1. Introduction
For a real number and an initial quadrilateral , one can construct the quadrilateral such that , , , and divide the segments , , and , respectively, in the ratio . Continuing this process, one obtains the terms , whose terms are referred to as Kasner (or nested) quadrilaterals (after E. Kasner (1878–1955) who initiated these studies). A natural problem is to find the numbers for which the sequence is convergent.
The related dynamic geometries inspired by simple iterations (especially for triangles) are reviewed in the article [
1]:
generated by the incircle and the circumcircle of a triangle, the pedal triangle [
2], the orthic triangle, and the incentral triangle. Similar recursive systems describing dynamic geometries are considered by S. Abbot [
3], G. Z. Chang and P. J. Davis [
4], R. J. Clarke [
5], J. Ding, L. R. Hitt, and X-M. Zhang [
6], L. R. Hitt and X-M. Zhang [
7], and D. Ismailescu and J. Jacobs [
8], or in the works by Dionisi et al. [
9] and Roeschel [
10]. In the paper [
1], we proved that the sequence of Kasner triangles is convergent if and only if
, also providing the order of convergence.
Here, we prove similar results for the Kasner quadrilaterals, given by the complex coordinates of their vertices
,
,
,
,
(see the notation in [
11]). The iterations are defined recursively for
as:
In this paper, we investigate the dynamic geometry generated by the sequence
, when
is a complex number. Notice that when
is complex, the quadrilaterals
are not always nested. The work extends results for triangles in [
12], preparing the ground for the study of the general case of Kasner polygons.
4. Dynamical Properties in the Case of Complex Parameter
We now discuss the dynamics obtained when is a complex number.
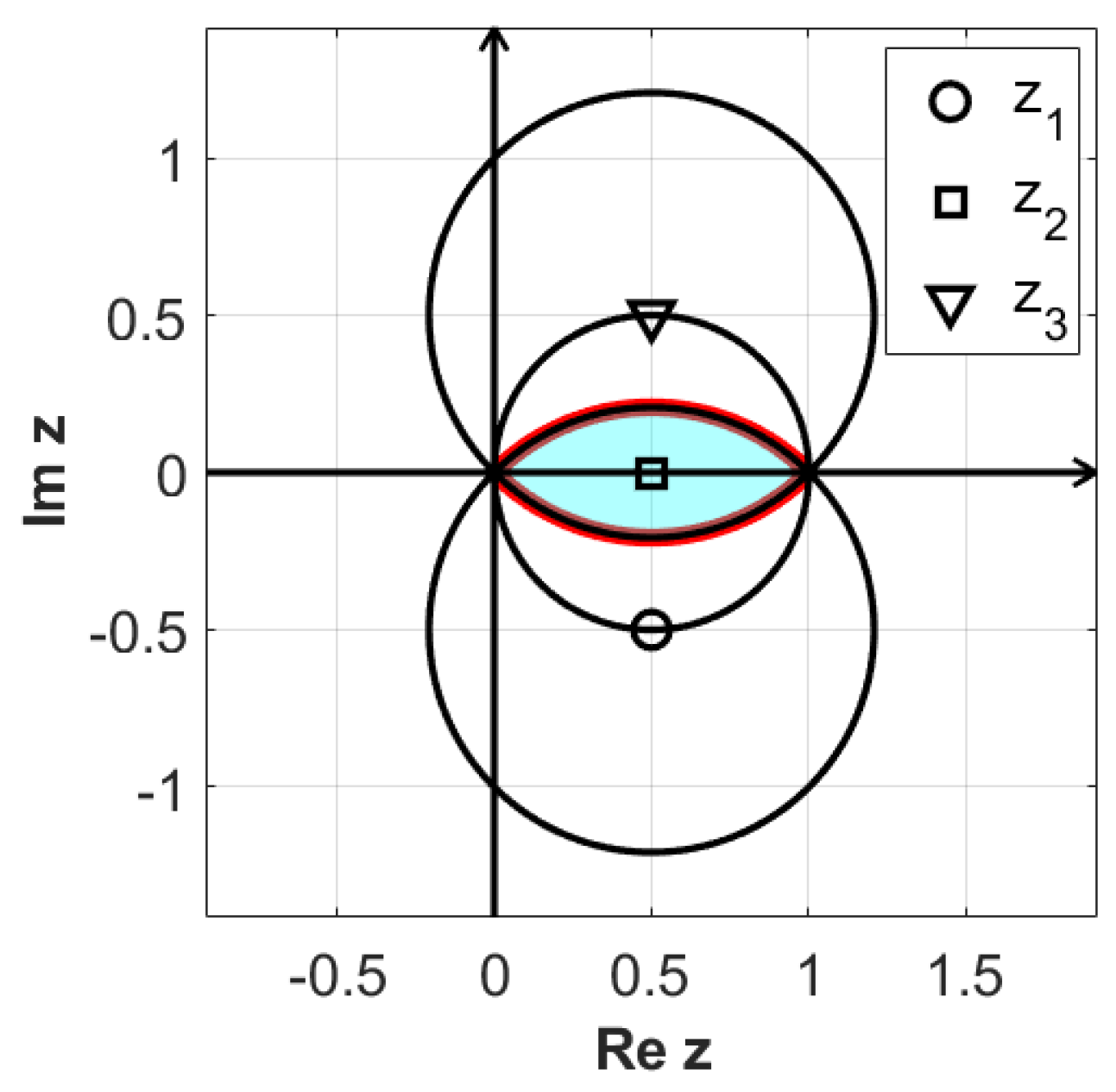
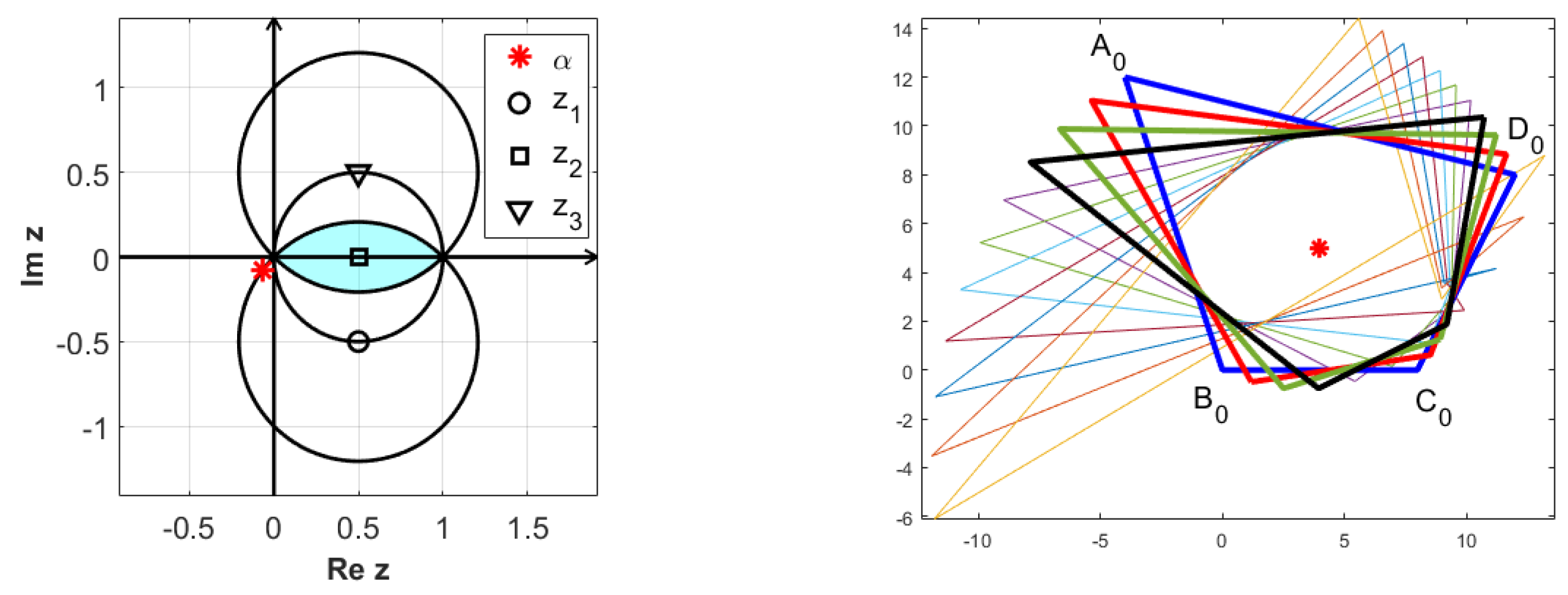
It is convenient to define the following points
representing the centres of the open disks
and of the circles depicted in
Figure 1Considering the real numbers
, by (4), (5), and (6), we obtain
By (
16), we deduce that for a given
, if
, then we have
. Moreover, if
, then it follows that
. The distinct behaviours below emerge:
If , then .
One can easily check the set inclusion .
If is in the interior of the complement of , then .
If , then .
The boundary of the shaded region in
Figure 1 consists of two arcs
which can be parametrised as
To describe the orbits of the sequences
,
,
, and
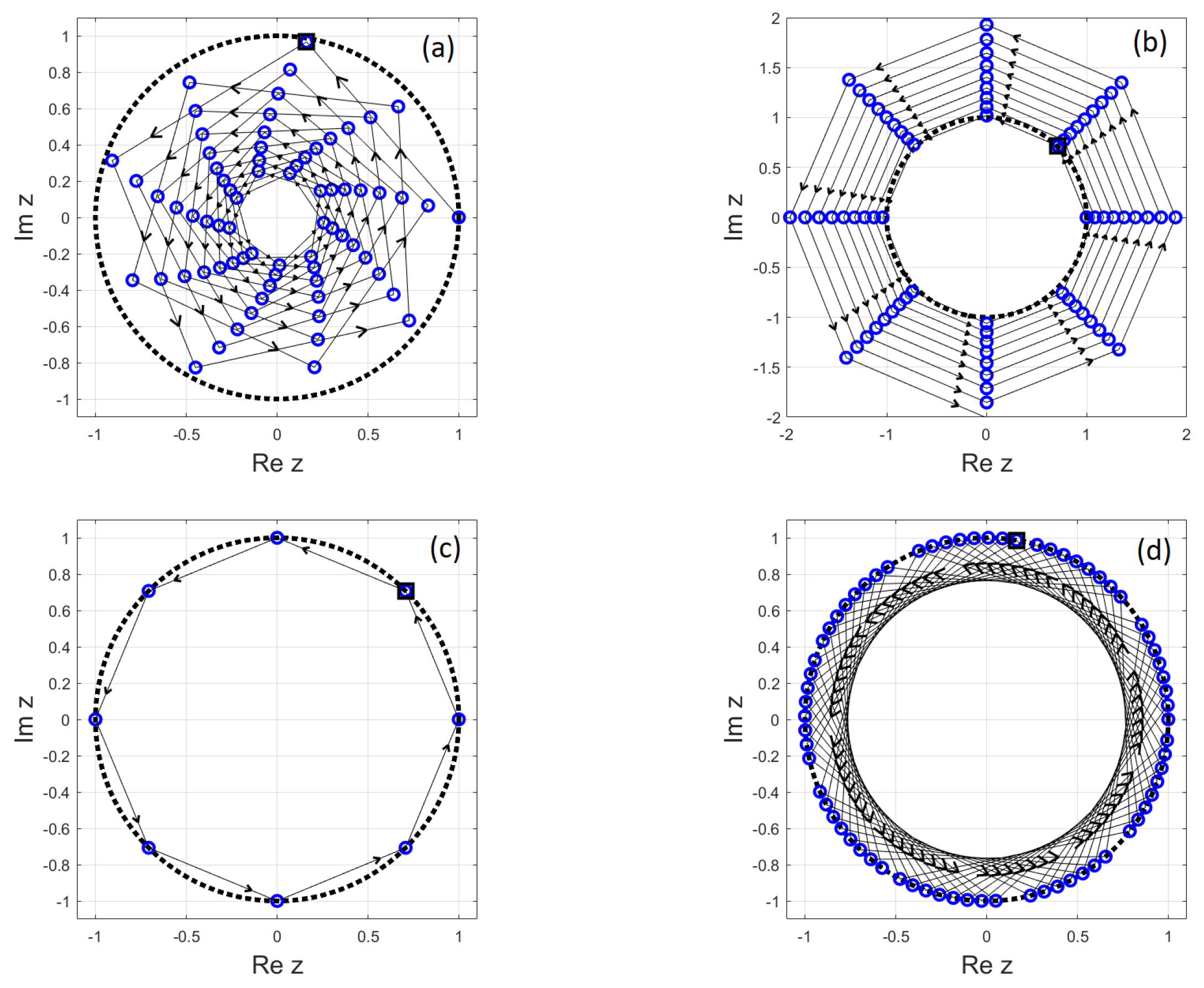
, one first needs to understand the behaviour of the sequence
, where
(see, for example, Lemma 2.1 in [
13], or Lemma 5.2 in [
14]), which is shown in
Figure 2.
