
ActressMAS, a .NET Multi-Agent Framework Inspired by the Actor Model


Abstract
:1. Introduction
2. Related Work
- Social simulations: the study of population dynamics, the evolution of social corruption, or models of civil violence;
- Mobility simulations: traffic situations with the goal of analyzing traffic jams, adaptive traffic lights, route choice, mobility planning systems, urban planning based on accessibility studies with dynamic populations, microscopic models of pedestrian crowds and evacuation of buildings, or air traffic control;
- Physical entities: robots and autonomous vehicles (cars, drones) seen as agents;
- Environment and ecosystems: simulations in ecology, biology, climate models, human and nature interaction (sometimes using geographic information systems), epidemiology (the spread of infections or diseases);
- Organizational simulations: planning and scheduling, enterprise and organizational behavior, workflow simulations;
- Economic studies: business, marketing, economics, e.g., price forecasting in real-world markets;
- Medical applications: personalized healthcare or hospital management;
- Industrial simulations: manufacturing and production, including the use of holons;
- Military applications: military combat simulations, air defense scenarios;
- Distributed computing, e.g., in cloud computing, virtualized data centers, large-scale parallel or distributed computing clusters and high performance supercomputers;
- Games or movie-making.
3. Theoretical Aspects: Actors and Agents
4. ActressMAS Architecture
4.1. Fundamental Features
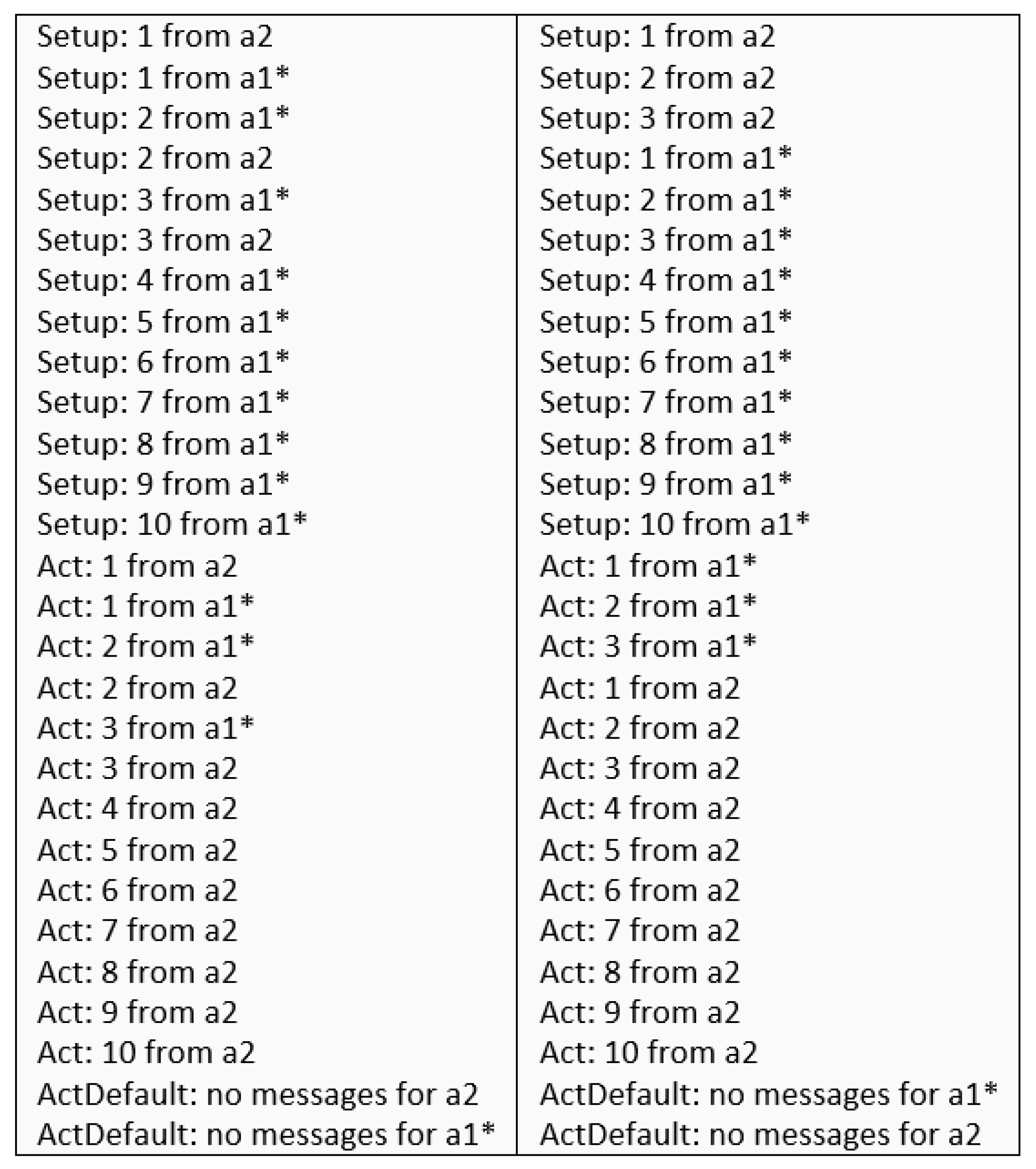
| public classProgram { private static void Main(string[] args) { var env = new EnvironmentMas(); var a1 = new Agent1(); env.Add(a1, “a1”); var a2 = new Agent2(); env.Add(a2, “a2”); env.Start(); } } |
| public classAgent1: Agent { public override void Setup() { for (int i = 0; i < 10; i++) { Console.WriteLine($“Setup: {i + 1} from a1*”); Thread.Sleep(100); } Send(“a2”, “msg”); } public override void Act(Message message) { for (int i = 0; i < 3; i++) { Console.WriteLine($“Act: {i + 1} from a1*”); Thread.Sleep(100); } } public override void ActDefault() { Console.WriteLine(“ActDefault: no messages for a1*”); Stop(); } } |
