


Thyroid Nodule Segmentation in Ultrasound Image Based on Information Fusion of Suggestion and Enhancement Networks


Abstract
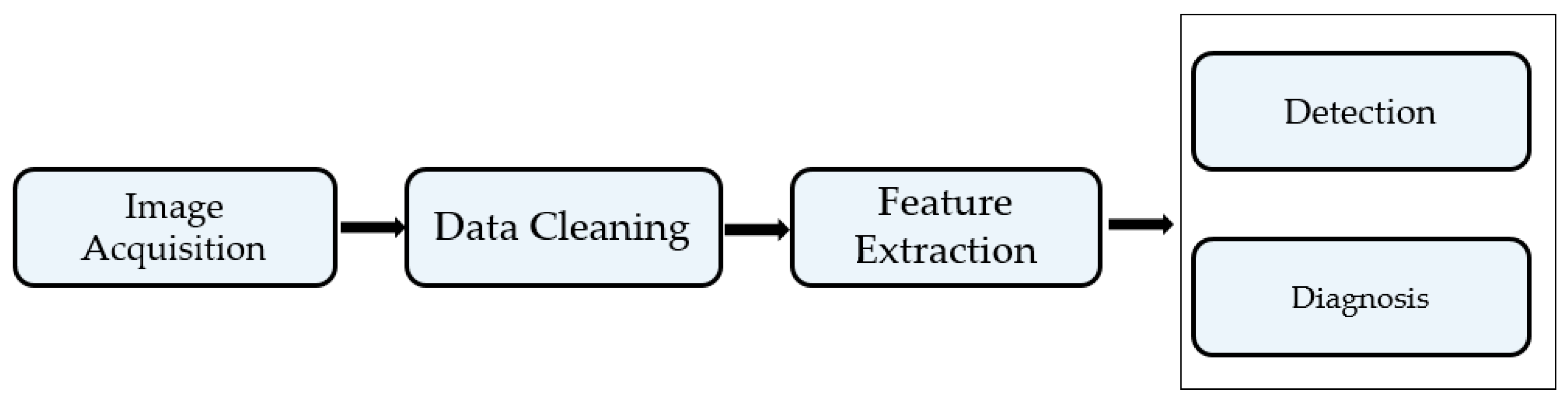
:1. Introduction
2. Related Work
- -
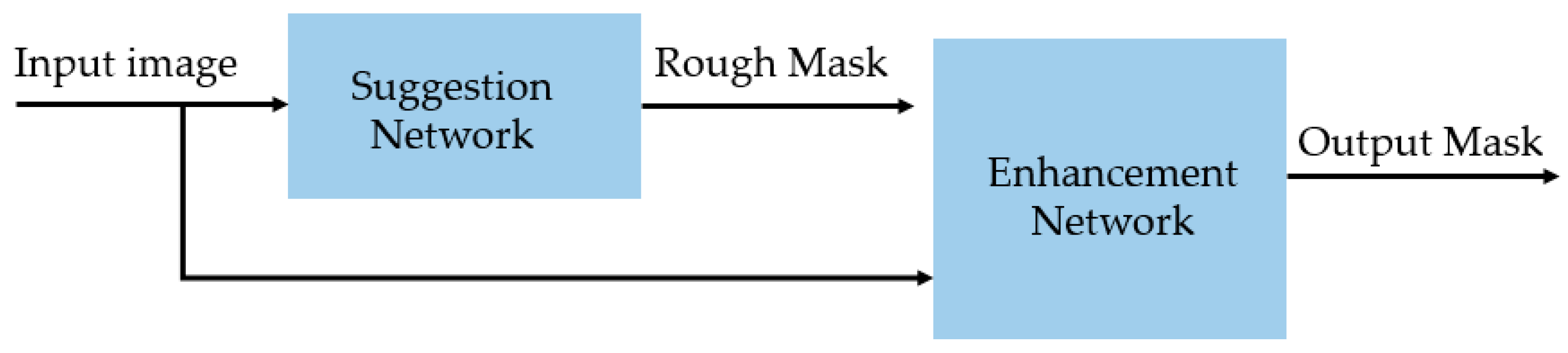
- We propose the use of a sequential nested architecture of suggestion and enhancement networks to increase the performance of thyroid nodule segmentation.