Lemma 1. Let , where , . The orbit of is:
A spiral convergent to 0 for ;
A divergent spiral for ;
A regular gon if z is a primitive th root of unity, ;
A dense subset of the unit circle if and .
When is irreducible, then the terms of the spirals obtained in (a) and (b) align along k rays.
To prove part (d), we use that
for
and
m integers. By Kronecker’s Lemma ([
15], Theorem 442), the set
is dense in the set of real numbers
; hence, the set
is dense within the unit circle.
As linear combinations of
,
, and
, the sequences
,
,
, and
, given by the explicit Formula (
10) in the complex plane, exhibit the following behaviour.
Lemma 2. The patterns produced by Formula (10) are summarized below: - 1.
Convergent if ;
- 2.
Divergent if ;
- 3.
Periodic if (that is, when or );
- 4.
There are two distinct patterns when .
Denoting if or if , then the orbit:
- (a)
Has k convergent subsequences if is an irreducible fraction;
- (b)
Is dense within a circle when θ is irrational.
The details of the geometric patterns obtained in each case are presented below.
In all figures, we consider the initial polygon of complex coordinates
for which Formula (
11) gives the values
The position of relative to relevant boundaries is indicated in the left diagram with a star, while the iterations of the polygon are displayed on the right, where the star indicates the position of the centroid. All the simulations have been implemented in Matlab® 2021b.
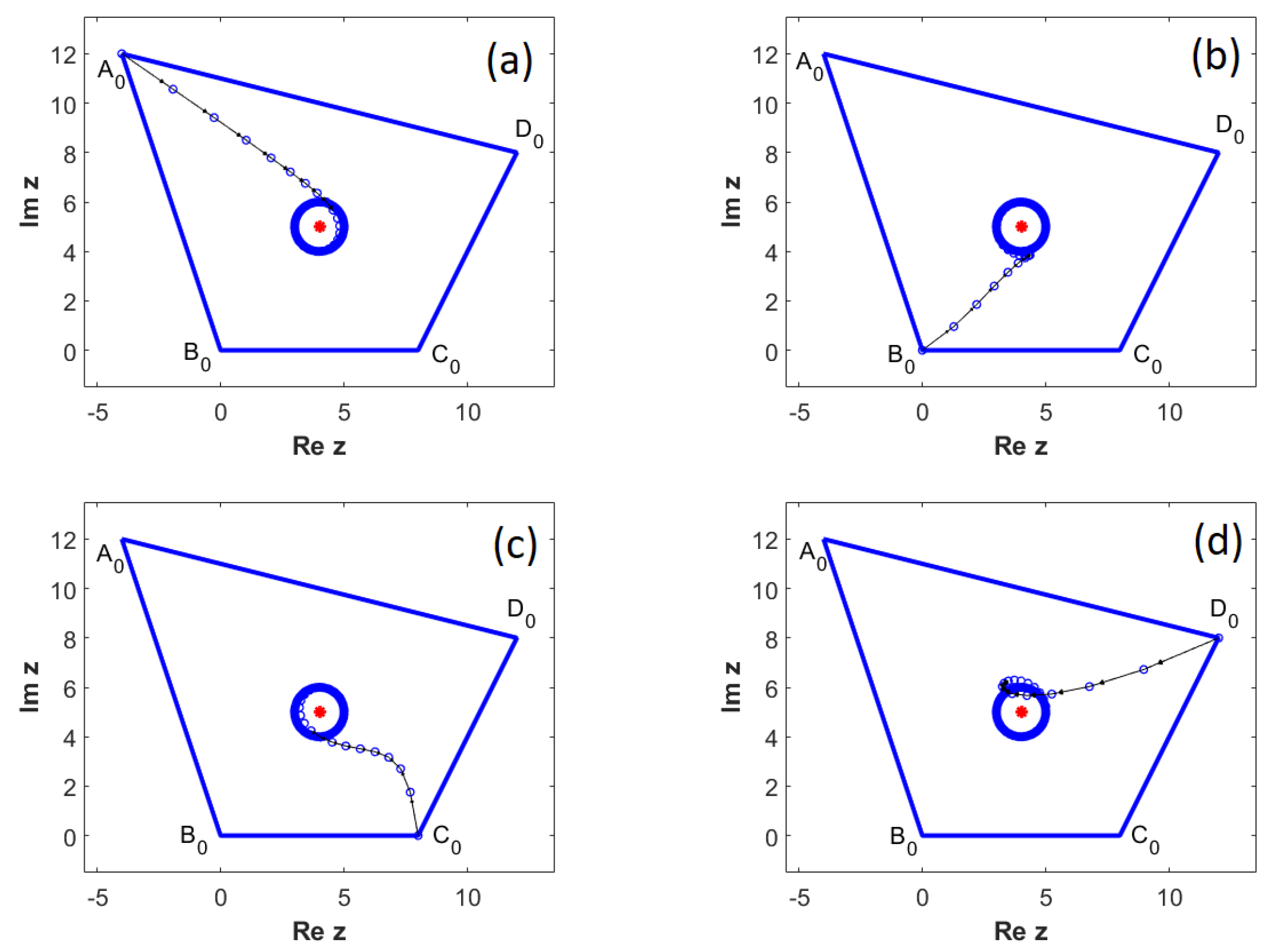
4.1. Convergent Orbits
If
, then by (
16), the sequences
,
, and
are convergent if and only if
. Hence, by (
10), we obtain that
,
,
, and
converge to
. We can formulate the following result.
