
A Novel Driving-Strategy Generating Method of Collision Avoidance for Unmanned Ships Based on Extensive-Form Game Model with Fuzzy Credibility Numbers


Abstract
:1. Introduction
1.1. Literature Review
1.2. Goals and Contributions
2. Research Basis
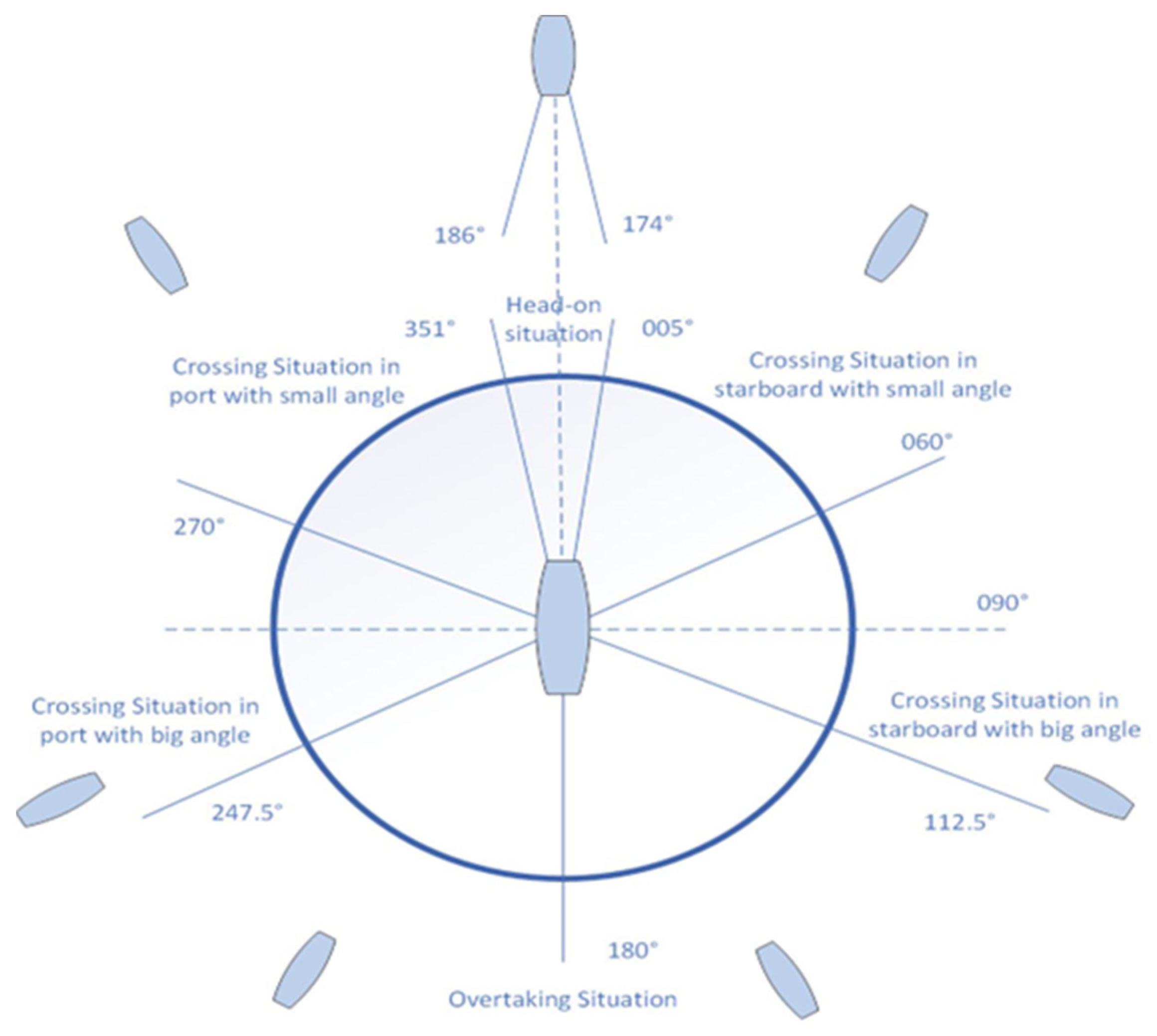
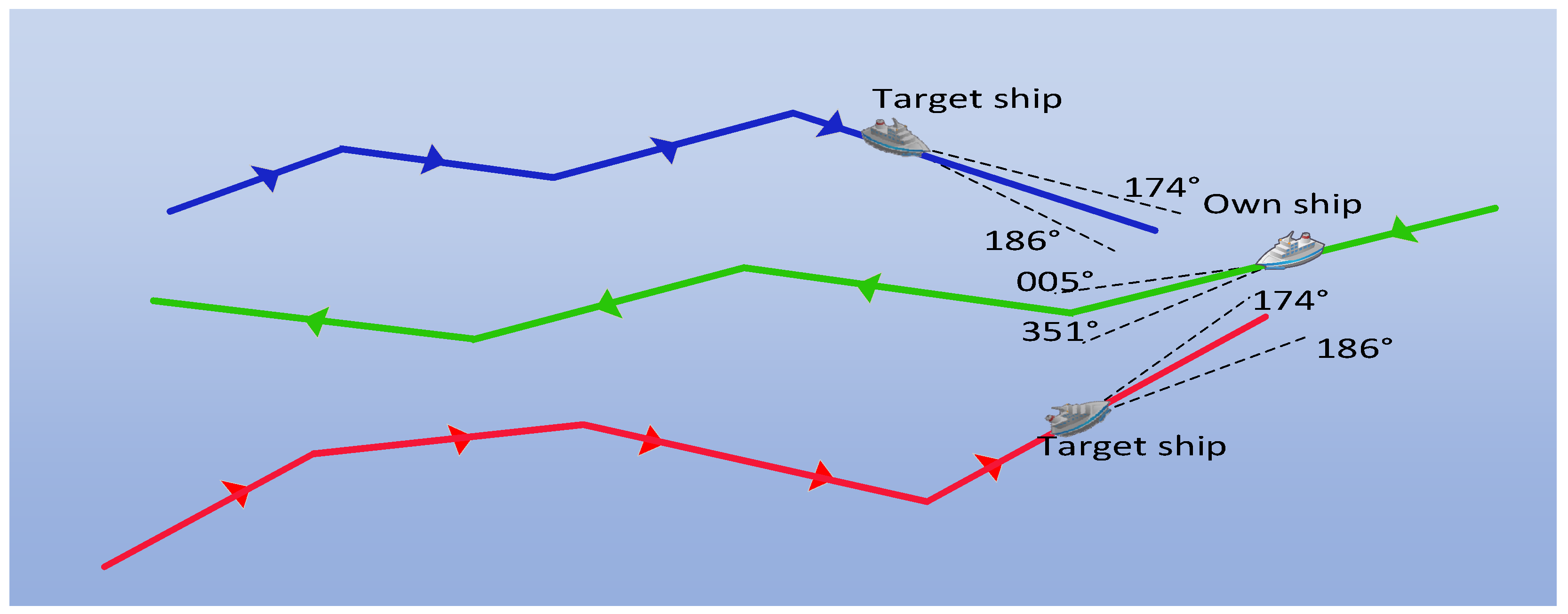
2.1. Route Conflict Situation Identification
2.2. Judgment of Head-On Ship Situation
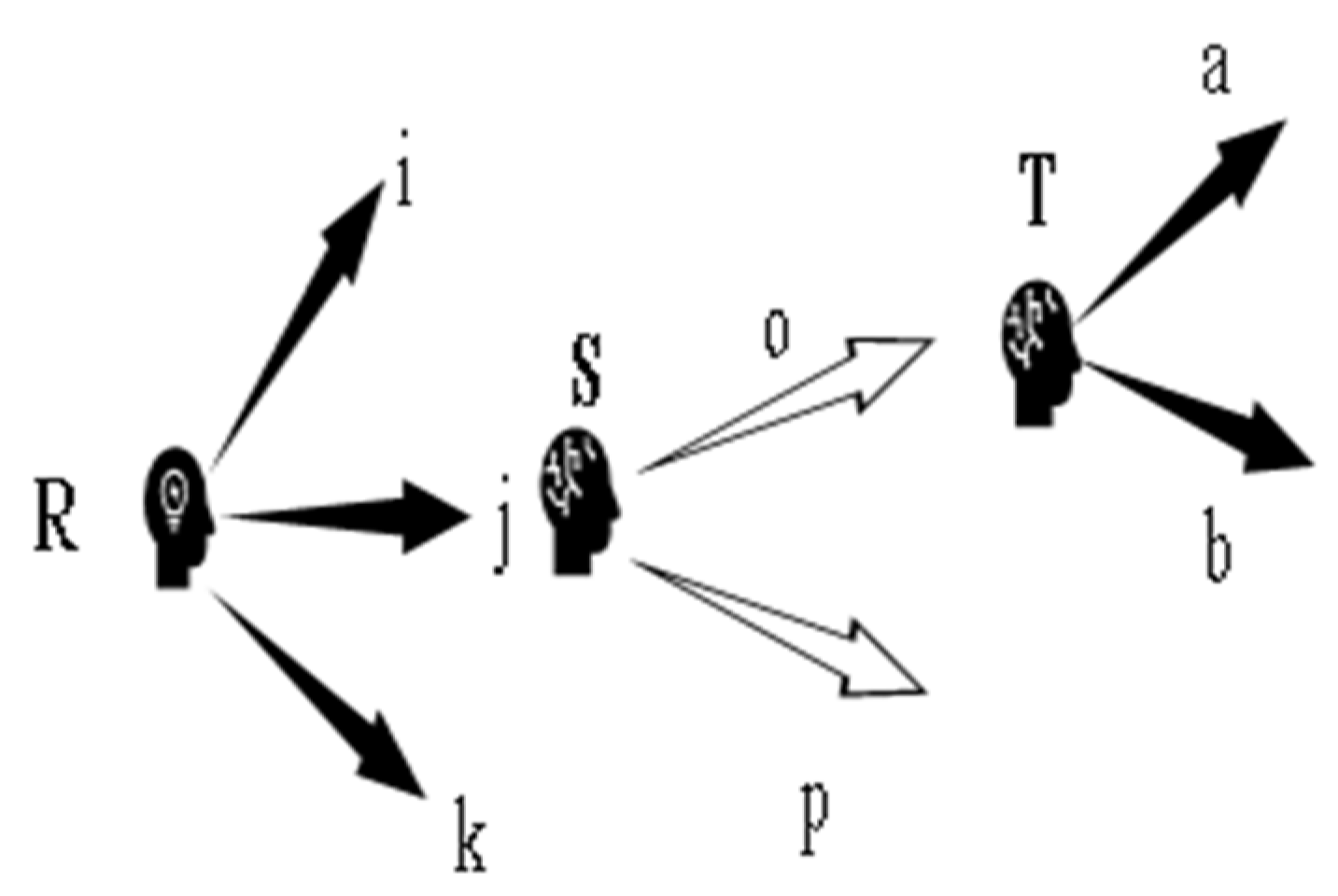
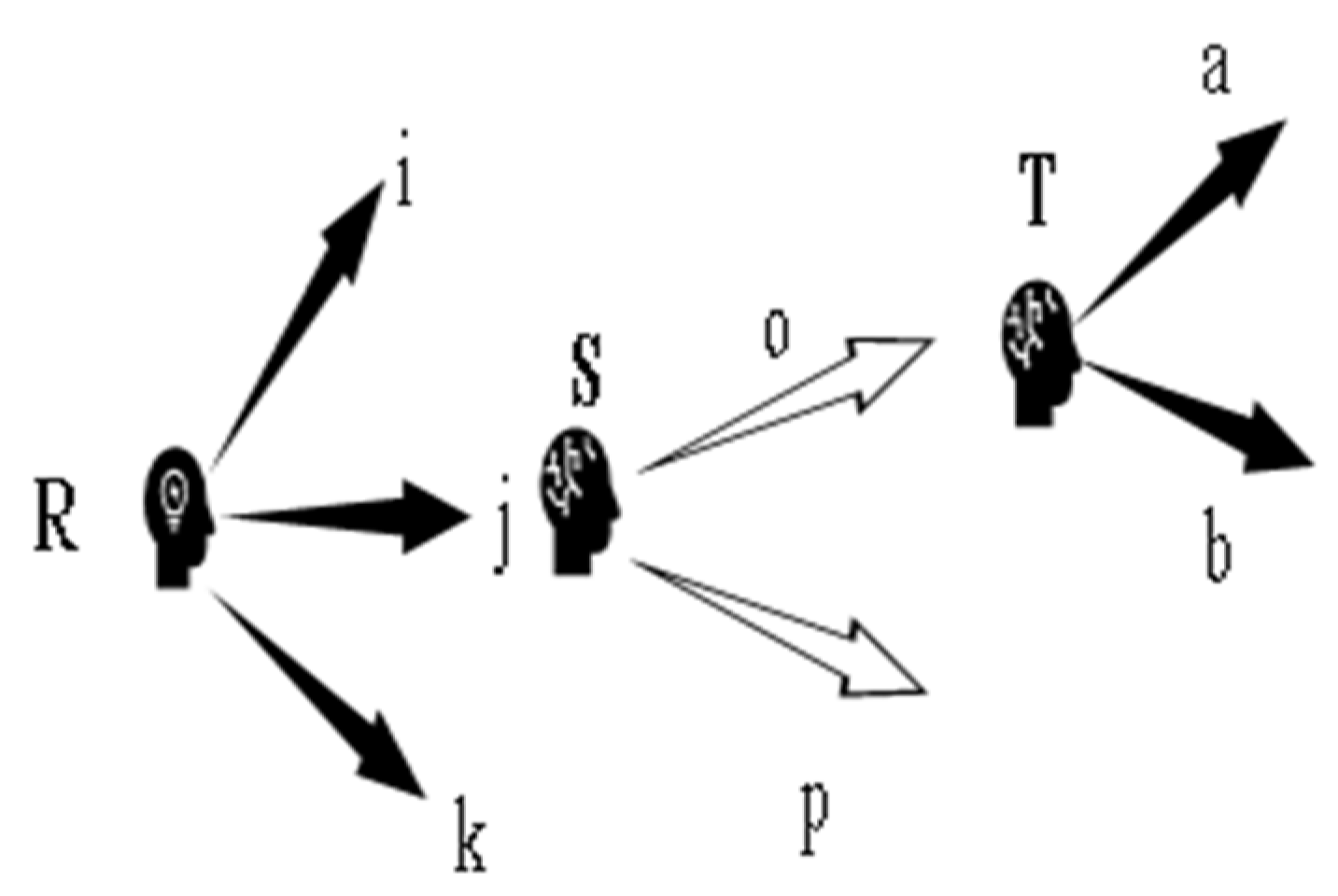
2.3. Extensive-Form Game Model Tree
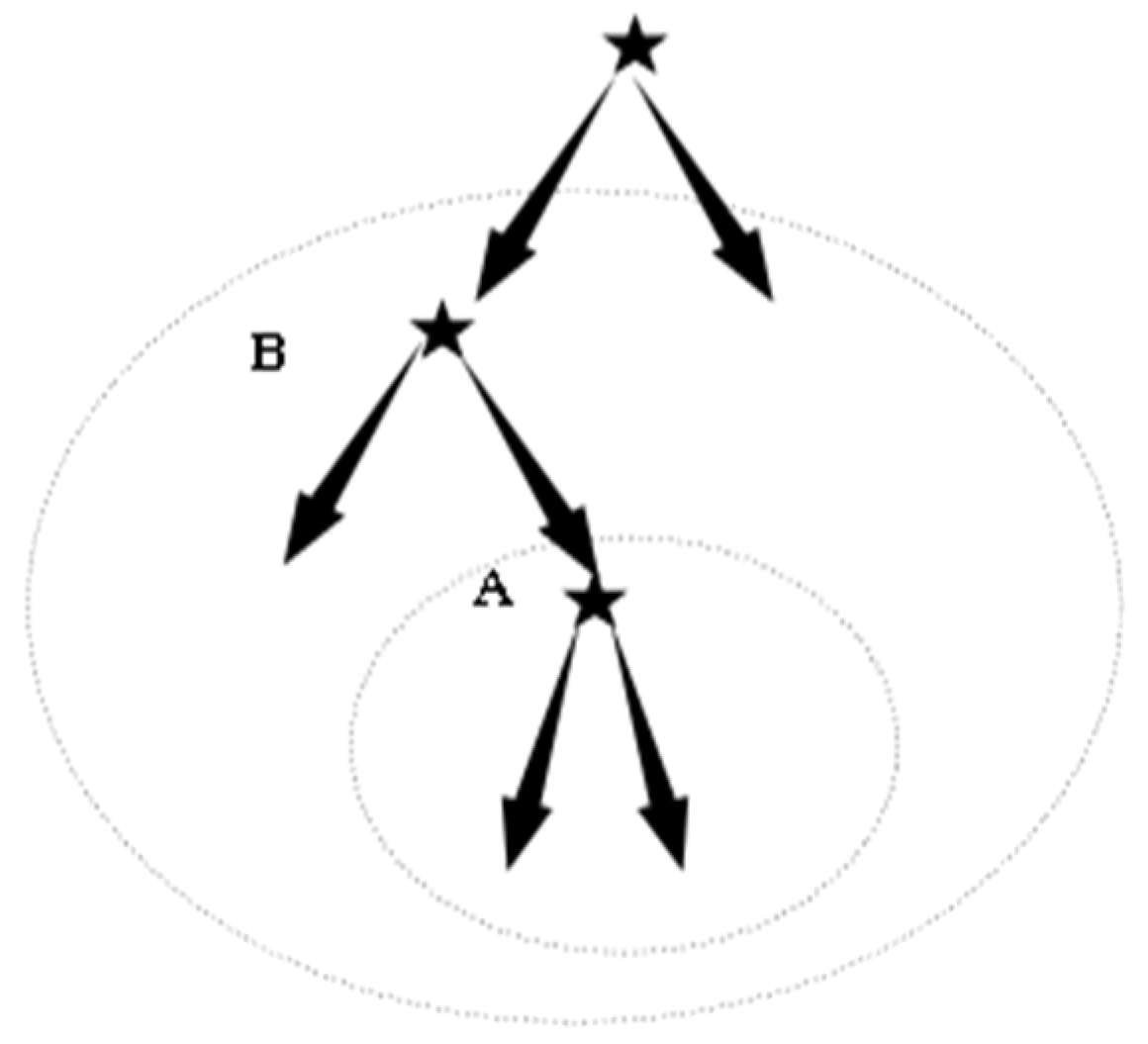
2.4. Sub-Game Refinement Nash Equilibrium
3. Unmanned Ship Collision Avoidance Model in Two-Sides Clamp Scenario
3.1. A Novel Ship Collision Avoidance Model
3.2. Expansion of Unmanned Ship Collision Avoidance Game Tree
3.3. Collision Risk Fuzzy Credibility Number
4. Illustrative Example
4.1. Problem Introduction
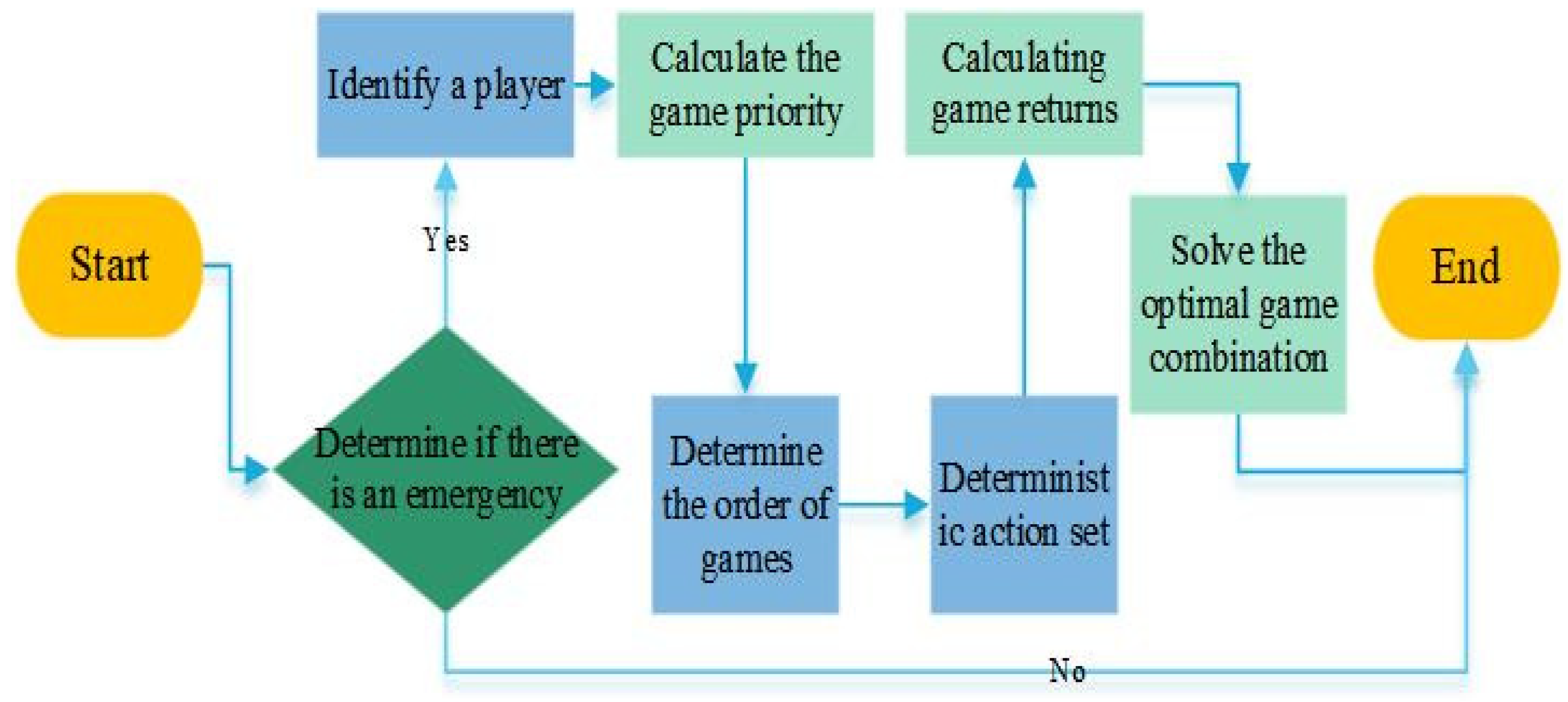
