
A Neural Controller for Induction Motors: Fractional-Order Stability Analysis and Online Learning Algorithm

 , , ,
, , ,  ,
,  and
and
Abstract
:1. Introduction
- A new fractional-order intelligent control approach is introduced using the proposed GMDH-NN;
- The IM dynamics are unknown and are disturbed by different faults, such as the variation of the unknown load torque and uncertain rotor resistance;
- The closed-loop stability was investigated, and a compensator was constructed to eradicate the impacts of IM perturbations;
- Adaptive learning rules are presented for GMDH-NNs.
2. Problem Formulation
2.1. System Dynamics
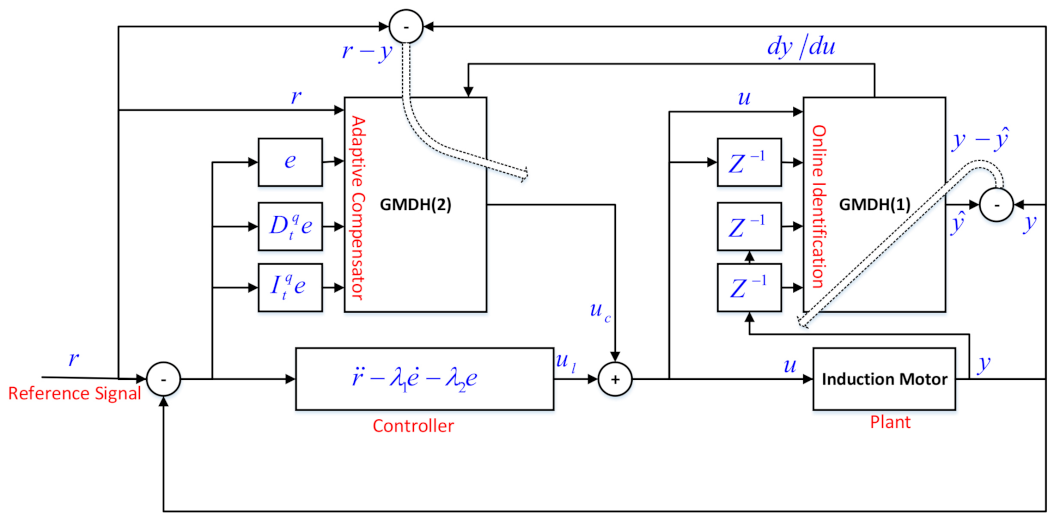
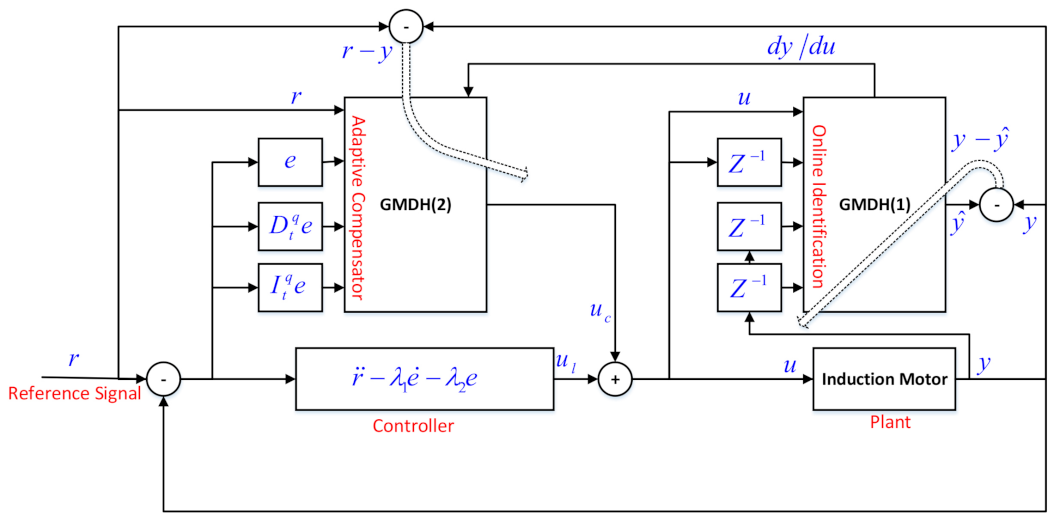
2.2. A General View of the Proposed Controller
3. Proposed GMDH Neural Network
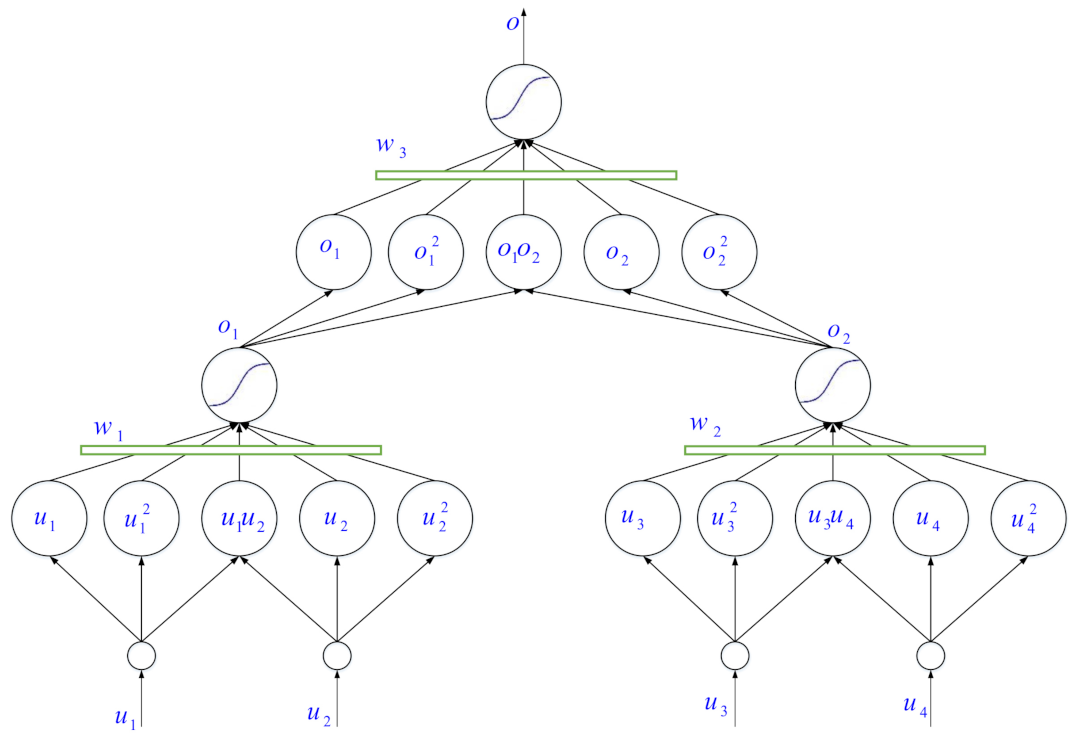
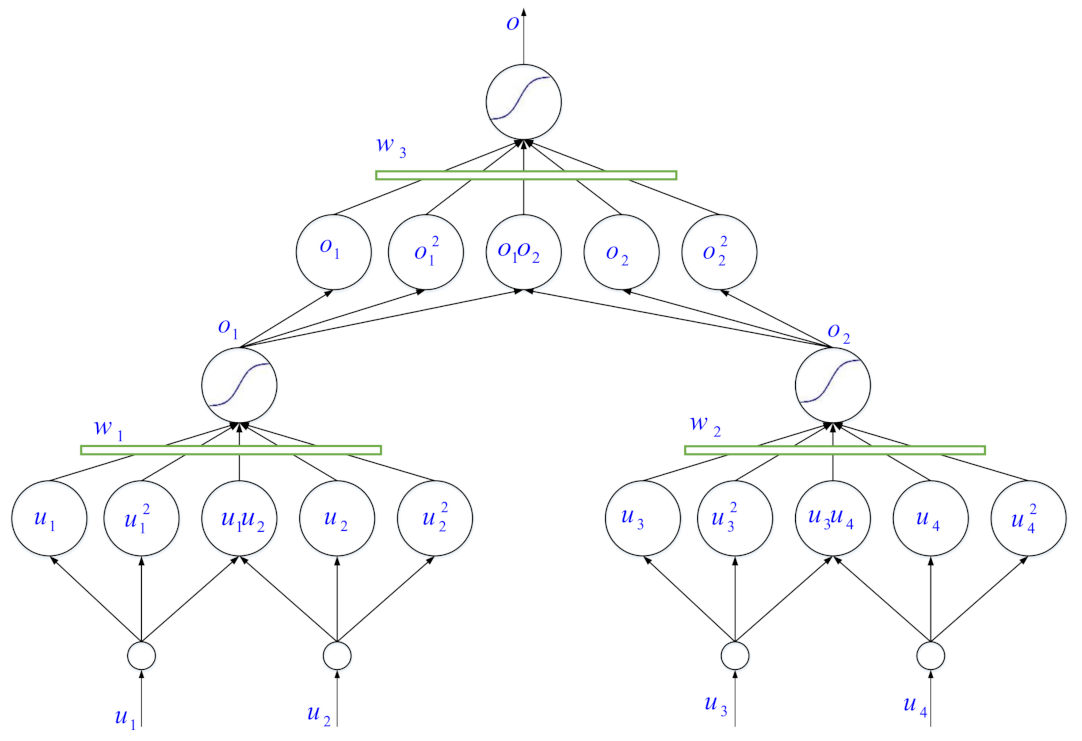
3.1. Structure
- Step 1:
- The vectors of the inputs for the GMDH(1) and GMDH(2) are and , respectively. One of the characteristics of the suggested controller is that it uses the minimum information of the system. To identify the dynamics of the IM, only the input–output datasets are used. It should be noted that by the use of the GMDH(1), we wanted to obtain the control direction;
- Step 2:
- Compute the outputs of the hidden layers for the GMDH(1) and GMDH(2) as follows:where / denotes the activation function in the first layer for the GMDH(1)/GMDH(2), which is defined as follows:The other parameters , , , and are computed as follows:where,
- Step 3:
3.2. Learning of the GMDH(1)
3.3. Learning of the GMDH(2)
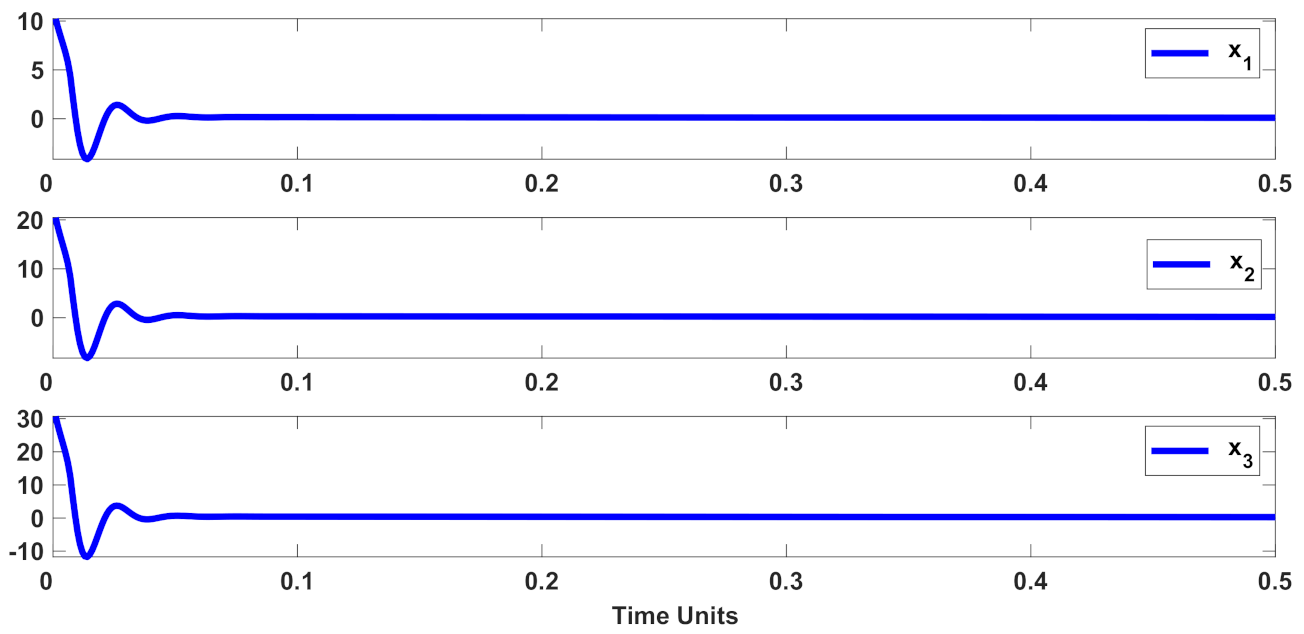
4. Stability Analysis
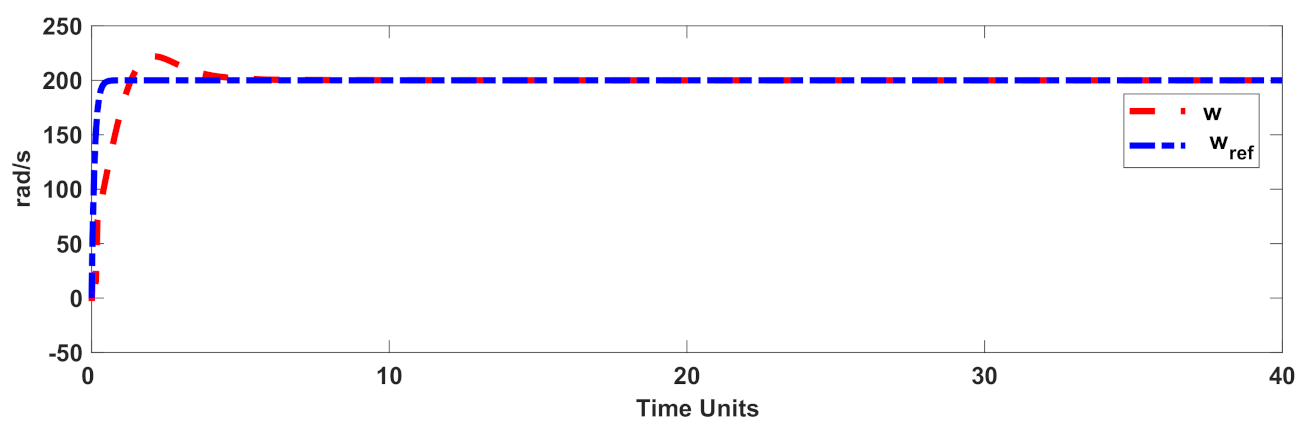
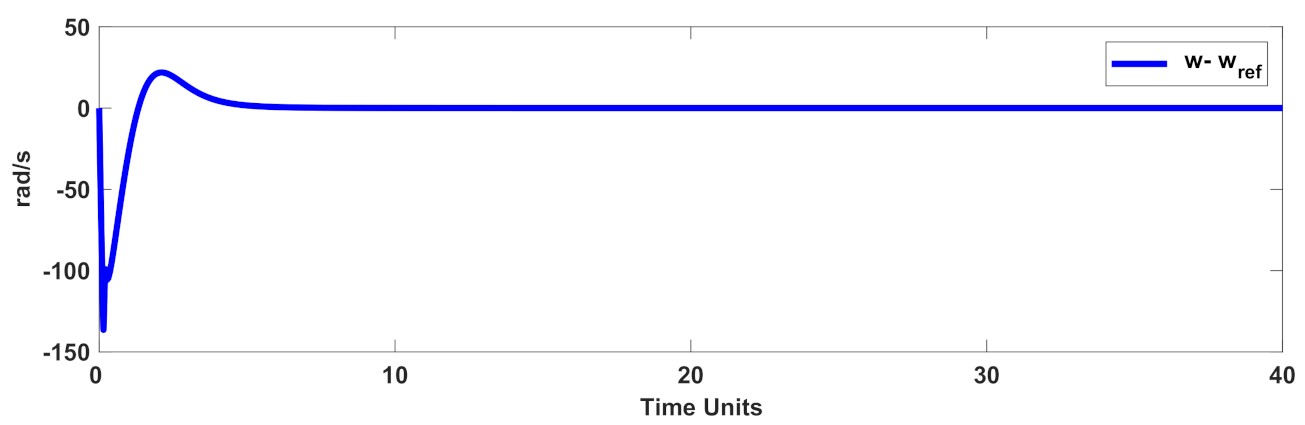
5. Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yin, H.; Yi, W.; Wu, J.; Wang, K.; Guan, J. Adaptive Fuzzy Neural Network PID Algorithm for BLDCM Speed Control System. Mathematics 2022, 10, 118. [Google Scholar] [CrossRef]
