
Sizing and Sitting of Battery Energy Storage Systems in Distribution Networks with Transient Stability Consideration




Abstract
:1. Introduction
- The sizing and sitting of a BESS in distribution networks with connected renewable energy sources were provided by considering the active power loss, voltage deviation, and total operating cost as the objective functions to minimize;
- Generator power smoothing and short-term voltage stability index were considered using the transient response as the selection strategy to determine the final capacity and location of the BESS.
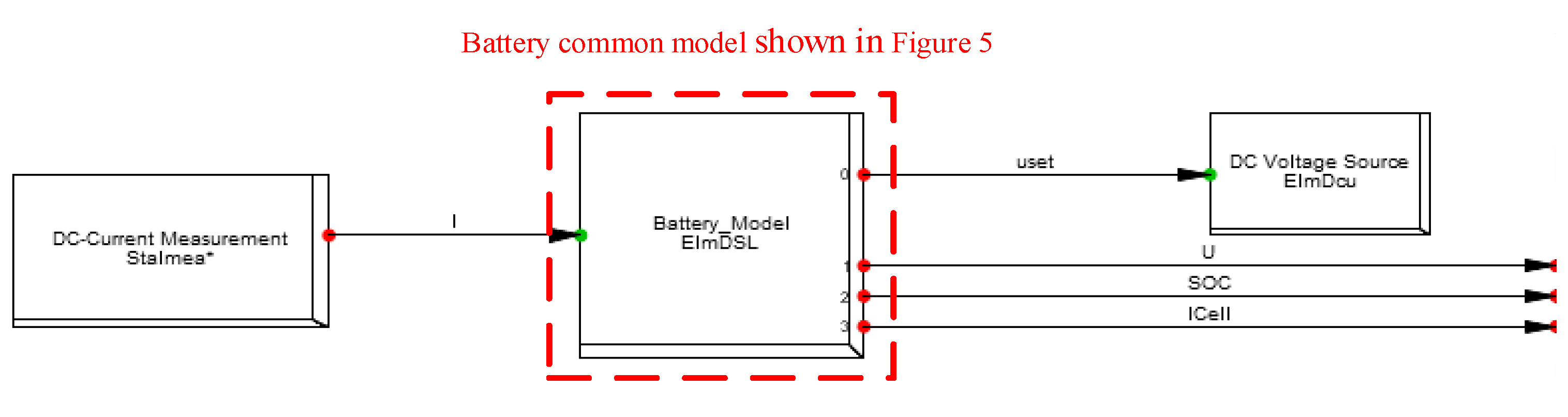
2. Network Component Modeling by DIgSILENT PowerFactory
2.1. Battery Model
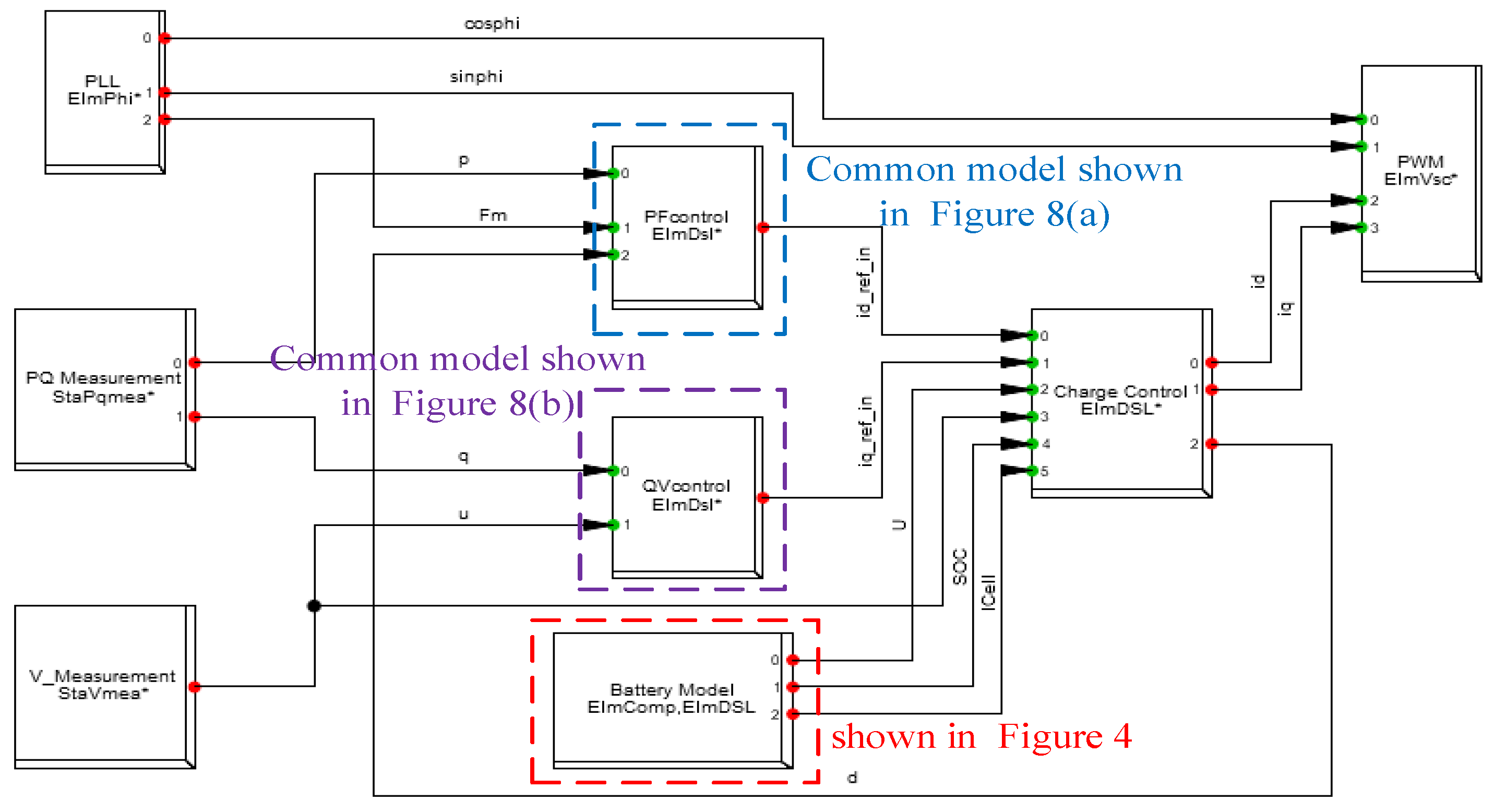
2.2. Smart Inverter Model
2.3. BESS Model
3. Problem Formulations
3.1. Control Variables
3.2. Objective Functions
3.2.1. Active Power Loss
3.2.2. Voltage Deviation
3.2.3. Total Operating Cost
3.3. Constraints
3.3.1. Voltage Constraints
3.3.2. BESS Technical Constraints
3.3.3. Branch Power Flow Constraints
4. Proposed Algorithm
4.1. Pareto Optimality
4.2. Particle Swarm Optimization (PSO)
- Step (1)
- Initialize parameters and population: set the number of particle swarms, external archive, number of iterations, and other parameters;
- Step (2)
- Generate randomly: generate the position and velocity of each particle randomly;
- Step (3)
- Select fitness: the fitness of each particle is calculated according to the objective function, and the non-dominated solution is obtained from the particle swarms and stored in the external archive;
- Step (4)
- Select Gbest: start the iteration and select a non-dominant solution as Gbest from the external archive;
- Step (5)
- Update: use the velocity and position of the particle update formula to obtain the new position and velocity of the particles;
- Step (6)
- Evaluate the fitness of the particles: evaluate the fitness of each particle based on the objective function;
- Step (7)
- Select non-dominated solutions: find new non-dominated solutions from the population;
- Step (8)
- Check the external archive: determine whether the external archive is full or not;
- Step (9)
- When the external archive is not full, the new non-dominated solution obtained from Step 7 is compared with the non-dominated solution in the external archive. If any solution in the external archive dominates the new solution, it is discarded. Otherwise, if the new solution dominates any solution in the external archive, then the dominated solution in the archive is deleted, and the new solution is stored;
- Step (10)
- When the external archive is full, the more crowded archives are removed according to the congestion level, and new solutions are deposited.