| public classAgent2: Agent { public override void Setup() { for (int i = 0; i < 3; i++) { Console.WriteLine($“Setup: {i + 1} from a2”); Thread.Sleep(100); } Send(“a1”, “msg”); } public override void Act(Message message) { for (int i = 0; i < 10; i++) { Console.WriteLine($"Act: {i + 1} from a2"); Thread.Sleep(100); } } public override void ActDefault() { Console.WriteLine("ActDefault: no messages for a2"); Stop(); } } |
| var env = new EnvironmentMas(parallel: false); |
| var env = new EnvironmentMas(randomOrder:false, parallel: false); |
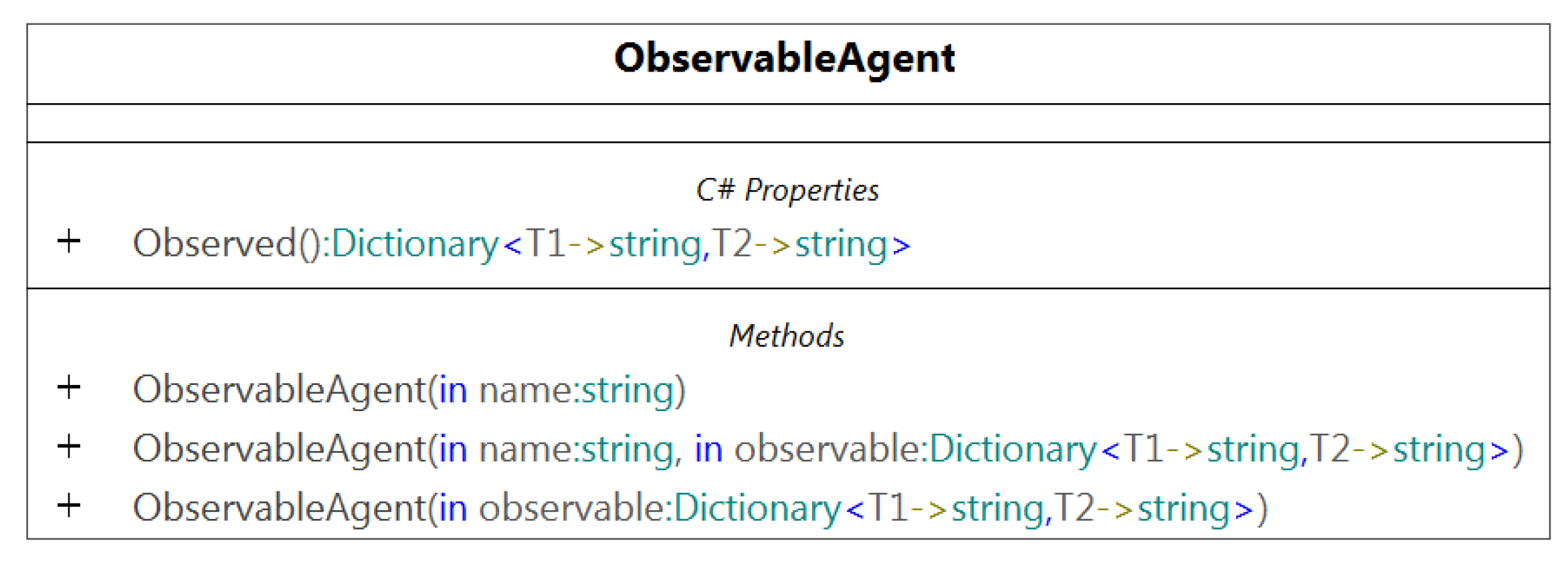
4.2. Observable Properties
| public classProgram { public static void Main(string[] args) { var env = new EnvironmentMas(noTurns: 10, randomOrder: false, parallel: false); var a1 = new MyAgent(); a1.UsingObservables = true; env.Add(a1, “Agent1”); var a2 = new MyAgent(); a2.UsingObservables = true; env.Add(a2, “Agent2”); var a3 = new MyAgent(); a3.UsingObservables = true; env.Add(a3, “Agent3”); env.Start(); } } |
| public classMyAgent: Agent { privateList<ObservableAgent> _observableAgents = null; public override void Setup() { Observables[“Name”] = Name; Observables[“Number”] = $“{Numbers.GenerateNumber():F2}”; } public override bool PerceptionFilter(Dictionary<string, string> observed) { double myNumber = Convert.ToDouble(Observables[“Number”]); double obsNumber = Convert.ToDouble(observed["Number"]); return (Math.Abs(myNumber − obsNumber) < 10); } public override void See(List<ObservableAgent> observableAgents) { _observableAgents = observableAgents; } public override void ActDefault() { Console.Write($“I am {Name}. ”); if (_observableAgents == null || _observableAgents.Count == 0) Console.WriteLine(“I didn’t see anything interesting.”); else { Console.WriteLine($“My number is {Observables[“Number”]} and I saw:”); foreach (var oa in _observableAgents) Console.WriteLine( $“{oa.Observed[“Name”]} with number = {oa.Observed[“Number”]}”); } Observables[“Number”] = $“{Numbers.GenerateNumber():F2}”; Console.WriteLine($“My number is now {Observables[“Number”]}”); Console.WriteLine("-----------------------------------------------------------"); } } |
