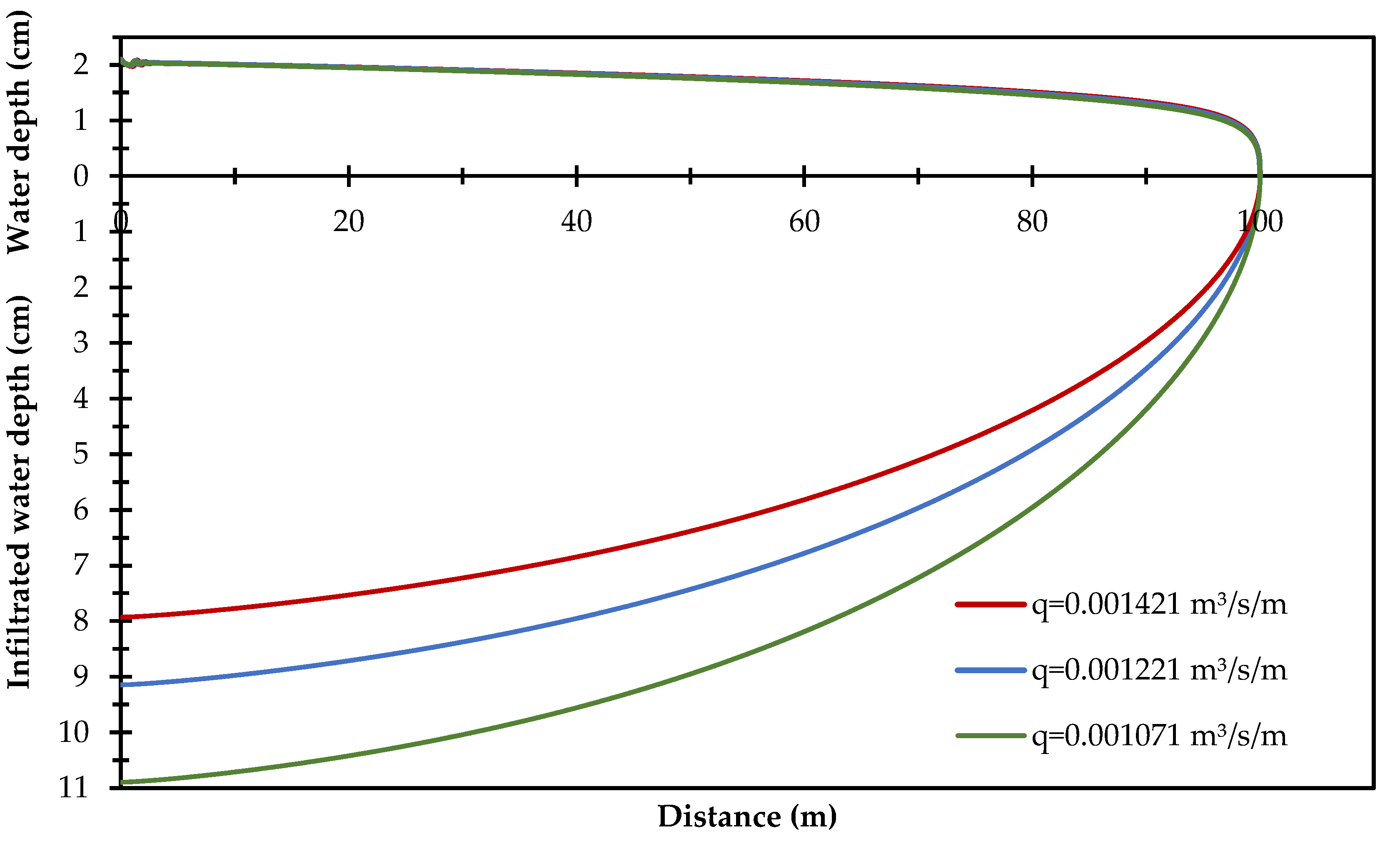
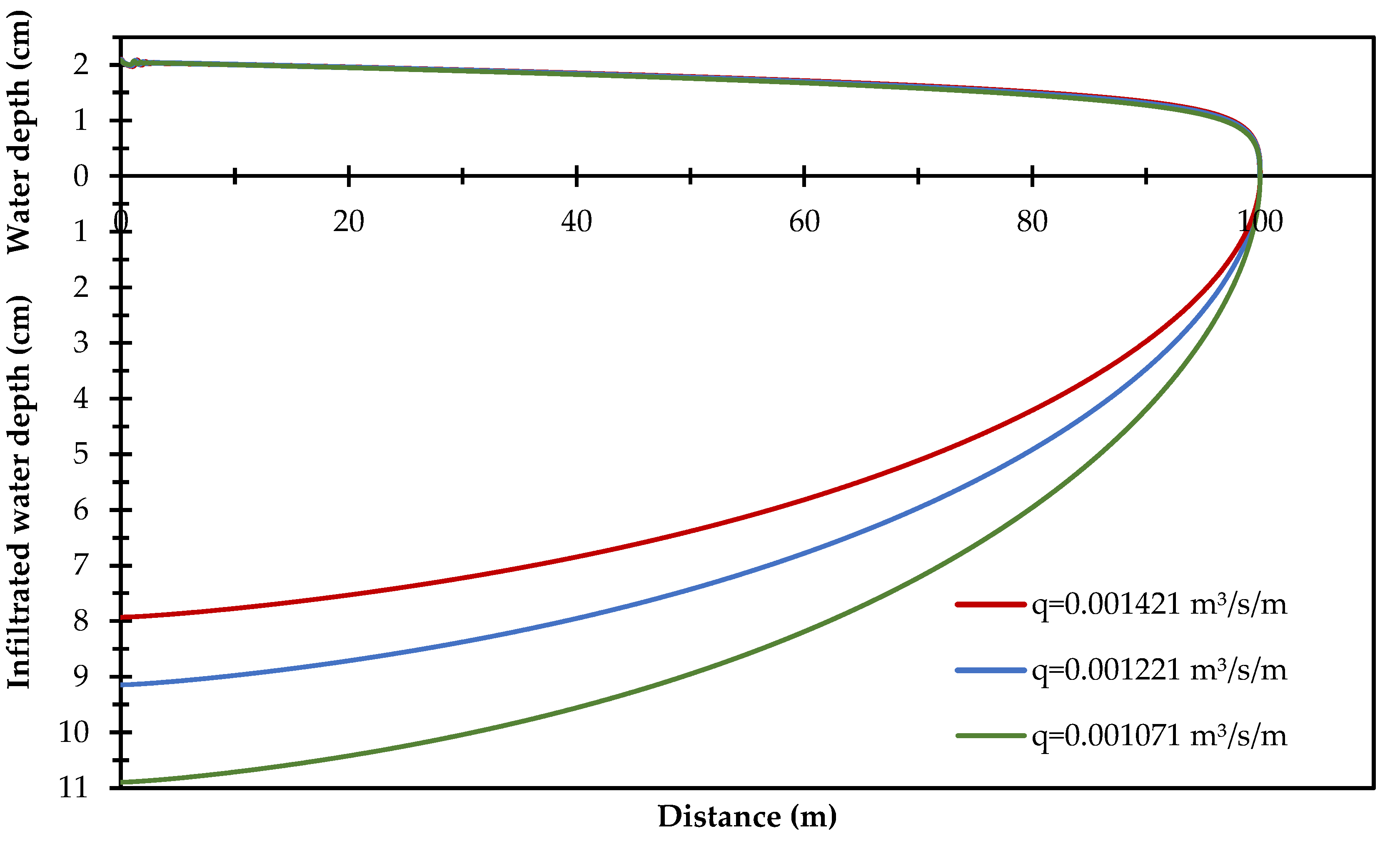
3.4. Efficient Computation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fuentes, C.; De León-Mojarro, B.; Hernández-Saucedo, F.R. Gravity irrigation hydraulics. In Gravity Irrigation; Fuentes, C., Rendón, L., Eds.; Nacional Association of Irrigation Specialist: Mexico, Spain, 2017; pp. 1–66. [Google Scholar]
- Soroush, F.; Fenton, J.D.; Mostafazadeh-Fard, B.; Mousavi, S.F.; Abbasi, F. Simulation of furrow irrigation using the Slow-change/slow-flow equation. Agric. Water Manag. 2013, 116, 160–174. [Google Scholar] [CrossRef]
- Akbari, M.; Gheysari, M.; Mostafazadeh-Fard, B.; Shayannejad, M. Surface irrigation simulation-optimization model based on meta-heuristic algorithms. Agric. Water Manag. 2018, 201, 46–57. [Google Scholar] [CrossRef]
- Khasraghi, M.M.; Sefidkouhi, M.A.G.; Valipour, M. Simulation of Open- and Closed-End Border Irrigation Systems Using SIRMOD. Arch. Agron. Soil Sci. 2015, 61, 929–941. [Google Scholar] [CrossRef]
- Chávez, C.; Fuentes, C. Design and evaluation of surface irrigation systems applying an analytical formula in the irrigation district 085, La Begoña, Mexico. Agric. Water Manag. 2019, 221, 279–285. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Liaghat, A. Field Evaluation of Various Mathematical Models for Furrow and Border Irrigation Systems. Soil Water Res. 2011, 6, 91–101. [Google Scholar] [CrossRef] [Green Version]
- Sayari, S.; Rahimpour, M.; Zounemat-Kermani, M. Numerical Modeling Based on a Finite Element Method for Simulation of Flow in Furrow Irrigation. Paddy Water Environ. 2017, 15, 879–887. [Google Scholar] [CrossRef]
- Singh, V.; Bhallamudi, S.M. Complete Hydrodynamic Border-Strip Irrigation Model. J. Irrig. Drain. Eng. 1996, 122, 189–197. [Google Scholar] [CrossRef]