4.3. Minimum Manhattan Distance Method
4.4. Final Solution Selection Index
4.4.1. Generator Power Smoothinge Generator Power Smoothing and Short-Term Voltage Stability Index
4.4.2. Short-Term Voltage Stability Index
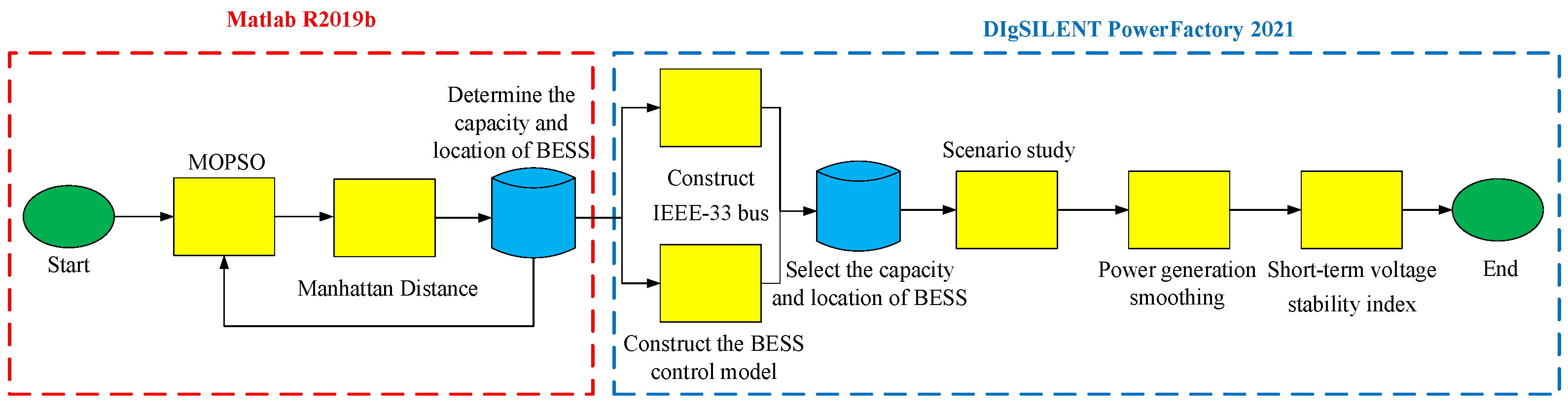
4.5. Proposed Solution Steps
- Step (1)
- Build MATLAB benchmark platform: The benchmark-related parameters, such as line impedance, bus voltage magnitude and phase angle, and active and reactive power of the load bus, are built in MATLAB;
- Step (2)
- Read parameters and mathematical models: The daily load curve and solar power generation curve parameters are incorporated into the benchmark platform. Active power loss, voltage deviation, and cost functions are constructed;
- Step (3)
- Set constraint condition: Set bus voltage, BESS technical, and branch power-flow constraints;
- Step (4)
- Initialize: Initialize the state variables and set the particle swarm-related parameters, such as the number of particle swarms, number of iterations, and acceleration factors;
- Step (5)
- Run the MOPSO algorithm: After the first iteration, the result of each particle is compared with the result of the previous iteration. If the present result is better, then the personal best solution is updated. Moreover, as the global best solution, if the present Gbest is better than the previous iteration result, then Gbest is updated;
- Step (6)
- Determine the convergence condition: If the convergence condition is satisfied, the output Gbest is obtained; otherwise, repeat Step 5 until the simulation converges;
- Step (7)
- Run Manhattan distance method: After Gbest is obtained using the MOPSO algorithm, the capacity and location of the BESS are determined using the Manhattan distance method;
- Step (8)
- Build the DIgSILENT benchmark platform: The benchmark and BESS components, such as generators, loads, transformers, inverters, and batteries, are built in DIgSILENT;
- Step (9)
- Set models and parameters: Daily load and solar power generation curves are inserted into smart inverter and battery control models;
- Step (10)
- Select the best neighboring solutions: Select five groups of BESS capacities and locations from the solutions obtained in Step 7;
- Step (11)
- First transient screening: Set the output from Step 10 into the DIgSILENT. First, generator power smoothing is evaluated when the load changes, then three sets with better BESS capacities and positions are selected;
- Step (12)
- Second transient screening: Set the output from Step 11 into the DIgSILENT. In the event of a three-phase short-circuit fault at each bus in the power system, the final BESS capacity and location are selected by considering the short-term voltage stability index.