| public classNumbers { private static Random_rand = new Random(); public static double GenerateNumber() => _rand.NextDouble() * 30; } |
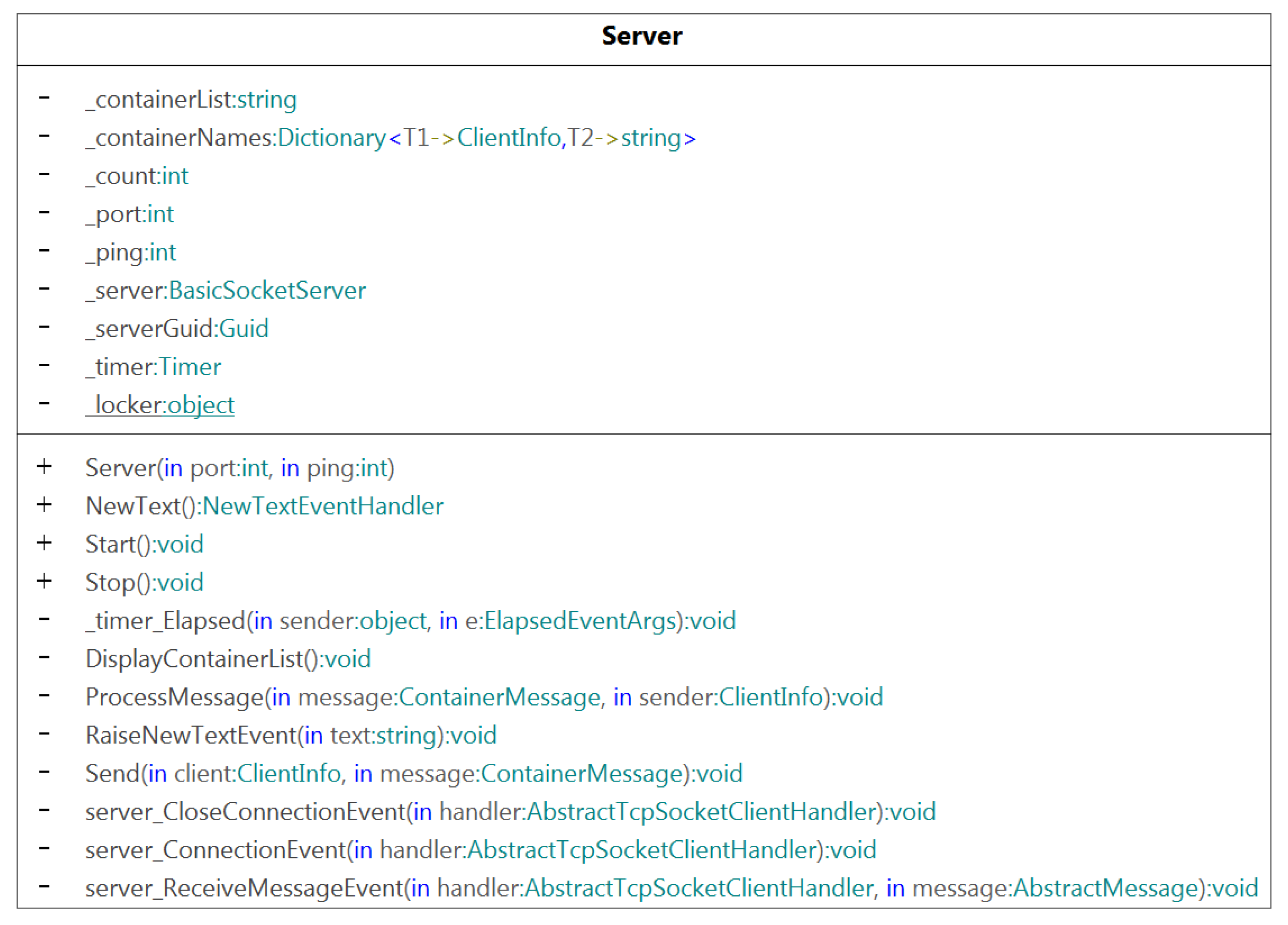
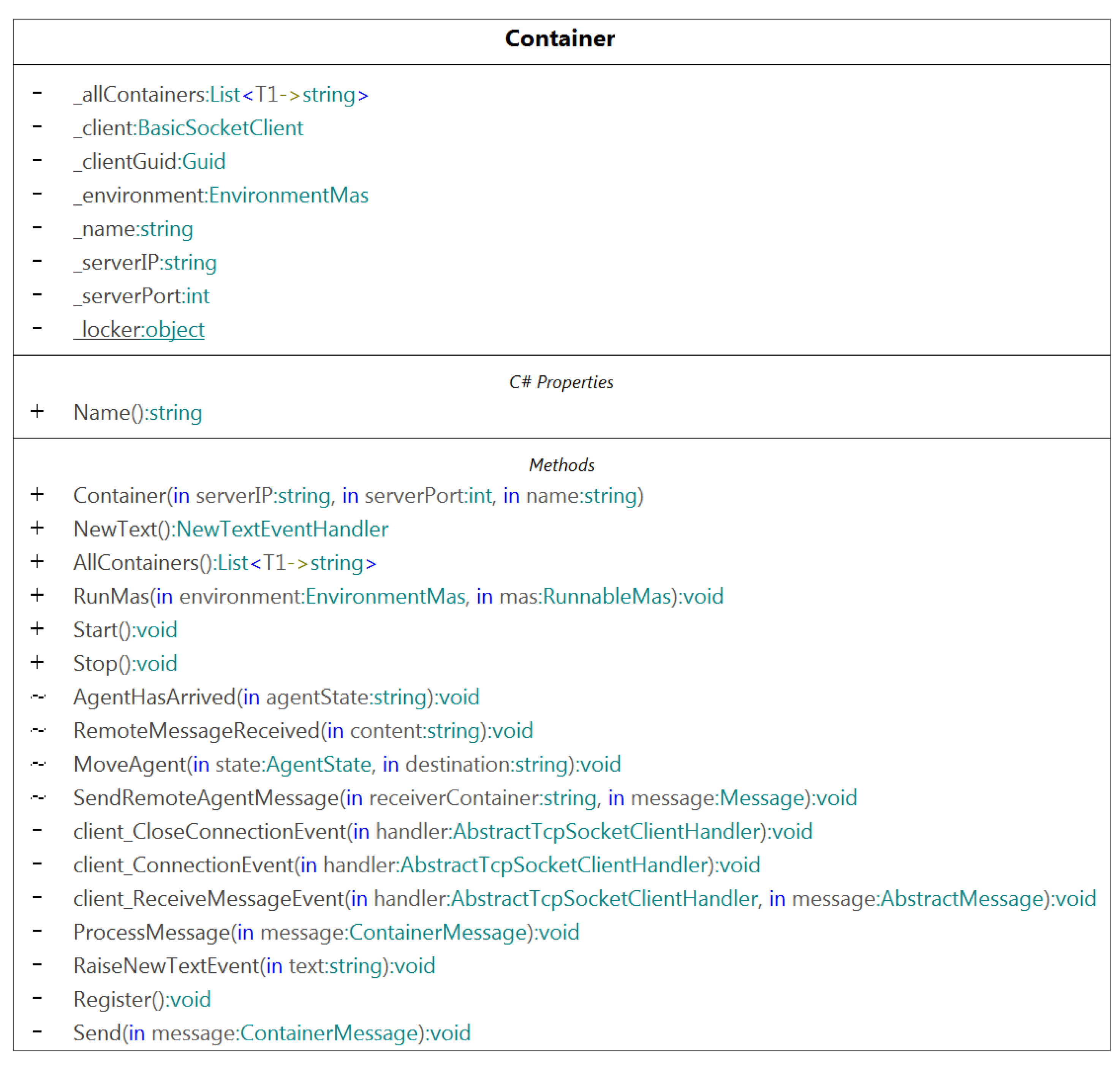
4.3. Mobile Agents
| public static class Program { private static void Main() { var server = new Server(5000, 3000); Console.WriteLine("Server listening on port 5000."); server.NewText += server_NewText; server.Start(); Console.WriteLine(“Press ENTER to close the server.”); Console.ReadLine(); server.Stop(); } private static void server_NewText(object source, NewTextEventArgs e) { if (e.Text.StartsWith(“Containers:”)) { Console.Clear(); Console.WriteLine(e.Text); } } } |
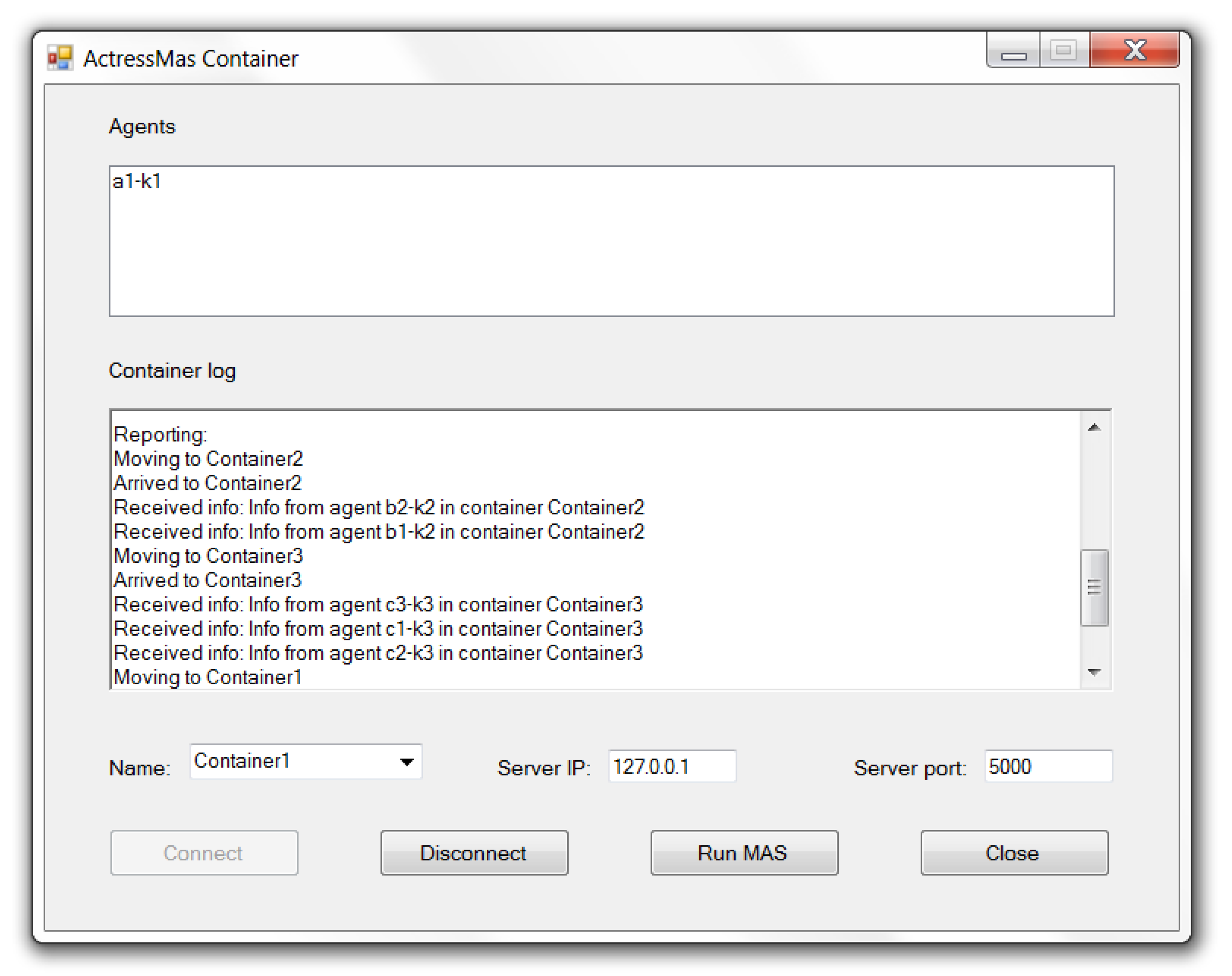
| private void buttonStart_Click(object sender, EventArgs e) { _container = new Container(_serverIP, Convert.ToInt32(_serverPort), _containerName); _container.Start(); } private void buttonRunMas_Click(object sender, EventArgs e) { _environment = new EnvironmentMas(); _container.RunMas(_environment, new MasSetup()); } private void buttonDisconnect_Click(object sender, EventArgs e) { if (_container != null) _container.Stop(); } |
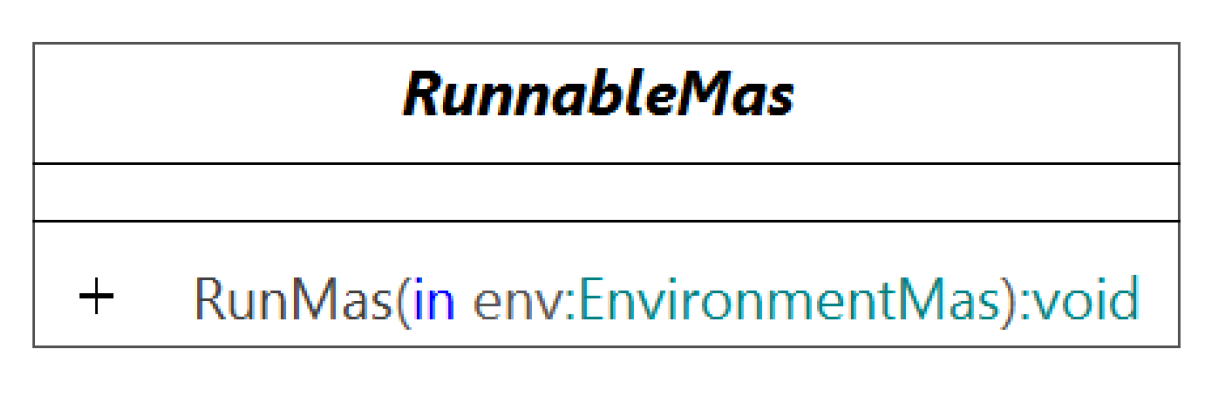
| public classMasSetup: RunnableMas { public override void RunMas(EnvironmentMas env) { string home = env.ContainerName; switch (home) { case “Container1”: // create a mobile agent and a static agent and add them to the environment env break; case “Container2”: // create two static agents and add them to the environment break; case “Container3”: // create three static agents and add them to the environment break; } env.Start(); } } |
| public classMobileAgent: Agent { private string _log; // stores the pieces of information received from the static agents private Queue<string> _moves; // the path to follow when moving between containers private bool _firstStart = true; private int _turnsToWaitForInfo; public override void Setup() { if (_firstStart) // Setup is also called when arriving to a new container { _firstStart = false; _moves = new Queue<string>(); foreach (string cn in Environment.AllContainers()) if (cn != Environment.ContainerName) // home _moves.Enqueue(cn); // return home, get local info and report _moves.Enqueue(Environment.ContainerName); } else { // the agent has moved to Environment.ContainerName Broadcast(“request-info”); _turnsToWaitForInfo = 3; } } public override void Act(Message message) { _log += $“Received info: {message.Content}\r\n”; // info from static agents } public override void ActDefault() { if (_turnsToWaitForInfo-- > 0) return; if (_moves.Count > 0) { string nextDestination = _moves.Dequeue(); // checks whether the destination container is still active if (CanMove(nextDestination)) { _log += $“Moving to {nextDestination}\r\n”; Move(nextDestination); return; } } _log += “Stopping\r\n”; Stop(); } } |
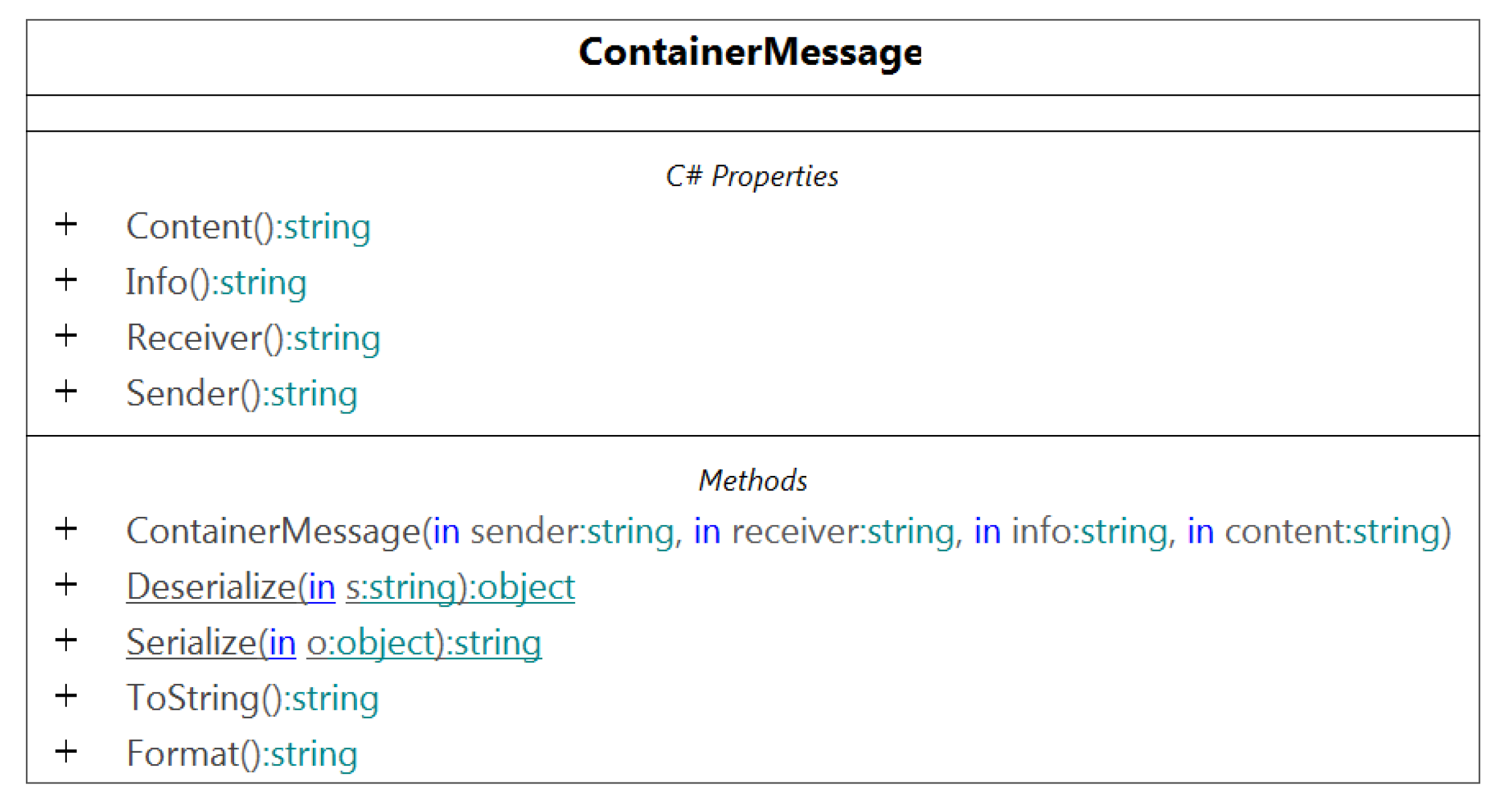
| public classStaticAgent: Agent { private string _info; // the piece of information it reports public override void Setup() { _info = $“Info from agent {Name} in container {Environment.ContainerName}”; } public override void Act(Message message) { if (message.Content == “request-info”) Send(message.Sender, _info); } } |
| public classMobileAgent: Agent { ... public override AgentState SaveState() { return new MobileAgentState { FirstStart = _firstStart, Log = _log, Moves = _moves }; } public override void LoadState(AgentState state) { var st = (MobileAgentState)state; _firstStart = st.FirstStart; _log = st.Log; _moves = st.Moves; } } [Serializable] public class MobileAgentState: AgentState { public bool FirstStart; public string Log; public Queue<string> Moves; } |
5. Performance for Some Benchmark Problems
6. Discussion
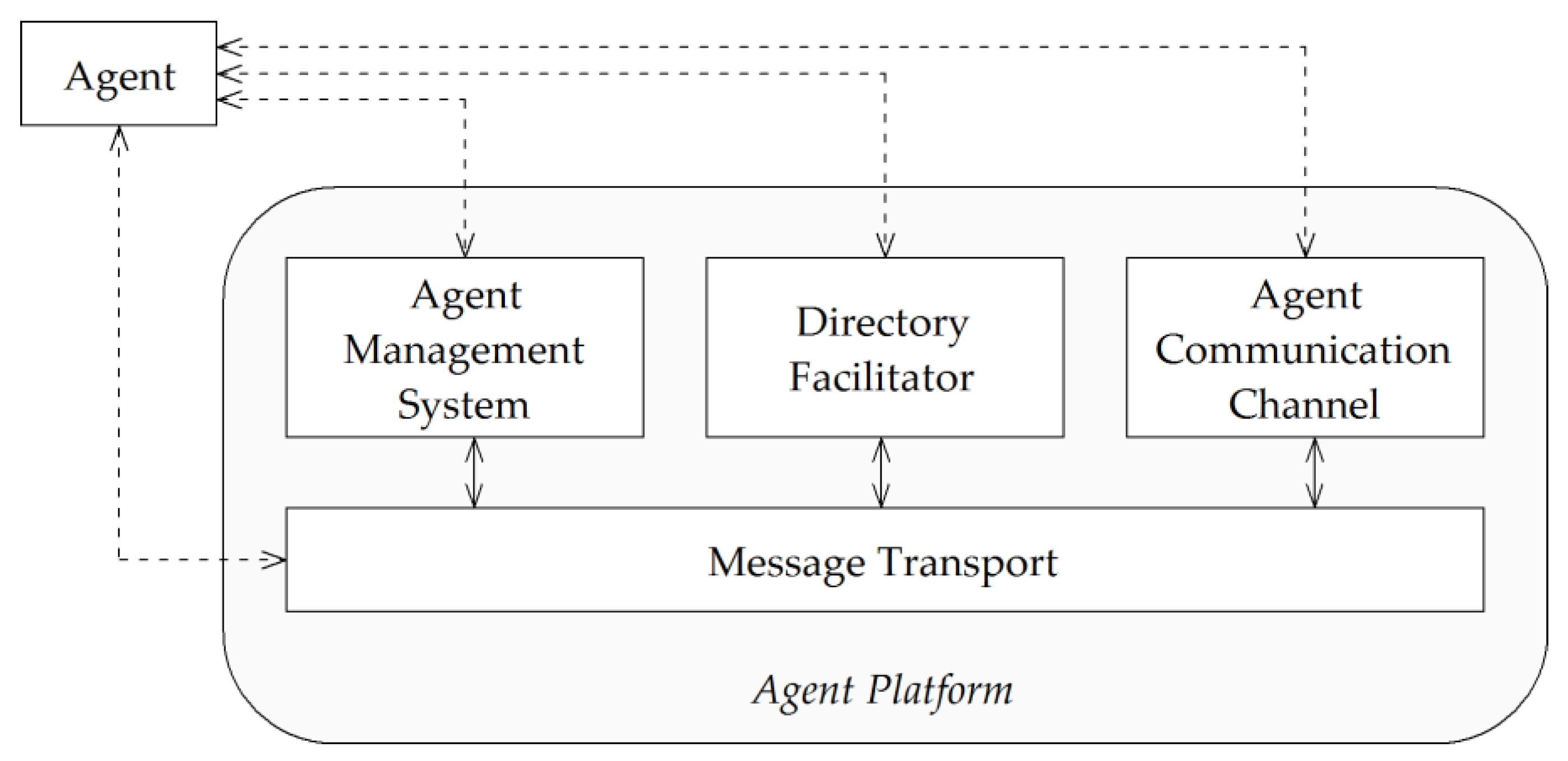
6.1. Relationship with FIPA Standards
6.2. Analysis of ActressMAS in Comparison with Other Multi-Agent Frameworks
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project Name | Purpose and Learning Points |
|---|---|
| Simple Examples→Agents1, Agents2, Agents3, Agents4, Agents5 | These examples show how agents should be created in ActressMAS and how to set up the environment. They show different possible execution types: parallel or sequential. The main focus is on sending messages and processing them in the Act method. The use of ActDefault method at the end of a turn with no received messages is also presented. |