- Yin, H.; Yi, W.; Wang, K.; Guan, J.; Wu, J. Research on brushless DC motor control system based on fuzzy parameter adaptive PI algorithm. Aip Adv. 2020, 10, 105208. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Bizon, N. Improved Rotor Flux and Torque Control Based on the Third-Order Sliding Mode Scheme Applied to the Asynchronous Generator for the Single-Rotor Wind Turbine. Mathematics 2021, 9, 2297. [Google Scholar] [CrossRef]
- Alvarez-Ramirez, J.; Fernandez, G.; Suarez, R. A PI controller configuration for robust control of a class of nonlinear systems. J. Frankl. Inst. 2002, 339, 29–41. [Google Scholar] [CrossRef]
- Sharma, D.; Nandanwar, V. Performance of induction motor at low and high speed using model predictive control method. Int. J. Res. Sci. Eng. 2016, 3, 779–785. [Google Scholar]
- Yu, X.; Dunnigan, M.W.; Williams, B.W. Comparative study of sliding mode speed and position control of a vector-controlled induction machine. Trans. Inst. Meas. Control 2001, 23, 83–101. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Bizon, N. Third-Order Sliding Mode Applied to the Direct Field-Oriented Control of the Asynchronous Generator for Variable-Speed Contra-Rotating Wind Turbine Generation Systems. Energies 2021, 14, 5877. [Google Scholar] [CrossRef]
- Barambones, O.; Alkorta, P. A robust vector control for induction motor drives with an adaptive sliding-mode control law. J. Frankl. Inst. 2011, 348, 300–314. [Google Scholar] [CrossRef]
- Ammar, A.; Bourek, A.; Benakcha, A. Nonlinear SVM-DTC for induction motor drive using input–output feedback linearization and high order sliding mode control. ISA Trans. 2017, 67, 428–442. [Google Scholar] [CrossRef]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N. Fuzzy sliding mode control based on boundary layer theory for chattering-free and robust induction motor drive. Int. J. Adv. Manuf. Technol. 2014, 71, 57–68. [Google Scholar] [CrossRef]