5. Simulation Results
5.1. Sample System
5.1.1. Solar Power Generation Model
5.1.2. Load Model
5.2. Setting Parameters
5.3. One BESS Case Study
5.4. Two BESSs Case Study
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mengi-Dinçer, H.; Ediger, V.; Yesevi, Ç. Evaluating the international renewable energy agency through the lens of social constructivism. Renew. Sustain. Energy Rev. 2021, 152, 111705. [Google Scholar] [CrossRef]
- Rebollal, D.; Carpintero-Rentería, M.; Santos-Martín, D.; Chinchilla, M. Microgrid and distributed energy resources standards and guidelines review: Grid connection and operation technical requirements. Energies 2021, 14, 523. [Google Scholar] [CrossRef]
- Photovoltaics, D.G.; Storage, E. IEEE standard for interconnection and interoperability of distributed energy resources with associated electric power systems interfaces. IEEE Std. 2018, 1547–2018. [Google Scholar] [CrossRef]
- Bae, Y.; Vu, T.-K.; Kim, R.-Y. Implemental control strategy for grid stabilization of grid-connected pv system based on german grid code in symmetrical low-to-medium voltage network. IEEE Trans. Energy Convers. 2013, 28, 619–631. [Google Scholar] [CrossRef]
- Wu, Y.-K.; Lin, J.-H.; Lin, H.-J. Standards and guidelines for grid-connected photovoltaic generation systems: A review and comparison. IEEE Trans. Ind. Appl. 2017, 53, 3205–3216. [Google Scholar] [CrossRef]
- Laugs, G.A.; Benders, R.M.; Moll, H.C. Balancing responsibilities: Effects of growth of variable renewable energy, storage, and undue grid interaction. Energy Policy 2020, 139, 111203. [Google Scholar] [CrossRef]
- Krata, J.; Saha, T.K. Real-time coordinated voltage support with battery energy storage in a distribution grid equipped with medium-scale pv generation. IEEE Trans. Smart Grid 2018, 10, 3486–3497. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, K.; Luo, F.; Yang, H.; Zhu, J.; Dong, Z.Y. Multi-agent-based voltage regulation scheme for high photovoltaic penetrated active distribution networks using battery energy storage systems. IEEE Access 2019, 8, 7323–7333. [Google Scholar] [CrossRef]
- Alzahrani, A.; Alharthi, H.; Khalid, M. Minimization of power losses through optimal battery placement in a distributed network with high penetration of photovoltaics. Energies 2019, 13, 140. [Google Scholar] [CrossRef]
- Wong, L.A.; Ramachandaramurthy, V.K.; Walker, S.L.; Taylor, P.; Sanjari, M.J. Optimal placement and sizing of battery energy storage system for losses reduction using whale optimization algorithm. J. Energy Storage 2019, 26, 100892. [Google Scholar] [CrossRef]