- -
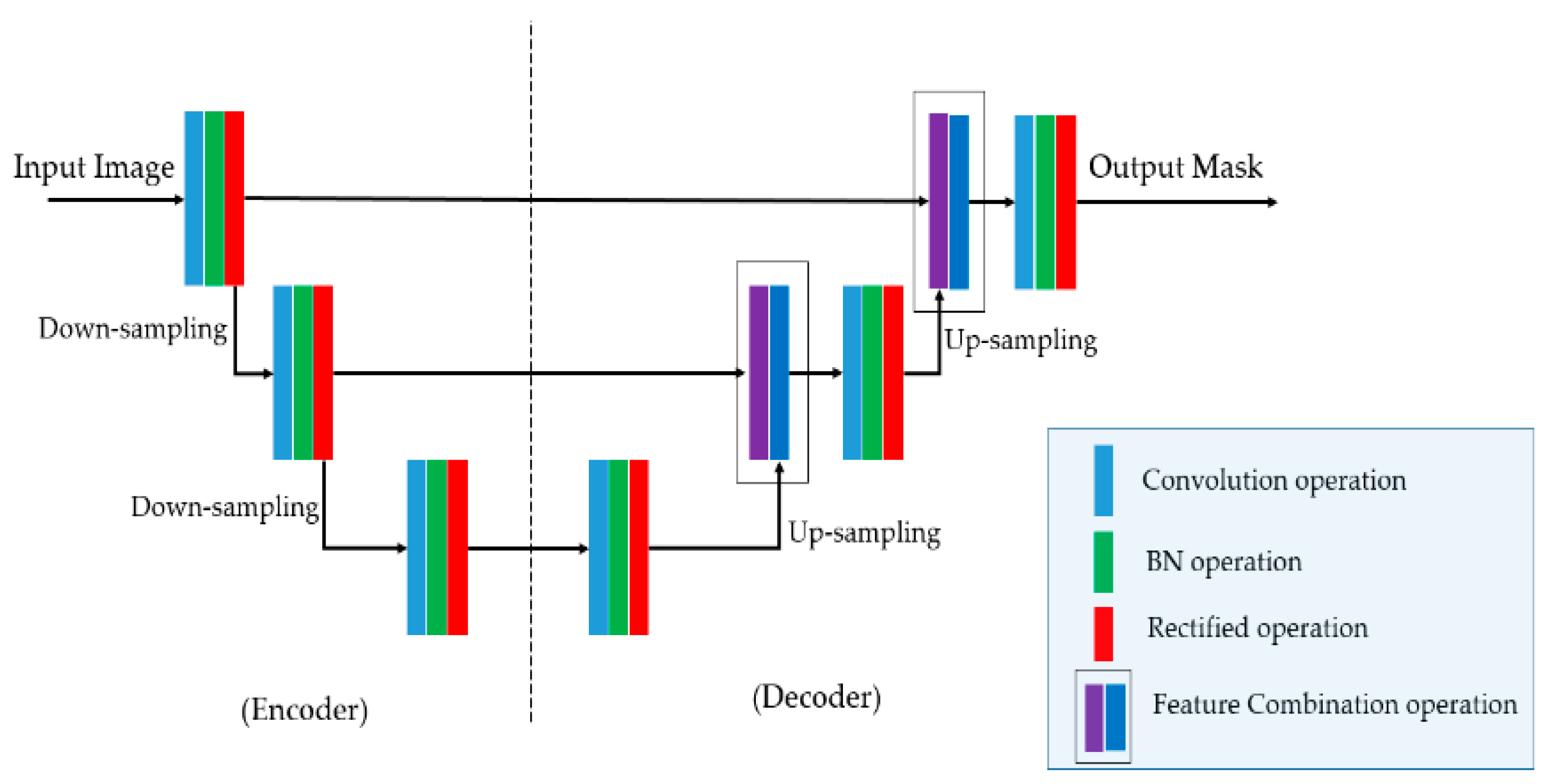
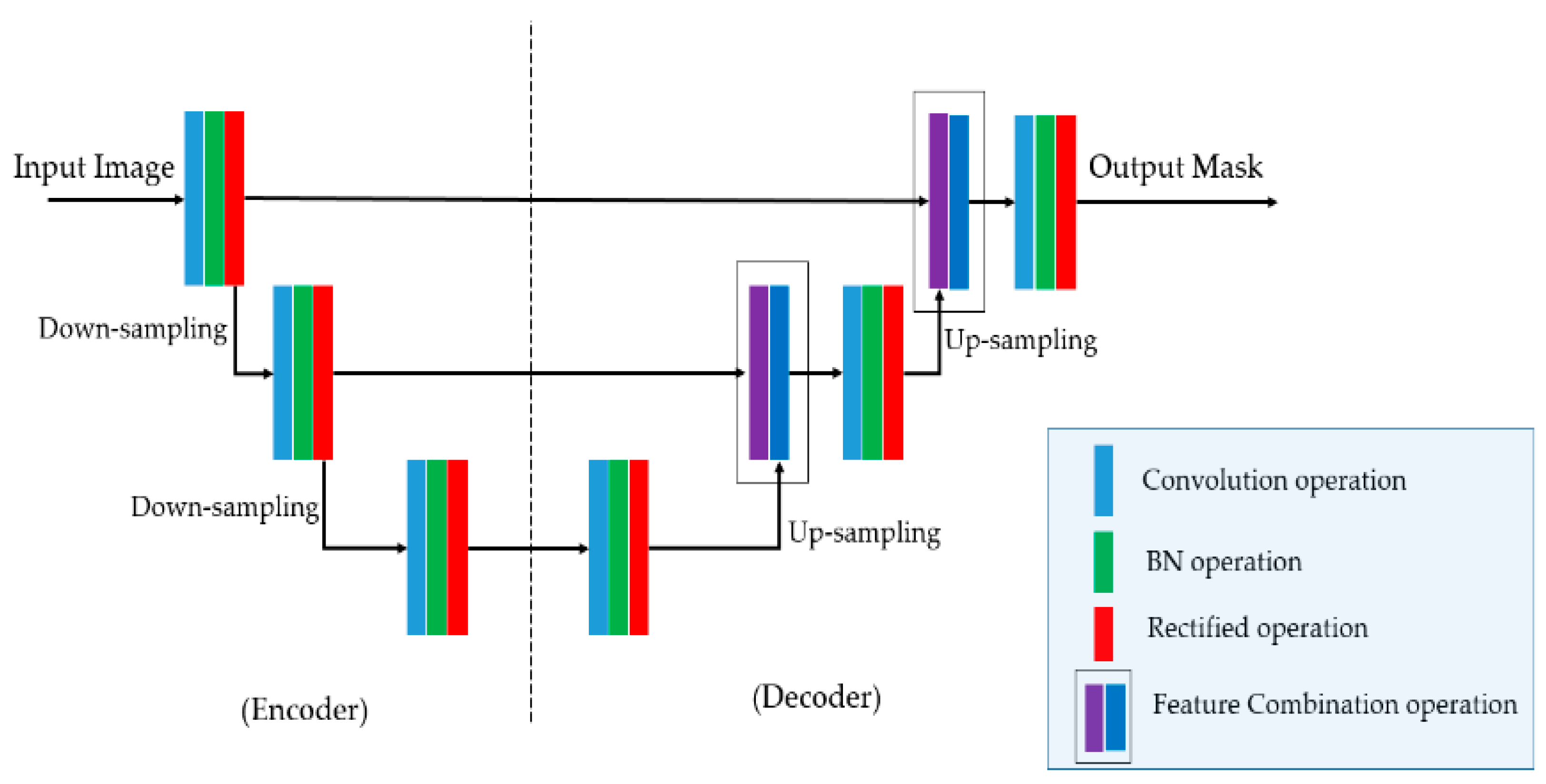
- Our proposed method uses an enhanced UNet-based network (suggestion network) to