4.2. Simulation Process and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dinh, G.H.; Im, N.K. The combination of analytical and statistical method to define polygonal ship domain and reflect human experiences in estimating dangerous area. Int. J. e-Navig. Marit. Econ. 2016, 4, 97–108. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Li, J.; Wang, H.; Zhao, W.; Xue, Y. Ship’s trajectory planning based on improved multiobjective algorithm for collision avoidance. J. Adv. Transp. 2019, 2019, 4068783. [Google Scholar] [CrossRef]
- Lee, Y.I.; Kim, S.G.; Kim, Y.G. Fuzzy relational product for collision avoidance of autonomous ships. Intell. Autom. Soft Comput. 2015, 21, 21–38. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Cong, L.; Li, J.; Zhang, J. Research on intelligent collision avoidance decision-making of unmanned ship in unknown environments. Evol. Syst. Ger. 2019, 10, 649–658. [Google Scholar] [CrossRef]
- Xing, S.; Xie, H.; Zhang, W. A method for unmanned vessel autonomous collision avoidance based on model predictive control. Syst. Sci. Control. Eng. 2022, 10, 255–263. [Google Scholar] [CrossRef]
- Lisowski, J. The safety of marine navigation based on a game theory. Risk Anal. 2014, 47, 467–478. [Google Scholar]
- Lisowski, J. Analysis of methods of determining the safe ship trajectory. TransNav 2016, 10, 2. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, Y.; Ma, Z. Emergency Situation Safety Evaluation of Marine Ship Collision Accident Based on Extension Cloud Model. J. Mar. Sci. Eng. 2021, 9, 1370. [Google Scholar] [CrossRef]
- Tu, Y.; Xiong, Y.; Mou, J. Decision-making method for multi-ship collision avoidance based on improved extensive game model. Marit. Technol. Res. 2022, 4, 4. [Google Scholar] [CrossRef]
- Ran, P.; Li, W.; Bao, R.; Ma, P. A simulation credibility assessment method based on improved fuzzy comprehensive evaluation. J. Syst. Simul. 2020, 32, 2469. [Google Scholar]
- Ye, J.; Song, J.; Du, S.; Rui, Y. Weighted aggregation operators of fuzzy credibility numbers and their decision-making approach for slope design schemes. Comput. Appl. Math. 2021, 40, 155. [Google Scholar] [CrossRef]