Theorem 1. The following assertions hold:
- (1)
The sequence is convergent if and only if .
- (2)
When the sequence is convergent, its limit is the degenerated quadrilateral at , the centroid of the initial quadrilateral .
Proof. The intersection
is shaded in
Figure 1.
Clearly,
is equivalent to
and
(in this case, one also has
). The relation (
10) shows that the sequences
,
,
, and
are convergent if and only if
,
, and
are convergent, which happens when
,
, and
.
Adding the equation in the system (
1), one obtains that for every integer
, we have
, where
is the complex coordinates of the centroid
of the initial quadrilateral
. Assume that
,
,
, and
. From system (
1), we obtain
Because , the only solution of this system is . □
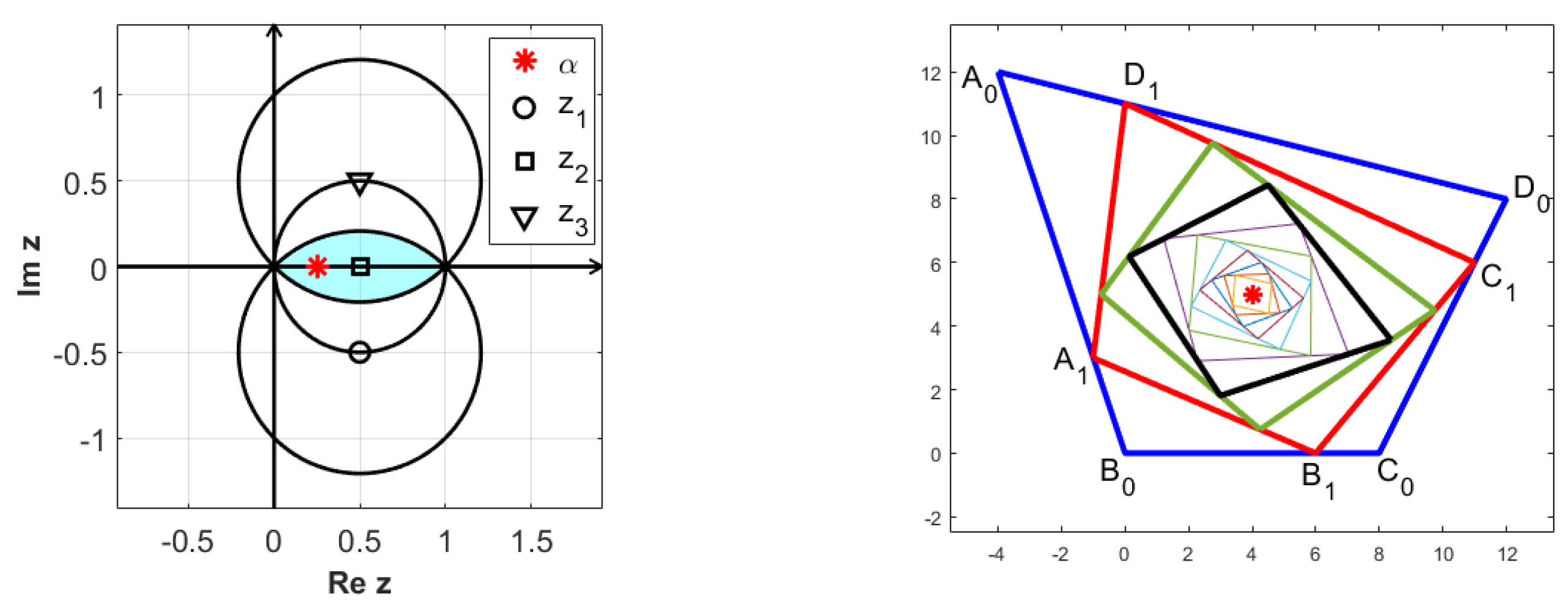
For
, one has
, and moreover, in this case, the vertices
,
,
,
are interior points of the segments
,
,
, and
, respectively. Such an example is depicted in
Figure 3.