- Salih, Z.H.; Gaeid, K.S.; Saghafinia, A. Sliding Mode Control of Induction Motor with Vector Control in Field Weakening. Mod. Appl. Sci. 2015, 9, 276. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Zhou, M.; Zheng, X.; Han, F.; Yu, X. Terminal sliding-mode control of induction motor speed servo systems. In Proceedings of the 2016 14th International Workshop on Variable Structure Systems (VSS), Nanjing, China, 1–4 June 2016; pp. 351–355. [Google Scholar]
- Li, J.; Ren, H.P.; Zhong, Y.R. Robust speed control of induction motor drives using first-order auto-disturbance rejection controllers. IEEE Trans. Ind. Appl. 2015, 51, 712–720. [Google Scholar] [CrossRef]
- Pohl, L.; Vesely, I. Speed Control of Induction Motor Using H∞ Linear Parameter Varying Controller. IFAC-PapersOnLine 2016, 49, 74–79. [Google Scholar] [CrossRef]
- Talla, J.; Leu, V.Q.; Šmídl, V.; Peroutka, Z. Adaptive Speed Control of Induction Motor Drive With Inaccurate Model. IEEE Trans. Ind. Electron. 2018, 65. [Google Scholar] [CrossRef]
- Li, R.; Yang, L.; Chen, Y.; Lai, G. Adaptive Sliding Mode Control of Robot Manipulators with System Failures. Mathematics 2022, 10, 339. [Google Scholar] [CrossRef]
- Yang, L.; Lai, G.; Chen, Y.; Guo, Z. Online Control for Biped Robot with Incremental Learning Mechanism. Appl. Sci. 2021, 11, 8599. [Google Scholar] [CrossRef]
- Fu, X.; Li, S. A novel neural network vector control technique for induction motor drive. IEEE Trans. Energy Convers. 2015, 30, 1428–1437. [Google Scholar] [CrossRef]
- Wang, S.Y.; Tseng, C.L.; Chiu, C.J. Design of a novel adaptive TSK-fuzzy speed controller for use in direct torque control induction motor drives. Appl. Soft Comput. 2015, 31, 396–404. [Google Scholar] [CrossRef]
- Yousef, H.; Hamdy, M.; El-Madbouly, E.; Eteim, D. Adaptive fuzzy decentralized control for interconnected MIMO nonlinear subsystems. Automatica 2009, 45, 456–462. [Google Scholar] [CrossRef]
- Kusagur, A.; Fakirappa Kodad, S.; Ram, S. Modelling & Simulation of an ANFIS controller for an AC drive. World J. Model. Simul. 2012, 8, 36–49. [Google Scholar]
- Ali, J.A.; Hannan, M.; Mohamed, A.; Abdolrasol, M.G. Fuzzy logic speed controller optimization approach for induction motor drive using backtracking search algorithm. Measurement 2016, 78, 49–62. [Google Scholar] [CrossRef]