- Costa, J.A.d.; Castelo Branco, D.A.; Pimentel Filho, M.C.; Medeiros Júnior, M.F.d.; Silva, N.F.d. Optimal sizing of photovoltaic generation in radial distribution systems using lagrange multipliers. Energies 2019, 12, 1728. [Google Scholar] [CrossRef]
- Nor, N.M.; Ali, A.; Ibrahim, T.; Romlie, M.F. Battery storage for the utility-scale distributed photovoltaic generations. IEEE Access 2017, 6, 1137–1154. [Google Scholar] [CrossRef]
- Zhang, Y.; Campana, P.E.; Lundblad, A.; Yan, J. Comparative study of hydrogen storage and battery storage in grid connected photovoltaic system: Storage sizing and rule-based operation. Appl. Energy 2017, 201, 397–411. [Google Scholar] [CrossRef]
- Sardi, J.; Mithulananthan, N.; Gallagher, M.; Hung, D.Q. Multiple community energy storage planning in distribution networks using a cost-benefit analysis. Appl. Energy 2017, 190, 453–463. [Google Scholar] [CrossRef]
- Ganesan, S.; Subramaniam, U.; Ghodke, A.A.; Elavarasan, R.M.; Raju, K.; Bhaskar, M.S. Investigation on sizing of voltage source for a battery energy storage system in microgrid with renewable energy sources. IEEE Access 2020, 8, 188861–188874. [Google Scholar] [CrossRef]
- Naidji, I.; Smida, M.B.; Khalgui, M.; Bachir, A.; Li, Z.; Wu, N. Efficient allocation strategy of energy storage systems in power grids considering contingencies. IEEE Access 2019, 7, 186378–186392. [Google Scholar] [CrossRef]
- Nick, M.; Cherkaoui, R.; Paolone, M. Optimal allocation of dispersed energy storage systems in active distribution networks for energy balance and grid support. IEEE Trans. Power Syst. 2014, 29, 2300–2310. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Z.; Xiang, Y. Exploring economic criteria for energy storage system sizing. Energies 2019, 12, 2312. [Google Scholar] [CrossRef]
- Pham, T.T.; Kuo, T.-C.; Bui, D.M. Reliability evaluation of an aggregate battery energy storage system in microgrids under dynamic operation. Int. J. Electr. Power Energy Syst. 2020, 118, 105786. [Google Scholar] [CrossRef]
- Wang, Y.; Tan, K.; Peng, X.Y.; So, P.L. Coordinated control of distributed energy-storage systems for voltage regulation in distribution networks. IEEE Trans. Power Deliv. 2015, 31, 1132–1141. [Google Scholar] [CrossRef]
- Jayasekara, N.; Masoum, M.A.; Wolfs, P.J. Optimal operation of distributed energy storage systems to improve distribution network load and generation hosting capability. IEEE Trans. Sustain. Energy 2015, 7, 250–261. [Google Scholar] [CrossRef]
- Nayeripour, M.; Mahboubi-Moghaddam, E.; Aghaei, J.; Azizi-Vahed, A. Multi-objective placement and sizing of dgs in distribution networks ensuring transient stability using hybrid evolutionary algorithm. Renew. Sustain. Energy Rev. 2013, 25, 759–767. [Google Scholar] [CrossRef]