learn a rough salient map of thyroid nodules from the input ultrasound image.
- -
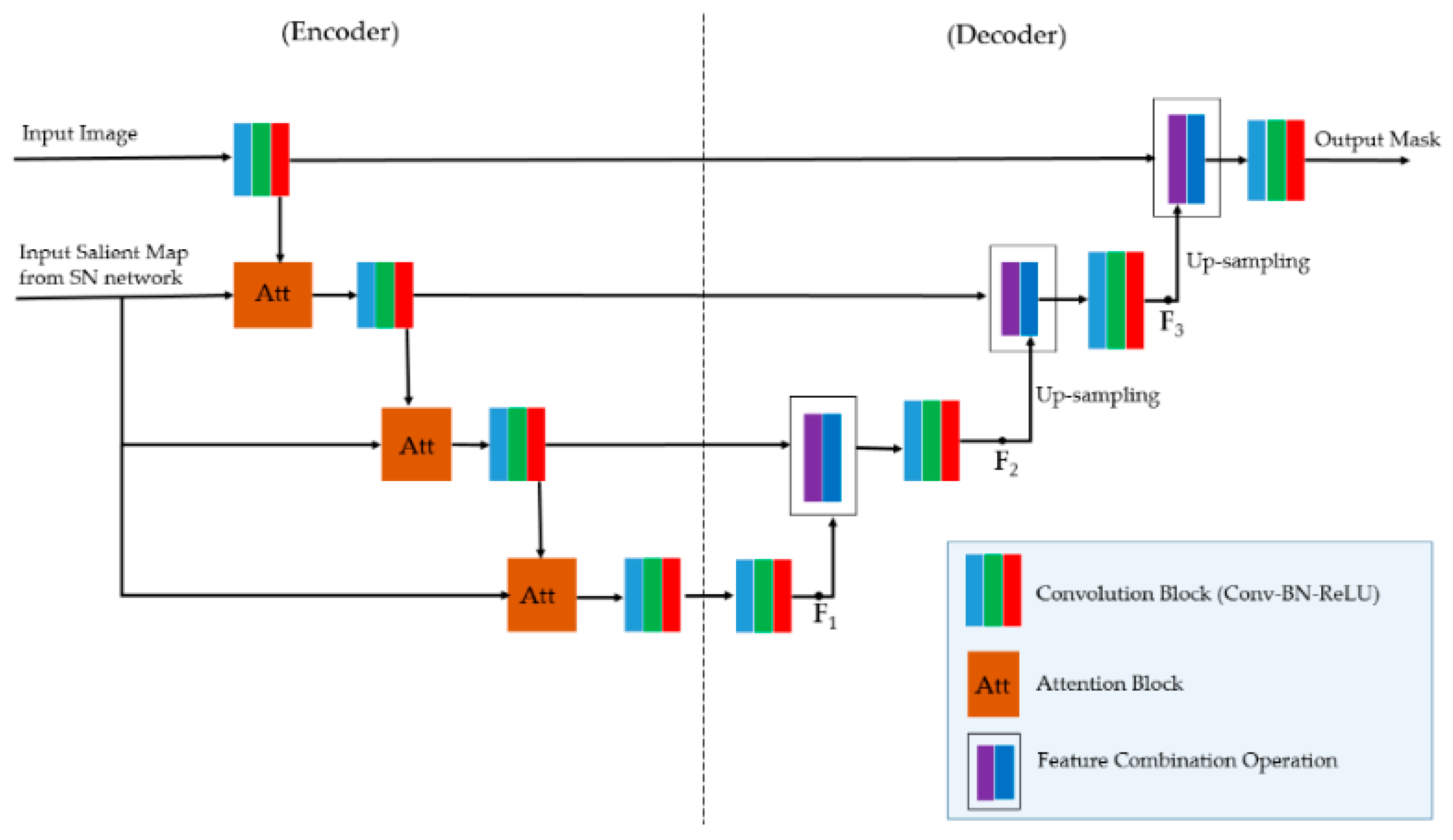
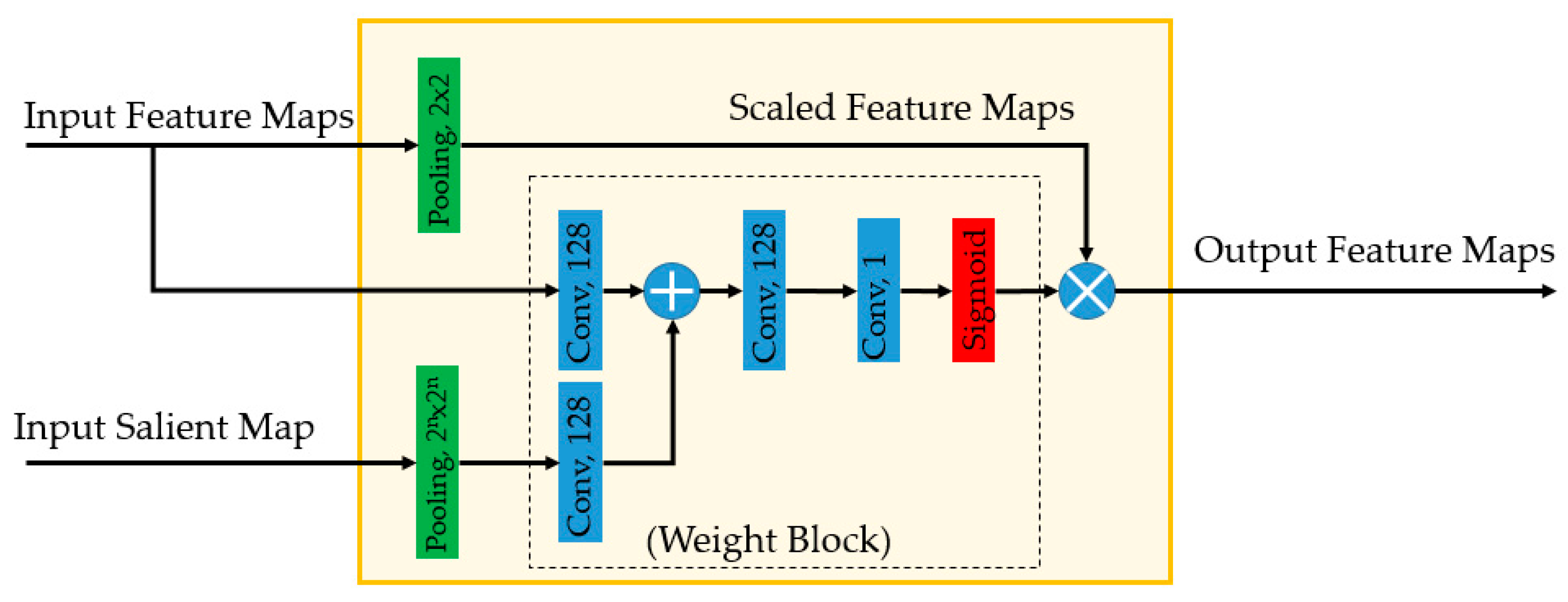
- An additional enhanced UNet-based network with an associated attention module (enhancement network) is proposed to increase the performance of the suggestion network.