- Vahedi, M.; Hadad Zarif, M.; Akbarzadeh Kalat, A. Speed control of induction motors using neuro-fuzzy dynamic sliding mode control. J. Intell. Fuzzy Syst. 2015, 29, 365–376. [Google Scholar] [CrossRef]
- Mahapatra, S.; Daniel, R.; Dey, D.N.; Nayak, S.K. Induction motor control using PSO-ANFIS. Procedia Comput. Sci. 2015, 48, 753–768. [Google Scholar] [CrossRef] [Green Version]
- Uddin, M.N.; Radwan, T.S.; Rahman, M.A. Performances of fuzzy-logic-based indirect vector control for induction motor drive. IEEE Trans. Ind. Appl. 2002, 38, 1219–1225. [Google Scholar] [CrossRef]
- Ivakhnenko, A.; Ivakhnenko, G. The review of problems solvable by algorithms of the group method of data handling (GMDH). Pattern Recognit. Image Anal. C/C Raspoznavaniye Obraz. Anal. Izobr. 1995, 5, 527–535. [Google Scholar]
- Band, S.S.; Mohammadzadeh, A.; Csiba, P.; Mosavi, A.; Varkonyi-Koczy, A.R. Voltage regulation for photovoltaics-battery-fuel systems using adaptive group method of data handling neural networks (GMDH-NN). IEEE Access 2020, 8, 213748–213757. [Google Scholar] [CrossRef]
- Panahi, M.; Rahmati, O.; Rezaie, F.; Lee, S.; Mohammadi, F.; Conoscenti, C. Application of the group method of data handling (GMDH) approach for landslide susceptibility zonation using readily available spatial covariates. Catena 2022, 208, 105779. [Google Scholar] [CrossRef]
- Koopialipoor, M.; Nikouei, S.S.; Marto, A.; Fahimifar, A.; Jahed Armaghani, D.; Mohamad, E.T. Predicting tunnel boring machine performance through a new model based on the group method of data handling. Bull. Eng. Geol. Environ. 2019, 78, 3799–3813. [Google Scholar] [CrossRef]
- Mohammadi, M.R.; Hemmati-Sarapardeh, A.; Schaffie, M.; Husein, M.M.; Ranjbar, M. Application of cascade forward neural network and group method of data handling to modeling crude oil pyrolysis during thermal enhanced oil recovery. J. Pet. Sci. Eng. 2021, 205, 108836. [Google Scholar] [CrossRef]