- Balu, K.; Mukherjee, V. Optimal siting and sizing of distributed generation in radial distribution system using a novel student psychology-based optimization algorithm. Neural Comput. Appl. 2021, 33, 15639–15667. [Google Scholar] [CrossRef]
- Mirjalili, S. Genetic algorithm. In Evolutionary Algorithms and Neural Networks; Springer: Beilin/Heideburg, Germany, 2019; pp. 43–55. [Google Scholar]
- Jiang, J.-J.; Wei, W.-X.; Shao, W.-L.; Liang, Y.-F.; Qu, Y.-Y. Research on large-scale bi-level particle swarm optimization algorithm. IEEE Access 2021, 9, 56364–56375. [Google Scholar] [CrossRef]
- Yue, L.; Chen, H. Unmanned vehicle path planning using a novel ant colony algorithm. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–9. [Google Scholar] [CrossRef]
- Shen, Y.; Ge, G. Multi-objective particle swarm optimization based on fuzzy optimality. IEEE Access 2019, 7, 101513–101526. [Google Scholar] [CrossRef]
- Chiu, W.-Y.; Yen, G.G.; Juan, T.-K. Minimum manhattan distance approach to multiple criteria decision making in multi-objective optimization problems. IEEE Trans. Evol. Comput. 2016, 20, 972–985. [Google Scholar] [CrossRef]
- Chi, Y.; Xu, Y. Multi-objective robust tuning of statcom controller parameters for stability enhancement of stochastic wind-penetrated power systems. IET Gener. Transm. Distrib. 2020, 14, 4805–4814. [Google Scholar] [CrossRef]
- Mahmud, K.; Azam, S.; Karim, A.; Zobaed, S.; Shanmugam, B.; Mathur, D. Machine learning based pv power generation forecasting in alice springs. IEEE Access 2021, 9, 46117–46128. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time, Hour | Power Generation Coefficient | Time, Hour | Power Generation Coefficient | Time, Hour | Power Generation Coefficient |
|---|---|---|---|---|---|
| 0–1 | 0 | 8–9 | 0.39 | 16–17 | 0.3448 |
| 1–2 | 0 | 9–10 | 0.6223 | 17–18 | 0.09206 |
| 2–3 | 0 | 10–11 | 0.7923 | 18–19 | 0.001702 |
| 3–4 | 0 | 11–12 | 0.9214 | 19–20 | 0 |
| 4–5 | 0 | 12–13 | 1 | 20–21 | 0 |
| 5–6 | 0 | 13–14 | 0.9612 | 21–22 | 0 |
| 6–7 | 0.00842 | 14–15 | 0.8576 | 22–23 | 0 |
| 7–8 | 0.1425 | 15–16 | 0.6394 | 23–24 | 0 |
| Time, Hour | Load Coefficient | Time, Hour | Load Coefficient | Time, Hour | Load Coefficient |
|---|---|---|---|---|---|
| 0–1 | 0.7586 | 8–9 | 0.9053 | 16–17 | 0.9872 |
| 1–2 | 0.7274 | 9–10 | 0.9633 | 17–18 | 0.9882 |
| 2–3 | 0.7029 | 10–11 | 0.9850 | 18–19 | 1 |
| 3–4 | 0.6880 | 11–12 | 0.9921 | 19–20 | 0.9827 |
| 4–5 | 0.6864 | 12–13 | 0.9343 | 20–21 | 0.9614 |
| 5–6 | 0.6940 | 13–14 | 0.9616 | 21–22 | 0.93375 |