- -
- We make our pretrained model for thyroid nodule segmentation public to allow other researchers to use it in their studies [27].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Segmentation Method | Strengths | Weaknesses |
|---|---|---|---|
| Conventional segmentation methods | Graph-based method [10]. |
| Low accuracy |
| Active contour method [11]. | |||
| Deep learning-based segmentation methods | UNet network [12]. |
| Optimal depth of network is unknown |
| Residual UNet-based network [20]. |
| ||
| UNet++ network [21]. |
| Longer training time due to the complexity of architecture | |
| UNet 3+ network [22] |
| ||
| Connected-UNets [23] |
| ||
| UNet with Transformer blocks [24] |
| ||
| Simplified UNet (Half-UNet network) [25] |
| Segmentation accuracy is not better than UNet and its variants | |
| Attention-based UNet network [26] |
| Salient map is learned using complex method | |
| Suggestion and enhancement networks (proposed method) |
| Takes long time to train and inference |
3. Proposed Segmentation Method
3.1. Overall Segmentation Netowork Architecture
3.2. Suggestion Network
3.3. Enhancement Network
3.4. Loss Function
4. Results and Analysis
4.1. Experimental Datasets
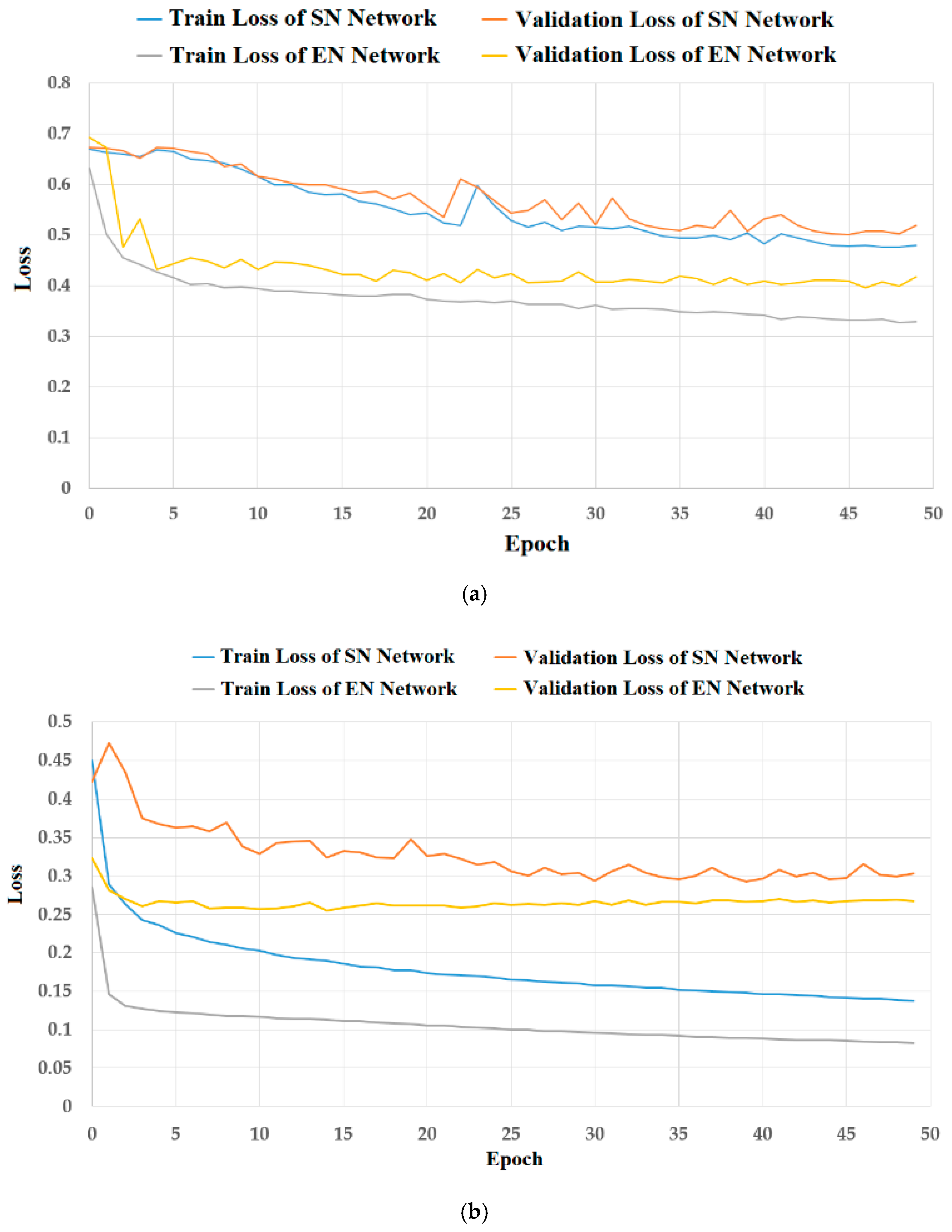
4.2. Training of Proposed Networks
4.2.1. Analyses of Model Overfitting
4.2.2. Data Augmentation
4.3. Evaluation Metrics
4.4. Performance Evaluation on Testing Datasets
4.4.1. Ablation Studies
4.4.2. Comparison with Previous Methods and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Masood, A.; Sheng, B.; Yang, P.; Li, P.; Li, H.; Kim, J.; Feng, D.D. Automated decision support system for lung cancer detection and classification via enhanced RFCN with multilayer fusion RPN. IEEE Trans. Ind. Inform. 2020, 16, 7791–7801. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Pham, T.D.; Batchuluun, G.; Yoon, H.; Park, K.R. Artificial intelligence-based thyroid nodule classification using information from spatial and frequency domains. J. Clin. Med. 2019, 8, 1976. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Zhang, G.; Chen, S.; Albuquerque, V. Healthcare industry 4.0: A novel intelligent multi-sampling tensor network for detection and classification of oral cancer. IEEE Trans. Ind. Inform. 2022, 18, 7853–7861. [Google Scholar] [CrossRef]
- Hu, H.; Li, Q.; Zhao, Y.; Zhang, Y. Parallel deep learning algorithms with hybrid attention mechanism for image segmentation of lung tumors. IEEE Trans. Ind. Inform. 2021, 17, 2880–2889. [Google Scholar] [CrossRef]
- Yahiaoui, A.F.Z.; Bessaid, A. Segmentation of ischemic stroke area from CT brain images. In Proceedings of the International Symposium on Signal, Image, Video and Communications (ISIVC), Tunis, Tunisia, 21–23 November 2016; pp. 13–17. [Google Scholar] [CrossRef]
- Vasilakakis, M.; Iosifidou, V.; Fragkaki, P.; Iakovidis, D. Bone fracture identification in X-ray images using fuzzy wavelet features. In Proceedings of the 19th IEEE International Conference on Bioinformatics and Bioengineering (BIBE), Athens, Greece, 28–30 October 2019; pp. 726–730. [Google Scholar] [CrossRef]
- Castiglione, A.; Vijayakumar, P.; Nappi, M.; Sadiq, S.; Umer, M. COVID-19: Automatic detection of the novel coronavirus disease from CT images using an optimized convolutional neural network. IEEE Trans. Ind. Inform. 2021, 17, 6480–6488. [Google Scholar] [CrossRef]