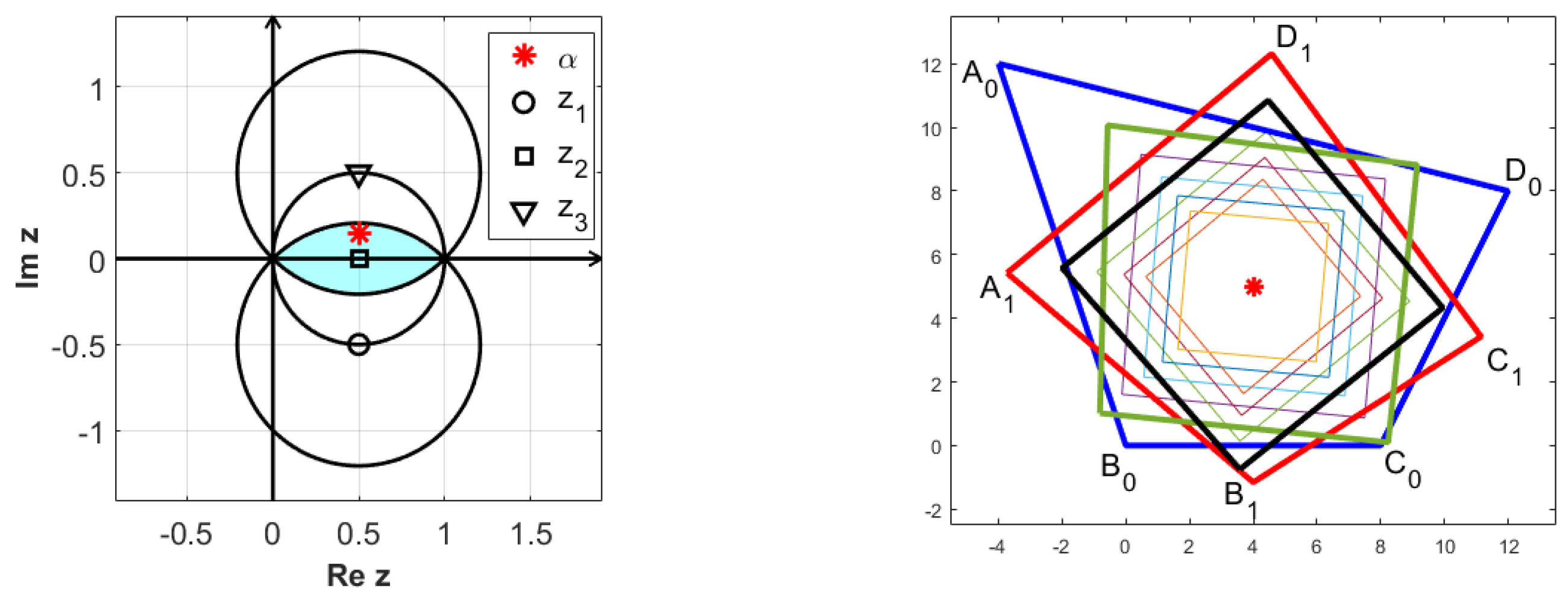
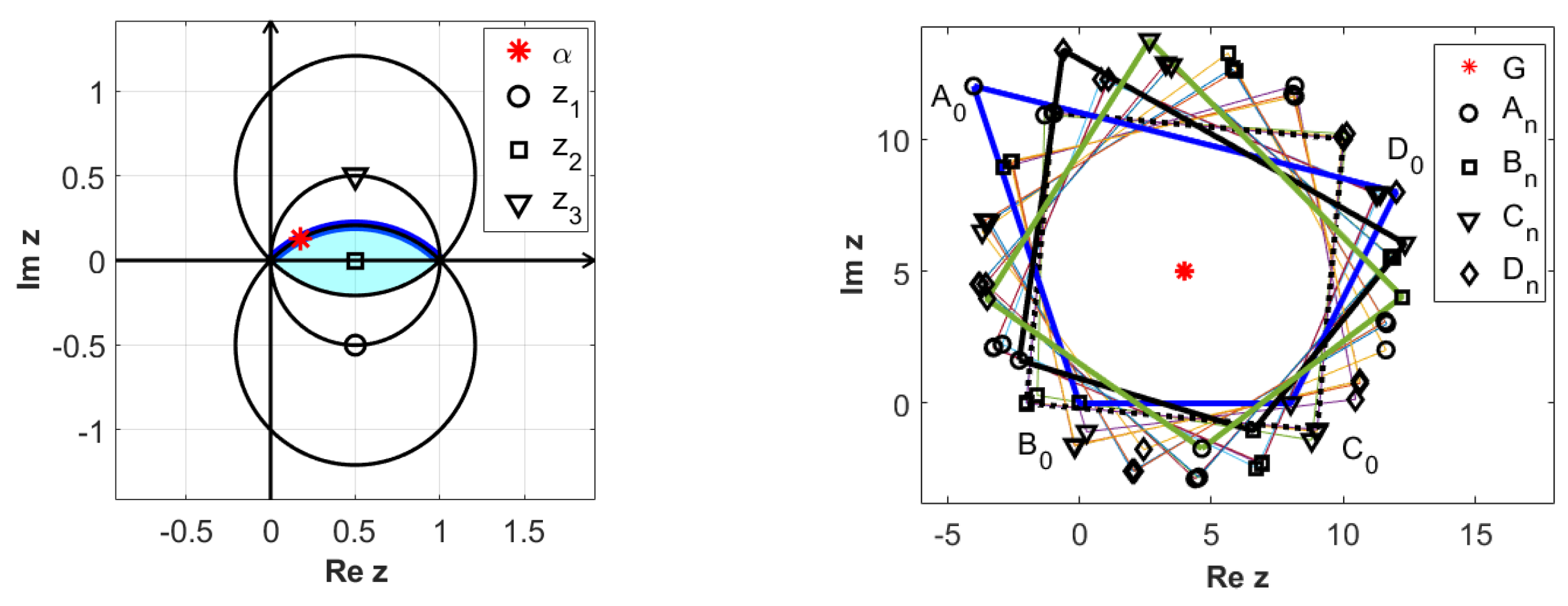
On the other hand, when the parameter
is not real, the orbit is convergent, but the points are not aligned any more, as illustrated in
Figure 4.
4.2. Periodic Orbits
If , then and , which can only happen for .