| Simple Examples→ MultipleMessages | It shows a system where messages are exchanged between several worker agents and a manager agent in a way that would make it difficult for some messages to be delivered if the message passing infrastructure were not properly designed. This is also a test case for ActressMAS. |
| Simple Examples→ SendingObjects | It shows how user-defined objects can be directly sent in the content of messages. |
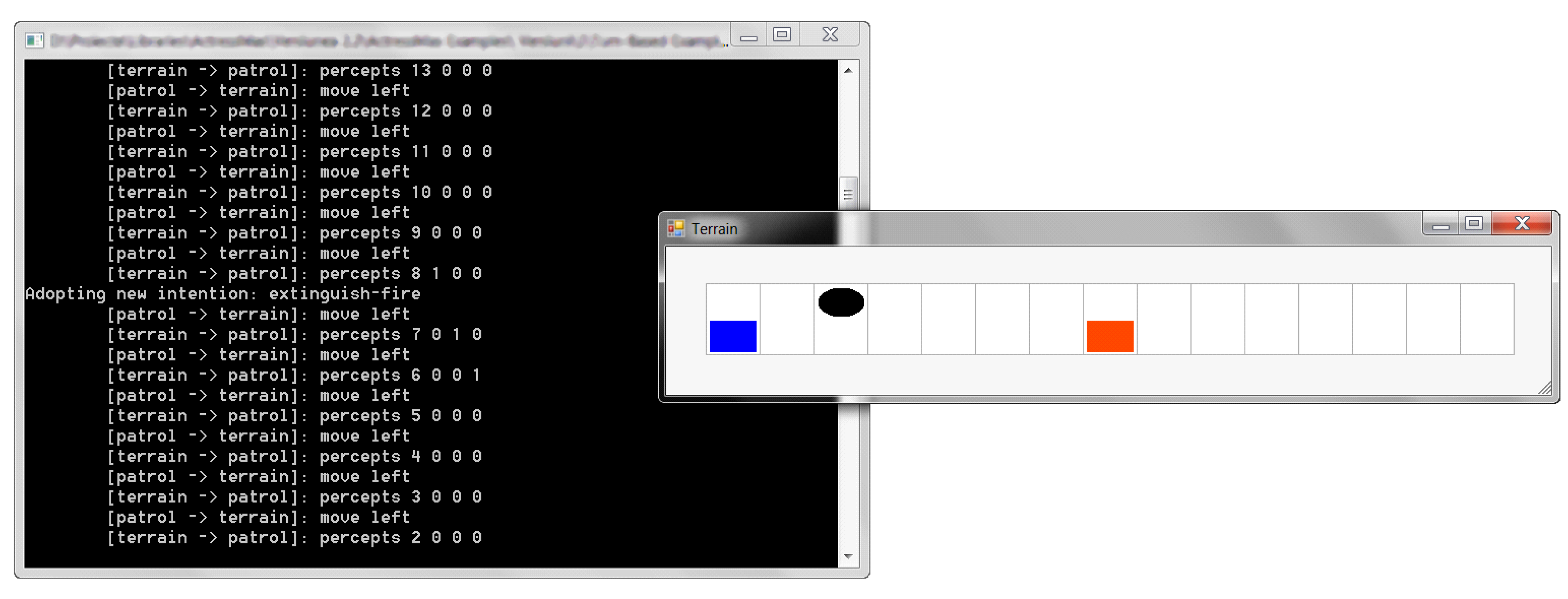
| Reactive Architecture | It presents an implementation of the reactive architecture where multiple behaviors can be activated based on the current state of the agent. The behaviors have priority levels, such that only the behavior with the highest priority defines the next action. |
| BDI Architecture | It presents an implementation of the Belief-Desire-Intention (BDI) architecture, where agents have explicit state information (beliefs), can have goals (desires) and make plans to achieve these goals (intentions). |
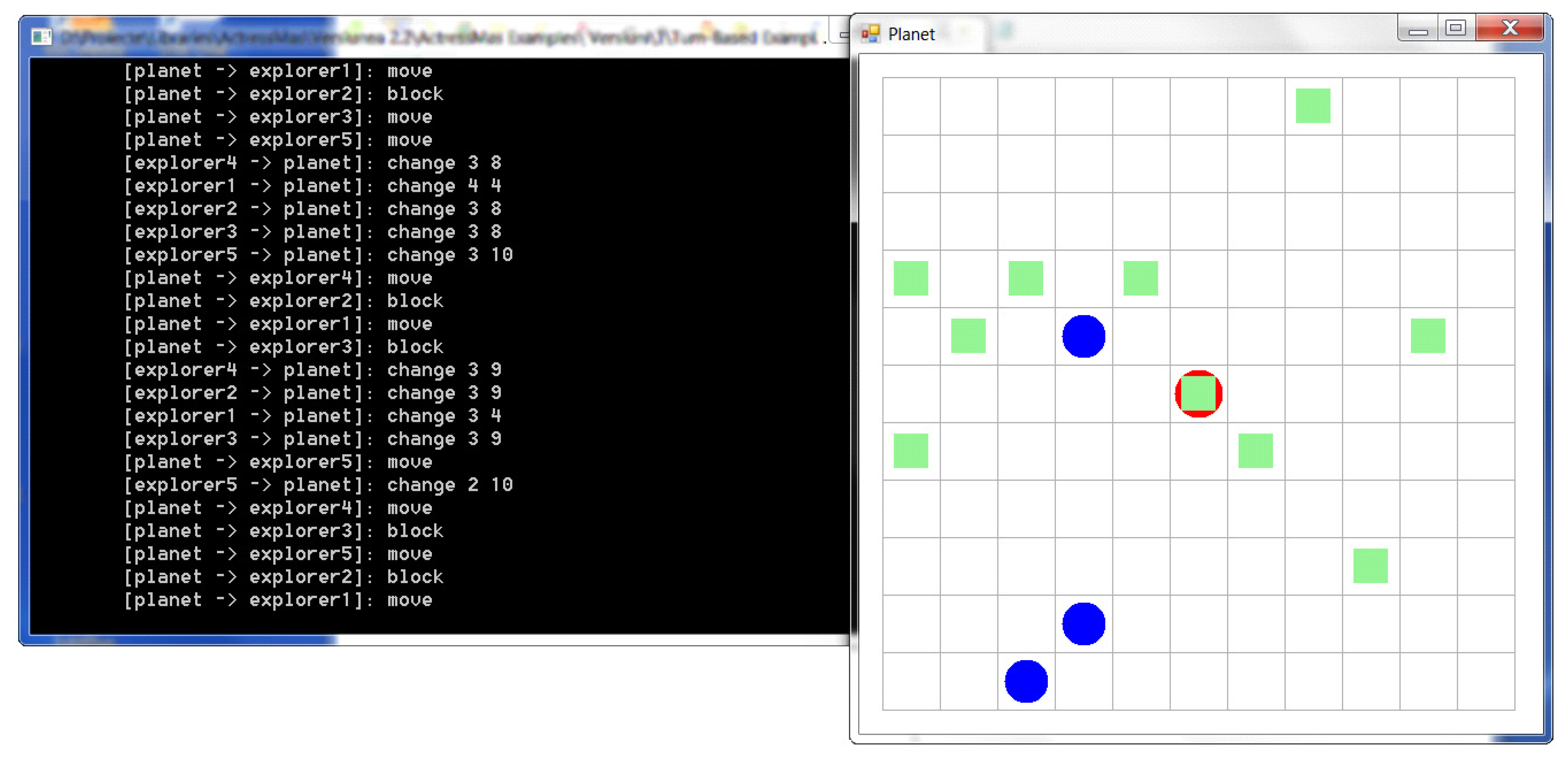
| LRTA Search | It presents an implementation of the Learning Real-Time A* (LRTA*) path finding algorithm. The search is designed as a continuous conversation between the search agent and the map agent, where the search agent is informed in each state about the neighboring states and the value of the heuristic function in that state. It reflects the behavior of an agent that discovers the map dynamically while performing the search. |
| Shapley Value | It presents a multi-agent system with worker agents with different skill values solving tasks with different difficulty levels. They divide their payoffs according to their marginal contributions to solving the tasks, using the game theoretic solution concept of the Shapley value. |
| Auctions→English with broadcast, English without broadcast | These projects implement the English auction protocol in two variants: when all the bids are broadcast to all the agents and when the bidders communicate only with the auctioneer, which in turn communicates the current best price after each round of bids. |
| Auctions→Vickrey | It implements the Vickrey auction, a sealed-bid protocol where the highest bidder is the winner but pays the second price. The dominant strategy of this auction protocol is bidding the true valuation, thus no agent has a motivation to bid a higher or a lower amount. |