- Mikaeil, R.; Haghshenas, S.S.; Ozcelik, Y.; Gharehgheshlagh, H.H. Performance evaluation of adaptive neuro-fuzzy inference system and group method of data handling-type neural network for estimating wear rate of diamond wire saw. Geotech. Geol. Eng. 2018, 36, 3779–3791. [Google Scholar] [CrossRef]
- Naderpour, H.; Eidgahee, D.R.; Fakharian, P.; Rafiean, A.H.; Kalantari, S.M. A new proposed approach for moment capacity estimation of ferrocement members using Group Method of Data Handling. Eng. Sci. Technol. Int. J. 2020, 23, 382–391. [Google Scholar] [CrossRef]
- Mohebbian, M.R.; Dinh, A.; Wahid, K.; Alam, M.S. Blind, cuff-less, calibration-free and continuous blood pressure estimation using optimized inductive group method of data handling. Biomed. Signal Process. Control. 2020, 57, 101682. [Google Scholar] [CrossRef]
- Walton, R.; Binns, A.; Bonakdari, H.; Ebtehaj, I.; Gharabaghi, B. Estimating 2-year flood flows using the generalized structure of the Group Method of Data Handling. J. Hydrol. 2019, 575, 671–689. [Google Scholar] [CrossRef]
- Hemmati-Sarapardeh, A.; Hajirezaie, S.; Soltanian, M.R.; Mosavi, A.; Nabipour, N.; Shamshirband, S.; Chau, K.W. Modeling natural gas compressibility factor using a hybrid group method of data handling. Eng. Appl. Comput. Fluid Mech. 2020, 14, 27–37. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, A.; Mishra, P.; Goyal, V. A Novel Augmented Fractional-Order Fuzzy Controller for Enhanced Robustness in Nonlinear and Uncertain Systems with Optimal Actuator Exertion. Arab. J. Sci. Eng. 2021, 46, 10185–10204. [Google Scholar] [CrossRef]
- Chang, Y.H.; Wu, C.I.; Chen, H.C.; Chang, C.W.; Lin, H.W. Fractional-order integral sliding-mode flux observer for sensorless vector-controlled induction motors. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 190–195. [Google Scholar]
- Ebrahimkhani, S. Robust fractional order sliding mode control of doubly-fed induction generator (DFIG)-based wind turbines. Isa Trans. 2016, 63, 343–354. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Mira, F.J.; Pelissier, I.S.; Travieso-Torres, J.C. Evaluation of a fractional order PI controller applied to induction motor speed control. In Proceedings of the IEEE ICCA 2010, Xiamen, China, 9–11 June 2010; pp. 573–577. [Google Scholar]