- Strelkoff, T.; Katopodes, N.D. Border-Irrigation Hydraulics with Zero Inertia. J. Irrig. Drain. Div. 1977, 103, 325–342. [Google Scholar]
- Liu, K.H.; Jiao, X.Y.; Li, J.; An, Y.H.; Guo, W.H.; Salahou, M.K.; Sang, H. Performance of a Zero-Inertia Model for Irrigation with Rapidly Varied Inflow Discharges. Int. J. Agric. Biol. Eng. 2020, 13, 175–181. [Google Scholar] [CrossRef]
- Bautista, E.; Schlegel, J.L.; Clemmens, A.J. The SRFR 5 Modeling System for Surface Irrigation. J. Irrig. Drain. Eng. 2016, 142, 04015038. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, D.; Bai, M.; Li, Y.; Liu, Q. Fully Hydrodynamic Coupled Simulation of Surface Flows in Irrigation Furrow Networks. J. Irrig. Drain. Eng. 2016, 142, 04016014. [Google Scholar] [CrossRef]
- Brufau, P.; García-Navarro, P.; Playán, E.; Zapata, N. Numerical modeling of basin irrigation with an upwind scheme. J. Irrig. Drain. Eng. 2002, 128, 212–223. [Google Scholar] [CrossRef] [Green Version]
- Gillies, M.H.; Smith, R.J. SISCO: Surface irrigation simulation, calibration and optimization. Irrig. Sci. 2015, 33, 339–355. [Google Scholar] [CrossRef]
- Abbasi, F.; Shooshtari, M.M.; Feyen, J. Evaluation of various surface irrigation numerical simulation models. J. Irrig. Drain. Eng. 2003, 129, 208–213. [Google Scholar] [CrossRef]
- Zerihun, D.; Furman, A.; Warrick, A.W.; Sanchez, C.A. Coupled surface-subsurface flow model for improved basin irrigation management. J. Irrig. Drain. Eng. 2005, 131, 111–128. [Google Scholar] [CrossRef]
- Wöhling, T.; Fröhner, A.; Schmitz, G.H.; Liedl, R. Efficient Solution of the Coupled One-Dimensional Surface—Two-Dimensional Subsurface Flow during Furrow Irrigation Advance. J. Irrig. Drain. Eng. 2006, 132, 380–388. [Google Scholar] [CrossRef]