| Yellow Pages | It presents a multi-agent system with service providers, clients (service consumers) and a service broker. Service providers can register or deregister at any time. This is the functionality envisioned by the FIPA Directory Facilitator. |
| Zeuthen Strategy | It implements the Zeuthen bargaining strategy based on the risks of breaking down the negotiation. The agent that has more to lose if the negotiation fails should be more willing to concede. At each step, the agent with a smaller risk needs to make a concession big enough to change the balance of risks, such that the other agent should concede in the next round. |
| Contract Net Protocol | It implements the FIPA specification for the contract net protocol. The agents communicate by messages that conform to the FIPA ACL structure. This example features some virtual postmen that should deliver letters and may exchange some of them in order to optimize their routes. Thus, it includes a heuristic travelling salesman problem solver as a subcomponent. The contract net protocol is used to find the (near-)optimal task allocation in terms of payoffs associated with letter delivery and the costs associated with tour length. |
| Mechanism Design | It implements the Clarke–Groves tax system which eliminates the incentive of an agent to lie about its true preference in a majority voting scenario. |
| Iterated Prisoner Dilemma | It implements the iterated prisoner dilemma game, which is a simple model that reveals deep questions related to human selfishness and cooperation. It includes multiple response strategies whose outcomes can be compared: acting randomly, always defecting, and “tit-for-tat” (where an agent first cooperates, then chooses the action chosen by the other agent in the previous round). |
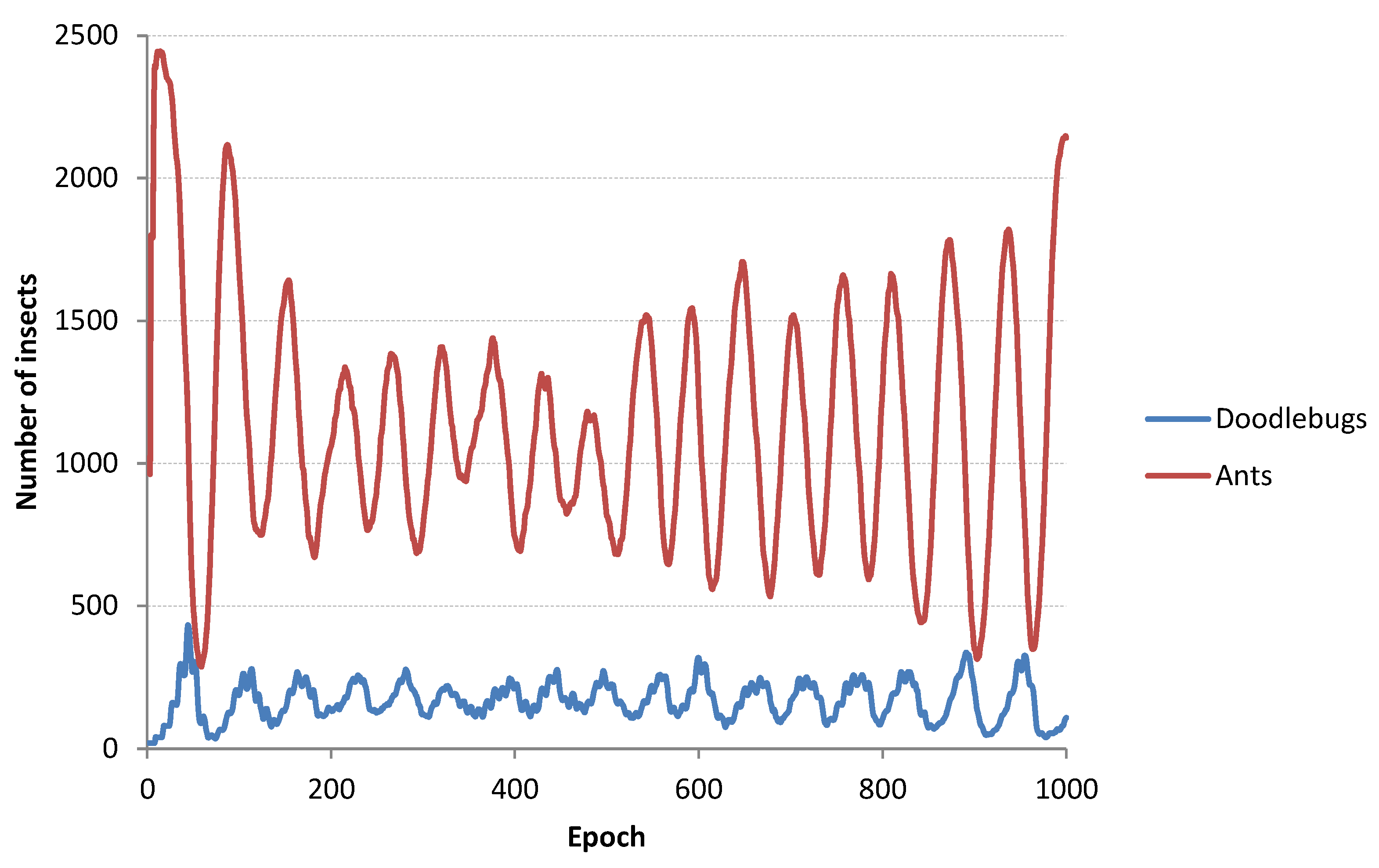
| Predator-Prey→ PredatorPreyConsole, PredatorPreyGui | These projects present a simulation with two species, predators and prey, which emphasizes the oscillating evolution of the two populations. The grid world (i.e., the natural environment) is stored in the Memory property of the ActressMAS software environment and can be accessed by the individuals. Individuals can be created and removed from the environment. |