- Vahedpour, M.; Noei, A.R.; Kholerdi, H.A. Comparison between performance of conventional, fuzzy and fractional order PID controllers in practical speed control of induction motor. In Proceedings of the 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; pp. 912–916. [Google Scholar]
- Jalloul, A.; Trigeassou, J.C.; Jelassi, K.; Melchior, P. Fractional order modeling of rotor skin effect in induction machines. Nonlinear Dyn. 2013, 73, 801–813. [Google Scholar] [CrossRef]
- Coronel-Escamilla, A.; Torres, F.; Gómez-Aguilar, J.; Escobar-Jiménez, R.; Guerrero-Ramírez, G. On the trajectory tracking control for an SCARA robot manipulator in a fractional model driven by induction motors with PSO tuning. Multibody Syst. Dyn. 2018, 43, 257–277. [Google Scholar] [CrossRef]
- Khurram, A.; Rehman, H.; Mukhopadhyay, S.; Ali, D. Comparative analysis of integer-order and fractional-order proportional integral speed controllers for induction motor drive systems. J. Power Electron. 2018, 18, 723–735. [Google Scholar]
- Zaihidee, F.M.; Mekhilef, S.; Mubin, M. Application of fractional order sliding mode control for speed control of permanent magnet synchronous motor. IEEE Access 2019, 7, 101765–101774. [Google Scholar] [CrossRef]
- Demirtas, M.; Ilten, E.; Calgan, H. Pareto-Based Multi-objective Optimization for Fractional Order PIλ Speed Control of Induction Motor by Using Elman Neural Network. Arab. J. Sci. Eng. 2019, 44, 2165–2175. [Google Scholar] [CrossRef]
- Hsu, C.H. Fractional Order PID Control for Reduction of Vibration and Noise on Induction Motor. IEEE Trans. Magn. 2019, 55, 1–7. [Google Scholar] [CrossRef]
- Sabzalian, M.H.; Mohammadzadeh, A.; Lin, S.; Zhang, W. A robust control of a class of induction motors using rough type-2 fuzzy neural networks. Soft Comput. 2019, 24, 9809–9819. [Google Scholar] [CrossRef]