- Vercher, E.; Rubio, A.; Bermúdez, J.D. Fuzzy prediction intervals using credibility distributions. Eng. Proc. 2021, 5, 51. [Google Scholar]
- Zhou, J.; Ding, F.; Yang, J. Navigation safety domain and collision risk index for decision support of collision avoidance of USVs. Int. J. Nav. Arch. Ocean. 2021, 13, 340–350. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean. Eng. 2015, 105, 336–348. [Google Scholar]
- Liu, R.W.; Liang, M.; Nie, J. Deep learning-powered vessel trajectory prediction for improving smart traffic services in maritime Internet of Things. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3080–3094. [Google Scholar] [CrossRef]
- Li, Q.; Fan, H.S.L. A simulation model for detecting vessel conflicts within a seaport. Trans. Nav. 2012, 6, 11–17. [Google Scholar]
- Li, G.; Yang, Y.; Zhang, T.; Qu, X.; Cao, D.; Cheng, B.; Li, K. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios. Transp. Res. Part C Emerg. Technol. 2021, 122, 102820. [Google Scholar] [CrossRef]
- De, R.; Mahapatra, R.P.; Chakraborty, P.S. Exploring and Expanding the World of Artificial Intelligence. Int. J. Comput. Appl. 2016, 975, 8887. [Google Scholar] [CrossRef]