| 6–7 | 0.7416 | 14–15 | 0.9759 | 22–23 | 0.8850 |
| 7–8 | 0.7962 | 15–16 | 0.9793 | 23–24 | 0.8360 |
| Item | Parameters |
|---|---|
| Number of iterations | 100 |
| Population size | 20 |
| Number of objectives | 3 |
| Number of constraints | 4 |
| Size of external archive | 100 |
| Number of divisions | 30 |
| Item | Feasible Ranges of Parameters |
|---|---|
| 0 | |
| 20 | |
| 0.25 | |
| 57.6923$/kW | |
| 0.00961538$/kW | |
| k | 0.2 |
| 0.47 | |
| 0.07 | |
| 5 | |
| Capacity for BESS | 100–500 kW |
| Location for BESS | 2–33 |
| Time, Hour | Capacity, kW | Location | Power Generation, MW | RVSI, p.u. |
|---|---|---|---|---|
| 0–1 | 419 | 33 | 0.090 | 8.817 |
| 1–2 | 424 | 33 | 0.065 | 10.490 |
| 2–3 | 409 | 33 | 0.063 | 9.742 |
| 3–4 | 386 | 33 | 0.062 | 9.834 |
| 4–5 | 397 | 33 | 0.061 | 10.367 |
| 5–6 | 397 | 33 | 0.062 | 9.924 |
| 6–7 | 409 | 33 | 0.066 | 9.317 |
| 7–8 | 394 | 33 | 0.071 | 9.542 |
| 8–9 | 319 | 31 | 0.078 | 11.452 |
| 9–10 | 330 | 29 | 0.083 | 10.977 |
| 10–11 | 340 | 14 | 0.087 | 7.588 |
| 11–12 | 325 | 17 | 0.089 | 7.584 |
| 12–13 | 301 | 14 | 0.082 | 8.233 |
| 13–14 | 329 | 17 | 0.088 | 5.146 |
| 14–15 | 322 | 15 | 0.087 | 7.254 |
| 15–16 | 357 | 30 | 0.085 | 10.247 |
| 16–17 | 422 | 32 | 0.087 | 9.784 |
| 17–18 | 351 | 33 | 0.089 | 9.807 |
| 18–19 | 354 | 33 | 0.090 | 9.751 |
| 19–20 | 335 | 33 | 0.088 | 10.088 |
| 20–21 | 331 | 33 | 0.086 | 9.095 |
| 21–22 | 352 | 33 | 0.084 | 10.413 |
| 22–23 | 354 | 33 | 0.079 | 9.983 |
| 23–24 | 344 | 33 | 0.075 | 9.698 |
| MMD | Power Loss, MW | Voltage Deviation, p.u. | Cost, $ | Power Generation, MW | RVSI, p.u. | Capacity, kW | Location |
|---|---|---|---|---|---|---|---|
| 0.7886 | 0.1714 | 1.54 × 10−3 | 40,902 | 0.06701 | 10.241 | 417 | 31 |
| 0.7890 | 0.1717 | 1.56 × 10−3 | 40,502 | 0.06742 | 9.6534 | 405 | 33 |
| 0.7904 | 0.1720 | 1.58 × 10−3 | 40,102 | 0.06638 | 9.3171 | 409 | 33 |
| 0.7908 | 0.1708 | 1.50 × 10−3 | 41,702 | 0.06820 | 424 | 31 | |
| 0.7960 | 0.1703 | 1.46 × 10−3 | 42,402 | 0.06832 | 401 | 32 |
| Algorithm | Power Loss, MW | Voltage Deviation, p.u. | Cost, $ | Power Generation, MW | RVSI, p.u. | Capacity, kW | Location |
|---|---|---|---|---|---|---|---|
| MOPSO | 0.1720 | 1.58 × 10−3 | 40,102 | 0.06638 | 9.3171 | 409 | 33 |
| PSO | 0.1836 | 2.42 × 10−3 | 26,802 | 0.07254 | 11.582 | 268 | 27 |
| Time, Hour | Capacity, kW | Location | Power Generation, MW | RVSI, p.u. |
|---|---|---|---|---|
| 0–1 | 477 176 | 33 16 | 0.056 | 8.0737 |
| 1–2 | 465 178 | 33 16 | 0.054 | 8.847 |
| 2–3 | 453 237 | 33 14 | 0.051 | 5.895 |
| 3–4 | 458 100 | 32 14 | 0.050 | 7.912 |
| 4–5 | 410 171 | 33 15 | 0.051 | 7.645 |
| 5–6 | 500 191 | 33 16 | 0.052 | 7.017 |