- Wang, Z.; Luo, Y.; Xin, J.; Zhang, H.; Qu, L.; Wang, Z.; Yao, Y.; Zhu, W.; Wang, X. Computer-aided diagnosis based on extreme learning machine: A review. IEEE Access 2020, 8, 141657–141673. [Google Scholar] [CrossRef]
- Jia-xin, C.; Sen, L. A medical image segmentation method based on watershed transform. In Proceedings of the 5th International Conference on Computer and Information Technology (CIT’05), Shanghai, China, 21–23 September 2005; pp. 634–638. [Google Scholar] [CrossRef]
- Huang, Q.-H.; Lee, S.-Y.; Liu, L.-Z.; Lu, M.-H.; Jin, L.-W.; Li, A.-H. A robust graph-based segmentation method for breast tumors in ultrasound images. Ultrasonics 2012, 52, 266–275. [Google Scholar] [CrossRef]
- Chen, X.; Williams, B.M.; Vallabhaneni, S.R.; Czanner, G.; Williams, R.; Zheng, Y. Learning active contour models for medical image segmentation. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 11624–11632. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. arXiv 2015, arXiv:1505.04597. [Google Scholar]
- Li, X.; Jiang, Y.; Li, M.; Yin, S. Lightweight attention convolutional neural network for retinal vessel image segmentation. IEEE Trans. Ind. Inform. 2021, 17, 1958–1967. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. NIPS 2012, 60, 84–90. [Google Scholar] [CrossRef]
- He, K.; Zhang, Z.; Ren, S.; Sun, J. Deep residual learning for image recognition. arXiv 2015, arXiv:1512.03385. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, E.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. arXiv 2014, arXiv:1409.4842v1. [Google Scholar]
- Li, J.; Chen, J.; Sheng, B.; Li, P.; Yang, P.; Feng, D.D.; Qi, J. Automatic detection and classification system of domestic waste via multimodel cascaded convolutional neural network. IEEE Trans. Ind. Inform. 2022, 18, 163–173. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Yoon, H.S.; Pham, D.T.; Park, K.R. Spoof detection for finger-vein recognition system using NIR camera. Sensors 2017, 17, 2261. [Google Scholar] [CrossRef]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. arXiv 2017, arXiv:1703.10593v7. [Google Scholar]
- Khanna, A.; Londhe, N.D.; Gupta, S.; Semwal, A. A deep residual U-Net convolutional neural network for automated lung segmentation in computed tomography images. Biocybern. Biomed. Eng. 2020, 40, 1314–1327. [Google Scholar] [CrossRef]
- Zhou, Z.; Siddiquee, M.-M.R.; Tajbakhsh, N.; Liang, J. UNet++: A nested U-Net architecture for medical image segmentation. arXiv 2018, arXiv:1807.10165v1. [Google Scholar]
- Huang, H.; Lin, L.; Tong, R.; Hu, H.; Zhang, Q.; Iwamoto, Y.; Han, X.; Chen, Y.-W.; Wu, J. UNet 3+: A full-scale connected UNet for medical image segmentation. arXiv 2020, arXiv:2004.08790v1. [Google Scholar]
- Baccouche, A.; Garcia-Zapirain, B.; Olea, C.C.; Elmaghraby, A.S. Connected-UNets: A deep learning architecture for breast mass segmentation. NPJ Breast Cancer 2021, 7, 151. [Google Scholar] [CrossRef]
- Lin, A.; Chen, B.; Xu, J.; Zhang, Z.; Lu, G. DS-TransUNet: Dual swin transformer U-Net for medical image segmentation. arXiv 2021, arXiv:2106.06716v1. [Google Scholar] [CrossRef]
- Lu, H.; She, Y.; Tie, J.; Xu, S. Half-UNet: A simplified U-Net architecture for medical image segmentation. Front. Neuroinform. 2022, 16, 911679. [Google Scholar] [CrossRef] [PubMed]
- Vakanski, A.; Xian, M.; Freer, P. Attention enriched deep learning model for breast tumor segmentation in ultrasound images. arXiv 2019, arXiv:1910.08978v2. [Google Scholar] [CrossRef] [PubMed]
- Dongguk NANets. 2021. Available online: https://github.com/idahousa/NANets (accessed on 10 July 2022).