- Bueno, L.F.; Haeser, G.; Rojas, F.N. Optimality conditions and constraint qualifications for generalized Nash equilibrium problems and their practical implications. SIAM J. Optimiz. 2019, 29, 31–54. [Google Scholar] [CrossRef]
- Etessami, K. The complexity of computing a (quasi-) perfect equilibrium for an n-player extensive form game. Game Econ. Behav. 2021, 125, 107–140. [Google Scholar] [CrossRef]
- Fei, L.; Feng, Y. A dynamic framework of multi-attribute decision making under Pythagorean fuzzy environment by using Dempster–Shafer theory. Eng. Appl. Artif. Intell. 2021, 101, 104213. [Google Scholar] [CrossRef]
- Zilu, O.; Hongdong, W.; Jianyao, W. Automatic collision avoidance algorithm for unmanned surface vessel based on improved Bi-RRT algorithm. Chin. J. Ship Res. 2019, 14, 9. [Google Scholar]
- Kishimoto, A.; Winands, M.H.M.; Müller, M. Game-tree search using proof numbers: The first twenty years. ICGA J. 2012, 35, 131–156. [Google Scholar] [CrossRef]
- Goerlandt, F.; Kujala, P. On the reliability and validity of ship–ship collision risk analysis in light of different perspectives on risk. Saf. Sci. 2014, 62, 348–365. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, A.; Tian, W. Multi-ship collision avoidance decision-making based on a collision risk index. J. Mar. Sci. Eng. 2020, 8, 640. [Google Scholar] [CrossRef]
- Li, S.; Zheng, Z.; Mi, J. The latest minute action of ship. ICTETS SPIE 2021, 12058, 644–649. [Google Scholar]
- Liu, H.; Fang, Z.; Li, R. Credibility-based chance-constrained multimode resource-constrained project scheduling problem under fuzzy uncertainty. Comput. Ind. Eng. 2022, 171, 108402. [Google Scholar] [CrossRef]
- Senapati, T.; Yager, R.R. Fermatean fuzzy sets. J. Amb. Intel. Hum. Comp. 2020, 11, 663–674. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship Parameters | |||||||
|---|---|---|---|---|---|---|---|
| Vr | 24 kn | t2 | 1800 s | D | 6 n mile | Uθ | 0.9558 |
| φr | 180° | 0 n mile | D1 | 0.9057 n mile | UD | 0 | |
| d1 | 1.12 n mile | 900 s | D2 | 4.278 n mile | UK | 0.4143 | |