| 6–7 | 415 100 | 32 17 | 0.056 | 8.214 |
| 7–8 | 346 272 | 32 14 | 0.058 | 7.125 |
| 8–9 | 317 330 | 32 16 | 0.066 | 6.018 |
| 9–10 | 326 269 | 31 15 | 0.070 | 7.231 |
| 10–11 | 234 323 | 31 15 | 0.071 | 6.708 |
| 11–12 | 120 295 | 32 16 | 0.073 | 7.905 |
| 12–13 | 315 183 | 18 9 | 0.074 | 7.264 |
| 13–14 | 194 300 | 30 16 | 0.069 | 8.342 |
| 14–15 | 108 495 | 29 14 | 0.069 | 6.780 |
| 15–16 | 292 321 | 33 15 | 0.072 | 7.582 |
| 16–17 | 351 330 | 32 15 | 0.072 | 7.108 |
| 17–18 | 456 244 | 33 16 | 0.073 | 6.710 |
| 18–19 | 500 216 | 33 15 | 0.074 | 6.357 |
| 19–20 | 500 165 | 33 13 | 0.072 | 7.733 |
| 20–21 | 453 174 | 33 16 | 0.072 | 8.114 |
| 21–22 | 465 189 | 33 31 | 0.077 | 6.393 |
| 22–23 | 500 160 | 33 14 | 0.065 | 6.092 |
| 23–24 | 456 188 | 33 14 | 0.061 | 6.833 |
| MMD | Power Loss, MW | Voltage Deviation, p.u. | Cost, $ | Power Generation, MW | RVSI, p.u. | Capacity, kW | Location |
|---|---|---|---|---|---|---|---|
| 0.6876 | 0.1447 | 8.764 × 10−4 | 59,002 | 0.05383 | 7.8523 | 463 127 | 33 15 |
| 0.6882 | 0.1406 | 10.66 × 10−4 | 60,602 | 0.05445 | 417 189 | 32 17 | |
| 0.6956 | 0.1458 | 7.697 × 10−4 | 60,102 | 0.05380 | 8.4645 | 500 100 | 33 14 |
| 0.6991 | 0.1459 | 11.02 × 10−4 | 55,002 | 0.05521 | 404 146 | 33 18 | |
| 0.6992 | 0.1360 | 7.65 × 10−4 | 60,002 | 0.05141 | 5.8953 | 453 237 | 33 14 |
| Algorithm | Power Loss, MW | Voltage Deviation, p.u. | Cost, $ | Power Generation, MW | RVSI, p.u. | Capacity, kW | Location |
|---|---|---|---|---|---|---|---|
| MOPSO | 0.1360 | 7.65 × 10−4 | 60,002 | 0.05141 | 5.8953 | 453 237 | 33 14 |
| PSO | 0.1756 | 3.12 × 10−3 | 21,902 | 0.06543 | 10.842 | 100 119 | 32 16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, N.-C.; Zhang, Y.-C.; Adinda, E.W. Sizing and Sitting of Battery Energy Storage Systems in Distribution Networks with Transient Stability Consideration. Mathematics 2022, 10, 3420. https://doi.org/10.3390/math10193420
Yang N-C, Zhang Y-C, Adinda EW. Sizing and Sitting of Battery Energy Storage Systems in Distribution Networks with Transient Stability Consideration. Mathematics. 2022; 10(19):3420. https://doi.org/10.3390/math10193420
Chicago/Turabian StyleYang, Nien-Che, Yong-Chang Zhang, and Eunike Widya Adinda. 2022. "Sizing and Sitting of Battery Energy Storage Systems in Distribution Networks with Transient Stability Consideration" Mathematics 10, no. 19: 3420. https://doi.org/10.3390/math10193420
APA StyleYang, N.-C., Zhang, Y.-C., & Adinda, E. W. (2022). Sizing and Sitting of Battery Energy Storage Systems in Distribution Networks with Transient Stability Consideration. Mathematics, 10(19), 3420. https://doi.org/10.3390/math10193420