- Tabuada, M.A.; Rego, Z.J.C.; Vachaud, G.; Pereira, L.S. Modelling of Furrow Irrigation. Advance with Two-Dimensional Infiltration. Agric. Water Manag. 1995, 28, 201–221. [Google Scholar] [CrossRef]
- Woolhiser, D.A. Simulation of Unsteady Overland Flow. In Unsteady Flow in Open Channels; Water Resources Publications: Fort Collins, Colorado, 1975; Volume 2, pp. 485–508. [Google Scholar]
- Banti, M.; Zissis, T.; Anastasiadou-Partheniou, E. Furrow Irrigation Advance Simulation Using a Surface–Subsurface Interaction Model. J. Irrig. Drain. Eng. 2011, 137, 304–314. [Google Scholar] [CrossRef]
- Green, W.H.; Ampt, G.A. Studies on soil physics I: The flow of air and water through soils. J. Agric. Sci. 1911, 4, 1–24. [Google Scholar]
- Zatarain, F.; Fuentes, C.; Rendón, L.; Vauclin, M. Effective soil hydrodynamic properties in border irrigation. Ing. Hidraul. Mexico 2003, 18, 5–15. [Google Scholar]
- Fuentes, C.; Chávez, C. Analytic Representation of the Optimal Flow for Gravity Irrigation. Water 2020, 12, 2710. [Google Scholar] [CrossRef]
- Elliott, R.L.; Walker, W.R.; Skogerboe, G.V. Zero-Inertia Modeling of Furrow Irrigation Advance. J. Irrig. Drain. Div. 1982, 108, 179–195. [Google Scholar]
- Wallender, W.W.; Rayej, M. Shooting method for Saint Venant equations of furrow irrigation. J. Irrig. Drain. Eng. 1990, 116, 114–122. [Google Scholar] [CrossRef]
- Liu, K.; Huang, G.; Xu, X.; Xiong, Y.; Huang, Q.; Šimůnek, J. A Coupled Model for Simulating Water Flow and Solute Transport in Furrow Irrigation. Agric. Water Manag. 2019, 213, 792–802. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Xiong, Y.; Xu, X.; Huang, Q.; Huo, Z.; Huang, G. Modified Model for Simulating Water Flow in Furrow Irrigation. J. Irrig. Drain. Eng. 2020, 146, 06020002. [Google Scholar] [CrossRef]
- Saucedo, H.; Zavala, M.; Fuentes, C. Use of Saint-Venant and Green and Ampt equations to estimate infiltration parameters based on measurements of the water front advance in border irrigation. Water Technol. Sci. 2016, 7, 117–124. [Google Scholar]