| d2 | 2.21 n mile | UDCPA | 1 | t1 | 135.874 s | CRI | 0.5912 |
| θ | 0° | UTCPA | 0.2926 |
| Time/s | Vessel | Decision | Course Angle | The Abscissa (Nautical Miles) | Y-Coordinate (Nautical Miles) | Offset (Nautical Miles) | Sum of Offset | Risk Collision Index |
|---|---|---|---|---|---|---|---|---|
| initial time | A | 0° | 5 | 1 | 0 | 0 | 0.5911 | |
| B | 180° | 5 | 7 | 0 | ||||
| 0 | A | Turn right 10 ° | 10° | 5 | 1 | 0 | 0 | 0.5911 |
| B | Turn right 20° | 200° | 5 | 7 | 0 | |||
| 300 | A | Turn right 10° | 20° | 5.1736 | 1.9848 | 0.1743 | 0.5216 | 0.4635 |
| B | Turn left 10° | 190° | 4.658 | 6.0603 | 0.3473 | |||
| 600 | A | Turn left 10° | 10° | 5.5157 | 2.9245 | 0.5212 | 1.0423 | 0.4329 |
| B | Turn left 10° | 190° | 4.4843 | 5.755 | 0.5212 | |||
| 900 | A | Restore the course | 10° | 5.6893 | 3.9093 | 0.6953 | 1.2164 | 0.4803 |
| B | Restore the course | 180° | 4.4843 | 4.0755 | 0.5212 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, H.; Zhang, F.; Li, M.; Cui, Y.; Wang, R. A Novel