Case 1. . From the system (
1), for all
, one obtains
Similarly,
,
, and
, so the sequence terms satisfy
Case 2.. From the system (
1), for all
, one obtains
so, in this case, the sequences are actually constant.
4.3. Divergent Orbits
If
, then
; hence, by (
16), either
or
are divergent. By Formula (
10), the sequences
,
,
, and
are divergent (as long as the corresponding coefficients
M,
N,
P in (
10) are not all vanishing).
Figure 5 shows a divergent iteration. The diagram on the left we plot the position of
, while on the right side we illustrate the polygons
,
.
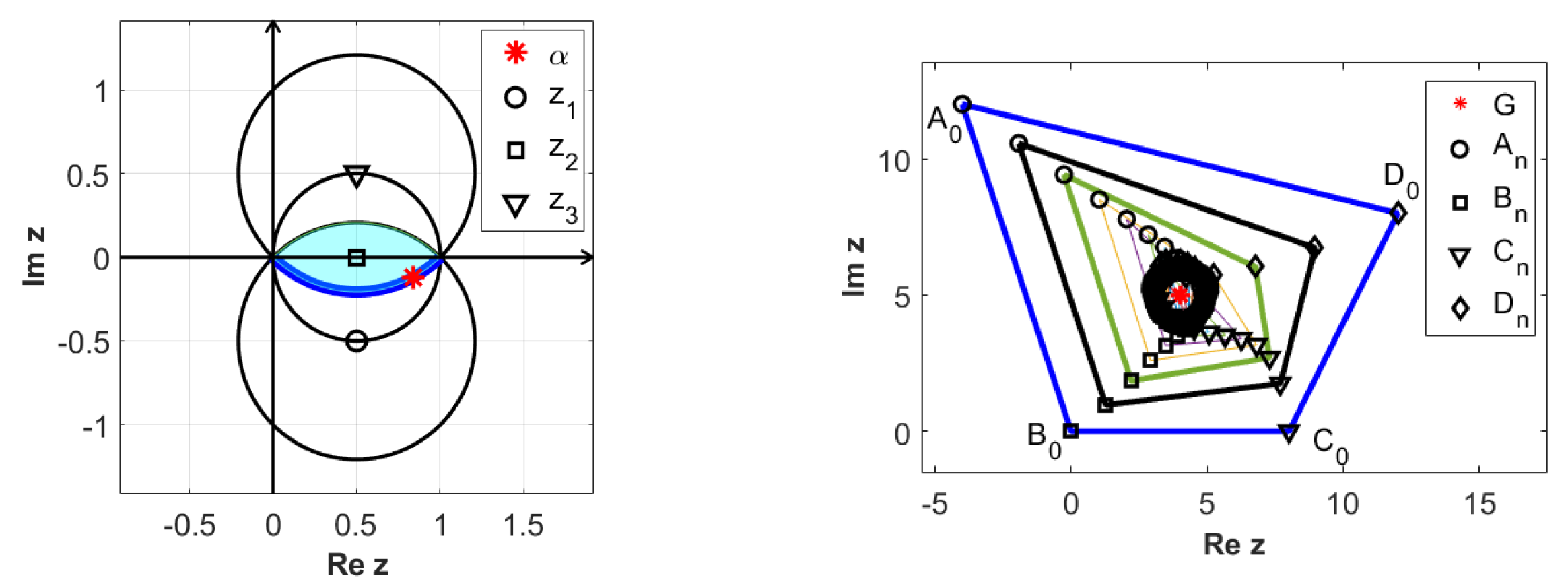
4.4. Orbits with a Finite Number of Convergent Subsequences
If , then one either has for , or for . The orbit has a finite number of limit points if the complex argument of if or of if is rational.
4.4.1. Upper Arc of
First, assume that , i.e., is on the upper arc .
As
, there is
with
, so by (
16), we obtain
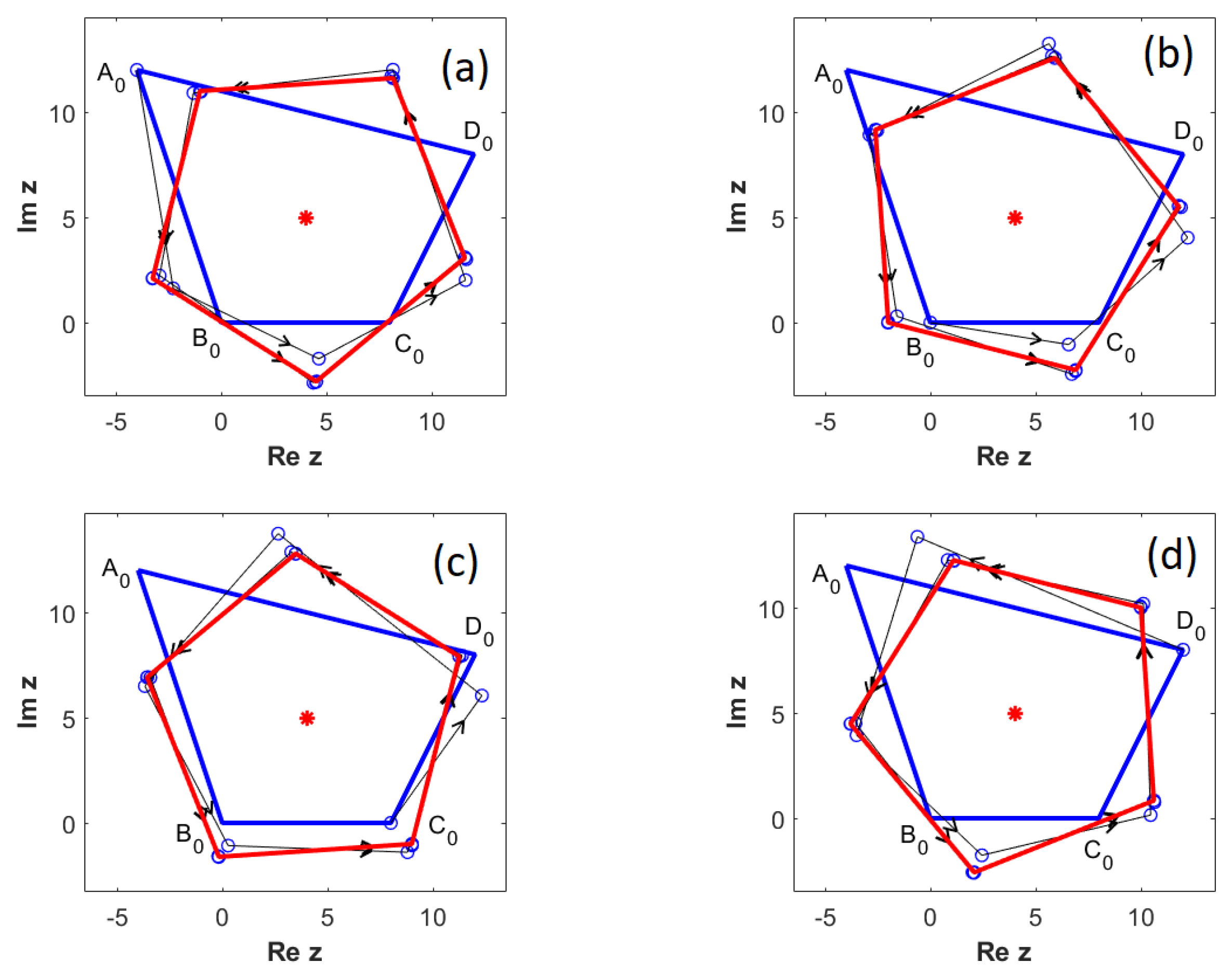
When is an irreducible fraction, the orbit has a finite number of convergent subsequences. Therefore, we have the following result.