| Simple Observables→ ColorGame, NumberGame | These projects focus on the use of observable properties. Each agent perceives the other agents with a certain assigned color or with an assigned number in a specific range. |
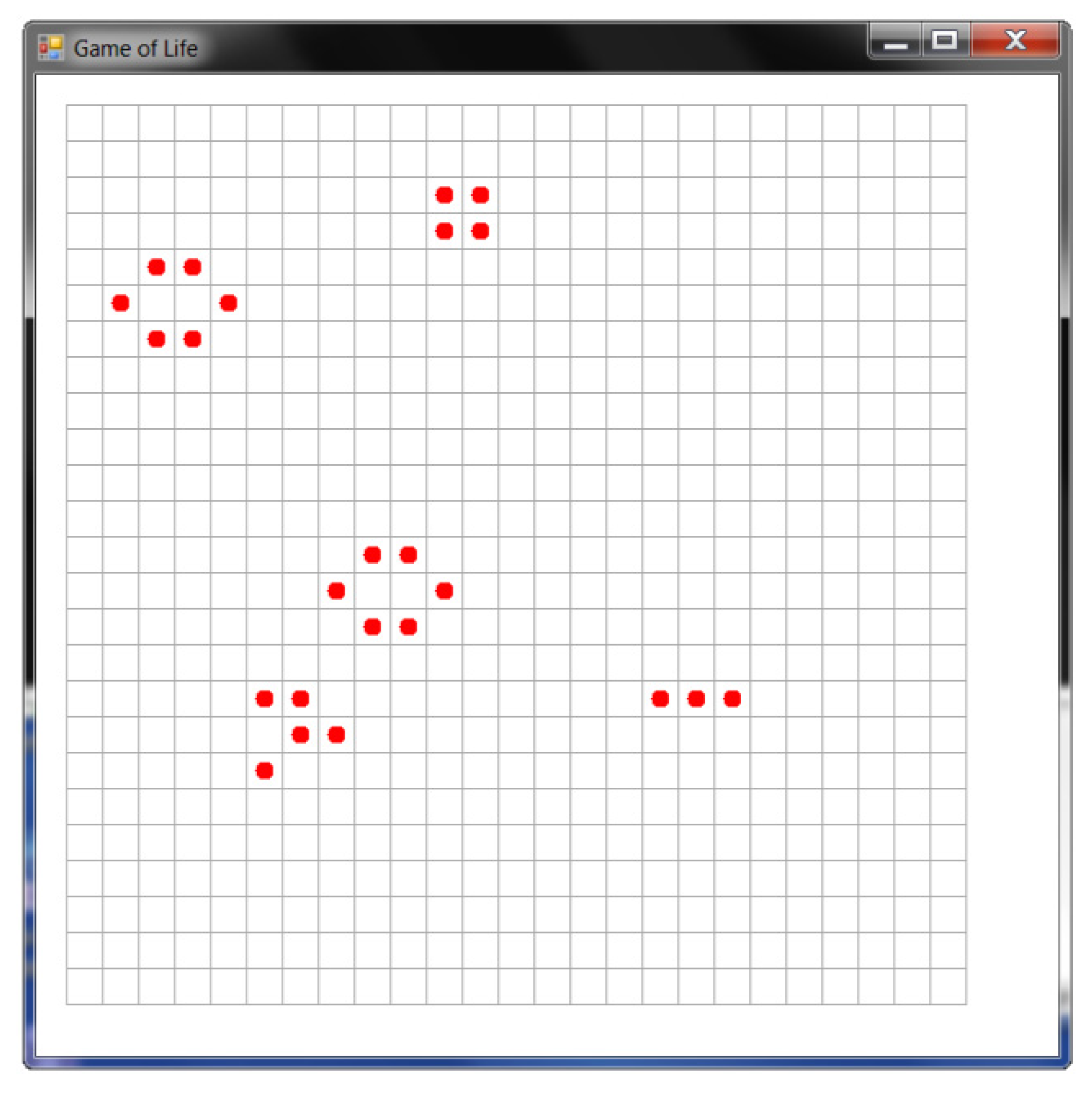
| Game of Life | It is an implementation of Conway’s “game of life” using observable properties of agents/cells to compute the number of alive neighbors. |
| Voting | It presents a voting protocol that first tries to identify the Condorcet winner using the Copeland’s method, and if no Condorcet winner exists, it uses Borda count to produce the result. |
| Mobile Examples→ MyServerConsole, MasMobileConsole, MyServerGui, MasMobileGui | These projects present an example with mobile and static agents. A mobile agent visits the existing containers, collects information form the static agents running there and then returns to its original container and reports the information. There are two equivalent implementations, one using a console for displaying messages, i.e., a character user interface, and another using a Windows-based graphical user interface. |
| Mobile Examples→ RemoteMessages | It shows how two agents in different containers can communicate by sending remote messages. |
| Benchmarks→PingPong | This is a benchmark that measures the number of messages that can be exchanged between agents in a time unit in a communication-intensive scenario. |
| Benchmarks→Skynet, SkynetNumeric | This is a benchmark that measures the performance of agent creation and basic calculations. In Skynet, the numbers are encoded into string messages, while in SkynetNumeric, the numbers are encoded as 64-bit integer numbers. However, ActressMAS does not exhibit a significant difference in performance in the two cases. |
References
- Leon, F. ActressMAS Library. 2018–2021. Available online: https://github.com/florinleon/ActressMas (accessed on 1 November 2021).
- Leon, F. ActressMAS. A .NET Multiagent Framework. 2021. Available online: http://florinleon.byethost24.com/actressmas (accessed on 1 November 2021).