- Fekih, A. Effective fault tolerant control design for nonlinear systems: Application to a class of motor control system. Iet Control. Theory Appl. 2008, 2, 762–772. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Shaghaghi, S.; Bonakdari, H.; Gholami, A.; Ebtehaj, I.; Zeinolabedini, M. Comparative analysis of GMDH neural network based on genetic algorithm and particle swarm optimization in stable channel design. Appl. Math. Comput. 2017, 313, 271–286. [Google Scholar] [CrossRef]
- Yeh, Y.L.; Yang, P.K. Design and Comparison of Reinforcement-Learning-Based Time-Varying PID Controllers with Gain-Scheduled Actions. Machines 2021, 9, 319. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L.; Ouyang, H.; Zhang, G. Sway and disturbance rejection control for varying rope tower cranes suffering from friction and unknown payload mass. Nonlinear Dyn. 2021, 105, 3149–3165. [Google Scholar] [CrossRef]
- Radac, M.B.; Precup, R.E. Three-level hierarchical model-free learning approach to trajectory tracking control. Eng. Appl. Artif. Intell. 2016, 55, 103–118. [Google Scholar] [CrossRef]
- Dong, C.; Brandstetter, P.; Vo, H.H.; Tran, T.C.; Vo, D.H. Adaptive Sliding Mode Controller for Induction Motor. In International Conference on Advanced Engineering Theory and Applications, Proceedings of the AETA 2016: AETA 2016: Recent Advances in Electrical Engineering and Related Sciences; Springer: Berlin/Heidelberg, Germany, 2016; pp. 543–553. [Google Scholar]
- Masumpoor, S.; Yaghobi, H.; Khanesar, M.A. Adaptive sliding-mode type-2 neuro-fuzzy control of an induction motor. Expert Syst. Appl. 2015, 42, 6635–6647. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Ghaemi, S. Optimal synchronization of fractional-order chaotic systems subject to unknown fractional order, input nonlinearities and uncertain dynamic using type-2 fuzzy CMAC. Nonlinear Dyn. 2017, 88, 2993–3002. [Google Scholar] [CrossRef]
- Valerio, D. Toolbox ninteger for Matlab, v. 2.3. 2005. Available online: http://web.ist.utl.pt/duarte.valerio/ninteger/ninteger.htm (accessed on 6 February 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| 1.20 | ||