Theorem 2. If for the integers , we have is an irreducible fraction, then and by Formula (10), the sequences , , , and have subsequences which converge to the vertices of a regular gon centred at of radius . Proof. In this case, we have
for
and
and
, so using the notations of (
10) and (
11), one obtains the relations
which ends the proof. This case is depicted in
Figure 6. The sequences
,
,
, and
are plotted in
Figure 7. Moreover, one can check that for
the limit polygon is a pentagon centred at
, of radius
(by (
19)). □
4.4.2. Lower Arc of
Similarly, if
, then
is on the arc
defined by (
17). Therefore, there is
with
, and by (
16), we obtain
The following result can be proved similarly to Theorem 2.
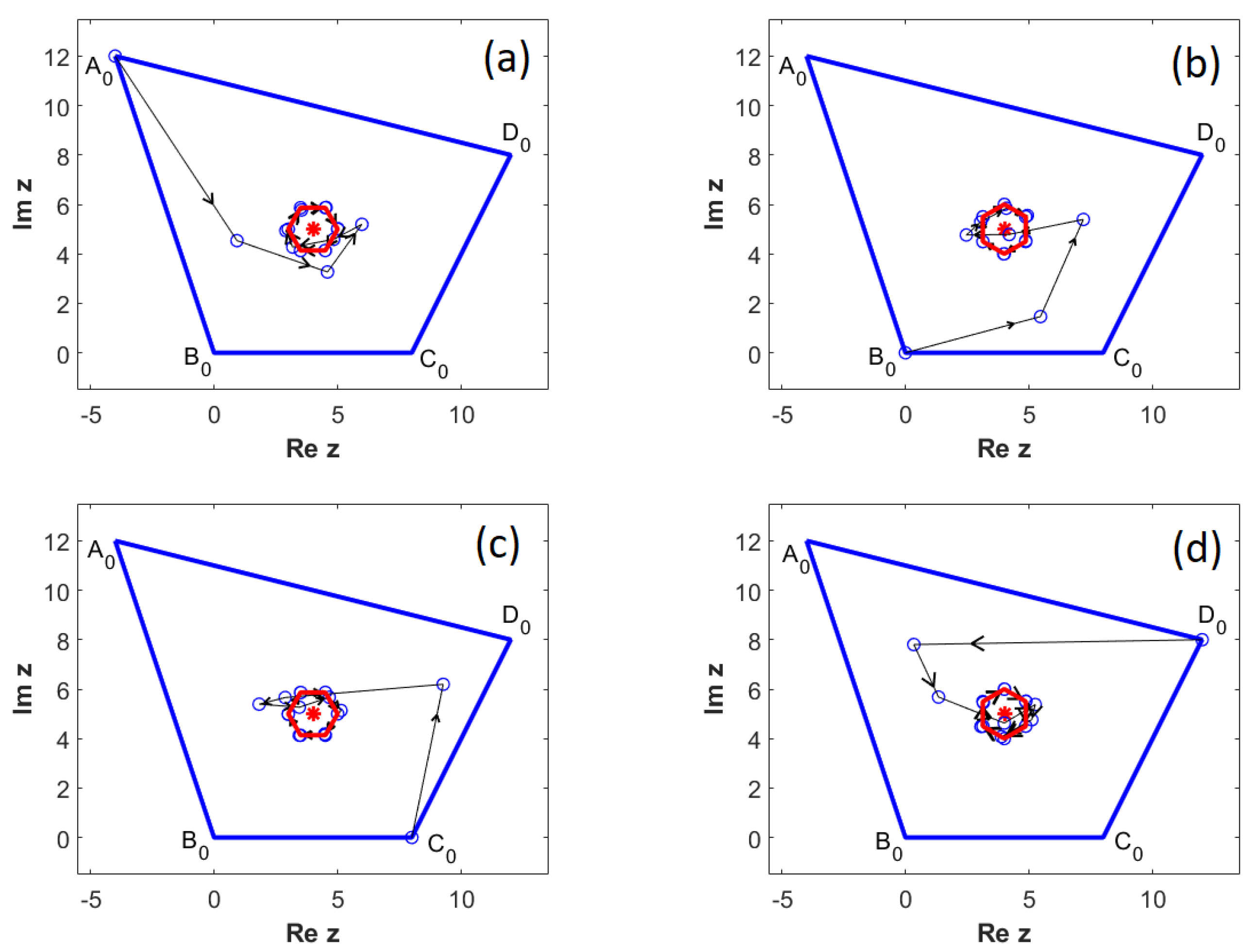
Theorem 3. If for the integers , we have is an irreducible fraction, then and by Formula (10), the sequences , , , and have q subsequences convergent to the vertices of four regular gons centred at of radius . The first 200 iterations obtained when
are presented in
Figure 8.