- Pal, C.V.; Leon, F.; Paprzycki, M.; Ganzha, M. A Review of Platforms for the Development of Agent Systems. arXiv 2020, arXiv:2007.08961; 40 pages. [Google Scholar]
- Bellifemine, F.L.; Caire, G.; Greenwood, D. Developing Multi-Agent Systems with JADE; Wiley Series in Agent Technology: Chichester, UK, 2007. [Google Scholar]
- Luke, S.; Balan, G.C.; Panait, L.; Cioffi-Revilla, C.; Paus, S. MASON: A Java Multi-Agent Simulation Library. In Proceedings of the Agent 2003 Conference on Challenges in Social Simulation, Chicago, IL, USA, 2–4 October 2003. [Google Scholar]
- Bernstein, P.; Bykov, S.; Geller, A.; Kliot, G.; Thelin, J. Orleans: Distributed Virtual Actors for Programmability and Scalability; Technical Report MSR-TR-2014-41; Microsoft: Redmont, WA, USA, 2014. [Google Scholar]
- Ritter, F.E.; Tehranchi, F.; Oury, J.D. ACT-R: A cognitive architecture for modeling cognition. Wiley Interdisciplinary Reviews. Cogn. Sci. 2019, 10, e1488. [Google Scholar] [CrossRef]
- Laird, J.E. The Soar Cognitive Architecture; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Newell, A.; Shaw, J.C.; Simon, H.A. Elements of a theory of human problem solving. Psychol. Rev. 1958, 65, 151–166. [Google Scholar] [CrossRef]
- Bordini, R.H.; Hübner, J.F.; Wooldridge, M. Programming Multi-Agent Systems in AgentSpeak Using Jason; Wiley Series in Agent Technology: Chichester, UK, 2007. [Google Scholar]
- Rao, A.S.; Georgeff, M.P. Modeling Rational Agents within a BDI-Architecture. In Proceedings of the 2nd International Conference on Principles of Knowledge, Representation and Reasoning, Cambridge, MA, USA, 22–25 April 1991; pp. 473–484. [Google Scholar]
- Rao, A.S. AgentSpeak(L): BDI Agents Speak Out in a Logical Computable Language. In Proceedings of the Seventh European Workshop on Modelling Autonomous Agents in a Multi-Agent World (MAAMAW-96), Einhoven, The Netherlands, 22–25 January 1996. [Google Scholar]
- Brockman, G.; Cheung, V.; Pettersson, L.; Schneider, J.; Schulman, J.; Tang, J.; Zaremba, W. OpenAI Gym. arXiv 2016, arXiv:1606.01540; 4 pages. [Google Scholar]
- Beattie, C.; Leibo, J.Z.; Teplyashin, D.; Ward, T.; Wainwright, M.; Küttler, H.; Lefrancq, A.; Green, S.; Valdés, V.; Sadik, A.; et al. DeepMind Lab. arXiv 2016, arXiv:1612.03801; 11 pages. [Google Scholar]
- Wilensky, U.; Rand, W. An Introduction to Agent-Based Modeling: Modeling Natural, Social, and Engineered Complex Systems with NETLogo; The MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. arXiv 2017, arXiv:1711.03938; 16 pages. [Google Scholar]
- Horni, A.; Nagel, K.; Axhausen, K.W. (Eds.) The Multi-Agent Transport Simulation MATSim; Ubiquity Press: London, UK, 2016. [Google Scholar] [CrossRef]
- Bonér, J.; Klang, V.; Kuhn, R. Akka Library. 2021. Available online: https://akka.io (accessed on 1 November 2021).
- Petabridge. Akka.NET Library. 2021. Available online: https://getakka.net (accessed on 1 November 2021).
- Hewitt, C.; Bishop, P.; Steiger, R. A Universal Modular Actor Formalism for Artificial Intelligence. In Proceedings of the 3rd International Joint Conference on Artificial intelligence (IJCAI’73), Stanford, CA, USA, 20–23 August 1973; pp. 235–245. [Google Scholar]
- Wooldridge, M. Intelligent Agents. Multiagent Systems—A Modern Approach to Distributed Artificial Intelligence; Weiss, G., Ed.; The MIT Press: Cambridge, MA, USA, 2000; pp. 27–77. [Google Scholar]
- Wooldridge, M. An Introduction to Multiagent Systems, 2nd ed.; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Burgin, M. Systems, Actors and Agents: Operation in a Multicomponent Environment. arXiv 2017, arXiv:1711.08319v1; 28 pages. [Google Scholar]
- Rumbaugh, J.; Jacobson, I.; Booch, G. Unified Modeling Language Reference Manual, 2nd ed.; Pearson Education: Boston, MA, USA, 2005. [Google Scholar]
- Foundation for Intelligent Physical Agents. FIPA Communicative Act Library Specification. 2002. Available online: http://www.fipa.org/specs/fipa00037/SC00037J.html (accessed on 1 November 2021).
- Austin, J.L. How to Do Things with Words; Clarendon Press: Oxford, UK, 1975. [Google Scholar]
- Cugola, G.; Ghezzi, C.; Picco, G.P.; Vigna, G. Analyzing Mobile Code Languages. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1997; Volume 1222, pp. 94–109. [Google Scholar]
- Gamma, E.; Helm, R.; Johnson, R.; Vlissides, J. Design Patterns: Elements of Reusable Object-Oriented Software; Addison-Wesley Professional: Boston, MA, USA, 1994. [Google Scholar]
- Asynkron, A.B. Proto. Actor Library. 2021. Available online: https://proto.actor (accessed on 1 November 2021).
- Foundation for Intelligent Physical Agents. FIPA Abstract Architecture Specification. 2002. Available online: http://www.fipa.org/specs/fipa00001/SC00001L.html (accessed on 1 November 2021).
- Poslad, S.; Buckle, P.; Hadingham, R. The FIPA-OS agent platform: Open source for open standards. In Proceedings of the 5th International Conference and Exhibition on the Practical Application of Intelligent Agents and Multi-Agents, Manchester, UK, 10–12 April 2000; Volume 355. [Google Scholar]
- Foundation for Intelligent Physical Agents. FIPA Contract Net Interaction Protocol Specification. 2002. Available online: www.fipa.org/specs/fipa00029/SC00029H.html (accessed on 1 November 2021).
- Braubach, L.; Pokahr, A.; Lamersdorf, W. Jadex: A BDI-Agent System Combining Middleware and Reasoning. In Whitestein Series in Software Agent Technologies; Birkhäuser-Verlag: Basel, Switzerland, 2006; pp. 143–168. [Google Scholar] [CrossRef] [Green Version]
- Boissier, O.; Bordini, R.H.; Hübner, J.F.; Ricci, A.; Santi, A. Multi-agent Oriented Programming with JaCaMo. Sci. Comput. Program. 2013, 78, 747–761. [Google Scholar] [CrossRef]
- Gutknecht, O.; Ferber, J. The MadKit Agent Platform Architecture. In Infrastructure for Agents, Multi-Agent Systems, and Scalable Multi-Agent Systems; Springer: Berlin/Heidelberg, Germany, 2001; pp. 48–55. [Google Scholar] [CrossRef]
- Leon, F. FunCs Library. 2018–2021. Available online: https://github.com/florinleon/FunCs (accessed on 1 November 2021).
- Steels, L. Cooperation Between Distributed Agents Through Self-Organisation. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, Ibaraki, Japan, 3–6 July 1990; pp. 8–14. [Google Scholar] [CrossRef]
- Taillandier, P.; Gaudou, B.; Grignard, A.; Huynh, Q.; Marilleau, N.; Caillou, P.; Philippon, D.; Drogoul, A. Building, composing and experimenting complex spatial models with the GAMA platform. Geoinformatica 2019, 23, 299–322. [Google Scholar] [CrossRef] [Green Version]
- Ould, M.A. Business Process Management: A Rigorous Approach; British Computer Society, Meghan Kiffer: Tampa, FL, USA, 2005. [Google Scholar]
- Leon, F.; Bădică, C. A Comparison Between Jason and F# Programming Languages for the Enactment of Business Agents. In Proceedings of the International Symposium on INnovations in Intelligent SysTems and Applications (INISTA), Sinaia, Romania, 2–5 August 2016. [Google Scholar] [CrossRef]
- Martin, G. The Fantastic Combinations of John Conway’s New Solitaire Game “Life”. Math. Games. Sci. Am. 1970, 223, 120–123. [Google Scholar] [CrossRef]




| Benchmark/ Common Settings | Scenario | Results |
|---|---|---|
| Ping Pong 10 agents, 10,000,000 messages | parallel execution | 1.516 s 6,462,079 messages/s |
| sequential execution | 3.880 s 2,577,297 messages/s | |
| Skynet 10 children | 10,000 agents parallel execution | 3.800 s |
| 20,000 agents parallel execution | 12.221 s | |
| 50,000 agents parallel execution | 95.611 s | |
| 100,000 agents parallel execution | 443.956 s | |
| 10,000 agents sequential execution | 0.600 s | |
| 20,000 agents sequential execution | 1.523 s | |
| 50,000 agents sequential execution | 13.620 s | |
| 100,000 agents sequential execution | 92.017 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leon, F. ActressMAS, a .NET Multi-Agent Framework Inspired by the Actor Model. Mathematics 2022, 10, 382. https://doi.org/10.3390/math10030382
Leon F. ActressMAS, a .NET Multi-Agent Framework Inspired by the Actor Model. Mathematics. 2022; 10(3):382. https://doi.org/10.3390/math10030382
Chicago/Turabian StyleLeon, Florin. 2022. "ActressMAS, a .NET Multi-Agent Framework Inspired by the Actor Model" Mathematics 10, no. 3: 382. https://doi.org/10.3390/math10030382
APA StyleLeon, F. (2022). ActressMAS, a .NET Multi-Agent Framework Inspired by the Actor Model. Mathematics, 10(3), 382. https://doi.org/10.3390/math10030382