- Li, R.; Zheng, S.; Duan, C.; Zhang, C.; Su, J.; Atkinson, P.M. Multi-Attention-Network for sematic segmentation of fine resolution remote sensing images. arXiv 2020, arXiv:2009.02130v4. [Google Scholar]
- Sudre, C.H.; Li, W.; Vercauteren, T.; Ourselin, S.; Cardoso, M.J. Generalised Dice overlap as a deep learning loss function for highly unbalanced segmentations. arXiv 2017, arXiv:1707.03237v3. [Google Scholar]
- Jadon, S. A survey of loss functions for semantic segmentation. arXiv 2020, arXiv:2006.14822. [Google Scholar]
- Pedraza, L.; Vargas, C.; Narvaez, F.; Duran, O.; Munoz, E.; Romero, E. An open access thyroid ultrasound-image database. In Proceedings of the 10th International Symposium on Medical Information Processing and Analysis, Cartagena de Indias, Colombia, 28 January 2015; Volume 9287, pp. 1–6. [Google Scholar]
- Wunderling, T.; Golla, B.; Poudel, P.; Arens, C.; Friebe, M.; Hansen, C. Comparison of thyroid segmentation techniques for 3D ultrasound. In Proceedings of the SPIE Medical Imaging, Orlando, FL, USA, 24 February 2017. [Google Scholar] [CrossRef]
- Tensorflow. 2021. Available online: https://www.tensorflow.org/ (accessed on 10 July 2022).
- Nguyen, D.T.; Lee, M.B.; Pham, T.D.; Batchuluun, G.; Arsalan, M.; Park, K.R. Enhanced image-based endoscopic pathological site classification using an ensemble of deep learning models. Sensors 2020, 20, 5982. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Kang, J.K.; Pham, T.D.; Batchuluun, G.; Park, K.R. Ultrasound image-based diagnosis of malignant thyroid nodule using artificial intelligence. Sensors 2020, 20, 1822. [Google Scholar] [CrossRef]
- Gurrola-Ramos, J.; Dalmau, O.; Alarcon, T. U-Net based neural network for fringe pattern denoising. Opt. Lasers Eng. 2022, 149, 106829. [Google Scholar] [CrossRef]
- Li, D.; Dharmawan, D.A.; Ng, B.P.; Rahardja, S. Residual U-Net for retinal vessel segmentation. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 1425–1429. [Google Scholar] [CrossRef]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual explanations from deep networks via gradient-based localization. arXiv 2016, arXiv:1610.02391v1. [Google Scholar]









| Benign Cases | Malignant Cases | Total |
|---|---|---|
| 52 | 246 | 298 |
| Patient ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Number of 2D Images | 932 | 942 | 1058 | 1020 | 958 | 1064 | 1134 | 1060 |
| Patient ID | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| Number of 2D Images | 928 | 892 | 1004 | 968 | 812 | 756 | 794 | 932 |
| Total | 15,254 | |||||||
| Loss Function | Optimizer | Mini-Batch Size | Learning Rate | Number of Epochs |
|---|---|---|---|---|
| Dice | Adam | 8 | 0.0001 | 50 |