Driving-Strategy Generating Method of Collision Avoidance for Unmanned Ships Based on Extensive-Form Game Model with Fuzzy Credibility Numbers. Mathematics 2022, 10, 3316. https://doi.org/10.3390/math10183316
Cui H, Zhang F, Li M, Cui Y, Wang R. A Novel Driving-Strategy Generating Method of Collision Avoidance for Unmanned Ships Based on Extensive-Form Game Model with Fuzzy Credibility Numbers. Mathematics. 2022; 10(18):3316. https://doi.org/10.3390/math10183316
Chicago/Turabian StyleCui, Haotian, Fangwei Zhang, Mingjie Li, Yang Cui, and Rui Wang. 2022. "A Novel Driving-Strategy Generating Method of Collision Avoidance for Unmanned Ships Based on Extensive-Form Game Model with Fuzzy Credibility Numbers" Mathematics 10, no. 18: 3316. https://doi.org/10.3390/math10183316
APA StyleCui, H., Zhang, F., Li, M., Cui, Y., & Wang, R. (2022). A Novel Driving-Strategy Generating Method of Collision Avoidance for Unmanned Ships Based on Extensive-Form Game Model with Fuzzy Credibility Numbers. Mathematics, 10(18), 3316. https://doi.org/10.3390/math10183316