The sequences
,
,
, and
are plotted in
Figure 9. Similarly to (
23), the limit polygon is a hexagon centred at
G, which has radius
.
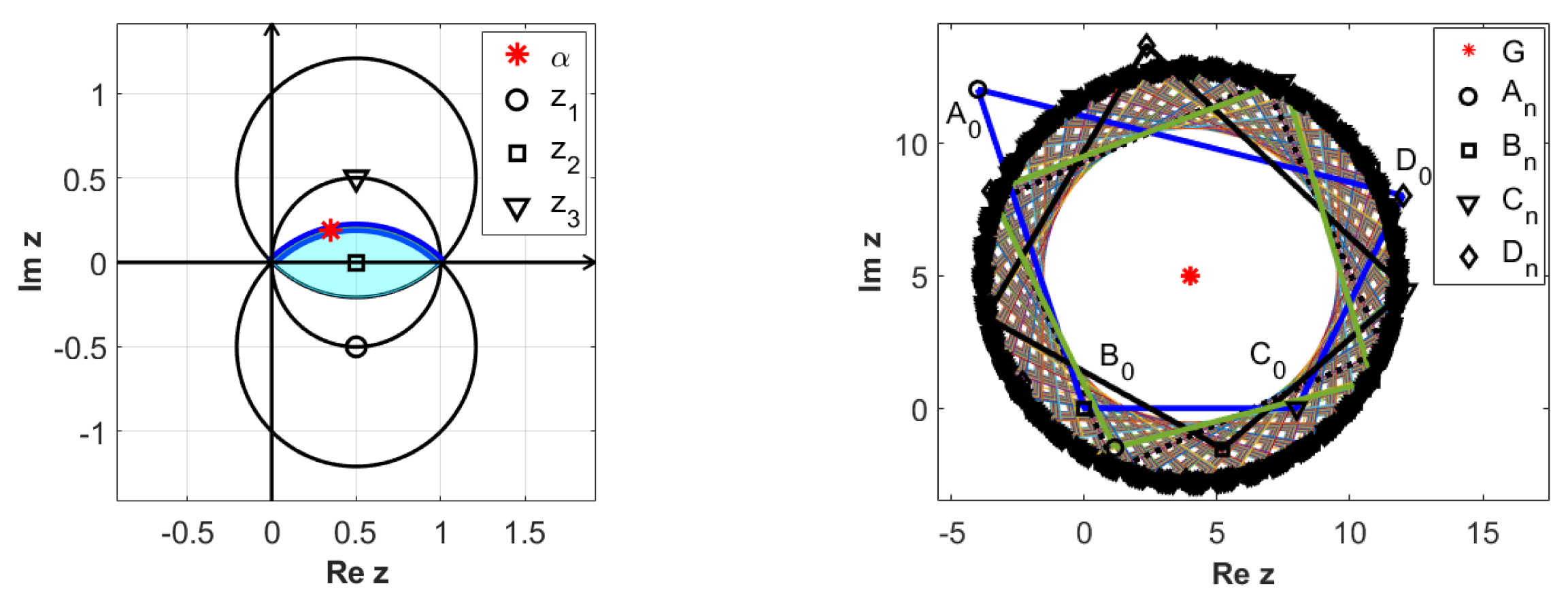
4.5. Dense Orbits
When but or are irrational modulo , the orbits of , , , and are dense within circles.
4.5.1. Upper Arc of
First, assume that
, i.e.,
is on the upper arc
. Using the notations in (
22), the following result can be deduced from Lemma 1 (d).
Theorem 4. If and is irrational, then the set of limit points for each of the sequences , , , and is the circle centred at of radius .
Proof. By (
10), we have
, with
M,
N, and
P constants given by (
11). Because
,
, we have
, where
.
Let
z be an arbitrary point on the circle of centre
and radius
. If
, then
. Otherwise, denoting
, we have
. Because
with
irrational, by Lemma (1), it follows that there is a subsequence
such that
. For
, one can find
and
such that
hence, for
, one obtains
hence
. This shows that
z is a limit point for the sequence
. Analogously, this is proved for
,
and
. □
Figure 10 illustrates the position of
and the polygons obtained for
iterations, respectively, when
.
Figure 11 depicts the vertices of the original quadrilateral of affixes
,
,
, and
, and 200 iterations.
4.5.2. Lower Arc of
When
,
is on the arc
defined by (
17), as in
Figure 12. Using the notations in (
24), we can formulate the following result.
Theorem 5. If and is irrational, then the set of limit points for each of the sequences , , , and is the circle centred at of radius .
Proof. The proof follows the similar lines as for Theorem 4, but now by (
10), one has
. Because
,
, we obtain
, where
.
Figure 12 shows the position of
and the first
iterations, respectively, when
.
Figure 13 plots the vertices of the original quadrilateral of affixes
,
,
, and
, and 200 iterations. □




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