| 0.1569 | H | |
| 5 | ||
| - | 1480 | |
| 0.15 | H | |
| 0.1555 | H | |
| 2 | - | |
| J | 0.013 | |
| 1.1 |
| , | q | |||
|---|---|---|---|---|
| see (9) | see (Figure 1) | see (20) and (34) | see (16) | see (16) |
| 50 | 0.9 | 0.1 | 100 | −100 |
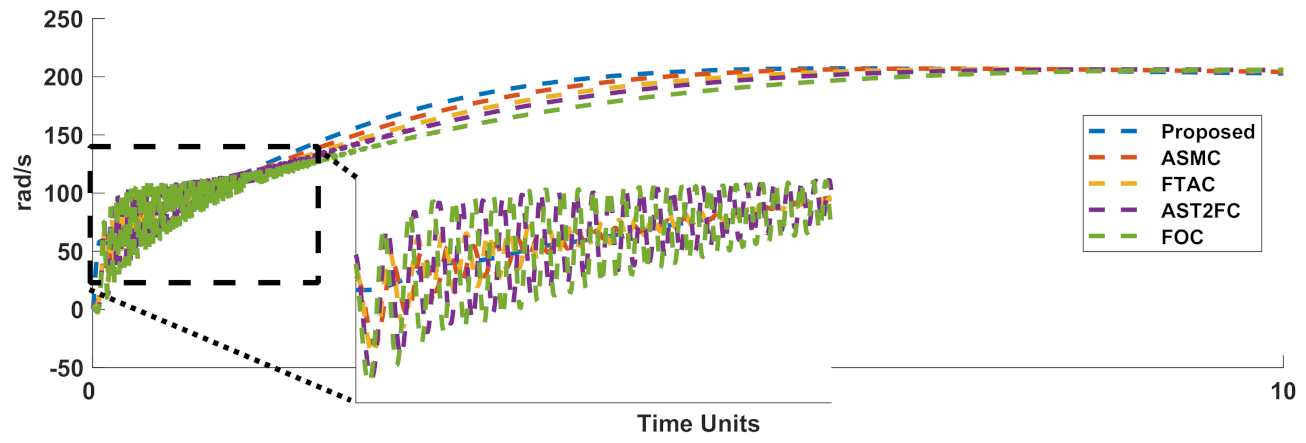
| FOC [48] | FTAC [48] | AST2FC [55] | ASMC [54] | Proposed Controller | |
|---|---|---|---|---|---|
| RMSE | 45.11 | 40.55 | 41.52 | 36.34 | 12.8085 |
| ISE | 4.5178 × 104 | 3.87124 × 104 | 3.78101 × 104 | 3.1427 × 104 | 1.1972 × 104 |
| q | 0.5 | 0.7 | 0.8 | 0.9 | 0.95 |
| RMSE | 12.8284 | 12.8278 | 12.8217 | 12.8085 | 12.8203 |
| Without Compensator | MLP | T1FS | GMDH | |
|---|---|---|---|---|
| w | 696.8100 | 13.3709 | 13.10 | 12.8085 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabzalian, M.H.; Alattas, K.A.; El-Sousy, F.F.M.; Mohammadzadeh, A.; Mobayen, S.; Vu, M.T.; Aredes, M. A Neural Controller for Induction Motors: Fractional-Order Stability Analysis and Online Learning Algorithm. Mathematics 2022, 10, 1003. https://doi.org/10.3390/math10061003
Sabzalian MH, Alattas KA, El-Sousy FFM, Mohammadzadeh A, Mobayen S, Vu MT, Aredes M. A Neural Controller for Induction Motors: Fractional-Order Stability Analysis and Online Learning Algorithm. Mathematics. 2022; 10(6):1003. https://doi.org/10.3390/math10061003
Chicago/Turabian StyleSabzalian, Mohammad Hosein, Khalid A. Alattas, Fayez F. M. El-Sousy, Ardashir Mohammadzadeh, Saleh Mobayen, Mai The Vu, and Mauricio Aredes. 2022. "A Neural Controller for Induction Motors: Fractional-Order Stability Analysis and Online Learning Algorithm" Mathematics 10, no. 6: 1003. https://doi.org/10.3390/math10061003
APA StyleSabzalian, M. H., Alattas, K. A., El-Sousy, F. F. M., Mohammadzadeh, A., Mobayen, S., Vu, M. T., & Aredes, M. (2022). A Neural Controller for Induction Motors: Fractional-Order Stability Analysis and Online Learning Algorithm. Mathematics, 10(6), 1003. https://doi.org/10.3390/math10061003