- Walker, W.R.; Skogerboe, G.V. Surface Irrigation. Theory and Practice; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Strelkoff, T. EQSWP: Extended unsteady-flow double-sweep equation solver. J. Hydraul. Eng. 1992, 118, 735–742. [Google Scholar]
- USDA-NRCS. National Engineering Handbook, Part 652. In Irrigation Guide—USDA: Natural Resources Conservation Service; USDA-NRCS: Washington, DC, USA, 1997; p. 754. [Google Scholar]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Numerical Analysis; Springer: Berlin/Heidelberg, Germany, 1978; pp. 105–116. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| δt (s) | Computer Time (min) | R2 |
|---|---|---|
| 1.0 | 4.70 | 0.9978 |
| 1.5 | 2.10 | 0.9978 |
| 2.0 | 1.16 | 0.9978 |
| 5.0 | 0.21 | 0.9978 |
| 10.0 | 0.06 | 0.9978 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuentes, S.; Fuentes, C.; Saucedo, H.; Chávez, C. Border Irrigation Modeling with the Barré de Saint-Venant and Green and Ampt Equations. Mathematics 2022, 10, 1039. https://doi.org/10.3390/math10071039
Fuentes S, Fuentes C, Saucedo H, Chávez C. Border Irrigation Modeling with the Barré de Saint-Venant and Green and Ampt Equations. Mathematics. 2022; 10(7):1039. https://doi.org/10.3390/math10071039
Chicago/Turabian StyleFuentes, Sebastián, Carlos Fuentes, Heber Saucedo, and Carlos Chávez. 2022. "Border Irrigation Modeling with the Barré de Saint-Venant and Green and Ampt Equations" Mathematics 10, no. 7: 1039. https://doi.org/10.3390/math10071039
APA StyleFuentes, S., Fuentes, C., Saucedo, H., & Chávez, C. (2022). Border Irrigation Modeling with the Barré de Saint-Venant and Green and Ampt Equations. Mathematics, 10(7), 1039. https://doi.org/10.3390/math10071039