| Method | Testing Part 1 | Testing Part 2 | Testing Part 3 | Testing Part 4 | Testing Part 5 | Average | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DSC | Acc | DSC | Acc | DSC | Acc | DSC | Acc | DSC | Acc | DSC | Acc | |
| SN | 0.574 | 0.825 | 0.540 | 0.806 | 0.572 | 0.824 | 0.533 | 0.844 | 0.554 | 0.822 | 0.555 | 0.824 |
| SN + EN | 0.609 | 0.856 | 0.529 | 0.860 | 0.652 | 0.861 | 0.566 | 0.856 | 0.626 | 0.859 | 0.596 | 0.858 |
| Method | UNet-Based Network | Residual UNet-Based Network | UNet++-Based Network | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SN | SN + EN | SN | SN + EN | SN | SN + EN | |||||||
| DSC | Acc | DSC | Acc | DSC | Acc | DSC | Acc | DSC | Acc | DSC | Acc | |
| TDID dataset | 0.555 | 0.824 | 0.596 | 0.858 | 0.464 | 0.825 | 0.517 | 0.851 | 0.573 | 0.822 | 0.612 | 0.850 |
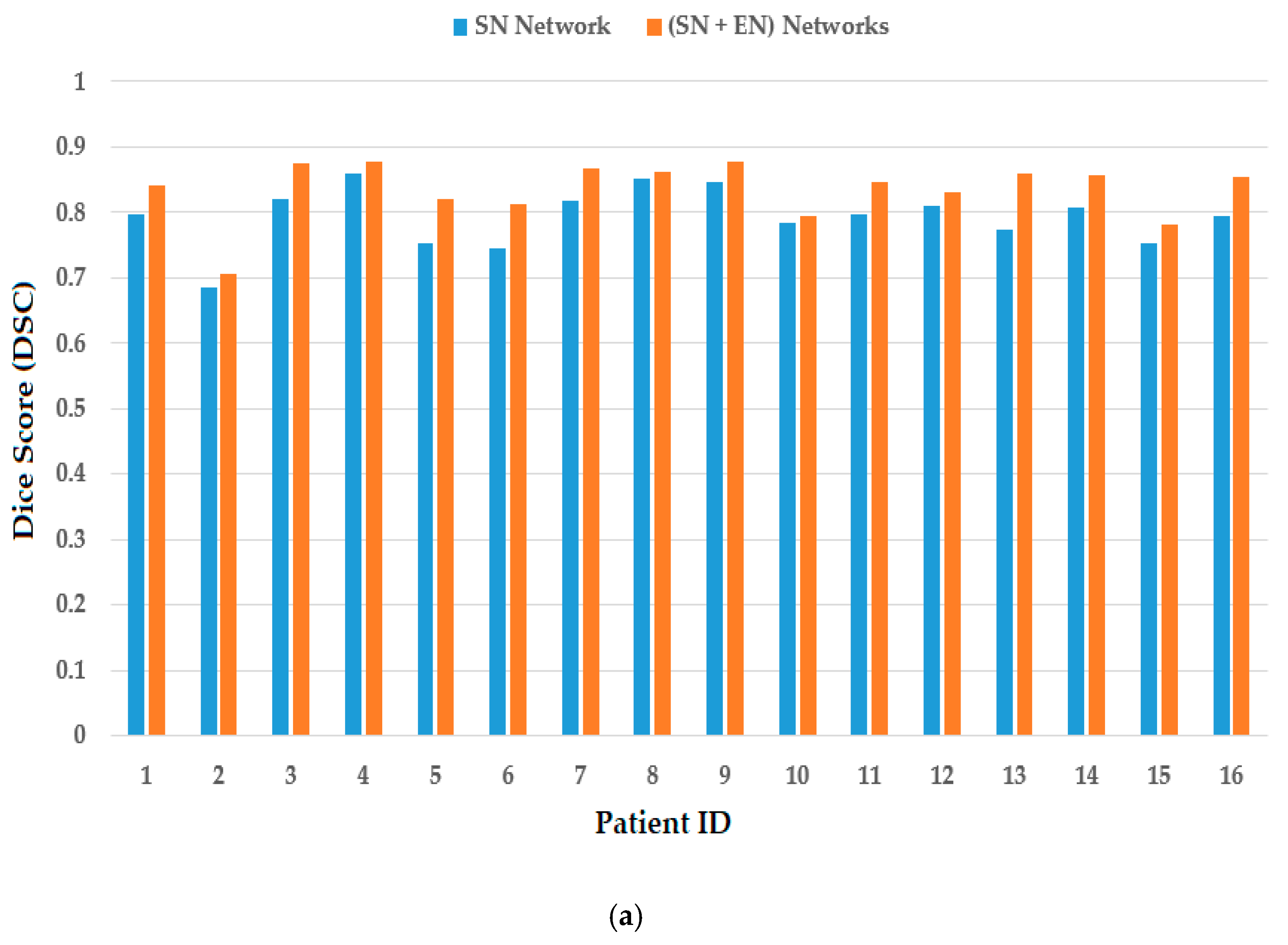
| 3DThyroid dataset | 0.793 | 0.969 | 0.835 | 0.975 | 0.737 | 0.961 | 0.831 | 0.975 | 0.792 | 0.968 | 0.837 | 0.975 |
| Dataset | Network Configuration | Depth of SN | Only EN | ||
|---|---|---|---|---|---|
| Two-Scale | Three-Scale | Four-Scale | |||
| TDID | SN | 0.434 | 0.555 | 0.513 | 0.490 |
| SN + EN | 0.564 | 0.596 | 0.571 | ||
| 3DThyroid | SN | 0.654 | 0.793 | 0.828 | 0.737 |
| SN + EN | 0.808 | 0.835 | 0.838 | ||
| UNet Network [12] | Residual UNet Network [20] | UNet++ Network [21] | Proposed Network |
|---|---|---|---|
| 0.540 | 0.490 | 0.560 | 0.612 |
| Shallow UNet Network [36] | Shallow Residual UNet Network [37] | Shallow UNet++ Network (UNet++L2) [21] | Semi-Auto Segmentation Method [32] | Proposed Network | ||
|---|---|---|---|---|---|---|
| Level Set-Based Method | Graph Cut-Based Method | Classifier-Based Method | ||||
| 0.793 | 0.737 | 0.792 | 0.713 | 0.748 | 0.672 | 0.837 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, D.T.; Choi, J.; Park, K.R. Thyroid Nodule Segmentation in Ultrasound Image Based on Information Fusion of Suggestion and Enhancement Networks. Mathematics 2022, 10, 3484. https://doi.org/10.3390/math10193484
Nguyen DT, Choi J, Park KR. Thyroid Nodule Segmentation in Ultrasound Image Based on Information Fusion of Suggestion and Enhancement Networks. Mathematics. 2022; 10(19):3484. https://doi.org/10.3390/math10193484
Chicago/Turabian StyleNguyen, Dat Tien, Jiho Choi, and Kang Ryoung Park. 2022. "Thyroid Nodule Segmentation in Ultrasound Image Based on Information Fusion of Suggestion and Enhancement Networks" Mathematics 10, no. 19: 3484. https://doi.org/10.3390/math10193484
APA StyleNguyen, D. T., Choi, J., & Park, K. R. (2022). Thyroid Nodule Segmentation in Ultrasound Image Based on Information Fusion of Suggestion and Enhancement Networks. Mathematics, 10(19), 3484. https://doi.org/10.3390/math10193484